Предлагаемое устройство относится к микроэлектромеханическим системам (МЭМС), в частности к микромеханическим устройствам с подвижными, деформируемыми элементами. Может использоваться для построения микро- нанопозиционеров, микросистем передвижения и транспортировки различного назначения, осуществляющих перемещения в микро- и наноразмерной шкале масштабов, а также двигателей, обладающих микроразмерами, в роботехнике, в том числе микророботехнических системах медицинского назначения.
Известен шаговый линейный электростатический двигатель (патент США №580383, Intern'l Class: H02K 41/00, опубл. 16.10.1997), состоящий из плоского статора, имеющего емкостную структуру, сформированную металлическим слоем и слоем диэлектрического материала, подвижным ротором, совершающего поступательное движение, посредством группой проводящих деформируемых лепестков, формирующих контакт со слоем диэлектрического материала статора путем наката. Подвижная часть двигателя параллельна и отделена от статора. Недостатком этого двигателя является наличие значительных потерь на трение направляющих о слой диэлектрического материала статора, а также износ этого материала.
Известен электростатический микро-, нанодвигатель (патент РФ №2374746, МПК H02N 1/00, опубл. 27.11.2009), содержащий источник питания, по крайней мере две пластины, расположенные друг относительно друга с зазором и с возможностью изменения за счет электростатического воздействия их пространственной ориентации друг относительно друга. Недостатком такого микро-, нанодвигателя является малая точность и небольшое быстродействие при вращательном движении.
Известен также электромеханизм (патент РФ №95323, МПК В81В 3/00, опубл. 27.06.2010), состоящий из корпуса полимерного материла, имеющего форму прямоугольного параллелепипеда, на дне которого закреплена металлическая подложка, на подложку нанесен слой диэлектрика с высоким значением относительной диэлектрической проницаемости, электрод выполнен изогнутым U-образным, наружная поверхность выполнена с возможностью соприкосновения со слоем диэлектрика. Прямоугольные в плане поверхности электроды выполнены с возможностью соприкосновения с внутренней верхней поверхностью корпуса и подключены к системе питания и управления, которая соединена с металлической подложкой. Недостатком этого электромеханизма является малая мощность, отсутствие возможности перемещения, вращения, что приводит к невозможности использования его в системах передвижения и транспортировки, осуществляемых в микроразмерной шкале измерений.
Наиболее близким, принятым за прототип, является электростатический двигатель с деформируемым лепестком между ротором и диэлектрическим слоем на статоре (патент США №5898254, Intern'l Class: H02N 1/00, опубл. 16.10.1997), представляющий емкостную структуру, образованную металлическим слоем и слоем диэлектрического материала, подвижным ротором, совершающего поступательное движение, посредством проводящего деформируемого лепестка, формирующего контакт со слоем диэлектрического материала статора путем наката. Слой диэлектрического материала обладает нелинейностью поляризации от напряженности электрического поля, предварительно нанесенный слой диэлектрика имеет высокое значение относительной диэлектрической проницаемости. Недостатком этого устройства является существенное трение от направляющих ротора и сильный износ слоя диэлектрического материала статора посредством направляющих.
Задачей изобретения является расширение функциональных возможностей быстродействующего высокоэнергоемкого реверсивного электростатического микродвигателя вращения за счет использования его в качестве углового шагового микро-, нанопозиционера, в одношаговом и квазиустановившемся вращательных режимах движения и уменьшение износа поверхности диэлектрической пленки, состоящей из диэлектрического материала высокой проницаемости.
Технический эффект, используемый при решении технической задачи, заключается в изменении электрической емкости конденсаторов, образованными микроактюаторами с гибкими проводящими электродами и проводящим слоем статора, за счет деформации гибких электродов, возникающей в результате наката электродов на поверхность статора, тем самым приводя во вращение ротор микродвигателя, у которого отсутствуют направляющие, соприкасающиеся с поверхностью диэлектрика, тем самым, уменьшая износ материала диэлектрической пленки. Указанный технический эффект достигается тем, что в известном реверсивном электростатическом микродвигателе вращения, содержащем источник питания и систему управления, датчик угловой скорости, ротор, приводится в движение системой микроактюаторов, согласно изобретению, часть ротора выполнена в виде плоского кольца, каждый из микроактюаторов, расположенный на нижней плоскости кольца ротора, включает в себя подвижный элемент с упруго связанными двумя гибкими электродами малой изгибной жесткости, на верхнюю плоскость кольца ротора нанесены проводящие слои, которые соединены с соответствующими гибкими электродами контактами, а статор выполнен состоящим из кремниевой подложки, на которую последовательно нанесены проводящий слой и диэлектрическая пленка высокой диэлектрической проницаемости.
По второму варианту реверсивный электростатический микродвигатель вращения, содержащий источник питания и систему управления, датчик угловой скорости, имеет ротор, приводимый в движение системой микроактюаторов, при этом часть ротора выполнена состоящей из трех плоских колец, на верхние плоскости колец ротора нанесены проводящие слои, от которых отводятся контакты к гибким электродам, а каждый из микроактюаторов расположен на нижних плоскостях трех колец ротора.
По третьему варианту реверсивный электростатический микродвигатель вращения, содержащий источник питания и систему управления, датчик угловой скорости, имеет ротор, при этом часть ротора выполнена состоящей из плоского кольца, на внешнюю и внутреннюю боковые грани кольца ротора нанесены проводящие слои, от которых отводятся контакты к гибким электродам, ротор приводится в движение системой микроактюаторов, которые расположены на верхних и нижних плоскостях кольца ротора.
По четвертому варианту реверсивный электростатический микродвигатель вращения, содержащий источник питания и систему управления, датчик угловой скорости, имеет ротор, при этом часть ротора выполнена состоящей из двух плоских колец, проводящие слои нанесены на внешние и внутренние боковые грани колец, от которых отводятся контакты к гибким электродам, ротор приводится в движение системой микроактюаторов, которые расположены на верхних и нижних плоскостях двух колец ротора.
Сущность изобретения поясняется нижеследующим описанием и прилагаемыми чертежами.
На фиг.1 изображена конструкция первого варианта реверсивного электростатического микродвигателя вращения при вращении с положительной угловой скоростью.
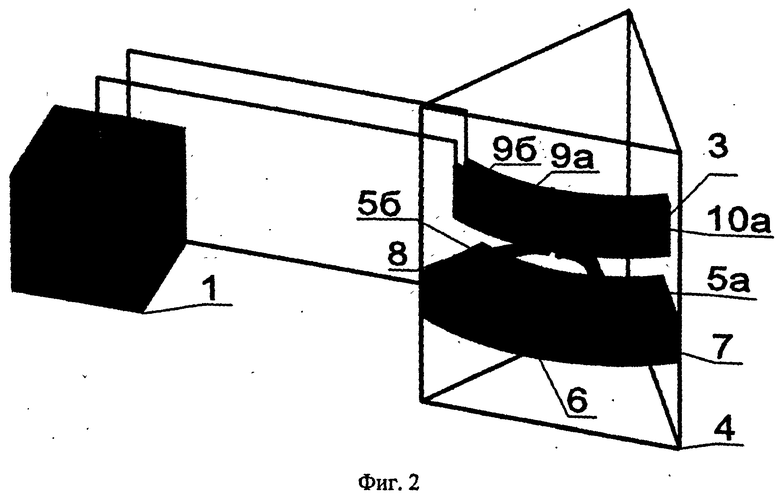
На фиг.2 представлена составная часть микродвигателя - микроактюатор.
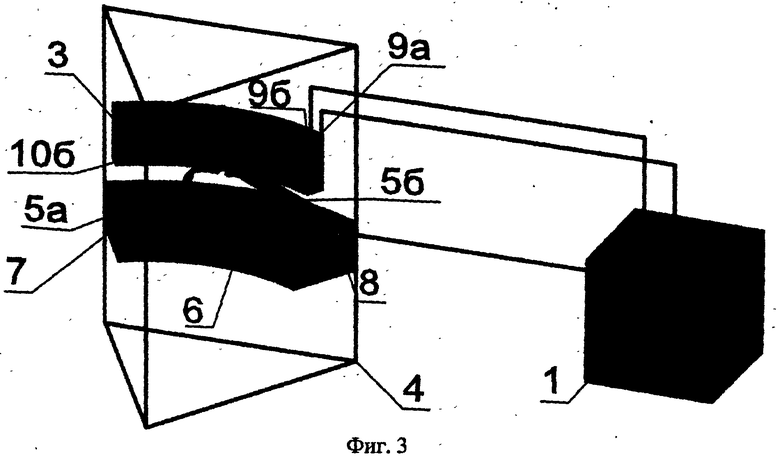
На фиг.3 изображен микроактюатор с противоположной стороны.
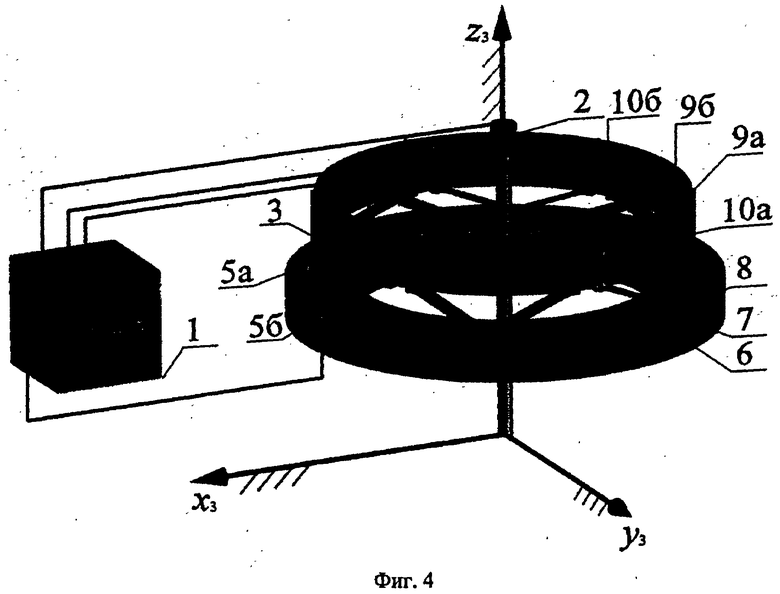
На фиг.4 показан реверсивный электростатический микродвигатель вращения в первом исполнении, когда гибкие электроды находятся в недеформируемом состоянии.
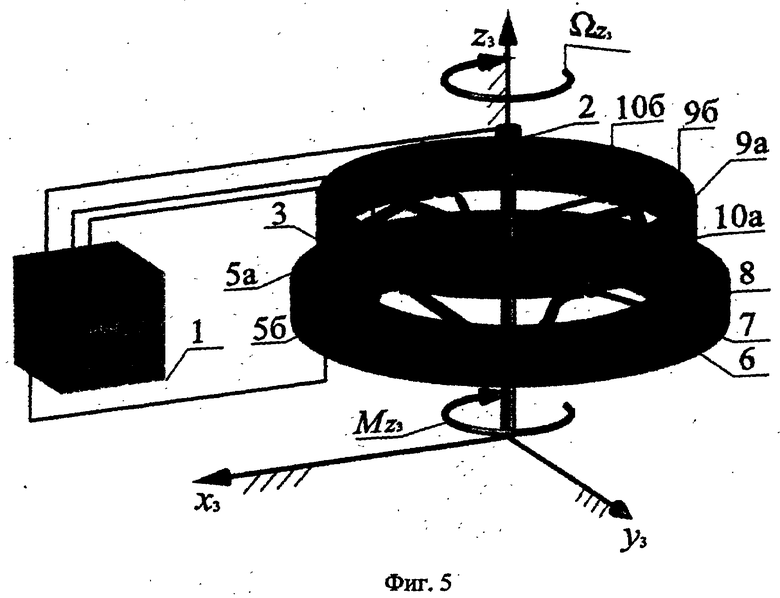
На фиг.5 представлен реверсивный электростатический микродвигатель вращения в первом исполнении при вращении с отрицательной угловой скоростью.
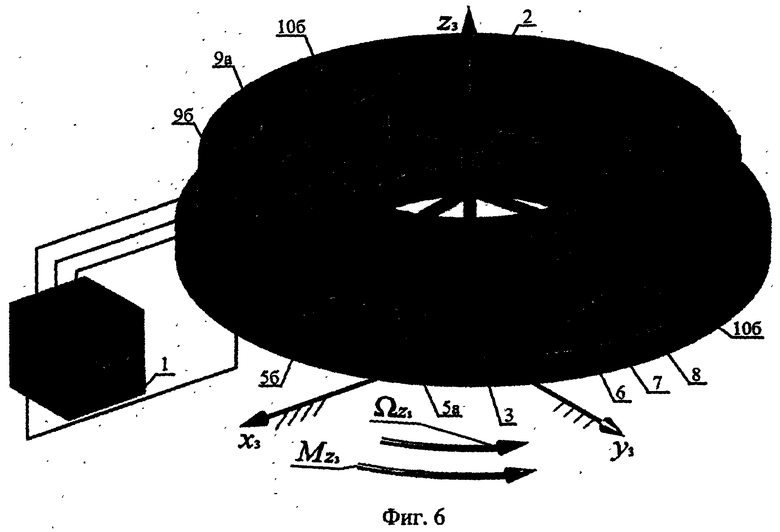
На фиг.6 изображен второй вариант реверсивного электростатического микродвигателя вращения при движении с положительной угловой скоростью.
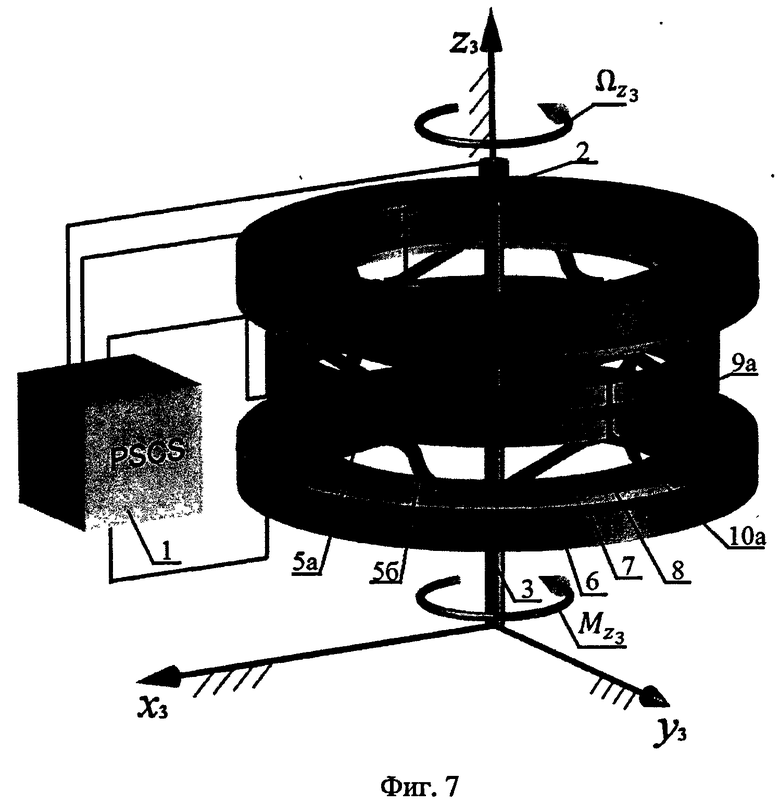
На фиг.7 показан реверсивный электростатический микродвигатель вращения в третьем исполнении при вращении с положительной угловой скоростью.
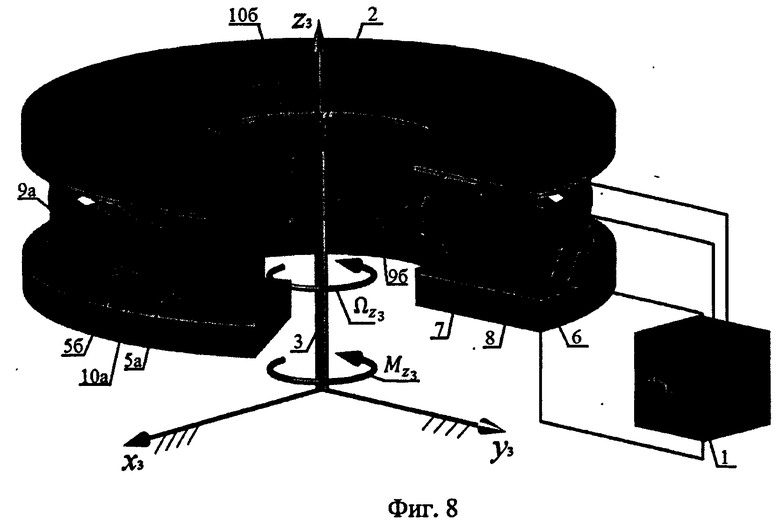
На фиг.8 приведена конструкция реверсивного электростатического микродвигателя вращения при движении с положительной угловой скоростью.
Реверсивный электростатический микродвигатель вращения (фиг.1), содержащий систему питания и систему управления (PSCS - power system and control system) 1, датчик угловой скорости 2, имеет ротор 3, приводимый в движение системой микроактюаторов 4. При этом каждый из микроактюаторов 4 расположен на нижней плоскости кольца ротора 3, и включает в себя подвижный элемент (часть ротора 3) (фиг.2) с упруго связанными двумя гибкими электродами (лепестками) 5а, 5б малой изгибной жесткости, кремниевую подложку - статор 6, на которую последовательно нанесены проводящий слой 7 и диэлектрическая пленка высокой диэлектрической проницаемости 8. На верхнюю плоскость кольца ротора нанесены проводящие слои 9а, 9б, которые соединены с соответствующими гибкими электродами 5а, 5б контактами 10а (показан на фиг.2), 10б (показан на фиг.3).
Гибкие электроды 5а, 5б и проводящий слой 7 образуют конденсаторы переменной емкости. Гибкие электроды 5а, 5б, например, могут выполняться из бериллиевой бронзы, в качестве диэлектрической пленки высокой диэлектрической проницаемости можно использовать сегнетоэлектрик ниобат бария стронция, модифицированного лантаном.
Другие варианты исполнения микродвигателя представлены на фиг.6 - фиг.8.
Во втором исполнении реверсивного электростатического микродвигателя (см. фиг.6) микроактюаторы 4 размещены на нижних плоскостях трех колец ротора, на верхние плоскости колец ротора нанесены проводящие слои 9а, 9б, от которых подводятся контакты к гибким электродам 5а, 5б. В третьем варианте реверсивного электростатического микродвигателя микроактюаторы 4 (см. фиг.7) расположены на нижней и верхней плоскостях кольца ротора, проводящие слои 9а, 9б нанесены на внешнюю и внутреннюю боковые грани кольца, от которых отводятся к гибким электродам 5а, 5б контакты 10а и 10б соответственно. В четвертом исполнении реверсивного электростатического микродвигателя (см. фиг.8) микроактюаторы 4 размещены на нижней и верхней плоскостях колец ротора соответственно, проводящие слои 9а, 9б нанесены на внешнюю и внутреннюю боковые грани каждого кольца, от которых отводятся к гибким электродам 5а, 5б контакты 10а, 10б соответственно.
Рассмотрим функционирование реверсивного микродвигателя вращения в различных режимах.
Исходное положение представлено первым вариантом двигателя на фиг.4 в неподвижной системе координат x3, y3, z3, в котором все гибкие электроды 5а и 5б находятся в недеформируемом состоянии.
В микроактюаторе 4 (фиг.2) на проводящие слои 7 и 9а подается разность потенциалов, таким образом, по контакту 10а к гибкому электроду 5а подводится ток, в результате возникает электростатическое давление, действие которого приводит к деформации гибкого электрода 5а, который незакрепленным краем накатывается на поверхность диэлектрической пленки 8, и образует неподвижный контакт, а закрепленным концом приводит в движение ротор 3. Каждый микроактюатор 4 создает момент, тем самым приводя во вращение ротор микродвигателя с моментом Mz3 и с положительной угловой скоростью Ωz3 относительно неподвижной системы координат x3, y3, z3, связанной со статором 6 (см. фиг.1, фиг.6 - фиг.8). При реверсивной работе микродвигателя, в каждом микроактюаторе 4 прикладывается разность потенциалов на проводящие слои 7 и 9б (фиг.3), тем самым подводится ток ко второму гибкому электроду 5б, в результате, приводится во вращение ротор с отрицательной угловой скоростью Ωz3 (фиг.5).
Одношаговый режим работы микродвигателя представляет вращательное движение ротора с угловой скоростью Ωz3 и моментом Mz3 относительно неподвижной системы координат x3, y3, z3 при единичном воздействии импульса напряжения на гибкие электроды 5а либо 5б микроактюаторов. Процесс разгона ротора осуществляется последовательной подачей импульсов напряжения на гибкие электроды 5а либо 5б микроактюаторов, необходимой продолжительностью и интервалами между ними. По мере движения ротор разгоняется и выходит на квазиустановившийся режим, при котором относительное изменение средней угловой скорости не превышает заданной величины. Разгон и квазиустановившийся режим могут выполняться с регулированием по максимальной скорости и без регулирования. Для выполнения с регулированием по максимальной угловой скорости используется датчик угловой скорости 2.
Режим работы микродвигателя в качестве углового шагового микро-, нанопозиционера представляет собой потактовое поочередное вращение ротора в двух поочередных направлениях при необходимой длительности импульсов и задержке между ними. Такой режим работы демонстрирует высокую прецизионность вращения ротора и воспроизводимость параметров углового шага. Величина шага зависит от массы нагрузки, от величины импульсов напряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОСТАТИЧЕСКИЙ ДВИГАТЕЛЬ | 1986 |
|
SU1452427A1 |
| МАШИНА ПОСТОЯННОГО ТОКА | 1999 |
|
RU2187191C2 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1998 |
|
RU2148788C1 |
| ЭЛЕКТРОСТАТИЧЕСКАЯ ЕМКОСТНАЯ МАШИНА ДЛЯ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ВЕТРОВОГО ПОТОКА | 2003 |
|
RU2241300C2 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 2015 |
|
RU2579156C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА ЕМКОСТНАЯ (ЭМЕ) ПЛАНАРНОГО ТИПА | 2016 |
|
RU2640194C1 |
| МИКРОСИСТЕМНОЕ УСТРОЙСТВО ТЕРМОРЕГУЛЯЦИИ ПОВЕРХНОСТИ КОСМИЧЕСКИХ АППАРАТОВ | 2012 |
|
RU2518258C1 |
| Вакуумметр | 1979 |
|
SU821978A2 |
| ШАГАЮЩИЙ РОБОТ-НАНОПОЗИЦИОНЕР И СПОСОБ УПРАВЛЕНИЯ ЕГО ПЕРЕДВИЖЕНИЕМ | 2010 |
|
RU2540283C2 |
| БИНАРНЫЙ КОСМИЧЕСКИЙ АППАРАТ С РЕКОНФИГУРИРУЕМОЙ СКАНИРУЮЩЕЙ АНТЕННОЙ, СОВМЕЩЕННОЙ С СОЛНЕЧНОЙ БАТАРЕЕЙ, РАЗВЕРТЫВАЕМОЙ МУЛЬТИВЕКТОРНЫМИ МАТРИЧНЫМИ РАКЕТНЫМИ ДВИГАТЕЛЯМИ | 2020 |
|
RU2745166C1 |
Изобретение относится к области электротехники и направлено на достижение технического результата, состоящего в повышении точности и расширении функциональных возможностей микроэлектромеханических систем за счет использования реверсивного микродвигателя вращения в качестве углового шагового микро-, нанопозиционера, реверсивного высокоэнергоемкого быстродействующего вращательного микропривода в шаговом и квазиустановившимся режимах. Указанный технический результат достигается за счет того, что реверсивный электростатический микродвигатель вращения, содержащий источник питания и систему управления, датчик угловой скорости, имеет ротор, который приводится в движение системой микроактюаторов, каждый из которых включает в себя подвижный элемент с упруго связанными двумя подвижными электродами малой изгибной жесткости, кремниевую подложку, на которую последовательно нанесены проводящий электрод и диэлектрическая пленка высокой диэлектрической проницаемости. Предусмотрены следующие варианты. Микроактюаторы расположены на нижней плоскости кольца ротора, на верхнюю плоскость кольца ротора нанесены проводящие слои, которые соединены с соответствующими подвижными электродами контактами. Микроактюаторы размещены на нижних плоскостях трех колец ротора, на верхние плоскости колец ротора нанесены проводящие слои, которые соединены с соответствующими подвижными электродами контактами. Микроактюаторы расположены на нижней и верхней плоскостях кольца ротора, проводящие слои нанесены на внешние и внутренние боковые грани кольца. Микроактюаторы размещены на нижних и верхних плоскостях двух колец ротора, а проводящие слои нанесены на внешние и внутренние боковые грани колец. 4 н.п. ф-лы, 8 ил.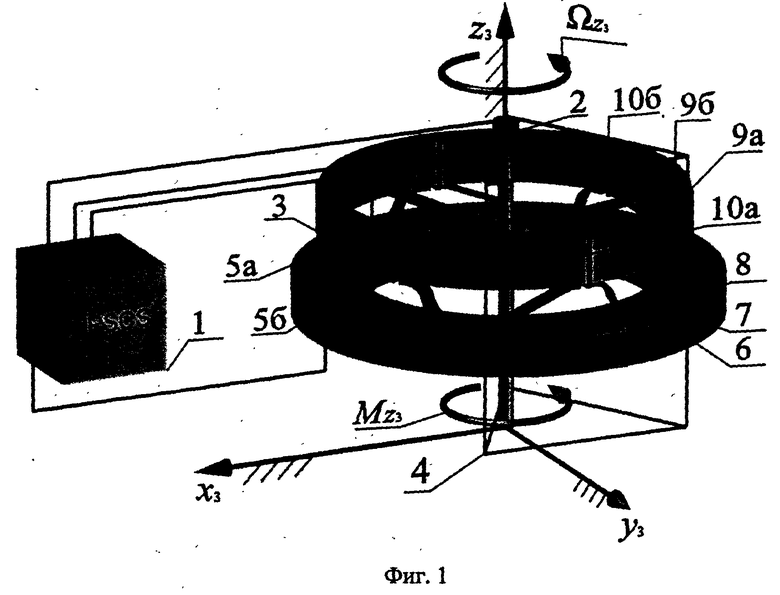
1. Реверсивный электростатический микродвигатель вращения, содержащий источник питания и систему управления, имеет ротор, приводимый в движение системой микроактюаторов, отличающийся тем, что часть ротора выполнена в виде плоского кольца, на верхнюю плоскость кольца ротора нанесены проводящие слои, от которых отводятся контакты к гибким электродам, статор выполнен состоящим из кремниевой подложки, на которую последовательно нанесены проводящий слой и диэлектрическая пленка высокой диэлектрической проницаемости, каждый из микроактюаторов расположен на нижней плоскости кольца ротора и включает в себя подвижный элемент с упруго связанными двумя гибкими электродами малой изгибной жесткости.
2. Реверсивный электростатический микродвигатель вращения, содержащий источник питания и систему управления, датчик угловой скорости, имеет ротор, приводимый в движение системой микроактюаторов, отличающийся тем, что часть ротора выполнена состоящей из трех плоских колец, а на верхние плоскости колец ротора нанесены проводящие слои, от которых отводятся контакты к гибким электродам, каждый из микроактюаторов расположен на нижних плоскостях трех колец ротора.
3. Реверсивный электростатический микродвигатель вращения, содержащий источник питания и систему управления, датчик угловой скорости, имеет ротор, приводимый в движение системой микроактюаторов, отличающийся тем, что часть ротора выполнена состоящей из плоского кольца, а на внешнюю и внутреннюю боковые грани кольца ротора нанесены проводящие слои, от которых отводятся контакты к гибким электродам, каждый из микроактюаторов расположен на нижних и верхних плоскостях кольца ротора.
4. Реверсивный электростатический микродвигатель вращения, содержащий источник питания и систему управления, датчик угловой скорости, имеет ротор, приводимый в движение системой микроактюаторов, отличающийся тем, что часть ротора выполнена состоящей из двух плоских колец, а на внешнюю и внутреннюю боковые грани колец ротора нанесены проводящие слои, от которых отводятся контакты к гибким электродам, каждый из микроактюаторов расположен на нижней и верхней плоскостях каждого кольца ротора.
| US 5898254 A, 16.10.1997 | |||
| Устройство для забрасывания породы в забут | 1951 |
|
SU95323A1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ МИКРО-, НАНОДВИГАТЕЛЬ | 2008 |
|
RU2374746C1 |
| RU 2004116754 A, 10.01.2006 | |||
| ЭЛЕКТРОСТАТИЧЕСКИЙ ДВИГАТЕЛЬ | 1986 |
|
SU1452427A1 |
| US 5235225 A, 10.08.1993 | |||
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2411533C1 |

