Настоящее изобретение относится к протоколу управления доступом к ультраширокодиапазонной (УШД, UWB) среде (УДС, MAC). Более конкретно настоящее изобретение относится к динамическому периоду маяковых сигналов в протоколе для UWB MAC. Еще более конкретно настоящее изобретение относится к сокращению и удлинению фазы маякового сигнала в протоколе для UWB MAC, содержащем протокол распределенного резервирования (ПРР, DRP). Изобретение также относится к любой беспроводной системе, которая использует протокол MAC, содержащий протокол распределенного резервирования.
Беспроводные сети используют маяковые сигналы для установления и поддержания связи. Один протокол MAC устраняет необходимость в сетевой инфраструктуре посредством функций распределения по всем узлам беспроводной сети. В этом протоколе MAC нет точки доступа или центрального координатора для персональной беспроводной сети (ПБС, WPAN), см. спецификацию управления доступом к беспроводной среде (УДС, MAC) альянса многодиапазонных МДОЧР (OFDM) (MBOA, АМДМ) для высокоскоростных персональных беспроводных сетей (ПБС, WPAN), проект 0.6, июль 2004, которая включена сюда посредством ссылки. Дополнительно эта спецификация содержит протокол распределенного резервирования (ПРР, DRP) для оповещения об использовании эфирного времени устройства посредством передачи маякового сигнала, распознавания использования эфирного времени соседними устройствами посредством приема маяковых сигналов от них и принятие во внимание использования эфирного времени другим устройством, до передачи/приема данных. Изобретатель настоящего изобретения был одним из авторов основы для этого нового стандарта и внес настоящее изобретение в предложение на базовую линию. В настоящее время несколько конкретных дополнений для этого изобретения установлены посредством MBOA.
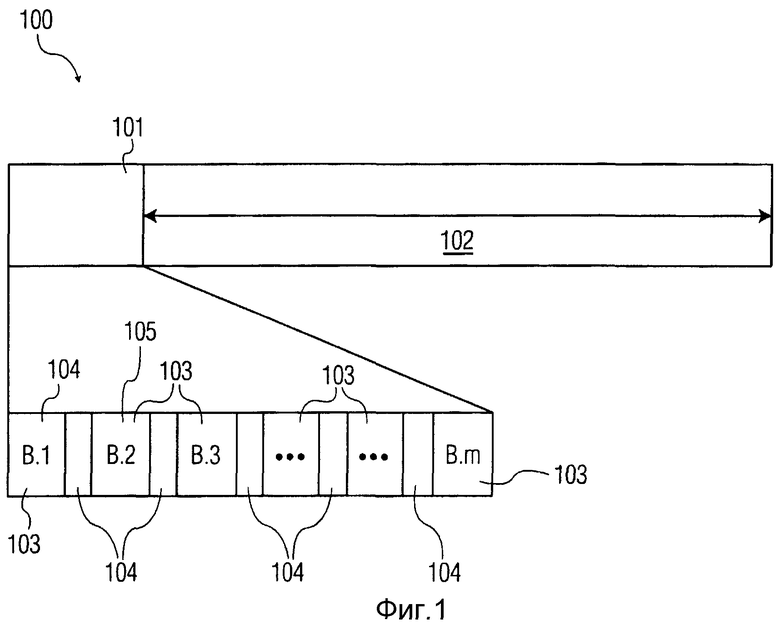
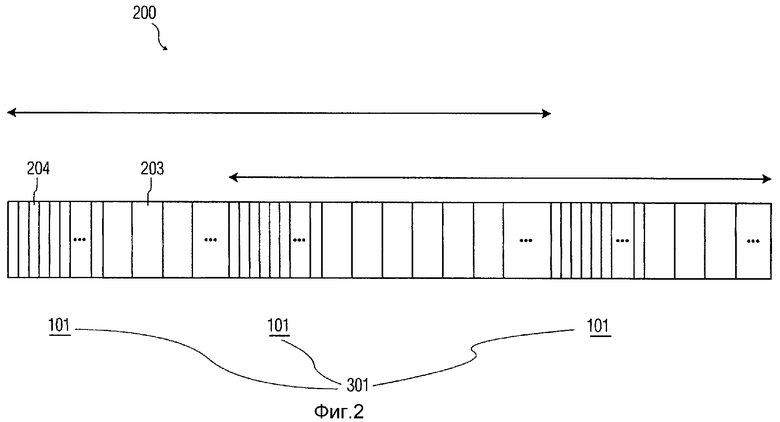
Согласно этому изобретению и связанному стандарту MBOA, со ссылкой на фиг.1, для поддержания координации между устройствами связи всем устройствам требуется регулярно передавать маяковый сигнал 103. Для передачи/приема маяковых сигналов 103 в некоторой области устройства резервируют период времени, названный периодом 101 маякового сигнала (ПМС, BP), соответственно для передачи и приема маякового сигнала. Группа устройств, которые совместно используют этот период 101 маякового сигнала, называется группой устройств маякового сигнала, см. фиг.2. Маяковый сигнал 103 обеспечивает основную синхронизацию в сети и передает информацию, относящуюся к одновременным резервированиям. Структура основной синхронизации является суперкадром 100, 100.1, 100.N. Конкретные параметры протокола, которые выбраны MBOA, являются длиной суперкадра 100 из 65536 [мкс], которая состоит из 256 временных интервалов (203) доступа к среде (ВИДС, MAS), где длина каждого MAS равна 256 [мкс]. Временные интервалы MAS 203 нумеруются от 0 до 255. Несколько типов временных интервалов определяются в зависимости от того, как MAS 203 используются устройством или соседними устройствами.
До того как связь может быть установлена, устройство должно создать свою собственную группу устройств маякового сигнала или присоединиться к существующей группе 201 устройств маякового сигнала. Для каждого BP 101 последовательные MAS 203 используются как временные интервалы 203 маяковых сигналов, где все устройства передают свои маяковые сигналы 103. Начальное время суперкадра 100 определяется началом периода 101 маякового сигнала и определяется в качестве начального времени периода маякового сигнала (НВПСО, BPST), и временные интервалы 203 MAS нумеруются относительно этого начального времени. Когда устройство устанавливает новую группу устройств маякового сигнала, оно определяет границу суперкадра в любой интервал времени, который не пересекается с другими резервированиями временных периодов этой группы устройств маякового сигнала.
Это создает распределенный протокол MAC, очень хорошо подходящий для узкоспециализированных применений и передачи от узла к узлу сети. Кроме того, резервирование среды посредством устройств, на которых базируется распределенное MAC, исключает время считывания и время коллизии в среде. Однако фиксированной длины период маякового сигнала, в течение которого могут отправляться все маяковые сигналы, вероятно содержит пустые временные интервалы маяковых сигналов или недостаточно временных интервалов маяковых сигналов, что способствует неэффективному использованию среды общего доступа.
Динамический период маякового сигнала необходим для уменьшения неэффективного использования среды, случающегося при фиксированном периоде маякового сигнала, разрешая в то же время большому максимальному числу устройств участвовать в сети.
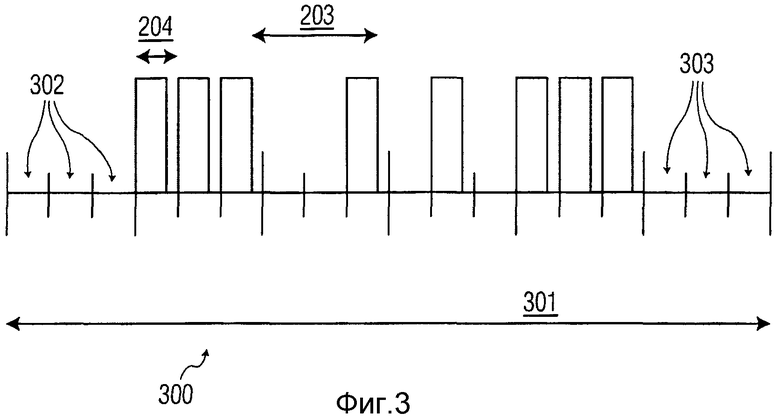
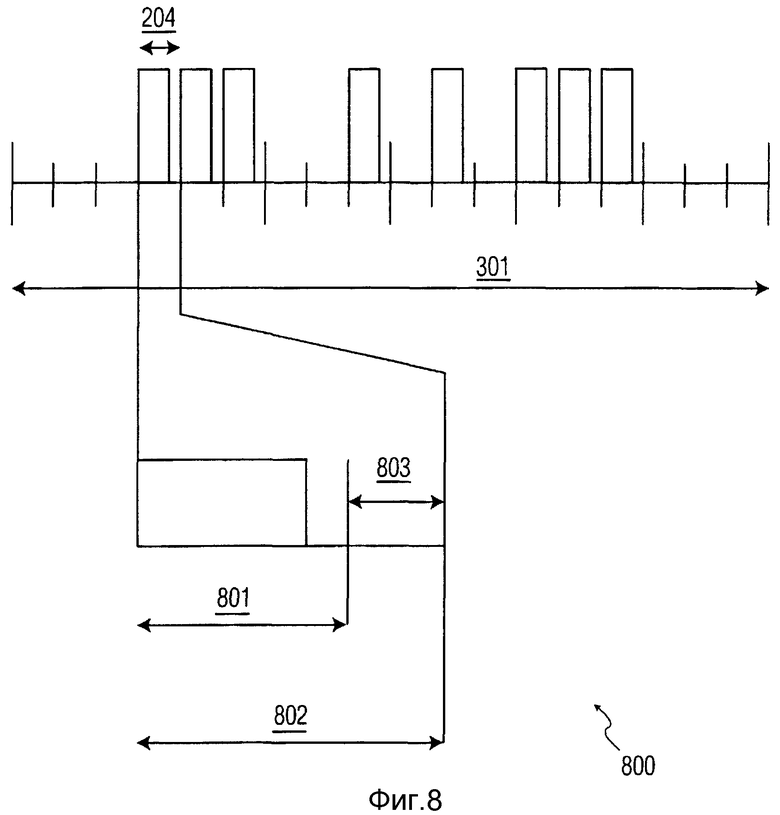
В соответствии с настоящим изобретением устройства, которые предназначены для использования в связи с другими устройствами, отправляют маяковый сигнал в течение динамического BP 301. Структура BP 301 показывается на фиг.3. Устройство не передает кадры, иные чем кадры 103 маяковых сигналов, в течение BP 301 и сканирует в поисках других кадров маяковых сигналов в течение BP 301. BP 301 согласно настоящему изобретению является динамическим по длине и включает в себя переменное число временных интервалов 303 маяковых сигналов. Даже несмотря на динамику по длине, BP имеет некоторую максимальную длину, заданную в числе MAS 203 или временных интервалов 204 маяковых сигналов. Каждый временной интервал 203 MAS содержит заранее заданное число временных интервалов 204 маяковых сигналов продолжительностью «ДлинаВременногоИнтервалаМаяковогоСигнала» 802, см. фиг.8. BP 301 может включать в себя некоторое число временных интервалов в начале или в конце 302, которые являются пустыми или зарезервированными для специальных целей.
В соответствии с настоящим изобретением время разделяется на суперкадры 100, как показано на фиг.2. В начале каждого суперкадра 100 имеется динамический BP 301, за которым следует интервал/фаза 102 передачи данных. Также возможно, что суперкадр содержит несколько BP различных групп устройств маяковых сигналов, как показано на фиг.2. Каждая группа устройств маяковых сигналов имеет свои собственные границы суперкадров. Число временных интервалов 204 маяковых сигналов в BP может увеличиваться или уменьшаться в зависимости от числа занятых временных интервалов маяковых сигналов, соответственно устройств, в группе устройств передачи маяковых сигналов.
За каждым из множества кадров 103 маяковых сигналов в BP 101 следует короткая межкадровая область плюс mЗащитноеВремяМаяковогоСигнала 803. Максимальная длина кадра маяковых сигналов составляет mМаксДлинаМаяковогоСигнала 801. Каждый временной интервал 303 маякового сигнала имеет длину ДлинаВременногоИнтервалМаяковогоСигнала 802(BeaconSlotLength).
Фиг.1 показывает схему полного суперкадра предшествующего уровня техники;
фиг.2 показывает структуру суперкадра настоящего изобретения;
фиг.3 показывает динамический BP согласно настоящему изобретению;
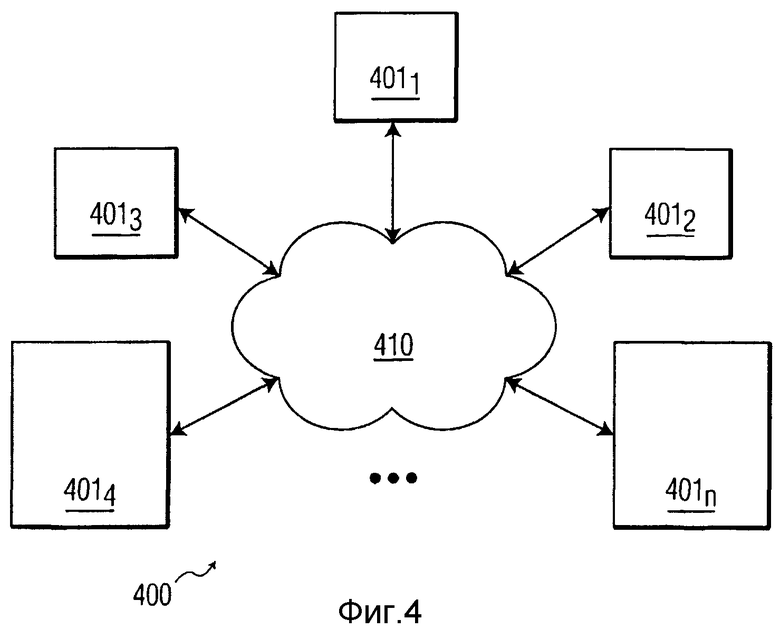
фиг.4 показывает беспроводную сеть устройств, модифицированных в соответствии с настоящим изобретением;
фиг.5 показывает устройство, модифицированное в соответствии с настоящим изобретением;
фиг.6 показывает формат кадра маяковых сигналов;
фиг.7А показывает формат информационного элемента занятости динамического периода маякового сигнала;
фиг.7В показывает формат информационного поля интервала маякового сигнала;
фиг.8 показывает кадр маякового сигнала, содержащийся в динамическом BP; и
фиг.9 показывает сдвиг кадров маяковых сигналов в динамическом BP.
Специалисту в данной области техники будет понятно, что последующие раскрытия обеспечиваются для целей показа, а не для ограничения. Специалист понимает, что имеется множество изменений, которые лежат в сущности изобретения и в объеме приложенной формулы. Излишние подробности известных функций и операций могут быть опущены из настоящего описания с тем, чтобы не затруднять понимание настоящего изобретения.
Фиг.4 показывает соответствующую беспроводную персональную сеть 400, к которой должны применяться варианты осуществления настоящего изобретения. Сеть включает в себя множество персональных беспроводных устройств 401 связи. В традиционном подходе каждое устройство 401 может присоединяться к любой специализированной сети в своей зоне 402 радиодействия и поэтому может участвовать более чем в одном BP.
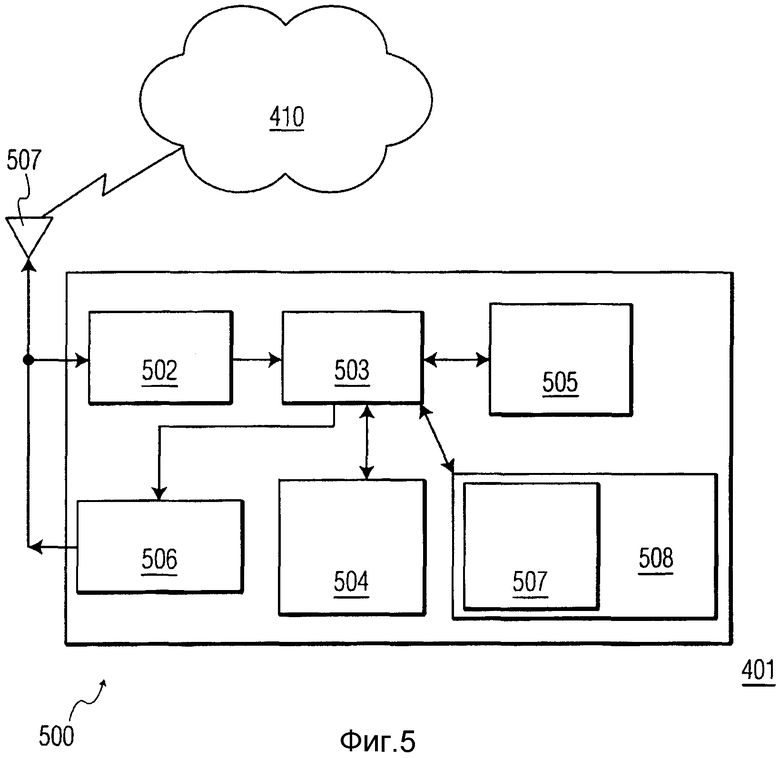
Каждое беспроводное устройство 401 в WPAN 400, показанной на фиг.4, может включать в себя систему, включающую в себя архитектуру, которая показана на фиг.5. Как показано, каждое беспроводное устройство 401 может включать в себя антенну 506, подключенную к приемнику 502, который осуществляет связь через беспроводную среду 510. Каждое из устройств 401 дополнительно содержит процессор 503 и модуль 504 обработки маяковых сигналов. Например, в устройстве процессор 503 выполняется с возможностью приема от приемника 502 кадра 601 маяковых сигналов, включающего в себя один или несколько информационных элементов 602 занятости периода маякового сигнала (ИЭЗПМС, BPOIE), имеющих соответствующие положения маяковых сигналов, и для обработки кадра 601 маяковых сигналов, используя модуль 504 обработки маяковых сигналов для определения, а именно устройств группы устройств передачи маякового сигнала, и их характеристик, и сохранения их в таблице 507 возможностей устройства, которая является частью памяти 508. Память, кроме того, сохраняет информацию, касающуюся типов и числа временных интервалов маяковых сигналов в каждом динамическом периоде маякового сигнала, и записывает динамическую длину каждого динамического периода маякового сигнала. В устройстве 401 процессор 503 дополнительно выполняется с возможностью использования модуля 504 обработки маяковых сигналов для расширения BP 101 и сужения BP 101, когда требуется, посредством формирования динамического BP 301.
После включения питания устройства 401, оно сканирует на наличие маяковых сигналов 103. Если после сканирования на наличие маяковых сигналов устройство 401 не обнаружило каких-либо маяковых сигналов 103, до передачи или приема устройством кадров MAC оно отправляет маяковый сигнал для создания BP 301. Устанавливается отсчетное начало BP и суперкадр, который может быть несколькими временными интервалами маяковых сигналов до переданного маякового сигнала. Результирующие пустые временные интервалы 302 могут использоваться другими устройствами для целей, которые лежат вне объема настоящего изобретения. Устройство 401 продолжает отправлять маяковый сигнал 103 в BP каждого последующего суперкадра 100 до тех пор, пока оно не обнаружит коллизию маяковых сигналов, как описывается ниже.
Кадр маяковых сигналов включает в себя информацию, относящуюся к длине BP. Эта информация о длине может указываться за пределами последнего занятого временного интервала маяковых сигналов. Итоговые временные интервалы 303 маяковых сигналов также могут использоваться для специальных целей. В соответствии с этим изобретением одной такой целью может быть расширение BP для приспособления дополнительных устройств.
Если устройство 401 обнаруживает один или более маяковых сигналов 103, оно не создает новый BP 301. Взамен устройство определяет собственную текущую группу устройств передачи маякового сигнала по принятым маяковым сигналам 103. Текущая группа устройств передачи маяковых сигналов для этого устройства содержит устройства, от которых устройство 401 приняло по меньшей мере один кадр 103 маяковых сигналов в течение последних суперкадров 100 mПотерянныхМаяковыхСигналов. Если устройство 401 принимает маяковые сигналы, которые размещаются в разных BP, оно выбирает один или несколько периодов, в которые отправляет собственный маяковый сигнал до осуществления связи с другим устройством.
Начало BP 301 совпадает с началом ассоциированного суперкадра 100 и может быть выведено из номера временного интервала маякового сигнала, включенного в маяковый сигнал. Конец BP 301 также объявляется в маяковом сигнале, определенном посредством последнего занятого временного интервала маякового сигнала или MAS, плюс в конечном счете некоторое число временных интервалов 303 для специальных целей. Различные устройства могут объявлять различные длины BP, ввиду того, что они могут иметь различных соседей и поэтому обнаруживают различное число занятых временных интервалов маяковых сигналов. Это является одной из причин, почему длина BP ограничивается некоторой максимальной длиной.
Есть несколько альтернатив для выбора временного интервала маякового сигнала при соединении с сетью. Когда временной интервал выбран, устройство 401 отправляет маяковый сигнал в том же временном интервале маякового сигнала в каждом последующем суперкадре 100 до тех пор, пока оно не обнаружит коллизию маяковых сигналов. Если определяется коллизия маяковых сигналов, новый временной интервал выбирается одним из способов, которые могут использоваться для соединения с сетью.
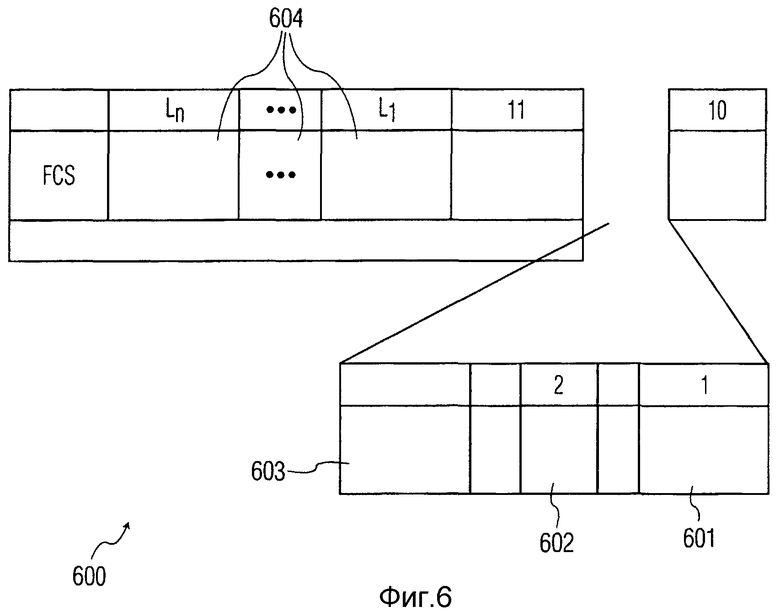
В предпочтительном варианте осуществления в течение BP 301 все устройства, которые находятся в активном состоянии или в стандартном режиме экономии энергии, передают свои собственные маяковые сигналы 103. Тело кадра маяковых сигналов 103 содержит следующие поля и информационные элементы (ИЭ, IE), как показано на фиг.6:
- Число 601 временных интервалов;
- Идентификатор 602 устройства;
- Адрес 603 MAC; и
- Некоторое число информационных элементов (ИЕ, IE) 604.
Число 601 временных интервалов представляет временной интервал, в котором передается маяковый сигнал, и представляет порядок маяковых сигналов, см. число 308 временных интервалов на фиг.3. При размере поля числа временных интервалов в 8 бит, одновременно может поддерживаться 256 устройств.
ID 602 устройства является относительно коротким ID (например, 16 бит), который извлекается, например, из 48 бит (или 64 бит) адреса MAC устройства (или выбирается случайно) и имеет цель экономии издержек, когда адресуется устройство.
Адрес 603 MAC является полным адресом MAC устройства из 48 бит (или 64 бит).
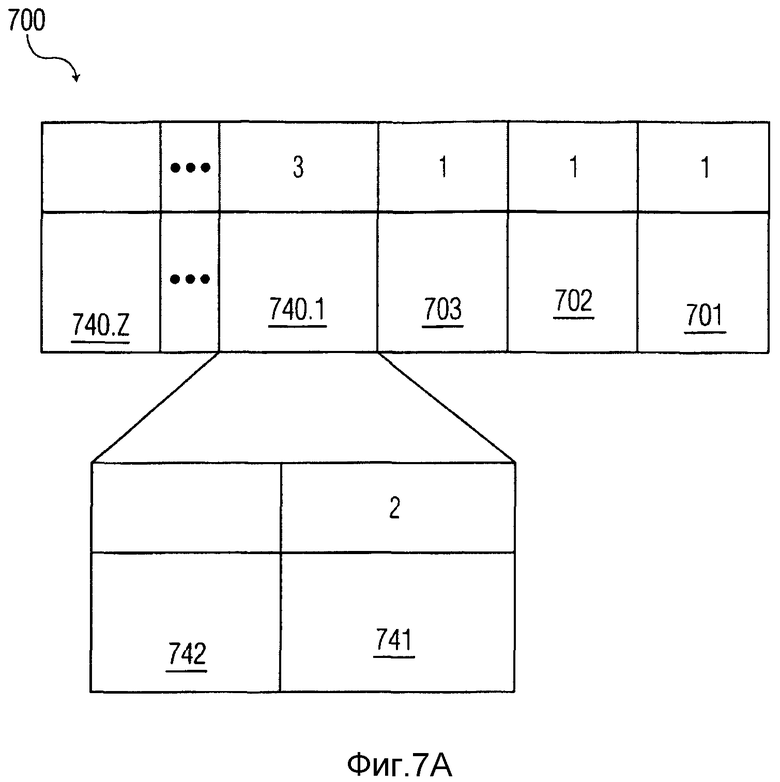
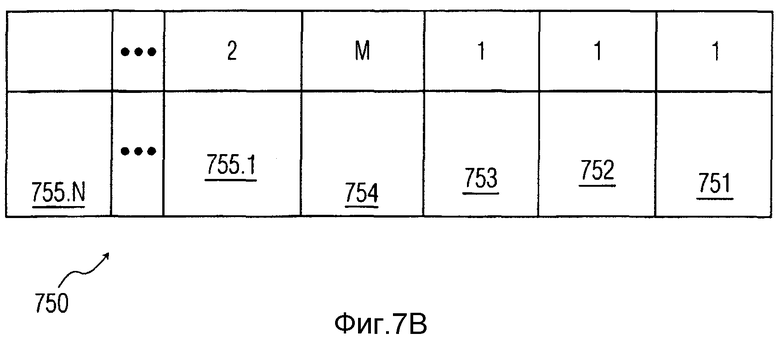
Информационные элементы (IE) 604 могут быть различных типов. Тип информационного элемента определяется идентификатором (ID) 701 информационного элемента. Только информационный элемент 700 занятости периода маякового сигнала (ИЭЗПМС, BPOIE) описывается более подробно в этом изобретении, см. фиг.7А и 7В. Несколько альтернативных форматов BPOIE возможны без затрагивания сущности настоящего изобретения. В первой альтернативе, показанной на фиг.7А, BPOIE 700 содержит список полей 740 информации о временных интервалах принятых кадров 103 маяковых сигналов других устройств в одной и той же группе устройств оповещения. Каждый элемент 740 списка BPOIE 700 включает в себя число (положение) 742 временных интервалов маяковых сигналов, используемых этими устройствами в одинаковые BP, и короткий ID 741 устройства, которое отправляет кадр маякового сигнала в этот временной интервал 204 маяковых сигналов. Эта информация может использоваться для обнаружения коллизий маяковых сигналов. BPOIE 700 требуется в каждом кадре 103 маяковых сигналов, потому что другие устройства должны быть проинформированы о том, успешно ли принят их собственный кадр маяковых сигналов или случилась коллизия маяковых сигналов. Последнее может соответствовать тому факту, что два устройства случайным образом выбрали одинаковое положение маяковых сигналов в BP 301 или соответствовать проблеме скрытого терминала в сценарии ячеистой сети. В последнем сценарии устройство может принимать два кадра 103 маяковых сигналов от различных устройств при одинаковом положении в BP 301, если эти два других устройства не могут слышать друг друга или быть осведомлены о положении маяковых сигналов другого устройства. Длина 703 BP является длиной BP, измеренной во временных интервалах 303 маяковых сигналов.
Во второй альтернативе, показанной на фиг.7В, BPOIE 750 содержит карту бит 754, в которой один или несколько бит на временной интервал маяковых сигналов указывает, например, занят ли или нет соответствующий временной интервал. За картой бит следует список DEVID (идентификаторов устройств) 755 устройств, которые занимают временные интервалы в карте бит. Подобно первому варианту осуществления эта информация может использоваться для определения коллизий маяковых сигналов. Длина 753 BP снова является длиной BP, измеренной во временных интервалах 303 маяковых сигналов.
В настоящем изобретении устройства создают BP динамической длины, которая может динамически расширяться или сужаться. Каждое устройство поддерживает свою собственную длину BP. Другие устройства отслеживают, что устройство расширило или сузило BP, посредством нового значения длины BP в маяковом сигнале. Для избежания коллизий маяковых сигналов и сигналов данных устройство выбирает достаточно большую длину BP для охвата по меньшей мере последнего занятого временного интервала маяковых сигналов того, который устройство наблюдало в предыдущем суперкадре. Расширение BP может быть результатом отправки устройством маякового сигнала во временном интервале маяковых сигналов после ранее занятого последнего временного интервала маякового сигнала в BP. BP не может расширяться свыше заранее определенной максимальной длины, которая обеспечивает верхнюю границу максимального числа устройств на BP. Сужение BP может выполняться, например, если устройства остановили передачу маяковых сигналов или сдвинули их положения, в результате чего появились дыры, например пустые временные интервалы маяковых сигналов, в BP. Целью настоящего изобретения является адаптация размера BP к числу занятых временных интервалов маяковых сигналов, т.е. устройств, активных в BP.
Есть множество альтернатив, которые определяют, как устройства выбирают временной интервал маяковых сигналов, когда присоединяются к существующим в BP. Общий принцип в том, что устройство никогда не выберет временной интервал маяковых сигналов, который уже занят другим устройством. Присоединяющееся устройство определяет, что временной интервал маяковых сигналов занят, посредством сканирования временного интервала маяковых сигналов, а также посредством декодирования BPOIE других маяковых сигналов и нахождения информации, по которой занимаются временные интервалы маяковых сигналов.
В предпочтительном варианте осуществления присоединяющееся устройство соединения выбирает временной интервал маяковых сигналов после последнего занятого временного интервала маяковых сигналов, например, посредством выбора первого свободного временного интервала или посредством случайного выбора временного интервала в окне свободных временных интервалов.
В альтернативе присоединяющееся устройство выбирает любой свободный временной интервал, который может быть свободным временным интервалом в середине BP.
В другой альтернативе присоединяющемуся устройству соединения только разрешается выбрать временной интервал среди некоторого числа временных интервалов для специальных целей, например, в начале BP.
Возможны комбинации этих альтернатив, например, присоединяющееся устройство выбирает временной интервал после последнего занятого временного интервала и дополнительно передает маяковый сигнал для заранее заданного числа суперкадров во временном интервале для специальных целей для указания, что новое устройство присоединилось к сети. Или устройство сначала передает маяковый сигнал во временной интервал для специальных целей для заранее заданного числа суперкадров и затем перераспределяет эти маяковые сигналы в их постоянные временные интервалы в конце или в середине BP.
Каждое устройство поддерживает карту 505 бит для сохранения информации о занятости временных интервалов 204 маяковых сигналов и связанных ID устройств (DEVID) в этой группе устройств маякового сигнала. Временной интервал 204 маяковых сигналов помечается в качестве занятого в карте 505 бит, когда
а) принимается кадр маяковых сигналов 103 в течение этого временного интервала 204 маяковых сигналов; или
b) временной интервал 204 маяковых сигналов включается в поле 740 информации о временном интервале маяковых сигналов, соответственно маркированном как занятый в карте 753 бит временных интервалов маяковых сигналов BPOIE 700, принятых из устройства в той же группе устройств маякового сигнала.
Временной интервал 303 маяковых сигналов изменяется из занятого в незанятый в карте 505 бит, когда
а) маяковый сигнал 103 не был принят во временном интервале в течение mМаксимальныхПотеренныхМаяковыхСигналов последовательных суперкадров; и
b) информация о временном интервале для этого временного интервала маяковых сигналов не включена соответственно соответствующий бит в карте бит временных интервалов маяковых сигналов не установлен в BPOIE 700, принятом от любого устройства в одной и той же группе устройств оповещения в течение mМаксимальныхПотерянныхМаяковыхСигналов последовательных суперкадров.
Устройство определяет, что его маяковый сигнал имеет коллизию с другим маяковым сигналом, когда различные ID устройств включены в его собственные временные интервалы маяковых сигналов в BPOIE маякового сигнала, который был принят. После того как была обнаружена коллизия маяковых сигналов, устройство сменяет свой временной интервал маяковых сигналов (детерминистически или с некоторой вероятностью). По этой причине коллизия маяковых сигналов очень похожа на случай присоединения устройства; поскольку доступны одинаковые альтернативы или выбор нового временного интервала маяковых сигналов:
- устройство выбирает временной интервал маяковых сигналов после последнего занятого временного интервала маяковых сигналов, т.е. первый свободный временной интервал или случайный временной интервал в окне (на отрезке) свободных временных интервалов;
- устройство выбирает любой свободный временной интервал, который может быть, например, свободным временным интервалом в середине BP, который был освобожден другим устройством;
- устройство выбирает временной интервал среди некоторого числа временных интервалов для специальных целей, т.е. в начале BP; и
- устройство выбирает временной интервал в соответствии с комбинацией предыдущих правил, т.е. выбирается временной интервал после последнего занятого временного интервала и дополнительно передает маяковый сигнал для некоторого числа суперкадров во временном интервале для специальных целей, или сначала передает маяковый сигнал во временном интервале для специальных целей для некоторого числа суперкадров и затем переходит к постоянному временному интервалу в конце или в середине BP.
До переназначения временного интервала устройство может оповещать о переназначении маякового сигнала.
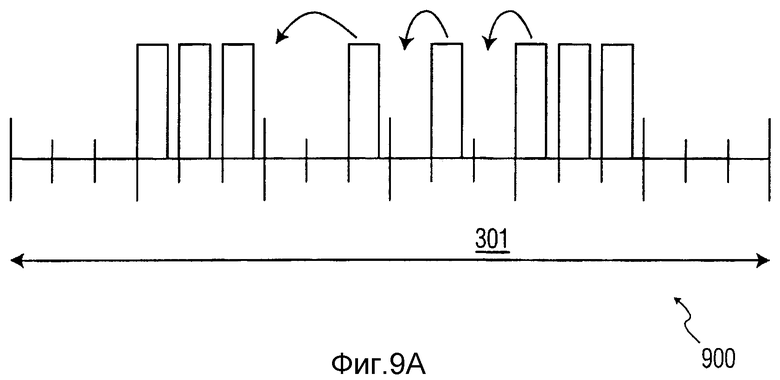
Постоянное и автоматическое сужение динамического периода маяковых сигналов является необходимым для избежания ситуации, в которой временные интервалы 204, которые были освобождены, никогда вновь не занимаются и размер BP 101 постоянно увеличивается. Устройства, оповещающие (сигнализирующие) в BP, должны оставить свой текущий временной интервал маякового сигнала и перейти на другой временной интервал для достижения снижения длины BP. Устройство переназначает свой маяковый сигнал на следующий свободный временной интервал маяковых сигналов в направлении начала BP, как показано на фиг.9А. Временные интервалы для специальных целей могут не рассматриваться в качестве свободных для операции сужения. Устройствам также разрешается переходить через маяковые сигналы устройств, которые не готовы или не способны к переходу к свободному временному интервалу. За определенное число шагов BP будет сжат.
В другом аспекте устройство переназначает (сдвигает) маяковый сигнал в любой свободный временной интервал, который устройство обнаружило в направлении начала BP.
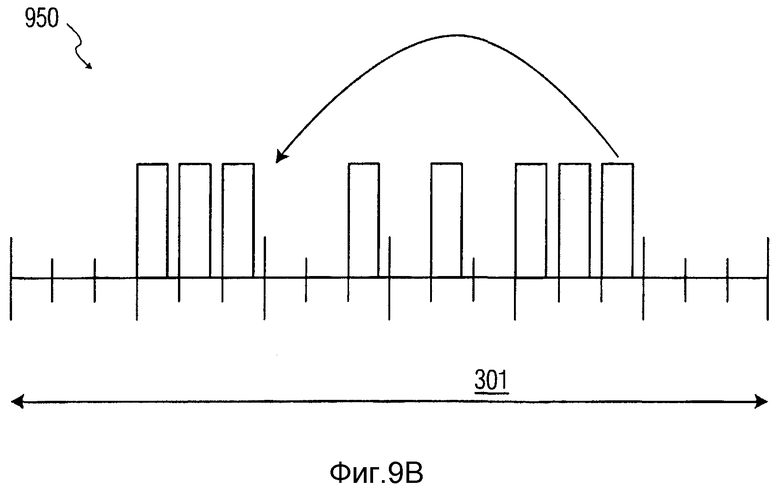
В другом аспекте только единственному устройству разрешается сдвиг в один этап, которое может быть, например, устройством, которое передает последний маяковый сигнал в BP. Устройство может проверять, передает ли оно последний маяковый сигнал в BP, посредством сканирования всех маяковых сигналов своих соседей и посредством оценки информации BPOIE в маяковых сигналах соседей. Это единственное устройство затем переходит к конкретному временному интервалу, такому как первый свободный временной интервал в BP (который не является временным интервалом для специальных целей), как показано на фиг.9В. После нескольких таких сдвигов BP сжимается.
Все альтернативы могут комбинироваться с устройствами переключения, передающими маяковый сигнал во временном интервале для специальных целей перед или параллельно передаче маякового сигнала в новом временном интервале. Альтернативно устройство переключения передает два маякового сигнала: один в старом и один в новом положении маякового сигнала параллельно для заранее заданного числа суперкадров.
Во всех альтернативах устройство может объявлять о сдвиге маякового сигнала до или параллельно с выполнением смены.
Хотя показаны и описаны предпочтительные варианты осуществления настоящего изобретения, специалисту понятно, что кадр управления, архитектура устройства и способы, как описано здесь, являются иллюстративными и различные изменения и модификации могут быть сделаны и эквиваленты могут подходить для соответствующих замен элементов без отхода от истинного объема настоящего изобретения. Кроме того, многие модификации могут быть сделаны для адаптации раскрытия настоящего изобретения для конкретных ситуаций без отхода от главного объема изобретения. Это означает, что настоящее изобретение не может ограничиваться конкретными вариантами осуществления, описанными как наилучший способ, предполагающий выполнение настоящего изобретения, но что настоящее изобретение включает в себя все варианты осуществления, попадающие в объем приложенной формулы.
Настоящее изобретение относится к протоколу управления доступом к ультраширокодиапазонной среде. Технический результат - уменьшение динамического неэффективного использования среды, случающегося при фиксированном периоде маякового сигнала, разрешая в то же время большому максимальному числу устройств участвовать в сети. Для этого система, устройство и способ обеспечиваются для децентрализованного управления доступом к среде, содержащие периодические передачи маяковых сигналов всеми активными устройствами во временных интервалах маяковых сигналов, группирование таких временных интервалов в по меньшей мере один непрерывный динамический период маяковых сигналов и расширение или сжатие этого по меньшей мере одного непрерывного динамического периода маяковых сигналов в зависимости от числа занятых временных интервалов маяковых сигналов. Динамический период маяковых сигналов адаптируется для присоединения и покидания устройствами сети, а также при коллизиях кадров маяковых сигналов в среде. 6 н. и 55 з.п. ф-лы, 11 ил.
1. Способ децентрализованного управления доступом к среде в сети передачи, включающей в себя по меньшей мере одно беспроводное устройство (401), содержащий этапы, на которых
разделяют время на последовательность из по меньшей мере одного суперкадра (100), содержащего по меньшей мере один динамический период (301) маяковых сигналов и по меньшей мере один период (102) передачи данных, при этом упомянутый динамический период (301) маяковых сигналов имеет заранее заданную максимальную длину и включает в себя переменное множество временных интервалов (204) маяковых сигналов;
сигнализируют, посредством каждого устройства (401) в активном состоянии, посредством передачи кадра (600) маяковых сигналов в однозначно определенном одном из упомянутого множества временных интервалов (204) маяковых сигналов, при этом упомянутый кадр (600) маяковых сигналов включает в себя информацию (604), относящуюся к идентификации и положению устройств; и
сужают динамический период (301) маяковых сигналов посредством перехода устройств, сигнализирующих в текущий временной интервал, на другой временной интервал в направлении начала периода (301) маяковых сигналов, с использованием информации (604), относящейся к идентификации и положению устройств.
2. Способ по п.1, дополнительно содержащий этап динамического расширения или сокращения длины упомянутого динамического периода (301) маяковых сигналов посредством множества N≥1 временных интервалов (204) маяковых сигналов в упомянутом заранее заданном максимальном размере в соответствии с числом занятых временных интервалов маяковых сигналов.
3. Способ по п.2, дополнительно содержащий этапы, на которых
принимают каждым устройством (401) передачи маяковых сигналов маяковые сигналы (600), переданные другими устройствами (401) в зоне радиодействия устройства (401) передачи маяковых сигналов; и
каждое устройство (401) передачи маяковых сигналов автоматически определяет длину упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов, в котором оно передает маяковые сигналы на основании принятых маяковых сигналов (600) от других устройств (401) и информации (604), включенной в упомянутые принятые маяковые сигналы.
4. Способ по п.3, дополнительно содержащий этапы, на которых
определяют последний занятый временной интервал маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маякового сигнала на основании маяковых сигналов (600), принятых от других устройств (401), и информации (604), включенной в упомянутые принятые маяковые сигналы (600);
присоединяющееся устройство (401) передает свой маяковый сигнал (600) в свободном временном интервале (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301);
определяют посредством устройства (401), что маяковый сигнал (600) имел коллизию с маяковым сигналом (600) другого устройства (401); и
когда устройство (401) определило, что его маяковый сигнал (600) имел коллизию с маяковым сигналом (600) другого устройства (401), упомянутое устройство (401), выполняющее определение, затем передает свой маяковый сигнал (600) в свободном временном интервале (204) маяковых сигналов динамического периода (301) маяковых сигналов.
5. Способ по п.4, в котором упомянутый свободный временной интервал (204) маяковых сигналов является первым свободным временным интервалом маяковых сигналов после последнего занятого временного интервала маяковых сигналов.
6. Способ по п.4, в котором упомянутый свободный временной интервал (204) маяковых сигналов является случайно выбранным свободным временным интервалом в заранее заданном числе временных интервалов маяковых сигналов после последнего занятого временного интервала маяковых сигналов.
7. Способ по п.1, дополнительно содержащий этапы, на которых
резервируют каждый из заранее заданного числа временных интервалов (204) маяковых сигналов в качестве временного интервала (302) (303) для специальных целей;
определяют по меньшей мере один свободный временной интервал (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств (401), и информации (604), включенной в упомянутые принятые маяковые сигналы (600),
присоединяющееся устройство (401) передает свой маяковый сигнал (600) в любом ином свободном временном интервале (204) маяковых сигналов, чем свободный временной интервал маяковых сигналов, который является временным интервалом (302) (303) для специальных целей;
определяют посредством устройства (401), что его маяковый сигнал имел коллизию с маяковым сигналом (600) другого устройства (401); и
когда устройство (401) определило, что его маяковый сигнал (600) имел коллизию с маяковым сигналом (600) другого устройства (401), упомянутое устройство (401), выполняющее определение, затем передает свой маяковый сигнал (600) в любом ином свободном временном интервале (204) маяковых сигналов, чем свободный временной интервал маяковых сигналов, который является временным интервалом (302) (303) для специальных целей.
8. Способ по п.2, дополнительно содержащий этапы, на которых резервируют каждый из заранее заданного числа временных интервалов (204) маяковых сигналов в качестве временного интервала (302) (303) для специальных целей;
определяют по меньшей мере один свободный временной интервал маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств (401), и информации (604), включенной в упомянутые принятые маяковые сигналы (600),
присоединяющееся устройство (401) передает свой маяковый сигнал (600) в любом ином свободном временном интервале (204) маяковых сигналов, чем свободный временной интервал маяковых сигналов, который является временным интервалом (302) (303) для специальных целей;
определяют посредством устройства, что его маяковый сигнал (600) имел коллизию с маяковым сигналом (600) другого устройства (401); и
когда устройство (401) определило, что его маяковый сигнал (600) имел коллизию с маяковым сигналом (600) другого устройства (401), упомянутое устройство (401), выполняющее определение, затем передает свой маяковый сигнал (600) в любом ином свободном временном интервале (204) маяковых сигналов, чем свободный временной интервал маяковых сигналов, который является временным интервалом (302) (303) для специальных целей.
9. Способ по п.3, дополнительно содержащий этапы, на которых
резервируют каждый из заранее заданного числа временных интервалов (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода маяковых сигналов в качестве временного интервала (302) (303) для специальных целей;
определяют по меньшей мере один свободный временной интервал (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании сигналов (600) оповещения, принятых от других устройств (401), и информации (604), включенной в упомянутые принятые маяковые сигналы (600);
присоединяющее устройство (401) передает свой маяковый сигнал (600) в любом ином свободном временном интервале (204) маяковых сигналов, чем свободный временной интервал маяковых сигналов, который является временным интервалом (302) (303) для специальных целей;
определяют посредством устройства (401), что его маяковый сигнал имел коллизию с маяковым сигналом (600) другого устройства (401); и
когда устройство (401) определило, что его маяковый сигнал (600) оповещения имел коллизию с маяковым сигналом (600) другого устройства (401), упомянутое устройство (401), выполняющее определение, затем передает свой маяковый сигнал (600) в любом ином свободном временном интервале (204) маяковых сигналов, чем свободный временной интервал маяковых сигналов, который является временным интервалом (302) (303) для специальных целей.
10. Способ по п.1, дополнительно содержащий этапы, на которых
резервируют каждый из заранее заданного числа временных интервалов (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов в качестве временного интервала (302) (303) для специальных целей;
определяют по меньшей мере один свободный временной интервал (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств (401), и информации (604), включенной в упомянутые принятые маяковые сигналы;
присоединяющееся устройство (401) передает свой маяковый сигнал (600) в любом свободном временном интервале (204) маяковых сигналов, который является временным интервалом (302) (303) для специальных целей;
определяют посредством устройства (401), что его маяковый сигнал (600) имел коллизию с маяковым сигналом (600) другого устройства (401); и
когда устройство (401) определило, что его маяковый сигнал (600) имел коллизию с маяковым сигналом (600) другого устройства (401), упомянутое устройство (401), выполняющее определение, затем передает свой маяковый сигнал (600) в любом свободном временном интервале (204) маяковых сигналов, который является временным интервалом (302) (303) для специальных целей.
11. Способ по п.2, дополнительно содержащий этапы, на которых
резервируют каждый из заранее заданного числа временных интервалов (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов в качестве временного интервала (302) (303) для специальных целей;
определяют по меньшей мере один свободный временной интервал (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств (401), и информации (604), включенной в упомянутые принятые маяковые сигналы;
присоединяющееся устройство (401) передает свой маяковый сигнал (600) в любом свободном временном интервале (204) маяковых сигналов, который является временным интервалом (302) (303) для специальных целей;
определяют посредством устройства (401), что его маяковый сигнал (600) имел коллизию с маяковым сигналом (600) другого устройства (401); и
когда устройство (401) определило, что его маяковый сигнал (600) имел коллизию с маяковым сигналом (600) другого устройства (401), упомянутое устройство (401), выполняющее определение, затем передает свой маяковый сигнал (600) в любом свободном временном интервале (204) маяковых сигналов, который является временным интервалом (302) (303) для специальных целей.
12. Способ по п.3, дополнительно содержащий этапы, на которых
резервируют каждый из заранее заданного числа временных интервалов (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов в качестве временного интервала (302) (303) для специальных целей;
определяют по меньшей мере один свободный временной интервал (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств (401), и информации (604), включенной в упомянутые принятые маяковые сигналы;
присоединяющееся устройство (401) передает свой маяковый сигнал (600) в любом свободном временном интервале (204) маяковых сигналов, который является временным интервалом (302) (303) для специальных целей;
определяют посредством устройства (401), что его маяковый сигнал (600) имел коллизию с маяковым сигналом (600) другого устройства (401); и
когда устройство (401) определило, что его маяковый сигнал имел коллизию с маяковым сигналом (600) другого устройства (401), упомянутое устройство (401), выполняющее определение, затем передает свой маяковый сигнал (600) в любом свободном временном интервале (204) маяковых сигналов, который является временным интервалом (302) (303) для специальных целей.
13. Способ по п.10, дополнительно содержащий этапы, на которых присоединяющееся устройство (401) выполняет этапы, на которых
а. передает свой маяковый сигнал (600) во временном интервале
(302) (303) для специальных целей на протяжении по меньшей мере одного суперкадра (100), и
b. затем сдвигает свой маяковый сигнал (600) в другой свободный временной интервал (204) маяковых сигналов в по меньшей мере одном непрерывном динамическом периоде (301) маяковых сигналов;
и устройство (401), выполняющее определение, выполняет этапы, на которых
а. передает свой маяковый сигнал (600) во временном интервале (302) (303) для специальных целей на протяжении по меньшей мере одного суперкадра (100), и
b. затем сдвигает свой маяковый сигнал (600) в другой свободный временной интервал (204) маяковых сигналов в по меньшей мере одном непрерывном динамическом периоде (301) маяковых сигналов.
14. Способ по п.11, дополнительно содержащий этапы, на которых присоединяющееся устройство (401) выполняет этапы, на которых
а. передает свой маяковый сигнал (600) во временном интервале (302) (303) для специальных целей на протяжении по меньшей мере одного суперкадра (100), и
b. затем сдвигает свой маяковый сигнал (600) в другой свободный временной интервал (204) маяковых сигналов в по меньшей мере одном непрерывном динамическом периоде (301) маяковых сигналов;
и устройство (401), выполняющее определение, выполняет этапы, на которых
а. передает свой маяковый сигнал (600) во временном интервале (302) (303) для специальных целей на протяжении по меньшей мере одного суперкадра (100), и
b. затем сдвигает свой маяковый сигнал (600) в другой свободный временной интервал (204) маяковых сигналов в по меньшей мере одном непрерывном динамическом периоде (301) маяковых сигналов.
15. Способ по п.12, дополнительно содержащий этапы, на которых присоединяющееся устройство (401) выполняет этапы, на которых
а. передает свой маяковый сигнал (600) во временном интервале (302) (303) для специальных целей на протяжении по меньшей мере одного суперкадра (100), и
b. затем сдвигает свой маяковый сигнал (600) в другой свободный временной интервал (204) маяковых сигналов в по меньшей мере одном непрерывном динамическом периоде (301) маяковых сигналов;
и устройство (401), выполняющее определение, выполняет этапы, на которых
а. передает свой маяковый сигнал (600) во временном интервале (302) (303) для конкретных целей на протяжении по меньшей мере одного суперкадра(100), и
b. затем сдвигает свой маяковый сигнал (600) в другой свободный временной интервал (204) маяковых сигналов в по меньшей мере одном непрерывном динамическом периоде (301) маяковых сигналов.
16. Способ по п.1, дополнительно содержащий этапы, на которых резервируют каждый из заранее заданного числа временных интервалов (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов в качестве временного интервала (302) (303) для специальных целей;
определяют по меньшей мере один свободный временной интервал (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств, и информации (604), включенной в упомянутые принятые маяковые сигналы; и
присоединяющееся устройство (401) одновременно передает свой маяковый сигнал (600) в определенном по меньшей мере одном свободном временном интервале (204) маяковых сигналов и во временном интервале (302) (303) для специальных целей на протяжении заранее заданного числа суперкадров (100).
17. Способ по п.2, дополнительно содержащий этапы, на которых
резервируют каждый из заранее заданного числа временных интервалов (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов в качестве временного интервала (302) (303) для специальных целей;
определяют по меньшей мере один свободный временной интервал (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств, и информации (604), включенной в упомянутые принятые маяковые сигналы; и
присоединяющееся устройство (401) одновременно передает свой маяковый сигнал (600) в определенном по меньшей мере одном свободном временном интервале (204) маяковых сигналов и временном интервале (302) (303) для специальных целей на протяжении заранее заданного числа суперкадров (100).
18. Способ по п.3, дополнительно содержащий этапы, на которых
резервируют каждый из заранее заданного числа временных интервалов (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов в качестве временного интервала (302) (303) для специальных целей;
определяют по меньшей мере один свободный временной интервал (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств, и информации (604), включенной в упомянутые принятые маяковые сигналы; и
присоединяющееся устройство (401) одновременно передает свой маяковый сигнал (600) в определенном по меньшей мере одном свободном временном интервале (204) маяковых сигналов и временном интервале (302) (303) для специальных целей на протяжении заранее заданного числа суперкадров(100).
19. Способ по п.1, дополнительно содержащий этапы, на которых
определяют по меньшей мере один свободный временной интервал (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств (401), и информации (604), включенной в упомянутые принятые маяковые сигналы (600);
определяют с помощью устройства (400), что его маяковый сигнал (600) имел коллизию с маяковым сигналом (600) другого устройства (401); и
когда устройство (401) определило, что его маяковый сигнал (600) оповещения имел коллизию с маяковым сигналом (600) другого устройства (401), упомянутое устройство (401), выполняющее определение, впоследствии выполняет этапы, на которых
а. одновременно передает свой маяковый сигнал (600) в своем предыдущем временном интервале маяковых сигналов и в одном из определенных по меньшей мере одного свободного временного интервала (204) маяковых сигналов на протяжении заранее заданного числа суперкадров, и
b. только после упомянутой одновременной передачи прекращает передачу маякового сигнала в своем предыдущем временном интервале маяковых сигналов.
20. Способ по п.2, дополнительно содержащий этапы, на которых
определяют по меньшей мере один свободный временной интервал (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств (401), и информации (604), включенной в упомянутые принятые маяковые сигналы (600);
определяют посредством устройства (401), что его маяковый сигнал (600) имел коллизию с маяковым сигналом (600) другого устройства (401); и
когда устройство (401) определило, что его маяковый сигнал (600) имел коллизию с маяковым сигналом (600) другого устройства (401), упомянутое устройство (401), выполняющее определение, затем выполняет этапы, на которых
а. одновременно передает свой маяковый сигнал (600) в своем предыдущем временном интервале маяковых сигналов и в одном из определенных по меньшей мере одного свободного временного интервала (204) маяковых сигналов на протяжении заранее заданного числа суперкадров, и
b. только после упомянутой одновременной передачи прекращает передачу маякового сигнала в своем предыдущем временном интервале маяковых сигналов.
21. Способ по п.3, дополнительно содержащий этапы, на которых
определяют по меньшей мере один свободный временной интервал (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств (401), и информации (604), включенной в упомянутые принятые маяковые сигналы (600);
определяют с помощью устройства (401), что его маяковый сигнал (600) имел коллизию с маяковым сигналом (600) другого устройства (401); и
когда устройство (401) определило, что его маяковый сигнал (600) имел коллизию с маяковым сигналом (600) другого устройства (401), упомянутое устройство (401), выполняющее определение, впоследствии выполняет этапы, на которых
а. одновременно передает свой маяковый сигнал (600) в своем предыдущем временном интервале маяковых сигналов и в одном из определенных по меньшей мере одного свободного временного интервала (204) маяковых сигналов на протяжении заранее заданного числа суперкадров, и
b. только после упомянутой одновременной передачи прекращает передачу маякового сигнала в своем предыдущем временном интервале маяковых сигналов.
22. Способ по п.1, дополнительно содержащий этапы, на которых
определяют следующий свободный временной интервал (204) маяковых сигналов в направлении начала упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств (600), и информации (604), включенной в упомянутые принятые маяковые сигналы (600); и
устройство (401), которое уже передало по меньшей мере один маяковый сигнал (600), сдвигает свой маяковый сигнал из своего предыдущего временного интервала маяковых сигналов в определенный следующий временной интервал (204) маяковых сигналов.
23. Способ по п.2, дополнительно содержащий этапы, на которых
определяют следующий свободный временной интервал (204) маяковых сигналов в направлении начала упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств, и информации (604), включенной в упомянутые принятые маяковые сигналы (600); и
устройство (401), которое уже передало по меньшей мере один маяковый сигнал (600), сдвигает свой маяковый сигнал из своего предыдущего временного интервала маяковых сигналов в определенный следующий свободный временной интервал (204) маяковых сигналов.
24. Способ по п.3, дополнительно содержащий этапы, на которых определяют следующий свободный временной интервал (204) маяковых сигналов в направлении начала упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств, и информации (604), включенной в упомянутые принятые маяковые сигналы (600); и
устройство (401), которое уже передало по меньшей мере один маяковый сигнал (600), сдвигает свой маяковый сигнал из своего предыдущего временного интервала маяковых сигналов в определенный следующий временный интервал (204) маяковых сигналов.
25. Способ по п.22, в котором упомянутый этап определения дополнительно содержит переход через любой занятый временной интервал (204) маяковых сигналов, который является одним из неспособных к сдвигу и нежелательных для сдвига.
26. Способ по п.23, в котором упомянутый этап определения дополнительно содержит переход через любой занятый временной интервал (204) маяковых сигналов, который является одним из неспособных к сдвигу и нежелательных для сдвига.
27. Способ по п.24, в котором упомянутый этап определения дополнительно содержит переход через любой занятый временной интервал (204) маяковых сигналов, который является одним из неспособных к сдвигу и нежелательных для сдвига.
28. Способ по п.1, дополнительно содержащий этапы, на которых
резервируют каждый из заранее заданного числа временных интервалов (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов в качестве временного интервала (302) (303) для специальных целей;
определяют по меньшей мере один свободный временной интервал (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании временного интервала, не являющегося временным интервалом (302) (303) для специальных целей, и маяковых сигналов (600), принятых от других устройств (401), и информации (604), включенной в упомянутые принятые маяковые сигналы (600); и
сигнализирующее устройство сдвигает свой маяковый сигнал (600) в определенный по меньшей мере один свободный временной интервал (204) маяковых сигналов.
29. Способ по п.2, дополнительно содержащий этапы, на которых
резервируют каждый из заранее заданного числа временных интервалов (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов в качестве временного интервала (302) (303) маяковых сигналов для специальных целей;
определяют по меньшей мере один свободный временной интервал (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании временного интервала, не являющегося временным интервалом (302) (303) для специальных целей, и маяковых сигналов (600), принятых от других устройств (401), и информации (604), включенной в упомянутые принятые маяковые сигналы (600); и
сигнализирующее устройство сдвигает свой маяковый сигнал (600) в определенный по меньшей мере один свободный временной интервал (204) маяковых сигналов.
30. Способ по п.3, дополнительно содержащий этапы, на которых
резервируют каждый из заранее заданного числа временных интервалов (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов в качестве временного интервала (302) (303) маяковых сигналов для специальных целей;
определяют по меньшей мере один свободный временной интервал (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании временного интервала, не являющегося временным интервалом (302) (303) для специальных целей, и маяковых сигналов (600), принятых от других устройств (401), и информации (604), включенной в упомянутые принятые маяковые сигналы (600); и
сигнализирующее устройство сдвигает свой маяковый сигнал (600) в определенный по меньшей мере один свободный временной интервал (204) маяковых сигналов.
31. Способ по п.1, дополнительно содержащий этапы, на которых
определяют по меньшей мере один свободный временной интервал (204) упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств (401), и информации (604), включенной в упомянутые принятые маяковые сигналы (600); и
устройство (401), которое уже передало по меньшей мере один маяковый сигнал (600), выполняет этапы, на которых
а. определяет, что временной интервал (204) маяковых сигналов устройства является последним временным интервалом маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов, на основании маяковых сигналов (600), принятых от других устройств (401), и информации (604), включенной в упомянутые принятые маяковые сигналы (600); и
b. когда устройство (401) определяет, что его временной интервал (204) маяковых сигналов является последним временным интервалом маяковых сигналов, то сдвигает свой маяковый сигнал (600) из предыдущего временного интервала маяковых сигналов в определенный по меньшей мере один свободный временной интервал (204) маяковых сигналов.
32. Способ по п.2, дополнительно содержащий этапы, на которых
определяют по меньшей мере один свободный временной интервал (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств (401), и информации (604), включенной в упомянутые принятые маяковые сигналы (600); и
устройство (401), которое уже передало по меньшей мере один маяковый сигнал (600), выполняет этапы, на которых
а. определяет, что временной интервал (204) маяковых сигналов устройства является последним временным интервалом маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств (401), и информации (604), включенной в упомянутые принятые маяковые сигналы (600); и
b. когда устройство (401) определяет, что его временной интервал (204) маяковых сигналов является последним временным интервалом маяковых сигналов, то сдвигает свой маяковый сигнал (600) из предыдущего временного интервала маяковых сигналов в определенный по меньшей мере один свободный временной интервал (204) маяковых сигналов.
33. Способ по п.3, дополнительно содержащий этапы, на которых
определяют по меньшей мере один свободный временной интервал (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств (401), и информации (604), включенной в упомянутые принятые маяковые сигналы (600); и
устройство, которое уже передало по меньшей мере один маяковый сигнал (600), выполняет этапы, на которых
а. определяет, что временной интервал (204) маяковых сигналов устройства является последним временным интервалом маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств (401), и информации (604), включенной в упомянутые принятые маяковые сигналы (600); и
b. когда устройство (401) определяет, что его временной интервал (204) маяковых сигналов является последним временным интервалом маяковых сигналов, то сдвигает свой маяковый сигнал (600) из его предыдущего временного интервала маяковых сигналов в определенной по меньшей мере один свободный временной интервал (204) маяковых сигналов.
34. Способ по п.28, в котором этап определения дополнительно содержит этап определения упомянутого по меньшей мере одного свободного временного интервала (204) маяковых сигналов в качестве первого временного интервала маяковых сигналов в по меньшей мере одном непрерывном динамическом периоде (301) маяковых сигналов после начала по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов.
35. Способ по п.29, в котором этап определения дополнительно содержит этап определения упомянутого по меньшей мере одного свободного временного интервала (204) маяковых сигналов в качестве первого временного интервала маяковых сигналов в по меньшей мере одном непрерывном динамическом периоде (301) маяковых сигналов после начала по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов.
36. Способ по п.30, в котором этап определения дополнительно содержит этап определения упомянутого по меньшей мере одного свободного временного интервала (204) маяковых сигналов в качестве первого временного интервала маяковых сигналов в по меньшей мере одном непрерывном динамическом периоде (301) маяковых сигналов после начала по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов.
37. Способ по п.22, в котором упомянутый этап сдвига дополнительно содержит этап одновременной передачи своего маякового сигнала (600) в своем предыдущем временном интервале маяковых сигналов и в определенном по меньшей мере одном свободном временном интервале маяковых сигналов на протяжении заранее заданного числа суперкадров.
38. Способ по п.25, в котором упомянутый этап сдвига дополнительно содержит этап одновременной передачи своего маякового сигнала (600) в своем предыдущем временном интервале маяковых сигналов и в определенном по меньшей мере одном свободном временном интервале маяковых сигналов на протяжении заранее заданного числа суперкадров.
39. Способ по п.28, в котором упомянутый этап сдвига дополнительно содержит этап одновременной передачи своего маякового сигнала (600) в своем предыдущем временном интервале маяковых сигналов и в определенном по меньшей мере одном свободном временном интервале маяковых сигналов на протяжении заранее заданного числа суперкадров.
40. Способ по п.31, в котором упомянутый этап сдвига дополнительно содержит этап одновременной передачи своего маякового сигнала (600) в своем предыдущем временном интервале маяковых сигналов и в определенном по меньшей мере одном свободном временном интервале маяковых сигналов на протяжении заранее заданного числа суперкадров.
41. Способ по п.34, в котором упомянутый этап сдвига дополнительно содержит этап одновременной передачи своего маякового сигнала (600) в своем предыдущем временном интервале маяковых сигналов и в определенном по меньшей мере одном свободном временном интервале маяковых сигналов на протяжении заранее заданного числа суперкадров.
42. Способ по п.22, дополнительно содержащий этап, предшествующий упомянутому этапу сдвига, на котором устройство выполняет этапы, на которых
резервируют каждый из заранее, заданного числа временных интервалов (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов в качестве временного интервала (302) (303) для специальных целей; и
передают маяковый сигнал (600) во временном интервале (302) (303) для специальных целей.
43. Способ по п.25, дополнительно содержащий этап, предшествующий упомянутому этапу сдвига, на котором устройство выполняет этапы, на которых
резервируют каждый из заранее заданного числа временных интервалов (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов в качестве временного интервала (302) (303) для специальных целей; и
передают маяковый сигнал (600) во временном интервале (302) (303) для специальных целей.
44. Способ по п.28, дополнительно содержащий этап, предшествующий упомянутому этапу сдвига, на котором передают маяковый сигнал во временном интервале (302) (303) для специальных целей.
45. Способ по п.31, дополнительно содержащий этап, предшествующий упомянутому этапу сдвига, на котором устройство выполняет этапы, на которых
резервируют каждый из заранее заданного числа временных интервалов (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов в качестве временного интервала (302) (303) для специальных целей; и
передают маяковый сигнал (600) во временном интервале (302) (303) для специальных целей.
46. Способ по п.34, дополнительно содержащий этап, предшествующий упомянутому этапу сдвига, на котором передают маяковый сигнал (600) во временном интервале (302) (303) для специальных целей.
47. Способ по п.22, дополнительно содержащий этапы, на которых
резервируют каждый из заранее заданного числа временных интервалов (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов в качестве временного интервала (302) (303) для специальных целей; и
одновременно передают маяковый сигнал (600) в своем предыдущем временном интервале маяковых сигналов и временном интервале (302) (303) маякового сигнала для специальных целей на протяжении заранее заданного числа суперкадров (100).
48. Способ по п.25, дополнительно содержащий этап, на котором
резервируют каждый из заранее заданного числа временных интервалов (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов в качестве временного интервала (302) (303) для специальных целей; и
одновременно передают свой маяковый сигнал (600) в своем предыдущем временном интервале маяковых сигналов и временном интервале (302) (303) для специальных целей на протяжении заранее заданного числа суперкадров (100).
49. Способ по п.28, в котором упомянутый этап сдвига дополнительно содержит этап одновременной передачи своего маякового сигнала (600) в своем предыдущем временном интервале маяковых сигналов и в зарезервированном временном интервале (302) (303) маяковых сигналов на протяжении заранее заданного числа суперкадров (100).
50. Способ по п.31, дополнительно содержащий этапы, на которых
резервируют каждый из заранее заданного числа временных интервалов (204) маяковых сигналов упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов в качестве временного интервала (302) (303) для специальных целей; и одновременно передают свой маяковый сигнал (600) в своем предыдущем временном интервале маяковых сигналов и временном интервале (302) (303) для специальных целей на протяжении заранее заданного числа суперкадров (100).
51. Способ по п.34, в котором упомянутый этап сдвига дополнительно содержит этап одновременной передачи своего маякового сигнала (600) в своем предыдущем временном интервале маяковых сигналов и в зарезервированном временном интервале (302) (303) маяковых сигналов на протяжении заранее заданного числа суперкадров.
52. Способ по п.1, дополнительно содержащий этап оповещения устройством (401) в своем маяковом сигнале (600) о длине динамического периода (703) (753) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств, и информации (604), включенной в упомянутые принятые маяковые сигналы (600).
53. Способ по п.2, дополнительно содержащий этап оповещения устройством (401) в своем маяковом сигнале (600) о длине динамического периода (703) (753) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств, и информации (604), включенной в упомянутые принятые маяковые сигналы (600).
54. Способ по п.3, дополнительно содержащий этап оповещения устройством (401) в своем маяковом сигнале (600) о длине динамического периода (703) (753) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств, и информации (604), включенной в упомянутые принятые маяковые сигналы (600).
55. Способ по п.4, дополнительно содержащий этап оповещения устройством (401) в своем маяковом сигнале (600) о длине динамического периода (703) (753) маяковых сигналов на основании маяковых сигналов (600), принятых от других устройств, и информации (604), включенной в упомянутые принятые маяковые сигналы (600).
56. Сеть (400) передачи данных, содержащая множество устройств (401), которые образуют динамические периоды (301) маяковых сигналов для передачи своих кадров (600) маяковых сигналов посредством выполнения способа децентрализованного управления доступом к среде по п.1.
57. Сеть (400) передачи данных, содержащая множество устройств (401), которые образуют динамические периоды (301) маяковых сигналов для передачи своих кадров (600) маяковых сигналов посредством выполнения способа децентрализованного управления доступом к среде по п.2.
58. Сеть (400) передачи данных, содержащая множество устройств (401), которые образуют динамические периоды (301) маяковых сигналов для передачи своих кадров (600) маяковых сигналов посредством выполнения способа децентрализованного управления доступом к среде по п.3.
59. Сеть (400) передачи данных, содержащая множество устройств (401), которые образуют динамические периоды (301) маяковых сигналов для передачи своих кадров (600) маяковых сигналов посредством выполнения способа децентрализованного управления доступом к среде по п.4.
60. Беспроводное устройство (401) связи, содержащее
антенну (507) для передачи и приема маяковых сигналов (600) через беспроводную среду (410);
приемник (502), подключенный к антенне (507) для приема маяковых сигналов (600), переданных через беспроводную среду (410);
передатчик (506), подключенный к антенне (507) для передачи маяковых сигналов (600) через беспроводную среду (401);
модуль (504) обработки маяковых сигналов для обработки отправляемых и принимаемых маяковых сигналов (600) для распределенного управления маяковой сигнализацией через среду (410);
процессор (503) для разделения времени на последовательность из по меньшей мере одного суперкадра (100), при этом каждый упомянутый суперкадр (100) имеет по меньшей мере один динамический период (301) маяковых сигналов, имеющий динамическую длину с заранее заданной верхней границей, и который включает в себя множество временных интервалов (204) маяковых сигналов, и подключен к
i. передатчику (506) и приемнику (502) для передачи и приема, соответственно, кадров (600) маяковых сигналов в течение упомянутого по меньшей мере одного динамического периода (301) маяковых сигналов по меньшей мере одного суперкадра (100),
ii. модулю (504) обработки маяковых сигналов для
а. управления форматом динамического периода маяковых сигналов и длиной (300), включая динамическое определение динамической длины периода маяковых сигналов, включение заранее заданного множества типов (204) (302) (303) временных интервалов маяковых сигналов, запись информации о занятости (505) (507) временных интервалов маяковых сигналов и выполнение смен (900) (950) временных интервалов маяковых сигналов,
b. форматирования кадров (600) маяковых сигналов для передачи, содержащей каждый из типов (204) (302) (303) временных интервалов маяковых сигналов таким образом, что кадр (600) маяковых сигналов оповещает о длине (703) (753) кадра маяковых сигналов, динамически определенного устройством, и
с. форматирования кадра (600) маяковых сигналов для передачи в по меньшей мере одном временном интервале (204) (302) (303) маяковых сигналов, который включает в себя информацию (740) (754, 755) о занятости временных интервалов маяковых сигналов и информацию (740) (754, 755) о смене временных интервалов маяковых сигналов.
61. Беспроводное устройство по п.60, в котором каждый суперкадр (100) дополнительно содержит множество временных интервалов (203) доступа к среде, расположенных между упомянутым по меньшей мере одним непрерывным динамическим периодом (301) маяковых сигналов и фазой (102) передачи данных;
дополнительно содержащее
а. карту (505) бит, оперативно связанную с упомянутым процессором (503) и выполненную с возможностью иметь по меньшей мере один бит, который соответствует временному интервалу (204) (302) (303) маякового сигнала упомянутого по меньшей мере одного непрерывного динамического периода (301) маяковых сигналов, и
b. память (508), оперативно связанную с упомянутым процессором (503) и выполненную с возможностью сохранения информации (507) о занятости временных интервалов маяковых сигналов каждого маякового сигнала (600), переданного упомянутым передатчиком (506) и принятого упомянутым приемником (502); и
упомянутый модуль (504) обработки маякового сигнала дополнительно выполнен с возможностью
а. установки и повторной установки по меньшей мере одного бита упомянутой карты (505) бит через процессор (503) в соответствии с информацией о занятости временных интервалов маяковых сигналов в упомянутом переданном и принятом маяковых сигналах (600), и
b. сохранения и удаления информации относительно занятости временных интервалов маяковых сигналов, положения (740.1) (755.1) динамического периода маяковых сигналов и длины (702) (753), которая содержится в маяковых сигналах (600), переданных упомянутым передатчиком (506) и принятых упомянутым приемником (502).
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| МОДУЛЬ ДЛЯ РЕТРАНСЛЯЦИИ СООБЩЕНИЙ В КОММУТАЦИОННОЙ СТРУКТУРЕ | 2002 |
|
RU2222044C2 |
| СПОСОБ УПРАВЛЕНИЯ КОММУТАЦИОННЫМ УЗЛОМ, УПРАВЛЯЮЩИЕ УСТРОЙСТВА И ПРОГРАММНЫЕ МОДУЛИ ДЛЯ ЭТОГО, А ТАКЖЕ КОММУТАЦИОННЫЙ УЗЕЛ И СИСТЕМА КОММУТАЦИИ, ОБОРУДОВАННАЯ КОММУТАЦИОННЫМ УЗЛОМ | 1995 |
|
RU2160464C2 |
| Инструмент для чистовой обработки тел вращения методом пластической деформации | 1984 |
|
SU1206070A2 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |

