Изобретение относится к пьезотехнике и может применяться в шаговых приводах устройств автоматики для прецизионного позиционирования образцов и зондов.
Известен пьезоэлектрический двигатель [Чесноков Г.А., Морозов В.П., Колесников Д.П. и др. Патент РФ 2061296 МПК6 H02N 2/10], содержащий статор с осциллятором, выполненным в виде пьезоэлемента (плоское кольцо) с электродами и бандажом. Бандаж выполнен из отдельных дугообразных элементов с закрепленными на них толкателями, упруго прижатыми к цилиндрической рабочей поверхности пьезоэлемента. Недостаток устройства - работа в резонансном режиме, затрудненность пуска и работы под управлением одиночных импульсов.
Известен пьезодвигатель [Коваль. В.С., Лавриненко В.В. А.С. СССР 1807548 МПК H02N 2/00, H01L 41/09], содержащий коаксиально расположенные ротор и статор, кольцевой пьезоэлектрический осциллятор радиальных колебаний, упругие пластины-толкатели, прижатые одним концом к боковой поверхности ротора, а другим концом закрепленные в радиальных пазах звукоизолирующего кольца, свободно установленного относительно осциллятора и прижатое к нему с помощью пружинящей прокладки. Недостаток устройства - затрудненность пуска и работы под управлением одиночных импульсов.
Наиболее близким по составу и сущности к заявляемому является пьезоэлектрический двигатель [Гуляев П.В. Патент РФ 2376697 МПК Н02N 2/00, H01L 41/09]. Пьезодвигатель, содержащий коаксиально расположенные статор и вал, узел вращения, установленный между статором и валом, пьезоэлемент, один конец которого соединен с валом, другой конец - свободен и снабжен грузом. Недостаток устройства - необходимость применения высокого напряжения для деформации пьезоэлемента, затрудненность пуска после продолжительных простоев. Затрудненность запуска вызвана следующим. При работе узла вращения, один или оба элемента которого выполнены из пластмассы, возникает существенная разность между коэффициентами трения покоя и скольжения (до 4 раз в динамике и до 10 раз при длительном покое кинематической пары [Башта Т.М., Зайченко И.З., Ермаков В.В., Хаймович Е.М.. Объемные гидравлические приводы. М. Машиностроение. - 1969 - 628 С. - с. 113]). Это обусловлено тем, что предварительное смещение полимера (а также смазки при ее наличии) больше по сравнению с металлами, что вызывает разность между энергией необходимой для деформации и энергией, сохраняющейся в деформированном объеме [Конструкционные свойства пластмасс / Под ред. Бэра Э. М.: Химия, 1967. 464 с.]. Кроме того, при возрастании продолжительности неподвижного контакта кинематических элементов привода увеличивается коэффициент трения покоя [Крагельский И.В., Виноградова И.Э. Коэффициенты трения. М.: Государственное научно-техническое издательство машиностроительной литературы. 1962. 220 с.], что также осложняет пуск двигателя запуске и может привести к необходимости повышения амплитуды управляющих сигналов.
Задачей изобретения является обеспечение гарантированного пуска пьезодвигателя под управлением одиночных импульсов.
Задача решается тем, что на вращающемся валу помимо пьезоэлемента дополнительно закреплен держатель, на свободных концах пьезоэлемента и держателя установлены первый и второй элементы магнитной цепи, образующие магнитную цепь с зазором.
Изобретательский уровень обеспечивается тем, что новая совокупность существенных признаков, образовавшаяся после введения держателя и двух элементов магнитной цепи, позволяет за счет дополнительного электромагнитного взаимодействия гарантированно запустить пьезодвигатель, в том числе после длительного простоя.
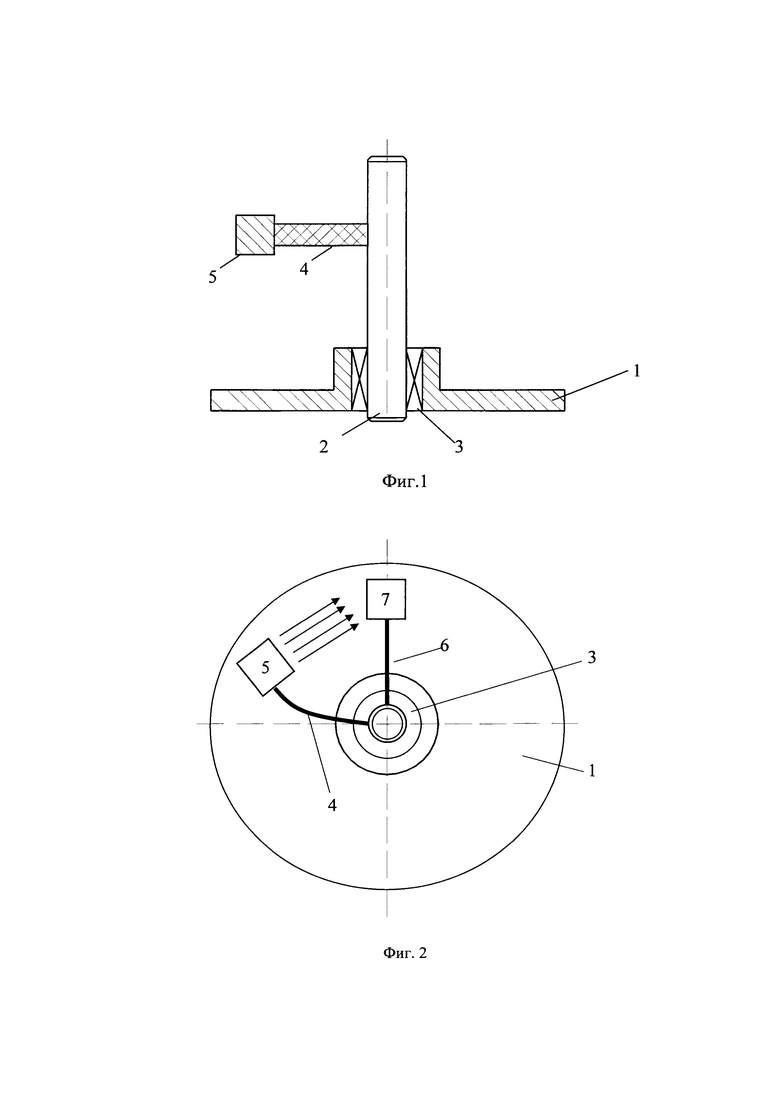
На фиг. 1, 2 представлены схемы устройства.
Устройство содержит (фиг. 1, 2) статор 1, вал 2, между которыми установлен узел вращения 3. На свободном конце пьезоэлемента 4 закреплен первый элемент магнитной цепи 5, выполняющий также роль инерционного груза. Другой конец пьезоэлемента 4 соединен с валом 2. С валом 2 также соединен держатель 6 с размещенным на ним вторым элементом 7 магнитной цепи, образующим с элементом 5 магнитную цепь с зазором.
Пьезоэлемент 4 предназначен для осуществления деформации изгиба и выполняется соответственно в виде биморфного пьезоэлемента. Первый 5 и второй 7 элементы выполнены из магнитных материалов в виде постоянных магнитов.
Существует также вариант, в котором первый элемент 5 магнитной цепи выполнен из магнитного материала, а второй элемент 7 - выполнен в виде катушки.
Существует также вариант, в котором первый элемент 5 магнитной цепи выполнен в виде катушки, а второй элемент 7 выполнен из магнитного материала.
Устройство работает следующим образом. На электроды пьезоэлемента 4 подается несимметричный пилообразный управляющий сигнал. Во время пологого фронта управляющего сигнала происходит деформация пьезоэлемента 4 и медленное смещение элемента 5 (фиг. 2). Эта составляющая деформации компенсируется пьезоэлектрическими силами, поэтому статор 1 и вал 2 находятся в состоянии относительного покоя. Кроме того, в процессе смещения элемента 5 он вступает в электромагнитное взаимодействие с элементом 7, что вызывает дополнительную деформацию пьезоэлемента. Начальное положение пьезоэлемента 4 и держателя 6 и соответственно расстояние между элементами 5,7 настраивается таким образом, чтобы сила электромагнитного взаимодействия вызывала дополнительную деформацию только в конце формирования фронта управляющего сигнала и не превышала силу трения покоя в узле вращения 3, а вал 2 не проворачивался относительно статора 1 до формирования среза (условие покоя узла вращения). Результирующая деформация пьезоэлемента 4 при этом будет вызвана в основном пьезоэффектом (на 80-90%) и в меньшей степени электромагнитным взаимодействием (на 10-20%). При формировании крутого среза управляющего сигнала пьезоэлектрические силы, частично компенсирующие силы упругой деформации пьезоэлемента 4, становятся равными нулю. За счет преобладания пьезоэлектрических сил над электромагнитными элементы магнитной цепи почти сразу отдаляются, электромагнитное взаимодействие элементов 5 и 7 резко уменьшается. Возникают некомпенсированные силы упругой деформации (повышенной), и, поскольку в силу инерционных свойств элемент 5 не может столь же быстро переместиться в исходную точку, то происходит проворачивание вала 2 в узле вращения 3.
При выполнении элементов 5 и 7 в виде постоянных магнитов сила электромагнитного взаимодействия между ними обратно пропорциональна четвертой степени расстояния между ними, что позволяет получить необходимое взаимодействие на максимально возможном удалении. Этот конструктивно наиболее простой вариант исполнения пьезодвигателя хорошо работает при больших деформациях пьезоэлемента 4 (доли-единицы мм).
При малых деформациях пьезоэлемента 4 сила электромагнитного взаимодействия между элементами изменяется в небольших пределах. В вариантах устройства, в которых один из элементов магнитной цепи изготавливается в виде катушки (например, соленоид), а другой из магнитного материала, появляется возможность управления током в катушке и электромагнитным взаимодействием в достаточно больших пределах. На время формирования фронта управляющего сигнала в катушку подается ток, обеспечивая взаимодействие элементов магнитной цепи, при формировании среза - ток отключается. Выполнение одного из элементов в виде управляемой катушки (соленоида) с током также значительно упрощает настройку взаимного положения элементов магнитной цепи, поскольку силу взаимодействия можно регулировать величиной тока. После пуска пьезодвигателя и выхода на рабочий режим электромагнитное взаимодействие элементов 5 и 7 можно полностью исключить.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОДВИГАТЕЛЬ | 2008 |
|
RU2376697C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ РЕВЕРСИВНЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2368061C1 |
| УСТРОЙСТВО ДЛЯ МИКРОПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2008 |
|
RU2359364C1 |
| Пьезоэлектрический двигатель | 1990 |
|
SU1831760A3 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1990 |
|
RU2017314C1 |
| ПЬЕЗОДВИГАТЕЛЬ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2008 |
|
RU2377703C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2061296C1 |
| РЕВЕРСИВНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2062545C1 |
| Вращательный пьезоэлектрический двигатель | 2015 |
|
RU2621712C2 |
| ПЬЕЗОУСТРОЙСТВО ПОШАГОВОГО ПЕРЕМЕЩЕНИЯ | 2012 |
|
RU2516258C1 |
Изобретение относится к электротехнике и может быть использовано в шаговых приводах устройств автоматики для высокоточного позиционирования образцов и зондов. Технический результат состоит в повышении надежности. Пьезодвигатель содержит пьезоэлемент, держатель, два элемента магнитной цепи, вал и статор, в котором монтируется узел трения. Пьезоэлемент и держатель закрепляются на валу одним концом, на другом конце пьезоэлемента и держателя расположены взаимодействующие друг с другом элементы магнитной цепи. 2 ил.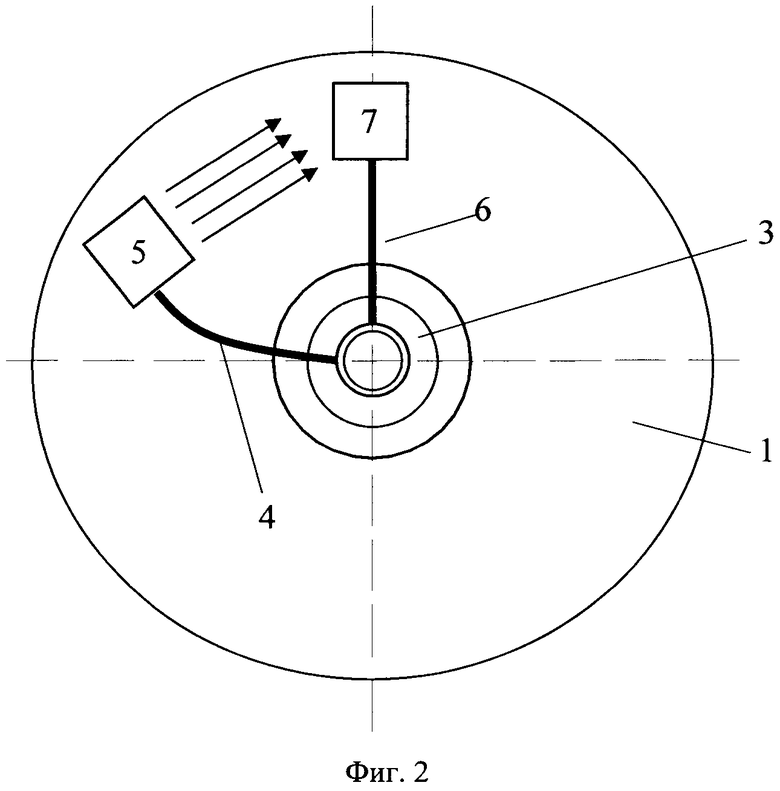
Пьезодвигатель, содержащий коаксиально расположенные статор и вал, узел вращения, установленный между статором и валом, пьезоэлемент, закрепленный на валу, и груз, установленный на свободном конце пьезоэлемента, отличающийся тем, что груз выполнен в виде первого магнитного элемента, в устройство дополнительно введены держатель, закрепленный на валу, и второй магнитный элемент, установленный на свободном конце держателя и взаимодействующий по магнитному полю с первым магнитным элементом, причем один или оба магнитных элемента выполнены в виде источника магнитного поля.
| ПЬЕЗОДВИГАТЕЛЬ | 2008 |
|
RU2376697C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1990 |
|
RU2017314C1 |
| Пьезоэлектрический двигатель | 1990 |
|
SU1831760A3 |
| US 4562374 A1, 31.12.1985. | |||

