Известны гироскопические устройства для автоматической становкп курса судов и самолетов, в которых азимутальная коррекция гиромо;ора осуществляется магнитным компасом, снабженным горизонтальным корректорам, ири иомощи какой-либо известной телепередающей системы, основанной, например, на исиользоваиии иотенциометрического датчика; унравляемого компасом. В ряде случаев гироскоп и корректирующая его система магнитного компаса объединяются в одиом приборе.
Особенность пред;1агаемого гирома1лнггного дистанционного датчика курса заключается в том, что, для возможности применения в датчике магнитной системы с большим магннтны.м моментом, магнитная система подвешена на струне непосредственно к осн вертикальной рамки гироскопической системы.
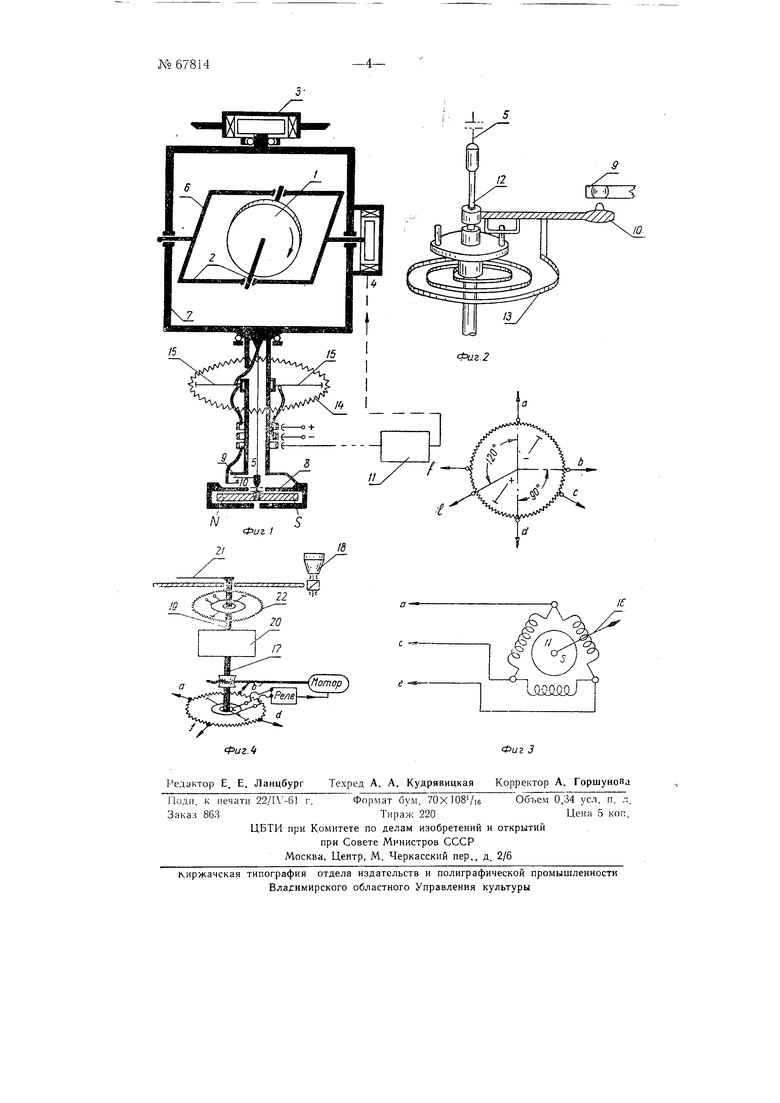
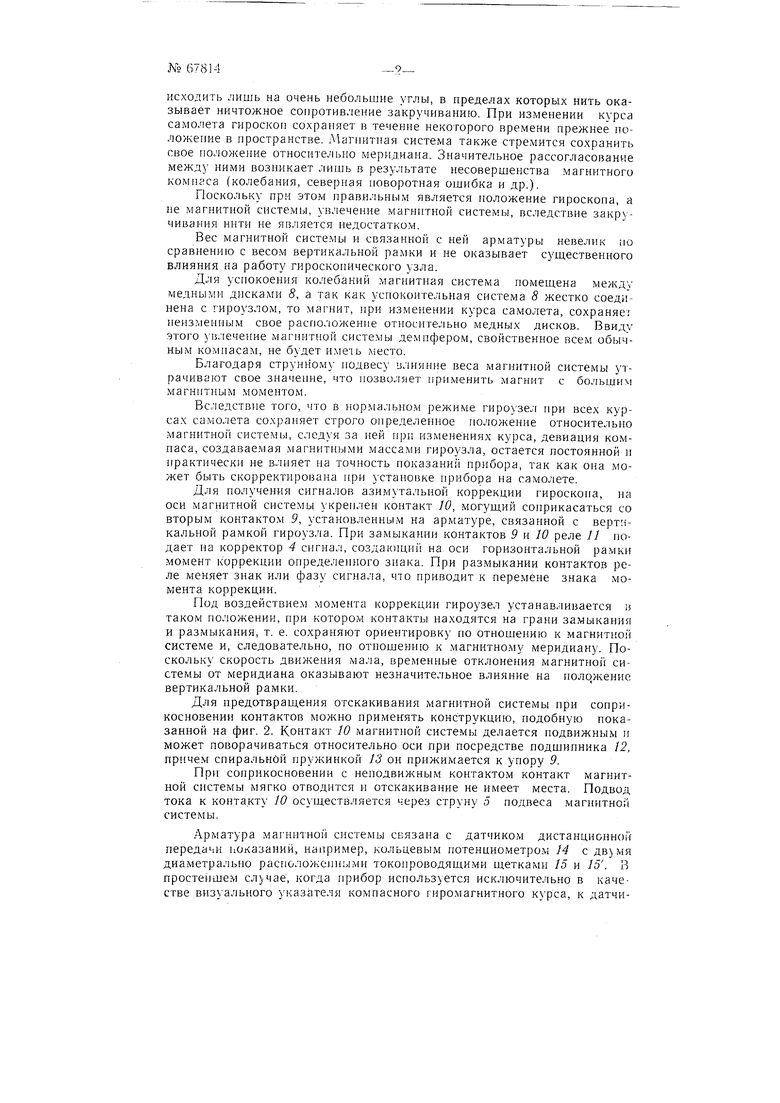
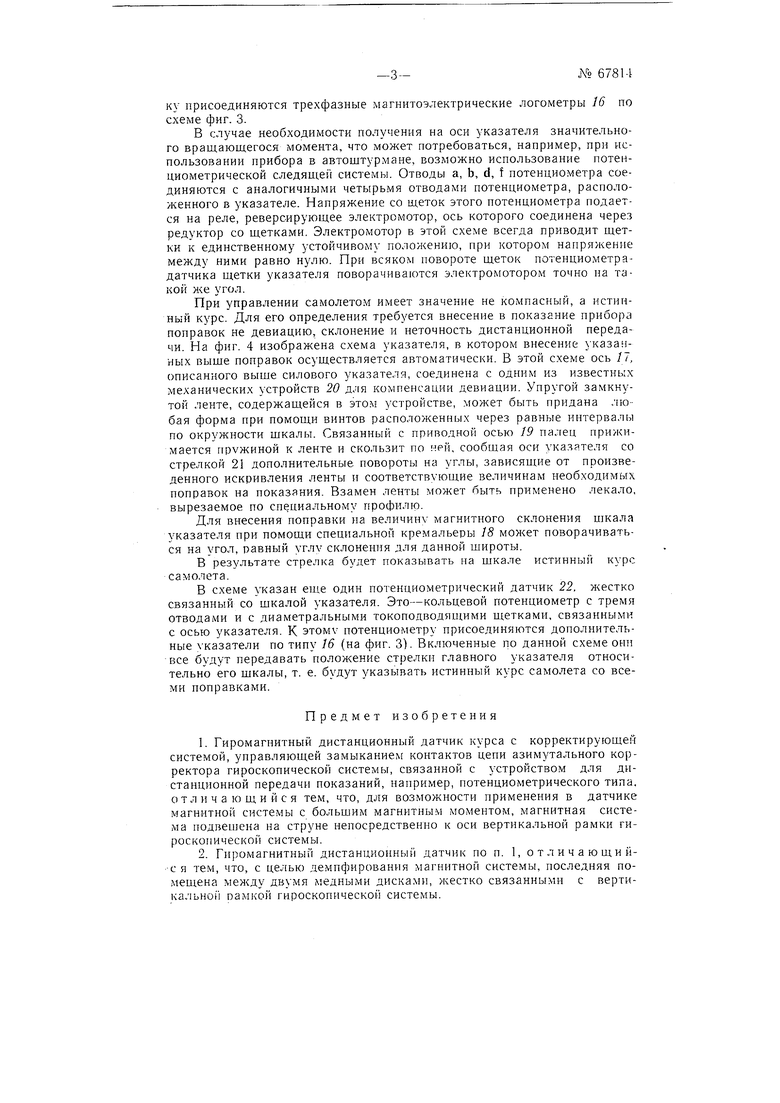
Ма фиг. 1 схематически изображеио нредложенное устройство, на фиг. 2-дана конструкция контактного приспособления, фиг. 3-дает схему соедииення дистанционного нередатч1 1 ;а, а фиг. 4-схему догтолиительного нрисиособления к дистанционному датчику.
Основной частью устройства является гнромотор / (фиг. 1), установленный в кардановом иодвесе 2, состоящем из горизонтальной 6 и вертикальной 7 рамок. Горизонтальный корректор 3, установленный в верхней части вертикальной рамки 7, какого-либо известного типа, например, выполнеииый в виде асинхронного двигателя, приводится от датчика, связанного с внутренней (горизонтальной) рамкой и срабатываюшего ири отклонении этой рамки от положения, нерпендикулярного пертнка:1ьной рамке.
К горизонтальной оси прикладывается усплие от аналогичного азимутального корректора 4. Электрический сигнал к этому корректору подается от снециального реле, управляемого от магнитной системы обычного компаса. Магнитная система последнего подвешена на струне 5 непосредственно к оси вертикальной рамки 7. В нормальных условиях гироузел и магнитная система компаса расиоложены относительно друг строго оиределенным образо.м. Закручивание струны может проN° 67814- -
исходить лишь на очень небольшие углы, в пределах которых нить оказывает ничтожное сопротивление закручиванию. При изменении курса самолета гироскоп сохраняет в течение некоторого времени прежнее положение в пространстве. Магнитная система также стремится сохранить свое положение относительно меридиана. Значительное рассогласование между ними возникает лишь в результате несовершенства магнитного компаса (колебания, северная новоротная ошибка и др.).
Поскольку при этом правильным является положение гироскопа, а не магнитной системы, увлечение магнитной системы, вследствие закручивания ннти ие является недостатком.
Вес магнитной системы и связанной с ней арматуры невелик по сравнению с весом вертикальной рамки и не оказывает сушественного влияния на работу гироскопического узла.
Для успокоения колебаний магнитная система помеш,ена между медными дисками 8, а так как успокоительная система 5 жестко соединена с гироузлом, то магнит, при изменении курса самолета, сохраняе: неизменным свое расположение относительно медных дисков. Ввиду этого увлечение магнитной системы демпфером, свойственное всем обычным комнасам, не будет иметь место.
Благодаря струнному нодвесу илияние веса магнитной системы утрачивают свое значенне, что 11ОЗво;1яет применить магнит с большим магнитным .моментом.
Вс.чедствпе того, что в нормальном режиме гироузел при всех курсах самолета сохрапяет строго определенное положение относительно магнитной системы, следуя за ней при изменениях курса, девиация компаса, создаваемая магнитными массами гироузла, остается постоянной н фактически не влияет на точность показаний прибора, так как она может быть скорректирована при установке прибора на самолете.
Для получения сигналов азимутальной коррекции гироскопа, на оси магнитной системы укреплен контакт 10, могущий соприкасаться со вторым контактом 9, установленным на арматуре, связанной с вертикальной рамкой гироузла. При замыкании контактов 9 и 10 реле // подает на корректор 4 сигнал, создающий на оси горизонтальной рамки момент коррекции определе)1ного знака. При размыкании контактов реле меняет знак или фазу сигнала, что приводит к перемене знака момента коррекции.
Под воздействием момента коррекции гироузел устанавливается и таком положении, при котором контакты находятся на грани замыкания и размыкания, т. е. сохраняют ориегггировку по отношению к магнитной системе и, следовательно, но отношенню к магнитному меридиану. Поскольку скорость движения мала, временные отклонения магнитной системы от меридиана оказывают незначительное влияние на пололсение вертикальной рамки.
Для предотвращения отскакивания магнитной системы при соприкосновении контактов можно применять конструкцию, подобную показанной на фиг. 2. Контакт 10 магнитной системы делается подвижным и может поворачиваться относительно оси при посредстве подшипника 12, причем спиральной прул инкой 13 он прижимается к упору 9.
При соприкосновении с неподвижным контактом контакт магнитной системы мягко отводится и отскакивание не имеет места. Подвод тока к контакту 10 осушествляется через струну 5 подвеса маг 1итной системы.
Арматура магнитной системы связана с датчиком дистанционной передачи показаний, например, кольцевым потенциометром 14 диаметрально расположепны.ми токопроводящи.ми щетками 15 и /5. В простейшем случае, когда прибор используется исключительно в качестве визуального указателя компасного гиромагнитного курса, к датчику присоединяются трехфазные магнитоэлектрические логометры 16 по схеме фиг. 3.
В случае необходи1мости получения на оси указателя значительного вращающегося момента, что может потребоваться, например, при использовании прибора в автощтурмане, возможно использование потенциометрической следящей системы. Отводы а, Ь, d, f потенциометра соединяются с аналогичными четырьмя отводами потенциометра, расположенного в указателе. Напряжение со щеток этого потенциометра подается на реле, реверсирующее электромотор, ось которого соединена через редуктор со щетками. Электромотор в этой схеме всегда приводит щетки к единственному устойчивому положению, при котором напряжение между ними равно нулю. При всяком повороте щеток потенциометрадатчика щетки указателя поворачиваются электромотором точно на такой же угол.
При управлении самолетом имеет значение не компасный, а истинный курс. Для его определения требуется внесение в показание прибора поправок не девиацию, склонение и неточность дистанционной передачи. На фиг. 4 изображена схема указателя, в котором внесение указанных выще поправок осуществляется автоматически. В этой схеме ось 17, описанного выще силового указателя, соединена с одним из известных механических устройств 20 для компенсации девиации. Упругой замкнутой ленте, содержащейся в этом устройстве, может быть придана любая форма при помощи винтов расположенных через равные интервалы по окружности щкалы. Связанный с приводной осью 19 палец прижимается пружиной к ленте и скользит по ней, сообщая оси указателя со стрелкой 21 дополнительные повороты на углы, зависящие от произведенного искривления ленты и соответствуюп ие величинам необходимых поправок на показания. Взамен ленты может быть применено лекало, вырезаемое по специальному профилю.
Для внесения поправки на величину магнитного склонения шкала указателя при помощи специальной кремальеры 18 может поворачиваться на угол, равный углу склонения для данной широты.
В результате стрелка будет показывать на щкале истинный курс самолета.
В схеме указан еще один потенциометрический датчик 22, жестко связанный со щкалой указателя. Это-кольцевой потенциометр с тремя отводами и с диаметральными токоподводяплими щетками, связанными с осью указателя. К ЭТОМУ потенциометру присоединяются дополнительные указатели по типу 16 (на фиг. 3). Включенные по данной схеме они все будут передавать положение стрелки главного указателя относительно его щкалы, т. е. будут указывать истинный курс самолета со всеми иоправками.
Предмет изобретения
1.Гиромагнитный дистанционный датчик курса с корректирующей системой, управляющей замыканием контактов цепи азимутального KOJ)ректора гироскопической системы, связанной с устройством для дистанционной передачи показаний, например, потенциометрического типа, отличающийся тем, что, для возможности применения в датчике магнитной системы с больщим магнитны.м моментом, магнитная система подвешена на струне непосредственно к оси вертикальной рамки гироскопической системы.
2.Гиромагнитный дистанционныГ датчик по п. 1, отличающийс я тем, что, с целью демпфирования магнитной системы, последняя помещена между двумя медными дисками, жестко связанными с вертиKa,:ibHOi i оамкой гироскопической системы.
-3-jYo 67814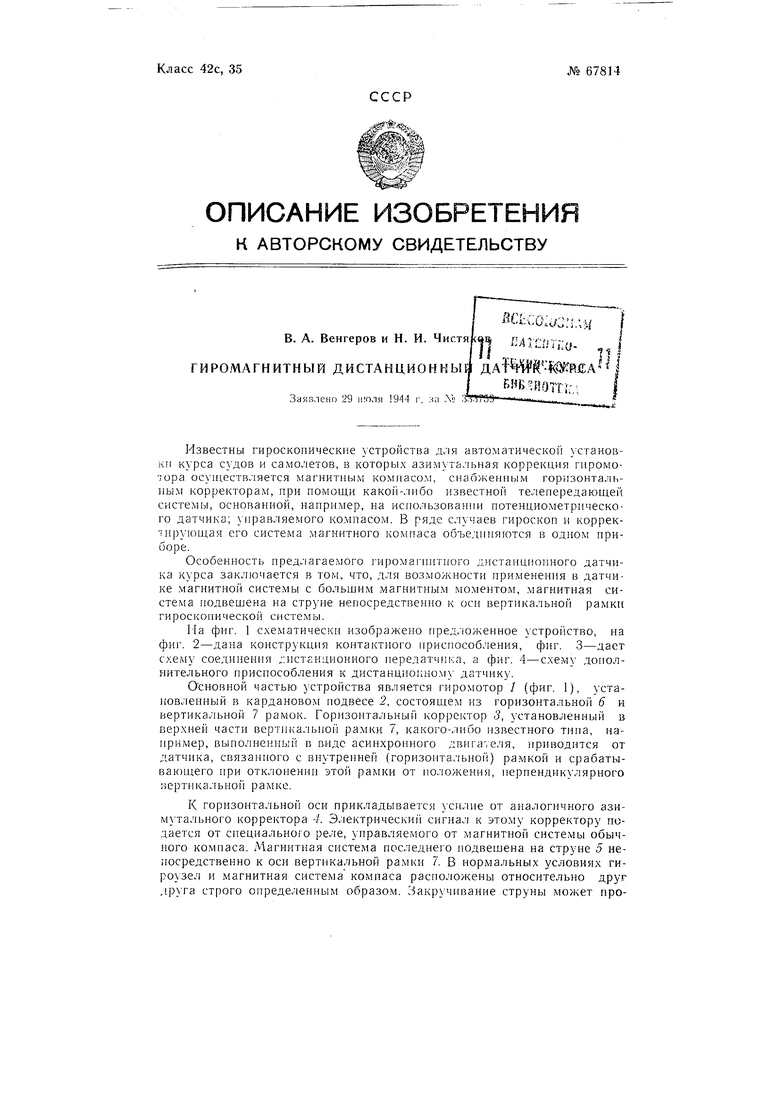
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для азимутальной коррекции гироскопа направления в автоматах курса от магнитного или т.п. компаса | 1943 |
|
SU67831A1 |
| Гирополукомпас с аналитической азимутальной коррекцией | 2023 |
|
RU2799738C1 |
| Устройство для получения сигнала электрической коррекции автомата курса | 1944 |
|
SU66795A1 |
| Гирополукомпас с компенсацией температурного дрейфа | 2024 |
|
RU2818661C1 |
| Датчик | 1943 |
|
SU66160A1 |
| Гироскопическое устройство | 1958 |
|
SU120343A1 |
| Гироскопический указатель азимута | 1961 |
|
SU146968A1 |
| Гирополукомпас | 2024 |
|
RU2826371C1 |
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |