Изобретение относится к пьезотехнике и может применяться в шаговых приводах устройств автоматики.
Известен пьезоэлектрический двигатель [Чесноков Г.А., Морозов В.П., Колесников Д.П. и др. Патент РФ 2061296 МПК 6 H02N 2/10], содержащий статор с осциллятором, выполненным в виде пьезоэлемента (плоское кольцо) с электродами и бандажом. Бандаж выполнен из отдельных дугообразных элементов с закрепленными на них толкателями, упруго прижатыми к цилиндрической рабочей поверхности пьезоэлемента. Недостаток устройства - малая величина углового шагового перемещения ротора.
Известен пьезодвигатель [Коваль.В.С., Лавриненко В.В. А.С. СССР 1807548 МПК H02N 2/00, H01L 41/09], содержащий коаксиально расположенные ротор и статор, кольцевой пьезоэлектрический осциллятор радиальных колебаний, упругие пластины-толкатели, прижатые одним концом к боковой поверхности ротора, а другим концом закрепленные в радиальных пазах звукоизолирующего кольца, свободно установленного относительно осциллятора и прижатого к нему с помощью пружинящей прокладки. Недостаток устройства - малая величина углового шагового перемещения.
Наиболее близким по составу и сущности к заявляемому является пьезоэлектрический двигатель [Коваль.В.С., Лавриненко В.В., Левицкий О.В. А.С. СССР 1820820 МПК H02N 2/00, H01L 41/09]. Двигатель содержит коаксиально расположенные ротор и статор, кольцевой пьезоэлектрический осциллятор радиальных колебаний и упругие пластины-толкатели, закрепленные одним концом на цилиндрической поверхности пьезоэлектрического осциллятора, а другим концом прижатые к боковой поверхности ротора. Недостаток устройства - малая величина углового шагового перемещения.
Задачей изобретения является увеличение углового шагового перемещения и расширение функциональных возможностей.
Задача решается тем, что используемое в устройстве-прототипе пьезокольцо, осуществляющее радиальные перемещения, заменено на трехкоординатный осциллятор - пьезотрубку, совершающую значительно большие по величине изгибные перемещения. Жесткое консольное закрепление пьезотрубки позволяет работать в квазистатическом режиме и осуществлять контролируемое перемещение свободного конца пьезотрубки, обеспечивающее оптимальную траекторию движения контактной точки толкатель-ротор.
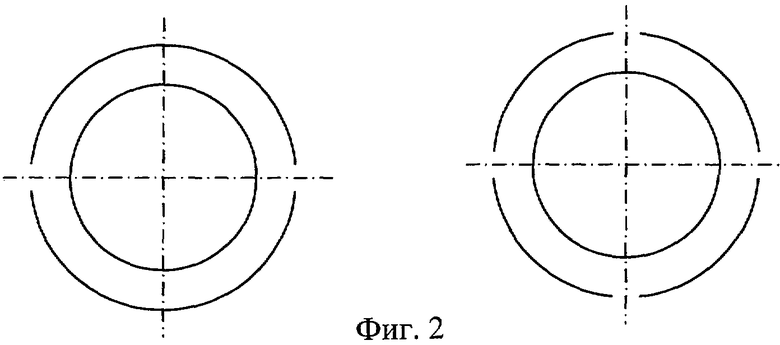
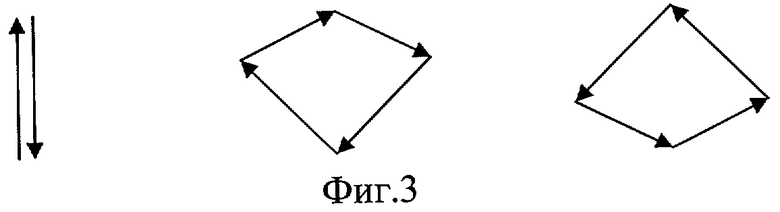
На фиг.1 представлена схема устройства, на фиг.2 - поперечное сечение электродов пьезоэлектрического осциллятора, на фиг.3 - траектории движения центральной точки незакрепленного конца пьезоэлектрического осциллятора.
Устройство содержит (фиг.1) ротор 1, статор 2, в котором монтируются подшипники 3. Пьезоэлектрический осциллятор 5, выполненный в виде радиально поляризованной пьезотрубки, консольно закрепляется на статоре, например, с помощью звукоизолирующей прокладки 4. На цилиндрической поверхности пьезоэлектрического осциллятора 5 установлены пластины-толкатели 6. Для повышения мощности двигателя может устанавливаться несколько групп пластин-толкателей. Вал 7 соединен с ротором и установлен в подшипниках 3.
Для возбуждения деформаций изгиба пьезоэлектрического осциллятора 5 один из его цилиндрических электродов, либо внутренний, либо внешний, разделяется (по образующей цилиндра) на несколько секций. Например, на фиг.2 представлены варианты разделения внешнего электрода на 2 и 4 секции. Напряжение на секции подается относительно сплошного внутреннего электрода. Напряжение в зависимости от направления изгиба может подаваться либо на одну, либо сразу на две секции. При этом изменяя напряжения на секциях, можно реализовать различные варианты движения центральной точки незакрепленного конца изгибаемой пьезотрубки (фиг.3). Движение незакрепленного конца пьезоэлектрического осциллятора осуществляется в плоскости, перпендикулярной оси ротора.
Устройство работает следующим. При подаче напряжения на электроды пьезоэлектрического осциллятора 5 происходит деформация изгиба. При этом пластины-толкатели 6, направленные в сторону изгиба, перемещаясь в радиальном направлении, прижимаются к цилиндрической поверхности ротора 1, затем несколько изгибаются и сообщают (посредством сил трения) ротору 1 вращающийся момент. После уменьшения напряжения до нуля трубка принимает исходное недеформированное состояние, позволяя толкателям 6 возвратиться в исходное состояние. Для изменения направления вращения ротора осуществляют деформацию пьезоэлектрического осциллятора 5 в противоположном направлении.
Для удобства замены пластин-толкателей 6 они могут свободно устанавливаться одним концом в радиальных пазах на цилиндрической поверхности кольца, жестко закрепленного на поверхности пьезоэлектрического осциллятора 5. В данном случае можно просто заменить комплект пластин-толкателей.
Другой вариант крепления пластин толкателей - неразъемное закрепление одним концом в радиальных пазах на цилиндрической поверхности кольца, соединяемого, например, с помощью резьбового соединения с другим кольцом, жестко закрепленным на поверхности пьезоэлектрического осциллятора 5. В данном случае выполняют замену кольца и толкателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОДВИГАТЕЛЬ | 2008 |
|
RU2376697C1 |
| ПЬЕЗОДВИГАТЕЛЬ | 2018 |
|
RU2686091C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1990 |
|
RU2017314C1 |
| Пьезоэлектрический двигатель | 1990 |
|
SU1831760A3 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2061296C1 |
| Пьезоэлектрический двигатель | 1991 |
|
SU1807548A1 |
| РЕВЕРСИВНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2062545C1 |
| Пьезоэлектрический двигатель | 1974 |
|
SU1278994A1 |
| Вращательный пьезоэлектрический двигатель | 2015 |
|
RU2621712C2 |
| РЕВЕРСИВНЫЙ ЭЛЕКТРОСТАТИЧЕСКИЙ МИКРОДВИГАТЕЛЬ ВРАЩЕНИЯ | 2012 |
|
RU2513030C2 |
Пьезодвигатель предназначен для использования в шаговых приводах устройств автоматики для высокоточного позиционирования образцов и зондов. Пьезодвигатель содержит коаксиально расположенные ротор и статор, на статоре посредством звукоизолирующей прокладки установлен пьезоэлектрический осциллятор, выполненный в виде радиально поляризованной пьезотрубки; на цилиндрической поверхности пьезотрубки установлены пластины-толкатели, вал соединен с ротором и установлен в подшипниках; при этом пьезоэлектрический осциллятор закреплен консольно, а вторые концы пластин-толкателей соединены с его цилиндрической поверхностью. Изобретение обеспечивает расширение функциональных возможностей и увеличение углового шагового перемещения. 3 ил.
Пьезодвигатель, содержащий коаксиально расположенные ротор и статор, пьезоэлектрический осциллятор, установленный на статоре, упругие пластины-толкатели, прижатые одним концом к боковой поверхности ротора, отличающийся тем, что пьезоэлектрический осциллятор выполнен в виде пьезоэлектрической трубки, при этом пьезоэлектрический осциллятор закреплен консольно, второй конец пластин-толкателей соединен с цилиндрической поверхностью пьезоэлектрического осциллятора.
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1990 |
|
RU2017314C1 |
| УСТРОЙСТВО МИКРОПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2272350C1 |
| УСТРОЙСТВО ДЛЯ МИКРОПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2004 |
|
RU2247467C1 |
| УСТРОЙСТВО ДЛЯ МИКРОПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2004 |
|
RU2257645C1 |

