Изобретение относится к области радиотехники, в частности к способу определения координат манипулятором типа «пространственная мышь» и устройствам ввода информации в компьютер.
Известен способ определения координат манипулятора типа «электронное перо», заключающийся в том, что в манипулятор встраивают передатчик с одной антенной, генерирующей импульсы электромагнитного поля, которые принимает антенна приемника, встроенная в планшет. Реализуется способ с помощью устройства, антенна приемника которого выполнена в виде прямоугольной сетки проводников, в которых поле, генерируемое антенной манипулятора, возбуждает электрические сигналы, а по величине амплитуды сигналов в проводниках определяются координаты антенны передатчика, а следовательно, и координаты манипулятора относительно поверхности планшета (см. патент США №3598903 от 06.06.1968 г.).
Недостатками аналогов являются ограниченность функциональных возможностей, т.к. рабочая площадь манипулятора ограничена размерами планшета; отсутствует возможность определения пространственных и угловых координат манипулятора в пространстве трех измерений.
Наиболее близким по технической сущности и достигаемому результату как для предлагаемых способа, так и устройства является изобретение «Способ определения координат манипулятора типа «мышь» или «электронное перо» и устройство для его осуществления» (патент РФ №2368941, МПК G01F 3/046, G01S 5/00, опубл. 27.09.2009 г.). Согласно изобретению-прототипу для расширения функциональных возможностей и области применения манипулятора типа «мышь» или «электронное перо» создают излучение электромагнитных волн с помощью встроенной в манипулятор основной антенны передатчика. Прием этих электромагнитных волн осуществляют с помощью по меньшей мере трех пространственно разнесенных антенн приемника - в случае перемещения манипулятора по плоскости и с помощью как минимум 4-х пространственно разнесенных антенн приемника - в случае перемещения манипулятора в пространстве. Измеряют разности фаз сигналов на различных парах антенн приемника и по соотношению разностей фаз вычисляют координаты манипулятора на плоскости или в пространстве. Устройство для определения координат манипулятора типа «мышь» или «электронное перо» содержит передатчик манипулятора со встроенной в манипулятор основной антенной и приемное устройство, включающее не менее 3-х пространственно разнесенных антенн при перемещении манипулятора по плоскости и не менее 4-х пространственно разнесенных антенн при перемещении манипулятора в пространстве.
Недостатками прототипа является сложное конструктивное выполнение передатчика манипулятора, требующее проводной связи или автономных источников питания, а также наличие нескольких значительно разнесенных в пространстве модулей с проводной связью, усложняющих устройство.
Задачей создания изобретения является создание 5D-манипулятора типа «пространственная мышь», свободного от недостатков прототипа.
Поставленная задача решается с помощью признаков, указанных в пункте 1 формулы изобретения, общих с прототипом, таких как способ определения координат манипулятором типа «пространственная мышь» для введения данных в компьютер, предусматривающий создание излучения поля передатчиком, измерение поля приемником в нескольких, разнесенных в пространстве точках, в случае перемещения манипулятора в пространстве с последующим вычислением координат в пространстве, и отличительных существенных признаков, таких как в качестве передатчика берут постоянный некалиброванный магнит, создают им магнитное поле, измеряют магнитное поле в нескольких точках, сосредоточенных в компактной области пространства, по данным измерения поля решают обратную задачу для магнитного диполя и в результате определяют три пространственные координаты и две угловые координаты источника поля (магнитного диполя), для решения обратной задачи измеряют среднее значение вектора индукции поля источника, его первую производную, а также измеряют фоновое поле (поле в отсутствие источника) - либо отдельным вынесенным за пределы области действия передатчика датчиком либо измеряют фоновое поле в процессе калибровки, когда оператор убирает передатчик из области действия приемника манипулятора.
Поставленная задача решается с помощью признаков, указанных в пункте 2 формулы изобретения, общих с прототипом, таких как устройство, для определения координат манипулятором типа «пространственная мышь» для введения данных в компьютер, содержащее передатчик манипулятора и приемное устройство, подключенное к компьютеру, и отличительных существенных признаков, таких как в качестве передатчика манипулятора используют магнит, а в качестве переносчика информации используют магнитное поле В, при этом приемное устройство выполнено в виде набора датчиков магнитного поля, подключенных через усилители к аналого-цифровым преобразователям, выходы которых связаны с микропроцессором или напрямую с персональным компьютером.
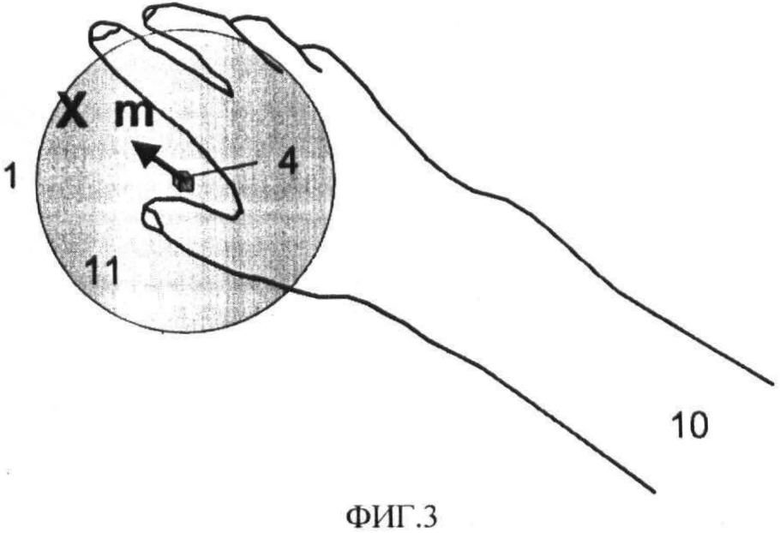
Согласно п.3 формулы изобретения магнит жестко установлен на кольце из немагнитного материала, которое надевается на палец руки оператора.
Или согласно пунктам 2 или 3 формулы изобретения магнит установлен в оболочку, например шарообразной формы, удобной для оператора, выполненную из немагнитного материала.
Согласно пункту 5 формулы изобретения несколько многоканальных усилителей и аналого-цифровых преобразователей могут быть выполнены в виде одного канала усиления и аналого-цифрового преобразования сигнала, при этом вход этого канала коммутируется между датчиками.
Вышеперечисленная совокупность существенных признаков позволяет получить следующий технический результат - более простое аппаратурное оформление процесса определения координат, компактность устройства, реализующего способ, простота конструктивного выполнения передатчика, отсутствие проводной связи передатчика с приемником, возможность использования в качестве источника некалиброванного магнита.
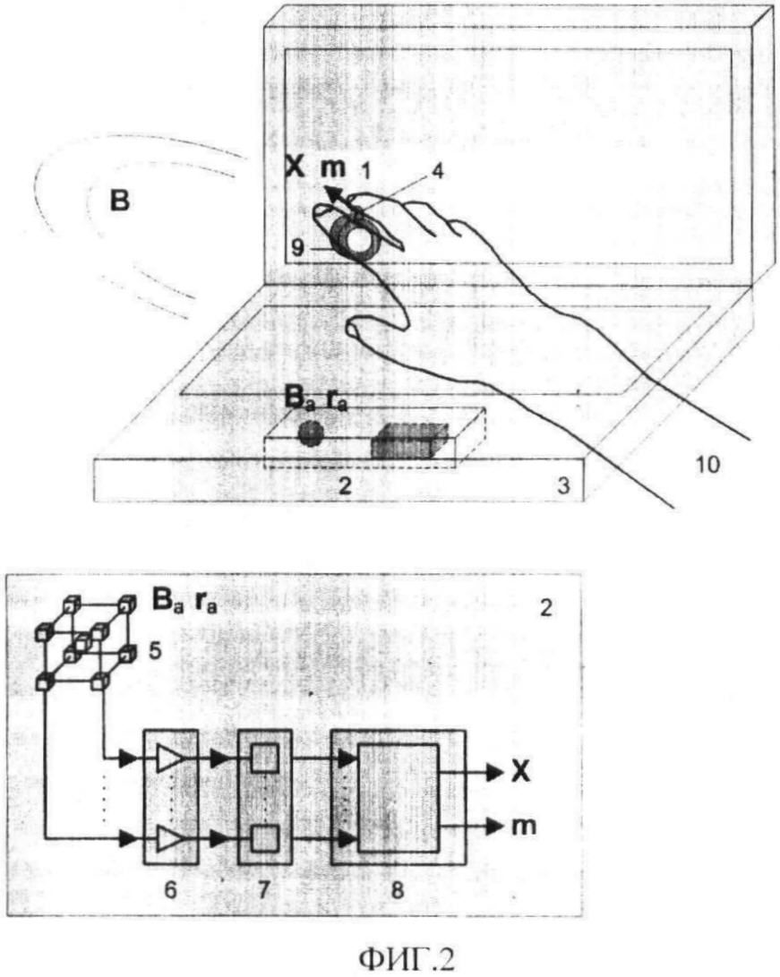
Изобретение иллюстрируется чертежами, раскрывающими устройство для осуществления предлагаемого способа. На фиг.1 представлен общий вид устройства, где Х -3D - координаты диполя, m - вектор его магнитного момента, ra - координаты точек измерения, Ba - поле в точках измерения; на фиг.2 приведена блок-схема приемного устройства; на фиг.3 - вариант «мыши» шарообразной формы; на фиг.4 - геометрическое представление обратной задачи для точечного магнитного диполя.
Устройство для определения координат манипулятором типа «пространственная мышь» для введения данных в компьютер содержит (фиг.1, 2) передатчик манипулятора 1 и приемное устройство 2, подключенное к компьютеру 3. В качестве передатчика 1 манипулятора используют магнит 4, а в качестве переносчика информации используют магнитное поле В. Приемное устройство 2 выполнено в виде набора датчиков 5 магнитного поля, подключенных через усилители 6 к аналого-цифровым преобразователям 7, выходы которых связаны с микропроцессором 8 или напрямую с персональным компьютером 3.
Магнит 4 жестко установлен на кольцо 9 из немагнитного материала, надеваемого на палец руки 10 оператора. Как вариант, магнит 4 установлен в оболочку 11 любой формы (удобной для оператора), выполненную из немагнитного материала.
В устройстве несколько многоканальных усилителей 6 и аналого-цифровых преобразователей 7 могут быть выполнены в виде одного канала усиления и аналого-цифрового преобразования сигнала, вход этого канала коммутируется между датчиками 5.
Пример осуществления способа.
Способ определения координат манипулятором типа «пространственная мышь» для введения данных в компьютер 3 предусматривает создание излучения поля передатчиком 1, измерение поля В приемником 2 в нескольких, разнесенных в пространстве точках, в случае перемещения манипулятора в пространстве с последующим вычислением координат в пространстве. В качестве передатчика берут постоянный некалиброванный магнит 4, создают им магнитное поле В, измеряют магнитное поле в нескольких точках, сосредоточенных в компактной области пространства, по данным измерения поля решают обратную задачу для магнитного диполя и в результате определяют три пространственные координаты и две угловые координаты источника поля (магнитного диполя), для решения обратной задачи измеряют среднее значение вектора индукции поля источника, его первую производную, а также измеряют фоновое поле (поле в отсутствие источника) - либо отдельным вынесенным за пределы области действия передатчика датчиком, либо измеряют фоновое поле в процессе калибровки, когда оператор убирает передатчик из области действия приемника манипулятора.
На фиг.1, 2 приведен магнитный 5D-манипулятор (5D-мышь), представляющий собой устройство пятимерного позиционирования, которое позволяет измерять 3 координаты положения в пространстве и 2 координаты, задающие ориентацию. Данный манипулятор может использоваться для взаимодействия человека с компьютером, например, для работы в редакторах 3D графики и моделирования, дистанционного управления автономными устройствами и т.п. Устройство может быть как подключаемым к компьютеру, так и интегрированным в него. Устройство может быть как дополнением к системам ввода touchpad (на ноутбуках), планшетах, так и заменять их. Устройство может быть снабжено кнопками, позволяющими оператору передавать необходимые команды.
Возможные области применения:
- использование 5D-манипулятора в качестве средства ввода информации в компьютер при работе с 3D-редакторами, системами дистанционного управления автономными устройствами и т.п.;
- использование 5D-манипулятора в робототехнических системах в качестве датчика, определяющего положение одного элемента системы относительно другого.
Преимущества устройства:
- перемещаемая часть манипулятора (надеваемая на палец/руку оператора) представляет собой простое кольцо (из немагнитного материала) со встроенным постоянным магнитом, при этом, существенным является отсутствие необходимости в точной подгонке и знании параметров магнитного момента магнита;
- нет связи источника с системой измерения (отсутствуют сигнальные проводники);
- не требуется питание источника поля;
- в перспективе измерительная и вычислительная части системы могут быть реализованы в виде одного интегрального модуля (интегральной схемы) малых размеров, что упростит использование установки и снизит ее стоимость;
- измерительная и вычислительная части системы могут быть как интегрированными в компьютер, так и подключаться к нему.
В основе 5D-манипулятора лежит метод решения обратной задачи для одного точечного магнитного диполя.
Схема 5D-манипулятора представлена на Фиг.1 и 2. Кольцо из немагнитного материала надето на палец руки оператора. К этому кольцу жестко прикреплен постоянный магнит с некоторым, заранее неизвестным, магнитным моментом m. Поле, создаваемое этим магнитом, измеряется в некотором дискретном наборе точек измерения, сосредоточенных в области пространства S, достаточно малой, по сравнению с расстоянием до магнита-источника поля. Сигналы с датчиков поля усиливаются набором усилителей AMP и оцифровываются АЦП (на фиг. не отмечены). По полученным данным измерения трех компонент индукции магнитного поля Ba в точках измерения с координатами ra (в системе координат манипулятора), программа (Свидетельства Роспатента №2011616795, №2006610006) процессора DSP решает обратную задачу для одного точечного магнитного диполя (ОЗД) и находит координаты Х источника-магнита и направление его магнитного момента m (в системе координат манипулятора).
Для успешного решения ОЗД необходимо либо знание фонового поля (поля в отсутствие магнита-источника), либо измерение первой и второй производных поля (что на практике достаточно трудно сделать из-за наличия шумов измерения).
Для того чтобы измерить фоновое поле, можно использовать этап калибровки 5D-манипулятора, на котором оператору предлагается убрать магнит-источник из области действия манипулятора. Манипулятор измерит магнитное поле, и, если оно удовлетворит требованию однородности (см. ниже), запомнит его в качестве фонового поля.
Кроме того, предполагая, что магнитное поле вблизи манипулятора и компьютера достаточно однородно, можно измерить фоновое поле (три его компоненты в одной точке пространства) датчиком, который вынесен за пределы области действия установки.
Метод решения обратной задачи для точечного магнитного диполя представлен далее.
Метод решения обратной задачи для одного точечного магнитного диполя (ОЗД)
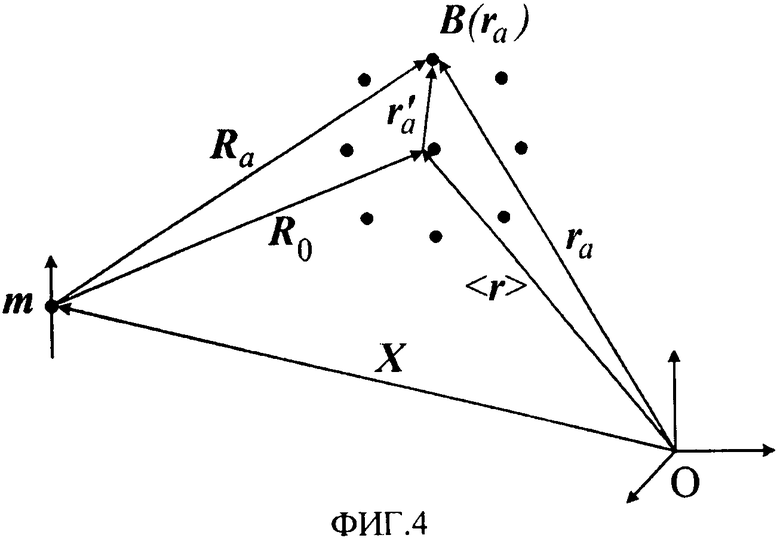
Продемонстрируем несколько методов решения обратной задачи для точечного магнитного диполя (Фиг.4).
Точечный магнитный диполь расположен в точке Х лабораторной системы координат (системой координат манипулятора) и создает вокруг себя статическое магнитное поле. Необходимо определить пространственное положение X, величину и ориентацию вектора магнитного момента m диполя по данным измерения индукции создаваемого им магнитного поля В(ra) в нескольких известных точках пространства ra (a=1, 2, …, M).
Важно, что характерный размер области измерения S много меньше расстояния |R0| от диполя до центра области измерения: S<<|R0|.
Суть метода решения данной задачи представлена ниже.
Решение ОЗД методом, не имеющим особенности в "нулевой" плоскости. Случай линейного приближения
Предположим, что для представления поля может быть использована линейная аппроксимация (это возможно, если точки измерения находятся достаточно близко друг к другу):

здесь B0 - постоянная составляющая индукции поля, а т - тензор второго ранга, одинаковый для всех точек измерения.
Поле точечного диполя в вакууме выражается (в системе СИ) формулой

здесь µ0=4π×10-7 Гн/м.
Раскладывая  в ряд Тейлора возле центра области измерения R0 при условии, что характерный размер области измерения S<<R0, и оставляя только два первых слагаемых, получаем
в ряд Тейлора возле центра области измерения R0 при условии, что характерный размер области измерения S<<R0, и оставляя только два первых слагаемых, получаем

Дифференцируя (2) по Ra и сопоставляя (1) и (3), мы получим соотношение между первыми производными поля:

Умножая (1) на R0, получим:

Подставляя (4) в (5), получим выражение:

которое можно переписать следующим образом:

Выражение (7) представляет собой систему уравнений, из которой можно найти R0k. При этом значения Bak,  - известны (это результаты измерений), B0k - вычисляется из (1) методом наименьших квадратов.
- известны (это результаты измерений), B0k - вычисляется из (1) методом наименьших квадратов.
Вычислив R0, мы, по сути, нашли положение диполя x, т.к.

Далее из уравнения (2) находим m:

Решение ОЗД методом, не имеющим особенности в "нулевой" плоскости. Случай квадратичного приближения
Предположим теперь, что для представления поля может быть использована квадратичная аппроксимация:

Так же, как и в случае линейного приближения, разложим  в ряд Тейлора возле центра области измерения R0 при условии, что характерный размер области измерения S<<R0, и оставив только три первых слагаемых, получим:
в ряд Тейлора возле центра области измерения R0 при условии, что характерный размер области измерения S<<R0, и оставив только три первых слагаемых, получим:

Дифференцируя (2) по Ra и сопоставляя их, легко получить следующие соотношения между B0k, Tki и Qkij:


Умножив (10) на R0k, получим:

и подставляя (13) в полученное выражение, получим

Из полученной системы уравнений можно найти R0k, а значит и положение диполя Xk - в соответствии с (8) и магнитный момент диполя - в соответствии с (9). Отметим, что значения Bak,  - известны (это результаты измерений), B0k, Tki - вычисляются из (10) методом наименьших квадратов.
- известны (это результаты измерений), B0k, Tki - вычисляются из (10) методом наименьших квадратов.
Увеличение точности решения ОЗД
Учитывая тот факт, что тензоры Tki, Qkij и т.д. являются симметричными, можно уменьшить число неизвестных в уравнениях метода наименьших квадратов, что приведет к увеличению точности решения.
Оценка точности решения ОЗД и определение факта обнаружения объекта
Для того чтобы оценить точность решения ОЗД, можно использовать следующий критерий:

Здесь  - величина индукции магнитного поля, создаваемая диполем (найденным в результате решения ОЗД), вычисленная в точках измерения ra. Ba - измеренные значения индукции поля в тех же точках измерения. Чем меньше значение критерия g, тем выше точность решения.
- величина индукции магнитного поля, создаваемая диполем (найденным в результате решения ОЗД), вычисленная в точках измерения ra. Ba - измеренные значения индукции поля в тех же точках измерения. Чем меньше значение критерия g, тем выше точность решения.
Для того чтобы определить факт попадания объекта в область действия установки, можно использовать следующий критерий:

Здесь sBa - измеренные значения индукции индуцирующего поля (поля в отсутствие объекта) в точках измерения ra, а s+oBa - измеренные значения индукции суммарного поля (поля в присутствии объекта) в тех же точках измерения. Если значение критерия w превышает некоторый заданный порог wdet, значит, объект обнаружен (!) и можно для него попытаться решить обратную задачу, для того, чтобы определить его координаты и магнитный момент (!).
Рекомендации по решению ОЗД
- аппроксимации более высоких порядков для поля (при отсутствии шума измерения) дают более точные решения, что особенно заметно "вблизи" источника (или при увеличении размера области измерения). Но при наличии шумов оптимальным следует считать использование линейного приближения;
- предложенный путь преодоления особенности в "нулевой" плоскости, использующий критерий (16), работоспособен;
- совместное использование уравнений-соотношений между производными высоких порядков действительно снимает проблему особенности решения в "нулевой" плоскости. Но шумы измерения приводят к недостаточной точности решения, поэтому эти уравнения становятся неприменимыми;
- существенное увеличение числа М точек измерения лишь незначительно увеличивает точность решения;
- оптимальной конфигурацией точек измерения среди конфигураций ("крест", "коробка", "куб", "сфера", "шар") следует считать "крест" (точки измерения расположены на трех ортогональных отрезках): при том же самом числе точек измерения она позволяет получать наиболее точное решение;
- самой неудачной конфигурацией является "сфера" (точки измерения распределены по поверхности сферы); она вообще не позволяет получить решение с приемлемой точностью;
- решение обратной задачи для диполя достаточно устойчиво в отношении шумов измерения поля.
Экспериментально полученные результаты и возможности метода
Для натурного моделирования решения ОЗД был использован аппаратно-программный комплекс [2], обладающий следующими основными характеристиками:
Для измерения вектора индукции магнитного поля используется интегральный датчик Холла 2SA-10 фирмы SENTRON. Чтобы измерять 3 компоненты поля индукции, использовалось 2 датчика, расположенных в перпендикулярных плоскостях. Измерение компонент вектора индукции поля двумя датчиками в одной точке достигалось соответствующим сдвигом второго датчика так, чтобы его чувствительная область располагалась в той же точке пространства, что и первая область.
Для того чтобы измерять поле в дискретном наборе точек посредством описанной выше системы из двух датчиков, использовалась 3D-система позиционирования, построенная на трехшаговых двигателях. Для того чтобы исключить их влияние (они сделаны из магнитных материалов) на результаты измерения, датчики магнитного поля были удалены от них посредством достаточно длинного держателя (около 120-150 мм) из немагнитного материала.
Посредством описанной системы были достигнуты следующие основные результаты:
При использовании в качестве источника постоянного магнита с модулем магнитного момента 0.05 А/м2, конфигурации области измерения куб 3×3×3 точки измерения с шагом 0.95 мм по каждой из осей, погрешность определения местоположения магнита составила от 1 до 3 мм (растет при удалении от магнита) на расстояниях до 40 мм.
Список литературы
1. Машкин С.В. Аппаратно-программный комплекс магнитного компьютерного видения // Вестник Перм. ун-та. Инф. сист. и техн. 2005. Вып.4. С.66-80.
2. Марценюк М.А., Машкин С. В., Селиверстов Е.В. Моделирование навигации автономного агента посредством системы магнитного компьютерного видения // Вестник Перм. ун-та. Инф. сист. и техн. 2005. Вып.4. С.11-25.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ДЕФОРМАЦИЙ ОБЪЕКТОВ ИЗ НЕМАГНИТНЫХ МАТЕРИАЛОВ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2518616C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МАНИПУЛЯТОРА ТИПА "МЫШЬ" ИЛИ "ЭЛЕКТРОННОЕ ПЕРО" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368941C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 2009 |
|
RU2453760C2 |
| ДАЛЬНОМЕРНАЯ СИСТЕМА И МЕТОДИКА ПРИМЕНЕНИЯ МАГНИТНЫХ МОНОПОЛЕЙ | 2013 |
|
RU2634465C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2313477C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБКИ ЗОНДА ДЛЯ ПРИБОРА НА ОСНОВЕ ИНДУКЦИИ ИЛИ РАСПРОСТРАНЕНИЯ С ПОПЕРЕЧНЫМИ ИЛИ ТРЕХОСНЫМИ МАССИВАМИ | 2004 |
|
RU2401442C2 |
| СИСТЕМЫ И СПОСОБЫ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ПОДПОВЕРХНОСТНОЙ ПРОВОДИМОСТИ | 2003 |
|
RU2358293C2 |
| СПОСОБ ДИАГНОСТИЧЕСКОГО КОНТРОЛЯ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2016 |
|
RU2633018C2 |
| Способ измерения длины подземного трубопровода | 2017 |
|
RU2662246C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА МЕТОДОМ МАГНИТОМЕТРИЧЕСКОЙ СЪЕМКИ | 2013 |
|
RU2542625C1 |
Изобретение относится к способу определения координат манипулятором типа «пространственная мышь» и устройствам ввода информации в компьютер. Техническим результатом является упрощение аппаратурного оформления процесса определения координат, компактность устройства, реализующего способ, простота конструктивного выполнения передатчика, отсутствие проводной связи передатчика с приемником, возможность использования в качестве источника некалиброванного магнита. Способ определения координат манипулятором типа «пространственная мышь» для введения данных в компьютер предусматривает, что в качестве передатчика берут постоянный некалиброванный магнит, создают им магнитное поле, измеряют магнитное поле в нескольких точках, сосредоточенных в компактной облаети пространства, по данным измерения поля решают обратную задачу для магнитного диполя и в результате определяют три пространственные координаты и две угловые координаты источника поля (магнитного диполя). Устройство для определения координат манипулятором типа «пространственная мышь» для введения данных в компьютер содержит в качестве передатчика магнит, в качестве переносчика информации использует магнитное поле, при этом приемное устройство выполнено в виде набора датчиков магнитного поля, подключенных через усилители к аналого-цифровым преобразователям, выходы которых связаны с микропроцессором или напрямую с персональным компьютером. 2 н. и 3 з.п. ф-лы, 4 ил., 1 табл.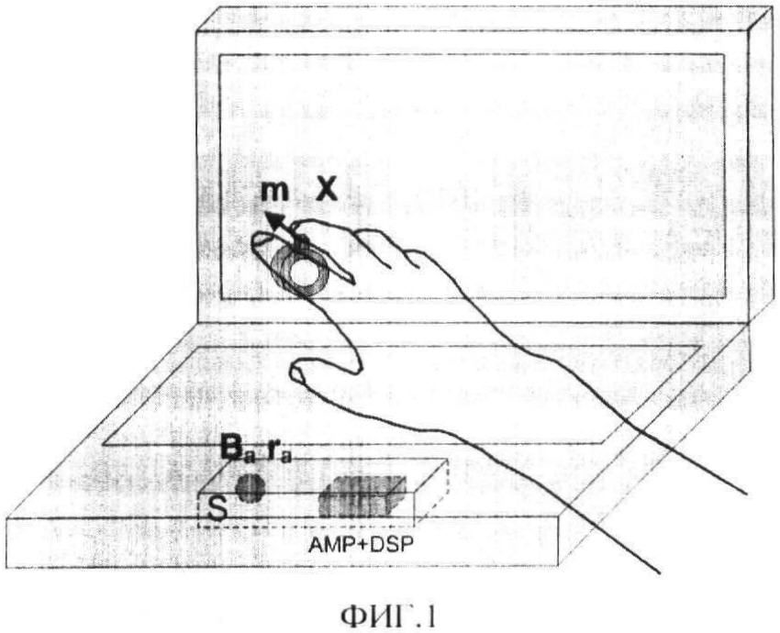
1. Способ определения координат манипулятором типа «пространственная мышь» для введения данных в компьютер, предусматривающий создание излучения поля передатчиком, измерение поля приемником в нескольких, разнесенных в пространстве точках, в случае перемещения манипулятора в пространстве с последующим вычислением координат в пространстве, отличающийся тем, что в качестве передатчика берут постоянный некалиброванный магнит, создают им магнитное поле, измеряют магнитное поле в нескольких точках, сосредоточенных в компактной области пространства, по данным измерения поля решают обратную задачу для магнитного диполя и в результате определяют три пространственные координаты и две угловые координаты источника поля (магнитного диполя), для решения обратной задачи измеряют среднее значение вектора индукции поля источника, его первую производную, а также измеряют фоновое поле (поле в отсутствие источника) либо отдельным вынесенным за пределы области действия передатчика датчиком, либо измеряют фоновое поле в процессе калибровки, когда оператор убирает передатчик из области действия приемника манипулятора.
2. Устройство для определения координат манипулятором типа «пространственная мышь» для введения данных в компьютер, содержащее передатчик манипулятора и приемное устройство, подключенное к компьютеру, отличающееся тем, что в качестве передатчика манипулятора используют магнит, а в качестве переносчика информации используют магнитное поле В, при этом приемное устройство выполнено в виде набора датчиков магнитного поля, подключенных через усилители к аналого-цифровым преобразователям, выходы которых связаны с микропроцессором или напрямую с персональным компьютером.
3. Устройство по п.2, отличающееся тем, что магнит жестко установлен на кольцо из немагнитного материала, одеваемого на палец руки оператора.
4. Устройство по п.2 или 3, отличающееся тем, что магнит установлен в оболочку любой формы (удобной для оператора), выполненную из немагнитного материала.
5. Устройство по п.2, отличающееся тем, что несколько многоканальных усилителей и аналого-цифровых преобразователей могут быть выполнены в виде одного канала усиления и аналого-цифрового преобразования сигнала, вход этого канала коммутируется между датчиками.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МАНИПУЛЯТОРА ТИПА "МЫШЬ" ИЛИ "ЭЛЕКТРОННОЕ ПЕРО" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368941C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В ЭЛЕКТРОННО-ВЫЧИСЛИТЕЛЬНУЮ МАШИНУ (ЭВМ) | 2000 |
|
RU2173882C1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| US 8038629 В2, 11.10.2011. | |||

