Область техники
Изобретение относится к области машиностроения, а именно к шпинделям со встроенным электродвигателем с магнитными подшипниками на валу, и может быть использовано для оснащения различных обрабатывающих станков, в быстроходных центрифугах и других специальных центробежных установках (например, в различных измельчителях материалов).
Предшествующий уровень техники
В настоящее время ряд зарубежных фирм изготавливает шпиндели с магнитными подшипниками вала, например компания «SKF Group» (Каталог «General Catalogue. School edition» (Catalogue 5000 E - June 2003), стр.1095, 1103). Они содержат блоки активных (управляемых сигналами датчиков положения вала) магнитных подшипников, встроенный электродвигатель и два страховочных (используемых в случае отказа магнитного подвеса) шарикоподшипника, установленные с зазором относительно корпуса шпинделя. Блок магнитных подшипников содержит два радиальных и один осевой или два радиально-осевых (конических) подшипника и требует сложной, громоздкой и дорогой системы электронного управления, содержащей пять каналов регулирования (два - для каждого радиального подшипника и один - для осевого подшипника).
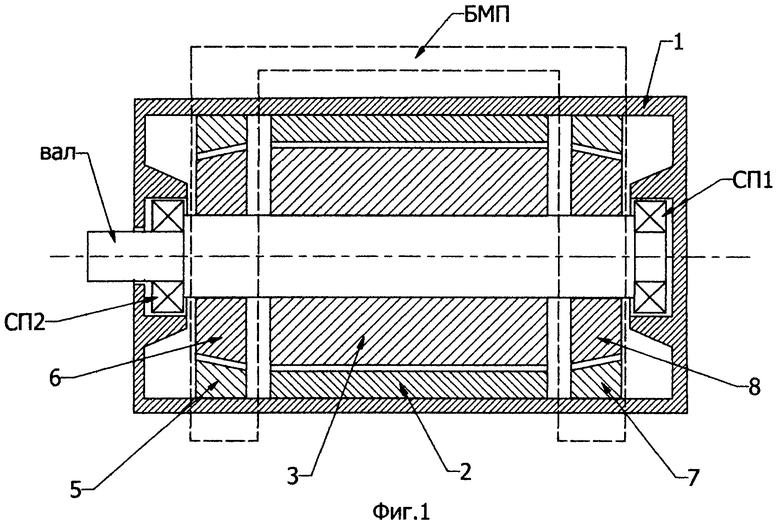
За прототип принят подобный шпиндель, описанный автором (Журавлев Ю.Н. «Активные магнитные подшипники. Теория, расчет, применение», «Политехника», Санкт-Петербург, 2003, стр.22, рис.2.4, стр.24 рис.2.6-2.7, стр.187 (прототип) [1]) и представленный на фиг.1, который содержит корпус 1, электродвигатель (статор 2, ротор 3), блок магнитных подшипников (БМП), состоящий из двух конических подшипников (первый - статор 5, ротор 6, второй - статор 7, ротор 8), и два страховочных шарикоподшипника СП1 и СП2, установленных на валу с зазорами между наружными кольцами и корпусом. При отказе магнитного подшипника вращающийся вал входит через эти подшипники в контакт с корпусом, после чего производится остановка, например, на свободном выбеге.
Недостатками шпинделя-прототипа являются сложность конструкции и электронных блоков управления, возможность разрушения из-за явления обката (стр.187 [1]) при контакте корпуса со страховочными подшипниками, допустимая скорость вращения которых естественно ниже скорости вращения вала в бесконтактном магнитном подвесе (поэтому страховочные подшипники выдерживают ограниченное число аварийных ситуаций). Основной недостаток прототипа с точки зрения потребителя - дороговизна магнитных подшипников со сложными блоками управления, что на практике приводит к тому, что они не выдерживают конкуренции с обычными подшипниками со смазкой, например, масляным туманом. Применение магнитных опор экономически оправдано в мощных энергетических установках благодаря устранению чрезвычайно большого расхода масла для традиционных опор валов.
Сущность изобретения
Задача изобретения заключается в существенном упрощении как конструкции шпинделя, так и его электронных компонентов, сокращении их числа и повышении надежности всего устройства. Следствием этого является значительное снижение стоимости шпинделя, и, следовательно, он становится доступным для большого круга потребителей скоростных приводов.
Эта задача решена благодаря тому, что вал шпинделя выполнен полым, страховочные подшипники установлены между полой частью вала и осью, закрепленной на торце корпуса, а БМП - в корпусе в зоне выходной части полого вала, заглушенного со стороны установки рабочего инструмента. На оси установлено демпфирующее устройство в виде диска и кольца из пористого эластомера, помещенного между диском и торцом корпуса. Для предельного упрощения БМП выполнен в виде одного статора с обмотками и ротора. При этом в рабочих зазорах на поверхностях статора и ротора сделан ряд соответствующих друг другу кольцеобразных углублений. Система электронного управления выполнена в виде соединенных в две (по ортогональным осям) мостовые схемы диаметрально противоположно расположенных обмоток статора. При этом к первым диагоналям схем подключен источник питающего переменного напряжения, а ко вторым - блоки управления. Для увеличения осевой жесткости применен третий блок управления, включенный между мостовыми схемами и источником питающего напряжения.
Перечень чертежей
Изобретение поясняется чертежами.
На фиг.1 показано устройство шпинделя-прототипа.
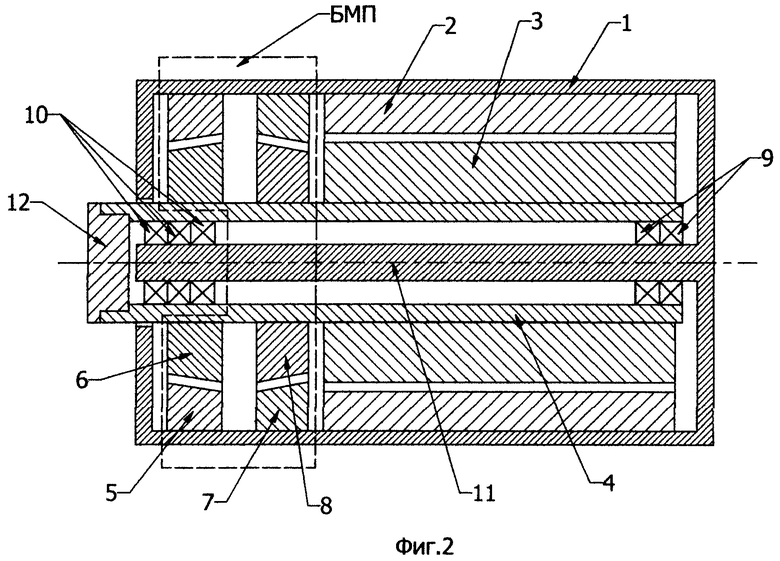
На фиг.2 представлена конструкция предложенного шпинделя.
На фиг.3 более детально показана конструкция предложенного шпинделя с устройством демпфирования оси и БМП в виде одного специального статора и ротора.
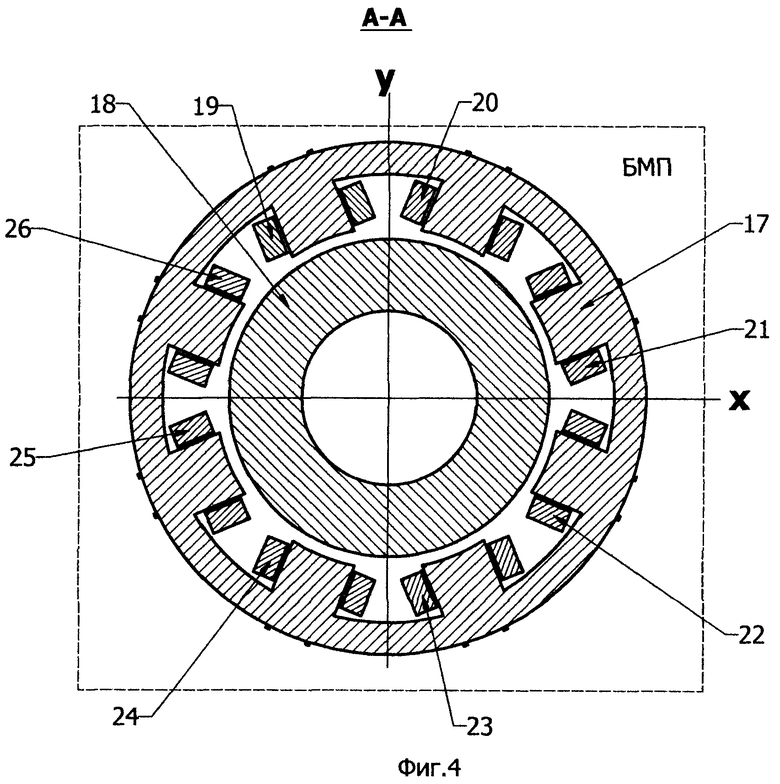
На фиг.4 представлен в разрезе специальный статор магнитного подшипника.
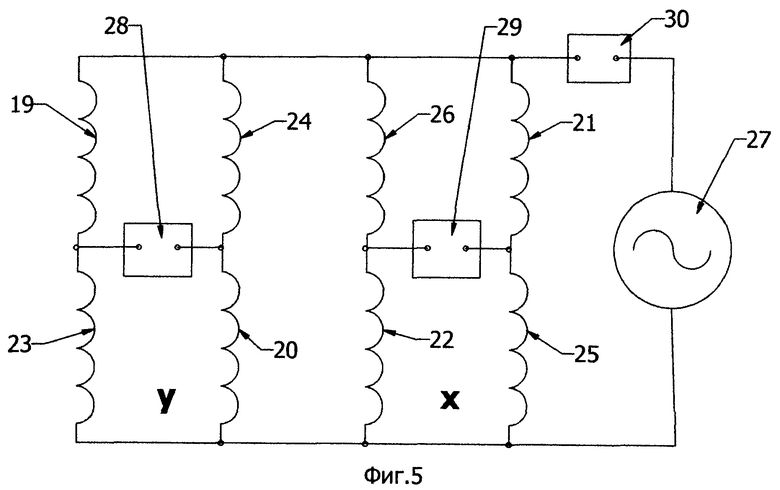
На фиг.5 приведена электрическая схема подключения обмоток статора магнитного подшипника к источнику питающего напряжения и блокам управления.
Предложенный шпиндель (фиг.2) содержит корпус 1, электродвигатель, состоящий из статора 2 и ротора 3, установленного на полом валу 4, и две группы страховочных подшипников (первая 9 - в торце шпинделя, вторая 10 - в зоне выхода вала). БМП содержит два конических (радиально-осевых) подшипника: первый - статор 5 и ротор 6, второй - статор 7 и ротор 8. Страховочные подшипники установлены без зазора в полости вала 4 на оси 11. На выходе вала установлена заглушка 12, к которой крепится рабочий инструмент (для упрощения чертежа обмотки статоров двигателя и магнитных подшипников не показаны).
Для увеличения жесткости оси 11 (фиг.3), закрепленной в задней крышке 13 шпинделя (передняя крышка - 14), использована конфигурация, при которой средняя часть оси (без подшипников) выполнена с увеличенным диаметром, величина которого определяется диаметром полости вала. В торце шпинделя относительно крышки 13 установлено демпфирующее устройство, состоящее из диска 15, жестко закрепленного на оси 11, и кольца 15, например, из пористого эластомера. БМП выполнен в виде одного зубчатого статора 17 (обмотки статора на фиг.3 не показаны) и ротора 18, на которых в рабочем зазоре выполнен ряд соответствующих друг другу кольцеобразных углублений (на чертеже - четыре). Зубчатый статор БМП (фиг.4) содержит восемь обмоток 19-26. Диаметрально противоположно расположенные обмотки 19-23 и 20-24 включены (фиг.5) в первую мостовую схему для реализации тяги магнитного поля по оси y. Аналогично обмотки 21-25 и 22-26 включены во вторую мостовую схему для реализации тяги по ортогональной оси x. К первым (входным) диагоналям этих схем подключен источник питающего переменного напряжения 27, ко вторым (выходным) диагоналям подключены электронные блоки управления 28 и 29. Такое исполнение БМП в виде одного статора 17 и ротора 18 с кольцеобразными углублениями обеспечивает осевую жесткость вала без использования дополнительных средств. Для увеличения осевой жесткости вала и регулирования его продольного смещения применен дополнительно третий блок управления, включенный последовательно между мостовыми схемами и источником питающего напряжения.
Предложенный шпиндель (фиг.2) работает следующим образом. Блок шарикоподшипников 9, установленных без зазора между полостью вала и осью 11, обеспечивает радиальную жесткость в зоне торца вала. Число и размеры этих подшипников устанавливаются исходя из радиальной нагрузки и допустимой скорости вращения подшипников. Диаметр их может быть в несколько раз меньше диаметра страховочных подшипников прототипа и, следовательно, удовлетворяет высокой рабочей скорости вращения вала шпинделя, передающего большую мощность от двигателя к инструменту благодаря практически неограниченному наружному диаметру. Блок подшипников 10 обеспечивает (без включенного БМП) в зоне выхода вала (установки рабочего инструмента) радиальную жесткость, соответствующую угловой жесткости оси 11 и достаточную для аварийного режима работы без контакта компонентов вращающегося вала с корпусом. Демпфер в основании оси 11 (диск 15 и кольцо 16, фиг.3) обеспечивает разгон и остановку шпинделя без включения БМП при прохождении резонансной частоты вращения вала, определяемой его массой и угловой жесткостью оси. От чрезмерной аварийной осевой нагрузки предохраняет контакт заглушки 12 (фиг.3) со сферической поверхностью свободного торца оси 11. В рабочем режиме включен БМП, который создает высокие статические радиальную и осевую жесткости вала в зоне рабочего инструмента, обеспечивает демпфирование колебаний вала, позволяет регулировать его положение и парировать нагрузки, вызванные дебалансом инструмента.
Предлагаемый принцип построения шпинделя позволяет создать наиболее простую и надежную конструкцию с магнитными подшипниками, представленную на фиг.3. БМП, создающий в зоне выхода вала радиальную и одновременно осевую жесткости, выполнен в виде специального статора 17 и ротора 18 с рядом радиальных кольцевых углублений, приводящих к образованию (в разрезе) продольных зубцовых зон. Притяжение в магнитном поле статора зубцов ротора к зубцам статора обусловливает осевую жесткость вала, пропорциональную количеству этих зубцов, без использования электронного блока управления.
Обмотки 19-26 (фиг.4) статора 17 с восемью радиальными зубцами соединены по осям x и y в идентичные мостовые схемы (фиг.5). При смещении ротора 18, например, по оси y, по направлению к обмоткам 23 и 24 индуктивности этих обмоток увеличиваются, а индуктивности противоположных обмоток 19 и 20 уменьшаются. В результате в выходной диагонали рассматриваемой мостовой схемы, подключенной к источнику переменного напряжения 27, появится сигнал, пропорциональный смещению тела. Этот сигнал преобразуется в силовое переменное напряжение, прикладываемое к точкам выходной диагонали для создания силы, противодействующей смещению ротора, например, с помощью блока управления 28 (Патент РФ № 2209393, кл. G01С 19/00, 2003) где компенсация влияния силового напряжения на сигнал рассогласования реализована благодаря введению в усилителе отрицательной обратной связи с учетом фазового сдвига по отношению к сигналу рассогласования. Необходимо отметить, что в предложенном шпинделе источником питающего напряжения 27 магнитного подшипника служит фазное напряжение питания асинхронного двигателя.
Еще более простое выполнение блоков управления соответствует применению резонансных схем со специальными пассивными демпферами (Патент РФ № 2193122, кл. F16С 32/04, кл. G01С 19/24, 2002), содержащими интеграторы, обусловливающие получение высокой статической жесткости резонансного подвеса.
Применение блока управления 30 позволяет существенно увеличить естественную осевую жесткость рассматриваемого БМП при ограниченном числе кольцеобразных углублений на статоре и роторе.
Предложенный шпиндель с магнитными подшипниками по сравнению с прототипом существенно проще и надежнее. Следствием этого является его сравнительно низкая стоимость, что может привести к доступности использования шпинделя в мощных высокоскоростных приводах.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПОДШИПНИКОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2017 |
|
RU2652792C1 |
| МАГНИТНЫЙ ПОДВЕС РОТОРА УСТРОЙСТВА | 1992 |
|
RU2037685C1 |
| ЭЛЕКТРОШПИНДЕЛЬ | 2013 |
|
RU2528420C1 |
| ПОДШИПНИК СИСТЕМЫ ЭНЕРГОНЕЗАВИСИМОГО АКТИВНОГО МАГНИТНОГО ПОДВЕСА РОТОРА | 2003 |
|
RU2246644C1 |
| ЭЛЕКТРОМАШИНА | 2013 |
|
RU2541356C1 |
| ВЫСОКОСКОРОСТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ВЕРТИКАЛЬНЫМ ВАЛОМ | 2013 |
|
RU2540696C1 |
| БЕСПОДШИПНИКОВАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2014 |
|
RU2562448C1 |
| ГИБРИДНЫЙ МАГНИТНЫЙ ПОДШИПНИК С ОСЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2540215C1 |
| Вентильный электродвигатель | 1973 |
|
SU650169A1 |
| ПРИВОД ШПИНДЕЛЬНОГО ДИСКА | 1993 |
|
RU2092957C1 |
Изобретение относится к машиностроению, а именно к шпинделям со встроенным электродвигателем и магнитными подшипниками вала, и может быть использовано для оснащения обрабатывающих станков, в центрифугах и различных центробежных установках. Шпиндель содержит корпус, электродвигатель, полый вал, блок магнитных подшипников (БМП) и страховочные подшипники, установленные в полости вала на оси, закрепленной в торце шпинделя и снабженной демпфером в виде диска и кольца из эластомера. БМП размещен в зоне выходной части полого вала, заглушенного со стороны установки рабочего инструмента. Обеспечивается упрощение устройства мощных высокооборотных шпинделей и повышение их надежности. 4 з.п. ф-лы, 5 ил.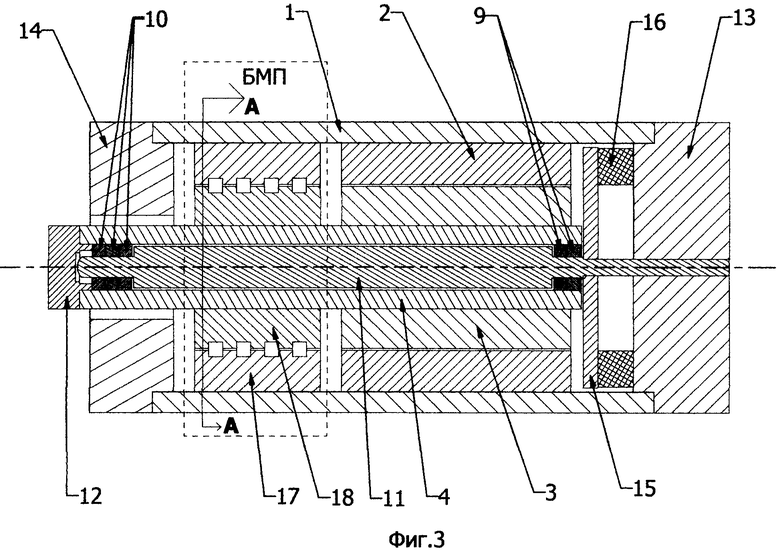
1. Шпиндель, содержащий корпус и электродвигатель с блоком магнитных подшипников и страховочными подшипниками вала, отличающийся тем, что вал выполнен полым с заглушением со стороны установки рабочего инструмента, страховочные подшипники установлены в полости вала на оси, закрепленной на торце корпуса, а блок магнитных подшипников размещен в корпусе в зоне выходной части полого вала.
2. Шпиндель по п.1, отличающийся тем, что он снабжен демпфирующим устройством в виде диска, закрепленного на оси, и кольца, выполненного, например, из эластомера, помещенного между диском и торцом корпуса.
3. Шпиндель по п.1 или 2, отличающийся тем, что блок магнитных подшипников выполнен в виде одного зубчатого статора и ротора, поверхности которых со стороны рабочего зазора выполнены с соответствующими друг другу кольцеобразными углублениями.
4. Шпиндель по п.3, отличающийся тем, что диаметрально противоположно расположенные обмотки статора по каждой из двух ортогональных осей соединены в две мостовые схемы, к первым диагоналям которых подключен источник питающего переменного напряжения, а ко вторым - блоки управления.
5. Шпиндель по п.4, отличающийся тем, что мостовые схемы подключены к источнику питающего напряжения через третий блок управления.
| ШПИНДЕЛЬНЫЙ УЗЕЛ | 1994 |
|
RU2080214C1 |
| RU 2003121103 A, 10.01.2005 | |||
| US 6288456 B1, 11.09.2001. | |||

