Изобретение относится к области железнодорожной автоматики, телемеханики и связи и может быть использовано на локомотивах, моторвагонных подвижных составах с целью повышения безопасности и регулирования движения поездов, а также в системах интервального регулирования с использованием радиоканала.
Известно устройство для контроля местоположения локомотива (RU №2063349, B61L 23/16, 25/04, 1993), содержащее станционное оборудование, включающее передатчик, приемник, генератор тактовых импульсов, счетчик, усилитель, шаговый двигатель, блок контроля угла поворота антенны, аналого-цифровой преобразователь, таймер, дешифратор, три регистра, блок сравнения, блок определения расстояния, блок памяти путевых участков и блок ввода номера локомотива. Локомотивный комплект оборудования состоит из приемника и передатчика, подключенных к антенне, приемник через инвертор подключен к таймеру, другой вход которого подключен к блоку ввода номера локомотива, а выход подключен к передатчику.
Недостатком этого устройства является обязательное наличие станционного устройства, причем чем больше локомотивов на станции, тем сложнее и крупнее это устройство. Эти недостатки снижают надежность управления движением, усложняют обслуживание и повышают его стоимость.
Известно поездное устройство автоматической локомотивной сигнализации с регулированием скорости (RU 2120393, B61L 25/06, 1996), которое содержит блок задания скорости, блок приема сигналов, блоки заграждающих и полосовых фильтров, блок управления торможением, блоки формирования выходных сигналов.
Недостатками этого устройства являются недостаточность сигнальных показаний для оперативного принятия решений машинистом, отсутствие надлежащей гибкости в выборе оптимального скоростного режима, устаревшая элементная база.
Наиболее близким к заявленному изобретению по совокупности существенных признаков и функциональным возможностям является устройство контроля за управлением локомотивом и бдительностью машиниста (RU 2262459, B61L 25/04, 2003), которое содержит включенные в систему реального времени с модульной архитектурой, заключенные в общий блок, расположенный в кабине машиниста, и соединенные между собой объединительной платой ячейки схемы контроля безопасности, двухканального модуля измерения параметров движения, двухканального модуля внешних устройств, модуля маршрута и модуля радиоканала.
Основным недостатком этого устройства является отсутствие функций управления и возможности наращивания количества контролируемых функций и управляющих параметров, а также то, что регулирование скорости и принятие решения о торможении может быть принято и выполнено только машинистом, что ограничивает контроль за поездной ситуацией на станции и как следствие снижение безопасности.
Технический результат изобретения заключается в повышении надежности и безопасности работы бортовой аппаратуры маневровой автоматической локомотивной сигнализации.
Технический результат достигается тем, что в бортовой аппаратуре маневровой автоматической локомотивной сигнализации, содержащей шкаф управления, предназначенный для подключения бортовой аппаратуры к управляемым цепям локомотива, включенные в систему реального времени контроллер бортовой, блоки индикации, согласования датчиков импульсов, переключателей управления, аппаратуру радиоканала передачи данных, содержащую радиостанцию и полосовой фильтр, антенну спутниковой навигации, датчики импульсов локомотивные и источник питания локомотивной электроники, при этом контроллер бортовой выполнен с возможностью информирования о состоянии органов управления локомотива, обмена информации с радиостанцией, блоком индикации, блоком управления и осуществления в автоматическом режиме управления дизель-генераторной установкой локомотива, блок индикации выполнен с возможностью отображения информации о состоянии электрооборудования локомотива, наличии связи по радиоканалу передачи данных со станционным устройством маневровой автоматической локомотивной сигнализации, фактической скорости и направлении движения локомотива, режиме работы аппаратуры и состоянии напольных светофоров на маршруте, блок согласования сигналов выполнен с возможностью согласования сигналов, поступающих от датчиков пути и скорости маневровой автоматической локомотивной сигнализации на контроллер бортовой, а блок управления выполнен с возможностью ввода информации и изменения конфигурации аппаратуры.
Для упрощения и удобства использования бортовой контроллер выполнен так, что он содержит стабилизатор напряжения, модули питания, предназначенные для преобразования постоянного напряжения в стабилизированное постоянное напряжение питания входящих в бортовой контроллер процессорного модуля и схемы безопасности, контролирующей правильность работы программного обеспечения, блока индикации, датчиков локомотивных импульсов, а также модуль релейный, предназначенный для переключения режима работы БА МАЛС из ручного в автоматический, приемник радионавигационных сигналов от навигационных систем спутников через антенну спутниковой навигации.
Для удобства использования бортовой контроллер размещен в содержащем каркас корпусе, который установлен в нишу локомотива с помощью резьбовых втулок на амортизаторах, при этом на направляющих каркаса в корпусе бортового контроллера закреплены с помощью соединителей модули питания, схемы безопасности, модуль релейный, приемник навигационных сигналов, кроме того в качестве несущей части использованы три шасси, изолированные от корпуса и скрепленные механически П-образно, при этом на вертикальном шасси установлен модуль процессорный, а на горизонтальных - платы оптомодулей и каркас сверху и снизу, блок индикации выполнен в виде навесного прибора, который установлен перед машинистом локомотива, а блок управления состоит из клавиатуры, помещенной в металлический корпус с устройством подсветки.
Сравнение заявленного технического решения с аналогом и прототипом позволило установить его соответствие критерию новизна, так как оно не известно из уровня техники.
Предложенное устройство является промышленно применимым и явным образом не следует из уровня техники.
Следовательно, предложенное техническое решение соответствует установленным условиям патентоспособности.
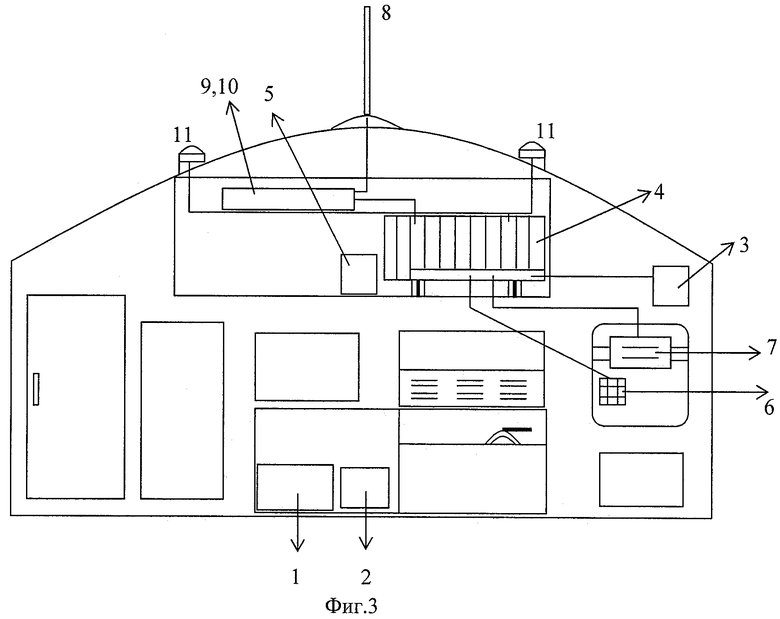
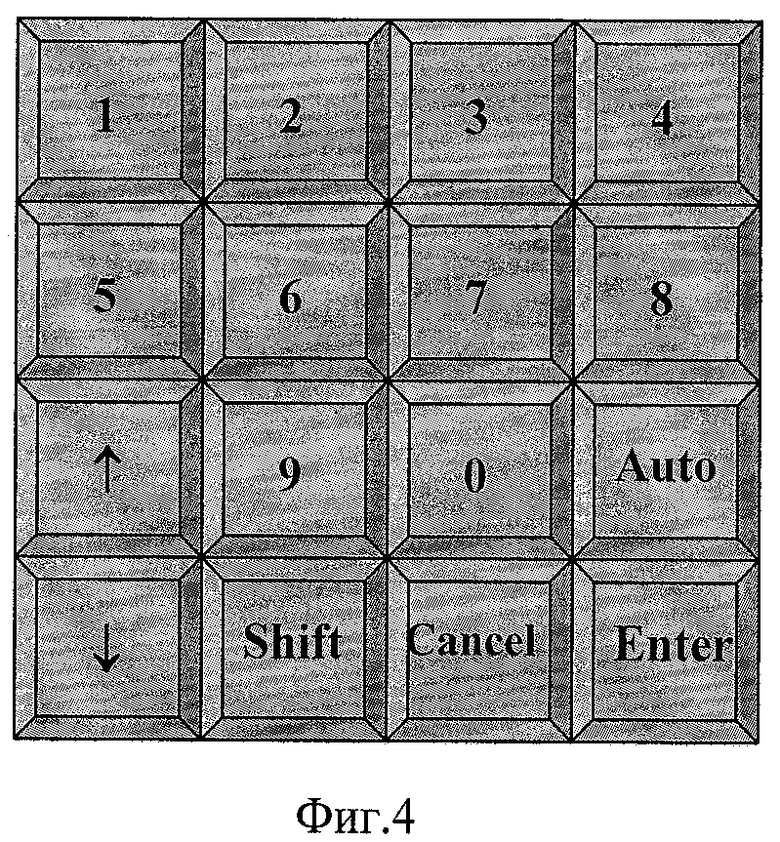
Сущность заявленного решения поясняется чертежами, где на фиг.1 показана структурная схема БА МАЛС, на фиг.2 - блок-схема блока контролера, на фиг.3 - схема расположения БА МАЛС в кабине машиниста, на фиг.4 - клавиатура блока управления.
БА МАЛС содержит шкаф управления (ШУ) 1, вход которого соединен с источником питания (ИП-ЛЭ) 2, а выход с блоком переключения (БП) 3, выход которого соединен с блоком контроллера (БК) 4, входы которого соединены с выходами блока согласования датчиков импульсов (БСС-ДПС) 5, а выходы с блоком управления (БУ) 6, блоком индикации (БИ) 7, аппаратурой радиоканала передачи данных (РК) 8, состоящей из полосового фильтра 9 и радиостанции 10 и антенной спутниковой навигации (АУУ) 11.
Основной функциональной частью БА МАЛС (фиг.2) является блок контроллера БК4. Блок БК производит обработку информации о состоянии органов управления локомотива, обмен информацией с радиостанцией, блоком БИ 7 блоком БУ 6 и осуществляет в автоматическом режиме управление дизель генераторной установкой локомотива.
Контролер бортовой БК4 содержит следующие основные модули:
- стабилизатор напряжения СН12, модули питания МП-5(13-1); МП-12(13-2) и МП-15(13-3), модуль релейный МР 14, модуль согласования МС 15, модуль процессорный ПМ 16, приемник радионавигационных сигналов МНП.
Стабилизатор напряжения СН устанавливается на входе модулей питания и содержит элементы фильтрации схемы питания и защиты от переполюсовки напряжений.
Модуль питания МП-5(13-1) предназначен для преобразования постоянного напряжения 50 В с выхода CH - в стабилизированное постоянное напряжение 5 В для питания модуля процессорного ПМ и модулей опторазвязки МОП.
Модуль питания МП-12(13-2) предназначен для преобразования постоянного напряжения 50 В с выхода CH в стабилизированное постоянное напряжение 12 В для питания модуля ПМ и блока БИ.
Модуль питания МП-15(13-3) предназначен для преобразования постоянного напряжения 50 В с выхода CH в стабилизированные постоянные напряжения плюс 15 В и минус 15 В для питания датчиков ДИЛ(17-1, 17-2)- и схемы безопасности в МС.
В состав модулей питания входят импульсные источники питания, осуществляющие гальваническую развязку между внутренними цепями БК и источником питания ИП-ЛЭ. На передних панелях модулей питания расположены контрольные гнезда для измерения напряжений и индикаторы контроля наличия напряжений.
Модуль релейный МР предназначен для переключения режима работы БА МАЛС из ручного в автоматический. При этом происходит отключение с помощью реле встроенной электроники локомотива и независимой обмотки возбудителя, а также подключение к выходным ключам БК, через которые осуществляется управление цепями локомотива.
Модуль согласования МС содержит схему безопасности, контролирующую правильность работы программного обеспечения БК, при этом должен гореть индикатор СБ. На передней панели модуля расположены индикаторы для контроля работы датчиков ДИЛ (17-1, 17-2). Модуль процессорный ПМ содержит одноплатный процессорный модуль, предназначенный для выработки сигналов управления оборудованием локомотива, обмена информацией с радиостанцией, блоком БИ и блоком БУ, приема информации от навигационного приемника МНП. На одноплатный процессорный модуль устанавливается специальный модуль, предназначенный для приема сигналов от датчика давления, датчика тока и выдачи сигналов светофора на блок БИ.
Приемник радионавигационных сигналов МНП предназначен для приема сигналов от навигационных спутниковых систем GPS и ГЛОНАСС.
Питание блока БК осуществляется от источника питания локомотивного ИП-ЛЭ стабилизированным напряжением величиной (50±5) В.
Несущей конструкцией БК (фиг.3) является корпус, который устанавливается в нишу локомотива с помощью резьбовых втулок на амортизаторах. В каркасе БК имеются направляющие для установки следующих модулей: модулей питания МП-5, МП-12, МП-12Р, МП-15-15, стабилизатора напряжения СП-50, модуля релейного МР, модуля сопряжения МС и приемника навигационного МНП. Модули устанавливаются в БК с помощью соединителей. Также несущую часть конструкции выполняют три шасси, изолированных от корпуса, скрепленные механически П-образно. На вертикальном шасси, изолированно от корпуса, установлены модули процессорные, на горизонтальных - платы оптомодулей и каркас сверху и снизу соответственно. В нижней части корпуса расположены экранированные общим экраном платы фильтров.
Платы опторазвязки соединяются с модулями процессорными при помощи плоских шлейфов.
Монтаж в БК выполнен на модульных соединителях, расположенных в задней части корпуса и, соединяющихся с выходными соединителями, расположенными в нижней передней части корпуса проводами в виде жгутов. Монтаж между платами оптомодулей, выходными и модульными соединителями выполнен проводами в виде жгутов, расположенных в задней части корпуса.
Радиостанция крепится на изолирующую пластину. Пластина крепится к корпусу БК с левой стороны. Модули БК выполнены печатным монтажом. На передних панелях модулей расположены: индикация, контрольные гнезда и винты для фиксации их в БК.
Для защиты БК от внешних воздействий окружающей среды предусмотрен кожух, в котором верхняя и передняя части выполнены из прозрачного материала для визуального контроля за работой модулей и оптомодулей БК.
Блок БИ предназначен для отображения следующей информации о:
- состоянии электрооборудования локомотива;
- наличии связи по радиоканалу передачи данных с СУ МАЛС;
- фактической скорости и направлении движения локомотива;
- режиме работы аппаратуры;
- состоянии напольных светофоров на маршруте.
Питание блока БИ осуществляется вторичным напряжением постоянного тока (12,0±0,5) В, подаваемым с блока БК.
Блок индикации БИ выполнен в виде навесного прибора, который устанавливается перед машинистом локомотива на кронштейне, крепящемся на уголках.
Несущей конструкцией блока является корпус. Корпус состоит из двух частей, соединенных плоскими жгутами. В передней части корпуса установлены плата управления дисплеем и плата фильтров. Во второй части корпуса устанавливаются на стойках плата светофоров и жидкокристаллическая панель.
На боковую стенку корпуса (слева от передней панели) выведены соединители подключения блока к аппаратуре и органы управления блока, там же располагается клемма заземления блока.
В центре передней панели расположен жидкокристаллический дисплей, прикрытый защитным стеклом, слева от него расположены индикаторы светофора.
Блок согласования сигналов БСС-ДПС предназначен для согласования сигналов, поступающих от датчиков ДИЛ на контроллер бортовой БК.
Датчики импульсов локомотивные ДИЛ предназначены для преобразования угла поворота колеса в электрические импульсы, с помощью которых определяется фактическая скорость и направление движения локомотива. Датчики устанавливается на буксах колесных пар локомотива.
Питание датчиков ДИЛ осуществляется стабилизированным напряжением постоянного тока 50 В от ИП-ЛЭ через блок БСС-ДПС.
Блок БП предназначен для подачи питания на аппаратуру БА МАЛС.
Питание блока БП осуществляется от стабилизированного источника питания локомотивного ИП-ЛЭ с входным напряжением величиной (50±5) В.
Несущей конструкцией блока переключателей БП является корпус. На лицевой панели корпуса имеются тумблер «ПИТАНИЕ» и тумблеры «МАЛС» и «ЭПК». Соединители типа СНЦ расположены на боковых стенках корпуса БП. Внизу блока находятся два предохранителя «РЕ/КВ», «NPP/NPM», закрытых крышкой.
Блок БУ предназначен для ввода информации.
Блок БУ состоит из клавиатуры, помещенной в металлический корпус (фиг.4). Для удобства работы в темное время суток имеется устройство подсветки и тумблер «ПОДСВЕТКА».
Назначение клавиш блока БУ:
- «АВТО» («AUTO») - перевод управления локомотивом из ручного режима в автоматический;
- «↓», «↑» - регулирование скорости в авторежиме при местном управлении скоростью;
- «ОТМЕНА» («CANCEL») - отмена операций;
- «ВВОД» («ENTER») - подтверждение выполнения операций;
- «РЕГ» («SHIFT») - переключение между пунктами меню конфигурации;
- «0» - переключение режимов «телеуправление» и «местное управление»;
- «8» - подсчет пройденного пути;
- «0-9» - введение информации о диаметре колеса, номере локомотива и т.д.
Питание блока БУ осуществляется вторичным напряжением постоянного тока (15,0±0,5) В, подаваемым с блока БК.
Блок управления БУ выполнен в виде навесного прибора, который устанавливается на уголок, прикрепленный около рабочего места машиниста. Несущей конструкцией блока является кожух, в который устанавливается клавиатура. Слева от клавиатуры к кожуху с помощью винтов крепится устройство подсветки.
Шкаф управления ШУ предназначен для подключения бортовой аппаратуры к управляемым цепям локомотива.
Шкаф управления ШУ выполнен в виде навесного устройства, который устанавливается на раму. На боковых поверхностях блока установлены соединители для подключения к электрооборудованию локомотива и для связи с блоком БП.
Радиостанция и антенна РК обеспечивают непрерывную связь между СУ МАЛС и бортовой аппаратурой.
Антенна спутниковой навигации АУУ-1 предназначена для приема сигналов от спутников навигационных систем GPS и ГЛОНАСС.
Питание антенны АУУ-1 осуществляется вторичным напряжением постоянного тока (12,0±0,5) В, подаваемым с блока БК.
Антенна (основной и резервный комплект) включается в БА МАЛС в специализированный модуль GPS (основной и резервный комплект). Модули увязываются с процессорными платами по каналу RS-232. Передача информации на пост осуществляется по цифровому радиоканалу БА МАЛС-СУ МАЛС.
Источник питания локомотивной электроники ИП-ЛЭ предназначен для питания аппаратуры БА МАЛС стабилизированным напряжением с номинальным значением 50 В, гальванически развязанным от бортовой сети питания локомотива.
БА МАЛС работает следующим образом.
Работа БА МАЛС начинается сразу после подачи питания на БА МАЛС. В блоке БК 4 автоматически начинает загружаться программное обеспечение и на мониторе блока БИ должно появиться устойчивое изображение рабочего экрана машиниста. Затем с помощью тумблера на блоке БП осуществляется подключение цепей управления локомотива к блоку БК. Локомотив автоматически вводится в систему, при этом обеспечивается непрерывная связь между СУ МАЛС и бортовой аппаратурой.
Скорость локомотива определяется аппаратурой следующим образом:
1. С помощью электронной платы, встроенной в датчик ДИЛ, измеряется угол поворота колеса локомотива. Результатом данного измерения является импульс, который обрабатывается усилителем, встроенным в эту же плату.
2. С клемм ДИЛ уже преобразованный сигнал поступает в БК.
3. БК измеряет частоту импульсов и выводит на экран БИ показание реальной скорости передвижения локомотива.
Схемой устройства предусмотрены три режима работы БА МАЛС:
- «Ручное управление»;
- «Телеуправление»;
- «Местное управление».
«Ручное управление» машинист осуществляет в штатном режиме согласно правил технической эксплуатации ПТЭ и технико-распорядительного акта ТРА станции. При этом на мониторе блока БИ отображается значение фактической скорости, измеряемое с помощью датчиков ДИ, направление движения (вперед, назад) и режим работы «P» (ручной).
В режиме «Телеуправление» локомотив управляется автоматически (тяга и торможение) в соответствии с заданной скоростью, значение которой поступает с СУ МАЛС. Для перехода в этот режим машинист переводит рукоятку контроллера машиниста КМ в любое положение, кроме нулевого, и нажимает клавишу «АВТО» на блоке БУ. На мониторе блока БИ под надписью режим работы появляется «А» (автоматический).
В режиме «Местное управление» машинист имеет возможность сам изменять скорость локомотива. Аппаратура поддерживает скорость, заданную машинистом.
Проверка бдительности машиниста осуществляется в следующих случаях:
- скатывание локомотива (скатывание фиксируется аппаратурой после фиксации остановки локомотива, когда значение фактической скорости становится больше 1 км/ч, а контактор «KB» не включился);
- превышение допустимой скорости более чем на 1 км/ч;
- неисправность БА МАЛС (гаснет монитор блока БИ и обесточивается клапан ЭПК.
Если подтверждение бдительности, путем нажатия на рукоятку РБ, отсутствует в течение 6 с, срабатывает клапан «ЭПК» и происходит экстренное торможение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| СИСТЕМА ГОРОЧНОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА (ГАЛС Р) | 2005 |
|
RU2303542C1 |
| УСТРОЙСТВО ИНТЕЛЛЕКТУАЛЬНОЙ БОРТОВОЙ АППАРАТУРЫ МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2012 |
|
RU2487035C1 |
| УПРАВЛЯЮЩИЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2419123C1 |
| СИСТЕМА ПЕРЕДАЧИ ДАННЫХ МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2011 |
|
RU2478509C1 |
| Станционное устройство системы маневровой автоматической локомотивной сигнализации, интегрированной с микропроцессорной централизацией железнодорожной станции | 2022 |
|
RU2780257C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| БОРТОВАЯ АППАРАТУРА АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2007 |
|
RU2341396C1 |
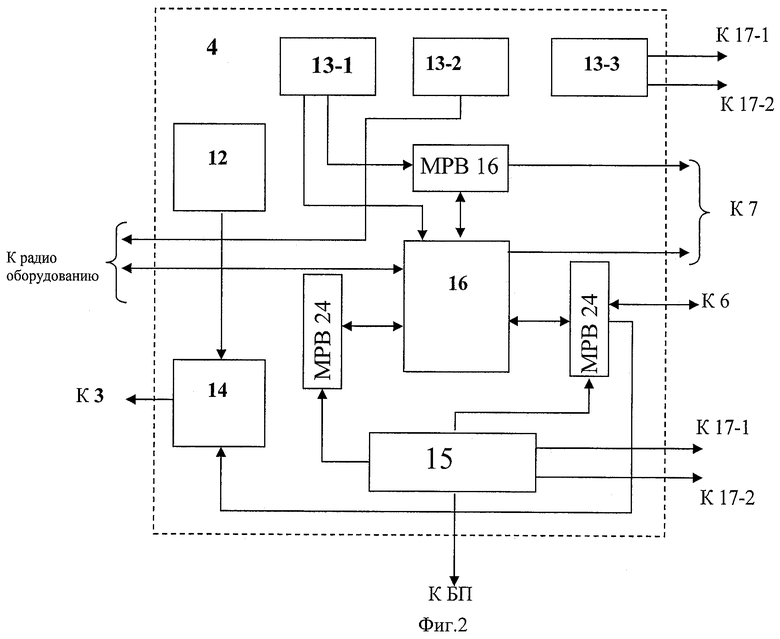
Изобретение относится к области железнодорожной автоматики, телемеханики и связи и может быть использовано на локомотивах, моторвагонных подвижных составах с целью повышения безопасности и регулирования движения поездов, а также в системах интервального регулирования с использованием радиоканала. Система содержит шкаф управления (1), предназначенный для подключения бортовой аппаратуры к управляемым цепям локомотива, вход которого соединен с источником питания (2), а выход с блоком переключения (3), выход которого соединен с блоком бортового контроллера (4), который выполнен с возможностью информирования о состоянии органов управления локомотива. Входы бортового контроллера соединены с выходами блока согласования датчиков импульсов (5), а выходы с блоком управления (6), блоком индикации (7), аппаратурой радиоканала передачи данных (8), состоящей из полосового фильтра (9), радиостанции (10) и антенной спутниковой навигации (11). Достигается повышение надежности и безопасности работы бортовой аппаратуры маневровой автоматической локомотивной сигнализации. 4 з.п. ф-лы, 4 ил.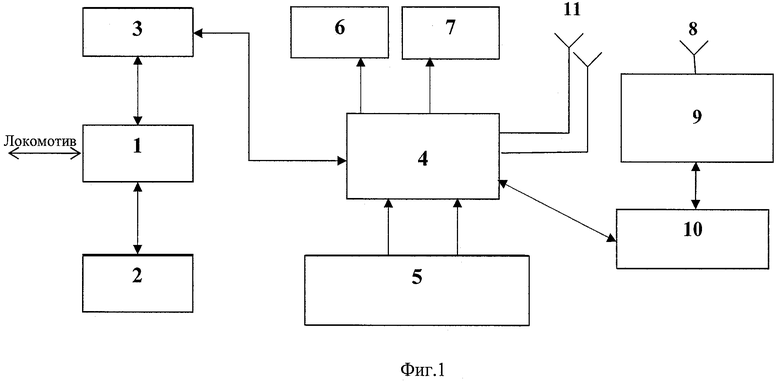
1. Бортовая аппаратура маневровой автоматической локомотивной сигнализации, содержащая шкаф управления, предназначенный для подключения бортовой аппаратуры к управляемым цепям локомотива, включенные в систему реального времени и расположенные в кабине машиниста контроллер бортовой, блоки индикации, согласования датчиков импульсов, переключателей управления, аппаратуру радиоканала передачи данных, содержащую радиостанцию и полосовой фильтр, антенну спутниковой навигации, датчики импульсов локомотивные и источник питания локомотивной электроники, при этом вход шкафа управления соединен с источником питания, а выход с блоком переключения, выход которого соединен с блоком контролера, входы которого соединены с выходами блока согласования датчиков импульсов, а выходы с блоком управления, блоком индикации, аппаратурой радиоканала передачи данных, состоящей из полосового фильтра и радиостанции и антенной спутниковой навигации, контроллер бортовой выполнен с возможностью информирования о состоянии органов управления локомотива, обмена информации с радиостанцией, блоком индикации, блоком управления и осуществления в автоматическом режиме управления дизель-генераторной установкой локомотива, блок индикации выполнен с возможностью отображения информации о состоянии электрооборудования локомотива, наличии связи по радиоканалу передачи данных со станционным устройством маневровой автоматической локомотивной сигнализации, фактической скорости и направлении движения локомотива, режиме работы аппаратуры и состоянии напольных светофоров на маршруте, блок согласования датчиков импульсов выполнен с возможностью согласования сигналов, поступающих от датчиков пути и скорости маневровой автоматической локомотивной сигнализации на контроллер бортовой, а блок управления выполнен с возможностью ввода информации и изменения конфигурации аппаратуры.
2. Бортовая аппаратура по п.1, в которой бортовой контролер содержит стабилизатор напряжения, модули питания, предназначенные для преобразования постоянного напряжения в стабилизированное постоянное напряжения питания входящих в бортовой контролер процессорного модуля и схемы безопасности модуля согласования, контролирующей правильность работы программного обеспечения, блока индикации, датчиков локомотивных импульсов, а также модуль релейный, предназначенный для переключения режима работы БА МАЛС из ручного в автоматический, приемник радионавигационных сигналов от навигационных систем спутников через антенну спутниковой навигации.
3. Бортовая аппаратура по п.2, в которой бортовой контролер размещен в содержащем каркас корпусе, который установлен в нишу локомотива с помощью резьбовых втулок на амортизаторах, при этом на направляющих каркаса в корпусе бортового контролера закреплены с помощью соединителей модуль питания, схемы безопасности, модуль релейный, приемник навигационных сигналов, а в качестве несущей части использованы три шасси, изолированные от корпуса и скрепленные механически П-образно, при этом на вертикальном установлен модуль процессорный, а на горизонтальных - платы оптомодулей и каркас сверху и снизу.
4. Бортовая аппаратура по п.1, в которой блок индикации выполнен в виде навесного прибора, который установлен перед машинистом локомотива.
5. Бортовая аппаратура по п.1, в которой блок управления состоит из клавиатуры, помещенной в металлический корпус с устройством подсветки.
| СИСТЕМА ГОРОЧНОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА (ГАЛС Р) | 2005 |
|
RU2303542C1 |
| БОРТОВАЯ АППАРАТУРА АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2007 |
|
RU2341396C1 |
| УСТРОЙСТВО ДЛЯ МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 1998 |
|
RU2159716C2 |
| EP 17223021 B1, 27.08.2008 | |||
| УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ПОЕЗДОВ И ПОДОБНЫХ ТРАНСПОРТНЫХ СИСТЕМ | 2002 |
|
RU2333860C2 |

