Изобретение относится к области корабельной артиллерии и предназначено для использования на кораблях совместно с автоматическим прибором управления стрельбой артиллерийской установки.
Для управления стрельбой корабельных артиллерийских установок (АУ) до настоящего времени широко используются палубные визирные колонки (ВК) с механическим кольцевым прицелом, обеспечивающие дистанционное наведение АУ на сопровождаемую цель путем синхронного отслеживания приводами вертикального и горизонтального наведения АУ датчиков положения ВК по углу места и курсовому углу соответственно.
На оператора-наводчика ВК с кольцевым прицелом помимо задач визуального поиска, выбора и идентификации цели возложены функции:
- глазомерного определения дальности, курса и скорости сопровождаемой цели;
- выбор ракурсного кольца и точки визирования цели, определяющих углы упреждения АУ;
- удержания точки визирования цели на выбранном ракурсном кольце в условиях качки корабля.
С учетом указанных функций результативность стрельбы АУ при управлении от ВК существенно зависит от внешних условий и подготовки оператора.
В целях снижения влияния глазомерных операций на точность стрельбы от визирной колонки разработано «Прицельное устройство для управления огнем корабельной малокалиберной артустановки» (RU 2368859 C1), включающее палубную ВК, с установленным на ней лазерным биноклем-дальномером (ЛБД), и автоматический построитель углов упреждения АУ в процессе ручного сопровождения цели.
Однако, несмотря на инструментальное измерение дальности и автоматизацию выработки углов упреждения АУ, в указанном прицельном устройстве сохранилась зависимость точности наведения артиллерийской установки от качества ручного сопровождения цели, обусловленная синхронной связью АУ с визирной колонкой. Учитывая, что ошибки ручного сопровождения цели оператором-наводчиком возрастают в условиях качки корабля, успешное применение прицельного устройства продолжает существенно зависеть от человеческого фактора.
Устранение данного недостатка возможно только путем отказа от синхронной связи АУ с прицельным устройством с включением в контур наведения артиллерийской установки прибора управления стрельбой (ПУС) типа ПУС, используемых в корабельных радиолокационных и оптико-электронных системах автоматического управления АУ для выработки полных углов наведения по вертикали (ПУВН) и горизонту (ПУГН) артиллерийской установки с учетом качки и рыскания корабля.
Техническим результатом является устранение влияния на точность артиллерийской стрельбы ошибок ручного сопровождения цели, обусловленных физическими возможностями оператора-наводчика прицельного устройства, в особенности в реальных условиях качки и рыскания корабля, обеспечение выработки текущих координат сопровождаемой в ручном режиме цели в формате и с точностями, свойственными радиолокационным и оптико-электронным системам автоматического слежения, сопрягаемым с прибором управления стрельбой артиллерийской установки (ПУС АУ), за счет использования в визирно-дальномерном устройстве (ВДУ) предлагаемого способа уточнения текущих координат цели, сопровождаемой в ручном режиме.
Для достижения указанного результата предлагаемое визирно-дальномерное устройство содержит визирную колонку (ВК), состоящую из вращающейся части с установленным на ней датчиком положения ВК по курсовому углу (КУ) и качающейся части с установленными на ней лазерным биноклем-дальномером (ЛБД) и датчиком положения ВК по углу места (УМ). От известных в настоящее время устройств ВДУ отличается тем, что на качающейся части ВК установлена кнопка синхронизации (подачи команды на излучение лазера ЛБД), а в состав ВДУ введены электронный хронометр, фиксирующий моменты излучения лазерного дальномера ЛБД и измеряющий интервалы времени между последним и предыдущим моментом измерения дальности, и последовательно соединенные блок перевода отсчетов датчиков положения ВК по УМ и КУ в стабилизированную сферическую систему координат, селектор формирования дискретных значений стабилизированных координат УМ и КУ цели в моменты измерения дальности D до цели, преобразователь дискретных значений стабилизированных сферических координат D, УМ и КУ цели в прямоугольную стабилизированную систему координат и экстраполятор, обеспечивающий запоминание и экстраполяцию дискретных декартовых координат цели для использования их в ПУС АУ. При этом ЛБД соединен по входу с кнопкой синхронизации (подачи команды на излучение лазера ЛБД), а по выходу - с входом преобразователя дискретных значений стабилизированных сферических координат D, УМ и КУ цели в прямоугольную стабилизированную систему координат. Другие два входа преобразователя соединены с выходами селектора формирования дискретных значений УМ и КУ в моменты измерения дальности до цели, два сигнальных входа которого соединены с выходами блока перевода отсчетов датчиков положения ВК по УМ и КУ в стабилизированную сферическую систему координат, а хронирующий вход селектора соединен с кнопкой синхронизации (подачи команды на излучение лазера ЛБД), соединенной также с входом электронного хронометра. Блок перевода отсчетов датчиков положения ВК по УМ и КУ в стабилизированную сферическую систему координат соединен по входам с соответствующими датчиками ВК, а по входам сигналов бортовой, килевой качки и курса корабля - с корабельной системой гиростабилизации (СГС). Выходы преобразователя дискретных значений стабилизированных сферических координат D, УМ и КУ цели в прямоугольную стабилизированную систему координат X, Y, Н соединены с соответствующими тремя входами экстраполятора, хронирующий вход которого соединен с выходом электронного хронометра, а три выхода по сигналам экстраполированных декартовых координат цели - с входами прибора управления стрельбой ПУС АУ.
Реализованный в ВДУ способ уточнения текущих координат сопровождаемой в ручном режиме цели заключается в том, что в процессе ручного сопровождения цели в моменты точного совмещения линии визирования ВК с целью:
- измеряют дальность до цели и фиксируют соответствующий момент времени с помощью электронного хронометра;
- определяют мгновенные (дискретные) значения угла места и курсового угла цели в моменты измерения дальности;
- преобразовывают дискретные значения сферических координат цели в декартовы координаты цели в прямоугольной стабилизированной системе координат и запоминают их до следующего момента измерений;
- определяют интервал времени между последним и предыдущим моментами точного совмещения линии визирования ВК с целью;
- на основе изменения дискретных значений декартовых координат цели за интервал времени между двумя последовательными измерениями определяют составляющие скорости цели в прямоугольной стабилизированной системе координат;
- экстраполируют дискретные значения декартовых координат цели, соответствующие последнему моменту измерения;
- подают экстраполированные значения декартовых координат цели на соответствующие входы прибора управления стрельбой для использования их в качестве текущих координат сопровождаемой цели.
Как указано выше, практическое использование предлагаемого ВДУ связано с включением в контур наведения АУ прибора управления стрельбой типа ПУС, применяемого в корабельных радиолокационных и оптико-электронных системах автоматического управления артиллерийскими установками для выработки полных углов наведения (ПУВН, ПУГН) с учетом качки и рыскания корабля.
Примечание. Используемые в корабельных артсистемах ПУС представляют собой счетно-решающий прибор (вычислитель), обеспечивающий выработку полных углов наведения ПУВН, ПУГН артиллерийской установки на основе информации о текущих координатах цели, положении и параметрах движения корабля-носителя, размещении палубного поста и артиллерийской установки на корабле, метеобаллистических факторах, действующих во время стрельбы и др. В обеспечение своего функционирования ПУС использует уравнения внешней баллистики применяемых в АУ боеприпасов и сопрягается на корабле с радиолокационным или оптико-электронным средством автоматического сопровождения цели, корабельной системой гиростабилизации (СГС), корабельным ЛАГом, метеостанцией и другими обеспечивающими средствами.
Для снижения влияния человеческого фактора и обеспечения эффективного использования ПУС в составе контура наведения АУ на сопровождаемую в ручном режиме цель в ВДУ необходимо обеспечить независящую от ошибок ручного сопровождения выработку текущих координат сопровождаемой цели в требуемом для ПУС формате и с точностями, сопоставимыми с радиолокационной или оптико-электронной системой автоматического слежения.
Предлагаемое ВДУ включает в свой состав палубную визирную колонку с лазерным биноклем-дальномером, обслуживаемую оператором-наводчиком, и аппаратуру, обеспечивающую выработку и выдачу в ПУС достоверных текущих координат сопровождаемой цели в стабилизированной прямоугольной системе координат независимо от наличия ошибок ручного сопровождения.
В основу создания ВДУ положен тот факт, что в процессе ручного сопровождения цели со свойственными данному режиму ошибками, тем не менее, в эпизодические моменты времени t1, t2…tK… цели, когда оператору-наводчику удается достаточно точно совместить изображение наблюдаемой цели с перекрестием в поле зрения лазерного бинокля-дальномера (т.е. в моменты, обеспечивающие возможность измерения дальности DЦ(tK) до цели лазерным дальномером ЛБД), отсчеты датчиков положения ВК по углу места εВК(tK) и курсовому углу qВК(tK) с точностью до ширины узконаправленного луча лазерного дальномера соответствуют истинным значениям угла места εЦ(tK) и курсового угла qЦ(tK) цели, т.е.
εВК(tK)=εЦ(tK) qВК(tK)=qЦ(tK).
Учитывая, что значения εЦ(tK), qЦ(tK) и DЦ(tK) измеряются нерегулярно (в случайные моменты времени tK) и в нестабилизированной (палубной) сферической системе координат, задача сопряжения ВДУ с ПУС сводится к преобразованию этих дискретных (точных) значений координат цели в непрерывные стабилизированные декартовы координаты цели, используемые в ПУС для выработки ПУВН, ПУГН артиллерийской установки.
На чертеже представлена структурная схема построения и взаимодействия ВДУ с прибором управления стрельбой АУ, где обозначено:
1 - лазерный бинокль-дальномер (ЛБД) на качающейся части ВК;
2 - датчик положения ВК по углу места εВК(t);
3 - датчик положения ВК по курсовому углу qВК(t);
4 - кнопка синхронизации (подачи команды на излучение лазерного дальномера ЛБД);
5 - блок перевода отсчетов датчиков ВК по УМ и КУ (нестабилизированных координат εВК(t), qВК(t)) в стабилизированные координаты 

6 - селектор формирования дискретных значений стабилизированных сферических координат цели εЦ(tK), βЦ(tK) из непрерывных значений координат 
 датчиков визирной колонки;
датчиков визирной колонки;
7 - преобразователь дискретных значений стабилизированных сферических координат εЦ(tK), βЦ(tK) и DЦ(tK) цели в дискретные значения декартовых координат х(tK), y(tK), h(tK) в стабилизированной прямоугольной системе координат (ось Х соответствует направлению на север, Y - направлению на восток, а Н - в зенит);
8 - электронный хронометр, фиксирующий моменты времени излучения лазерного дальномера ЛБД и измеряющий интервал времени Δt между последним tk и предыдущим tk-1 моментами измерения дальности D(t);
9 - экстраполятор, обеспечивающий запоминание и преобразование дискретных значений декартовых координат х(tK), y(tK), h(tK) сопровождаемой цели в непрерывные координаты х(t), y(t), h(t) для использования в ПУС АУ;
ПУС АУ - прибор управления стрельбой артустановки;
СГС - корабельная система гиростабилизации;
АУ - артиллерийская установка с приводами вертикального и горизонтального наведения.
Функционирование ВДУ, реализующего способ определения текущих координат сопровождаемой в ручном режиме цели, осуществляется следующим образом.
Оператор-наводчик ВК после обнаружения и идентификации цели, пользуясь биноклем ЛБД 1, сопровождает выбранную цель по углам, пытаясь совместить ее изображение с перекрестием в поле зрения бинокля. При этом с датчиков угла места и курсового угла ВК текущие координаты εВК(t) и qВК(t) поступают на соответствующие входы блока 5 перевода отсчетов датчиков ВК по УМ и КУ (нестабилизированных координат εВК(t), qВК(t)) в стабилизированные координаты  На другие три входа указанного блока 5 поступают значения бортовой θ(t), килевой ψ(t) качек и курса своего Qc(t) корабля соответственно.
На другие три входа указанного блока 5 поступают значения бортовой θ(t), килевой ψ(t) качек и курса своего Qc(t) корабля соответственно.
Блок 5 с использованием приведенных ниже известных зависимостей (Л.Н.Преснухин, Л.А.Соломонов, В.Н.Четвериков, В.Ф.Шаньгин. «Основы теории и проектирования вычислительных приборов и машин управления», «Высшая школа», М., 1970) переводит нестабилизированные сферические координаты εВК(t), qВК(t) в стабилизированные 



где εВК - угол места ВК в сферической нестабилизированной системе координат;
qВК - курсовой угол ВК в сферической нестабилизированной системе координат;
 - угол места ВК в сферической стабилизированной системе координат;
- угол места ВК в сферической стабилизированной системе координат;
 - курсовой угол ВК в сферической стабилизированной системе координат;
- курсовой угол ВК в сферической стабилизированной системе координат;
 - азимут ВК в сферической стабилизированной системе координат;
- азимут ВК в сферической стабилизированной системе координат;
θ - угол бортовой качки;
ψ - угол килевой качки;
θС - курс свой корабля.
Стабилизированные сферические координаты  и
и  с выходов блока 5 поступают на входы временного селектора 6 формирования дискретных значений стабилизированных сферических координат цели εЦ(tK), βЦ(tK).
с выходов блока 5 поступают на входы временного селектора 6 формирования дискретных значений стабилизированных сферических координат цели εЦ(tK), βЦ(tK).
Осуществляя ручное сопровождение цели по углам, оператор-наводчик ВК в моменты совпадения изображения цели с перекрестием в поле зрения бинокля ЛБД 1 кратковременно нажимает кнопку 4 синхронизации (подачи команды на излучение лазерного дальномера ЛБД). При нажатии кнопки 4 лазерный дальномер ЛБД производит разовое измерение текущей наклонной дальности DЦ(tK). Одновременно импульсная команда на излучение лазерного дальномера с кнопки 4 поступает на входы селектора 6 и на запуск электронного хронометра 8. При поступлении импульсной команды с кнопки 4 на вход селектора 6 последний вырезает из поступивших на его входы непрерывных стабилизированных координат и дискретные значения координат цели εЦ(tK), βЦ(tK), поступающие далее на соответствующие входы преобразователя 7 дискретных значений стабилизированных сферических координат εЦ(tK), βЦ(tK) и DЦ(tK) цели в дискретные значения декартовых координат х(tK), y(tK), h(tK) в стабилизированной прямоугольной системе координат. При этом с выхода лазерного бинокля-дальномера 1 на третий вход преобразователя 7 приходит измеренное дискретное значение наклонной дальности DЦ(tK) до цели.
В преобразователе 7 с использованием приведенных ниже формульных зависимостей производится перевод дискретных значений стабилизированных сферических координат  DЦ(tK) в дискретные декартовы координаты хЦ(tK), yЦ(tK) и hц(tK) в стабилизированной прямоугольной системе координат.
DЦ(tK) в дискретные декартовы координаты хЦ(tK), yЦ(tK) и hц(tK) в стабилизированной прямоугольной системе координат.
dЦ(tK)=DЦ(tK)·cosεЦ(tK)
xЦ(tK)=dЦ(tK)·sinβЦ(tK)
yЦ(tK)=dЦ(tK)·cosβЦ(tK)
hЦ(tK)=DЦ(tK)·sinεЦ(tK),
где dЦ(tK) - дальность цели горизонтальная.
Полученные дискретные декартовы координаты цели с выхода преобразователя 7 поступают на соответствующие входы экстраполятора 9, на четвертый вход которого поступает значение интервала времени ΔtK между последним tK и предыдущим tK-1, моментами измерения дальности до цели.
В экстраполяторе 9 на основе поступивших на его входы и запомненных сигналов xЦ(tK), yЦ(tK), hЦ(tK) и ΔtK по приведенным ниже формульным зависимостям производятся вычисление составляющих скорости цели VX, VY, VH и выработка непрерывных (экстраполированных) координат цели хЦ(t), yЦ(t), hЦ(t), поступающих далее на соответствующие входы прибора управления стрельбой ПУС, вырабатывающего полные углы наведения АУ по вертикали (ПУВН) и горизонту (ПУГН)


x(t)=x(tK)+ νX·(t-tK)
y(t)=y(tK)+νY·(t-tK)
h(t)=h(tK)+νH·(t-tK)
Как следует из приведенного описания визирно-дальномерного устройства, сопряженного с ПУС, точность поступающих в ПУС текущих координат сопровождаемой ВК цели и, соответственно, точность выработки в ПУС полных углов наведения АУ не зависят от ошибок ручного сопровождения цели оператором-наводчиком ВК в интервалах между моментами излучения лазерного дальномера. Необходимым условием функционирования данной ВДУ является только обеспечение оператором-наводчиком ВК в процессе сопровождения цели двух или более моментов совмещения изображения цели с перекрестием в поле зрения бинокля ЛБД для дискретных измерений дальности и истинных угловых координат подлежащей обстрелу цели.
Литература
1. RU 2368859 C1, F41G 5/20, ОАО «КБ «Аметист», 14.02.2008, «Прицельное устройство для управления огнем корабельной малокалиберной артустановки».
2. Л.Н.Преснухин, Л.А.Соломонов, В.Н.Четвериков, В.Ф.Шаньгин. «Основы теории и проектирования вычислительных приборов и машин управления», изд. «Высшая школа», М., 1970.
3. RU 2192034 C1, G05D 3/12, ГУП «КБ приборостроения», 27.10.2002. «Система сопровождения».
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИЦЕЛЬНОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОГНЕМ КОРАБЕЛЬНОЙ МАЛОКАЛИБЕРНОЙ АРТУСТАНОВКИ | 2008 |
|
RU2368859C1 |
| СПОСОБ ВЫЯВЛЕНИЯ И КОМПЕНСАЦИИ ОШИБКИ ПРИЦЕЛИВАНИЯ В КОРАБЕЛЬНОМ АРТИЛЛЕРИЙСКОМ КОМПЛЕКСЕ | 2004 |
|
RU2265184C1 |
| КОРАБЕЛЬНЫЙ АРТИЛЛЕРИЙСКИЙ КОМПЛЕКС С РЕЖИМОМ КОМПЕНСАЦИИ ВЛИЯНИЯ ДЕФОРМАЦИЙ КОРПУСА КОРАБЛЯ | 2013 |
|
RU2542821C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ КОРАБЕЛЬНОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКОЙ | 2024 |
|
RU2828168C1 |
| УСТРОЙСТВО МОДЕЛИРОВАНИЯ ФУНКЦИОНИРОВАНИЯ КОРАБЕЛЬНОГО АРТИЛЛЕРИЙСКОГО КОМПЛЕКСА | 2008 |
|
RU2385817C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ ПО ДВИЖУЩЕЙСЯ ЦЕЛИ (ВАРИАНТЫ) | 2007 |
|
RU2347999C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АРТИЛЛЕРИЙСКИМ ОГНЕМ ПО ДВИЖУЩИМСЯ ЦЕЛЯМ | 1997 |
|
RU2134892C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМИ СНАРЯДАМИ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ ПО НЕСКОЛЬКИМ ЦЕЛЯМ | 2006 |
|
RU2317504C1 |
| Способ подсвета цели для обеспечения применения боеприпасов с лазерной полуактивной головкой самонаведения | 2021 |
|
RU2755134C1 |
| Способ пристрелки цели с использованием специального реактивного снаряда | 2019 |
|
RU2715466C1 |
Изобретение относится к области приборостроения и предназначено для применения на кораблях в качестве резервного средства сопровождения целей в составе радиолокационной или оптико-электронной системы управления стрельбой. Технический результат - расширение функциональных возможностей. Для достижения данного результата визирно-дальномерное устройство (ВДУ) ручного сопровождения целей содержит визирную колонку (ВК), состоящую из вращающейся части с установленным на ней датчиком положения ВК по курсовому углу (КУ) и качающейся части с установленными на ней лазерным биноклем-дальномером (ЛБД) и датчиком положения ВК по углу места (УМ). При этом на качающейся части ВК установлен элемент синхронизации ЛБД. В состав ВДУ введены электронный хронометр, блок перевода отсчетов датчиков положения ВК по УМ и КУ в стабилизированную сферическую систему координат и элементы, обеспечивающие запоминание и экстраполяцию позиций цели. 2 н.п. ф-лы, 1 ил.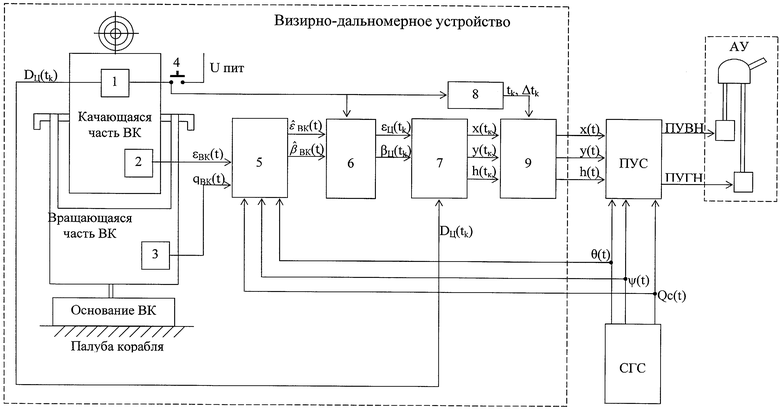
1. Визирно-дальномерное устройство (ВДУ) ручного сопровождения цели, сопрягаемое с прибором управления стрельбой корабельной артиллерийской установки (ПУС АУ), содержащее визирную колонку (ВК), состоящую из вращающейся части с установленным на ней датчиком положения ВК по курсовому углу (КУ) и качающейся части с установленными на ней лазерным биноклем-дальномером (ЛБД) и датчиком положения ВК по углу места (УМ), отличающееся тем, что на качающейся части ВК установлена кнопка синхронизации (подачи команды на излучение лазера ЛБД), а в состав ВДУ введены электронный хронометр, фиксирующий моменты излучения лазерного дальномера ЛБД и измеряющий интервалы времени между последним и предыдущим моментом измерения дальности, и последовательно соединенные блок перевода отсчетов датчиков положения ВК по УМ и КУ в стабилизированную сферическую систему координат, селектор формирования дискретных значений стабилизированных координат УМ и КУ цели в моменты измерения дальности D до цели, преобразователь дискретных значений стабилизированных сферических координат D, УМ и КУ цели в прямоугольную стабилизированную систему координат и экстраполятор, обеспечивающий запоминание и экстраполяцию дискретных декартовых координат цели для использования их в ПУС АУ, при этом ЛБД соединен по входу с кнопкой синхронизации (подачи команды на излучение лазера ЛБД), а по выходу - с входом преобразователя дискретных значений стабилизированных сферических координат D, УМ и КУ цели в прямоугольную стабилизированную систему координат, другие два входа преобразователя соединены с выходами селектора формирования дискретных значений УМ и КУ в моменты измерения дальности до цели, два сигнальных входа которого соединены с выходами блока перевода отсчетов датчиков положения ВК по УМ и КУ в стабилизированную сферическую систему координат, а хронирующий вход селектора соединен с кнопкой синхронизации (подачи команды на излучение лазера ЛБД), соединенной также с входом электронного хронометра, блок перевода отсчетов датчиков положения ВК по УМ и КУ в стабилизированную сферическую систему координат соединен по входам с соответствующими датчиками ВК, а по входам сигналов бортовой, килевой качки и курса корабля с корабельной системой гиростабилизации (СГС), выходы преобразователя дискретных значений стабилизированных сферических координат D, УМ и КУ цели в прямоугольную стабилизированную систему координат X, Y, Н соединены с соответствующими тремя входами экстраполятора, хронирующий вход которого соединен с выходом электронного хронометра, а три выхода по сигналам экстраполированных декартовых координат цели - с входами прибора управления стрельбой ПУС АУ.
2. Способ уточнения текущих координат сопровождаемой в ручном режиме цели, заключающийся в том, что в процессе ручного сопровождения цели, в моменты точного совмещения линии визирования визирной колонки с целью измеряют дальность до цели и фиксируют соответствующий момент времени с помощью электронного хронометра; определяют мгновенные (дискретные) значения угла места и курсового угла цели в моменты измерения дальности; преобразовывают дискретные значения сферических координат цели в декартовы координаты цели в прямоугольной стабилизированной системе координат и запоминают их до следующего момента измерений; определяют интервал времени между последним и предыдущим моментами точного совмещения линии визирования ВК с целью; на основе изменения дискретных значений декартовых координат цели за интервал времени между двумя последовательными измерениями определяют составляющие скорости цели в прямоугольной стабилизированной системе координат; экстраполируют дискретные значения декартовых координат цели, соответствующие последнему моменту измерения; подают экстраполированные значения декартовых координат цели на соответствующие входы прибора управления стрельбой для использования их в качестве текущих координат сопровождаемой цели.
| ПРИЦЕЛЬНОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОГНЕМ КОРАБЕЛЬНОЙ МАЛОКАЛИБЕРНОЙ АРТУСТАНОВКИ | 2008 |
|
RU2368859C1 |
| НОВОСЕЛОВ Б.В | |||
| Проектирование квазиоптимальных следящих систем комбинированного регулирования, М.: Энергия, 1972, с.50-67 | |||
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2001 |
|
RU2192034C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
RU2012034C1 |
| МАКСИМОВ М.В., ГОРГОНОВ Г.И | |||
| Радиоэлектронные системы самонаведения, М.: Радио и связь, 1982, с.110-112 | |||
| КУНЦЕВИЧ В.М., ЧЕХОВОЙ Ю.Н | |||
| Нелинейные | |||

