Область техники
Изобретение относится к области электромашиностроения и может быть использовано в различных установках с высокоскоростным электрическим приводом рабочего органа, в частности, в условиях вакуума.
Предшествующий уровень техники
Широко известны бесподшипниковые (бесконтактные) электрические машины (БЭМ) с магнитным подвесом вращающегося ротора. Традиционная БЭМ состоит из обычного асинхронного двигателя, ротор которого установлен в одном осевом и двух радиальных активных магнитных подшипниках или только в двух конических магнитных подшипниках - [1] [Ю.Н. Журавлев «Активные магнитные подшипники», «Политехника», Санкт-Петербург, 2003, с. 22, рис. 2, 4. Схема системы управления подвесом ротора в конических подшипниках приведена на рис. 7, 19, с. 138-140. Весьма эффективный способ сделать электрическую машину конструктивно наиболее простой и компактной - это совместить в магнитных радиальных или конических подшипниках функции подвеса и вращения ротора. За прототип принята БЭМ, показанная на рис. 7, 246 с. 149-150 [1], содержащая ротор и два статора магнитного подвеса и вращения ротора. Существенным недостатком (проблемой) БЭМ - прототипа является сложность необходимого специального устройства для разделения радиальных сил магнитного подвеса и момента от вращающегося магнитного поля. Решение этой проблемы возможно при установке специальных датчиков вектора (положения и направления) магнитных потоков статоров, что очень усложняет как конструкцию, так и систему управления БЭМ.
Сущность изобретения
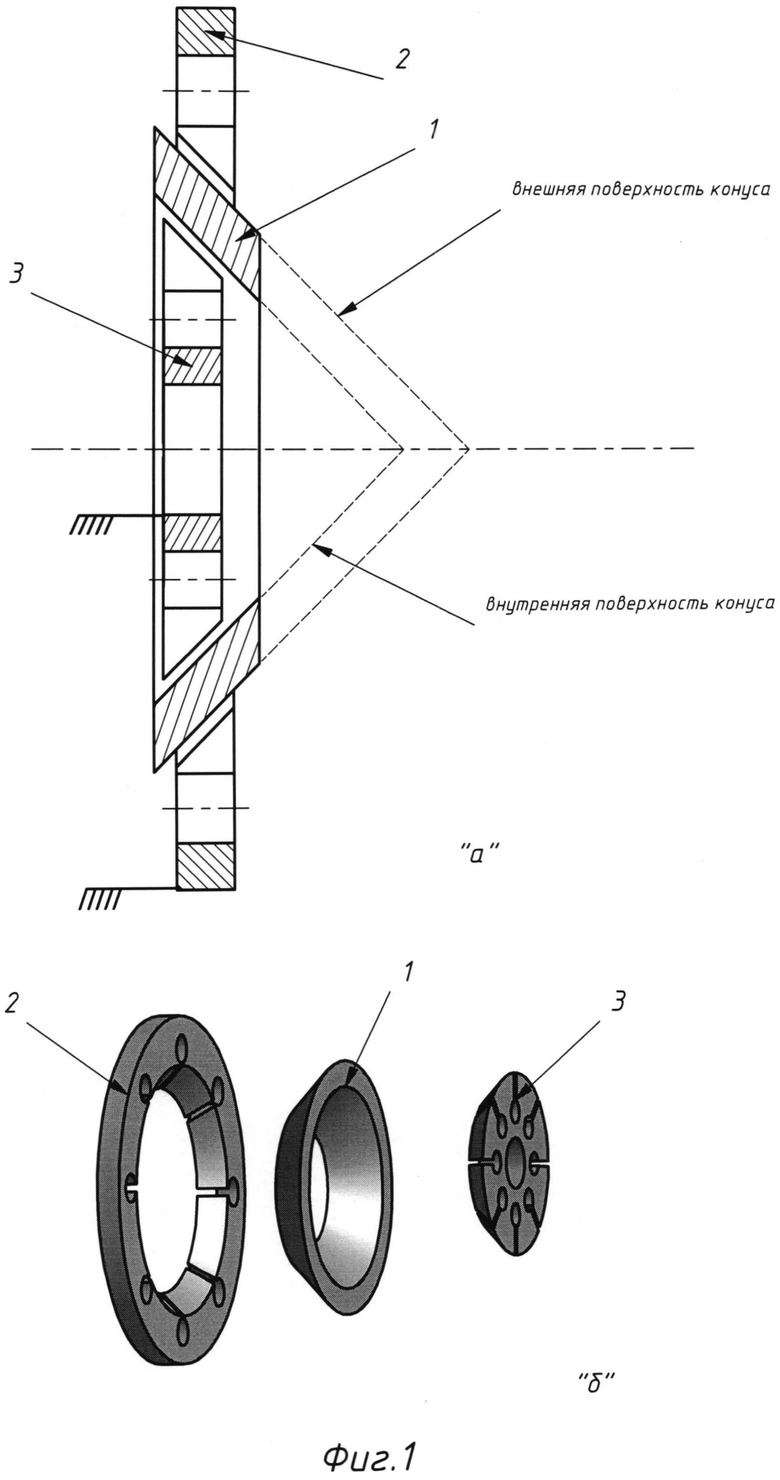
Задача изобретения заключается в упрощении конструкции и системы управления БЭМ без использования сложных устройств для исключения взаимного влияния центрирующего (обеспечивающего магнитный подвес ротора) и вращающего магнитного поля статоров (создающего вращающий момент ротора). Поставленная задача решена благодаря тому, что ротор БЭМ выполнен в виде части полого конуса, а конические рабочие поверхности двух статоров подвеса и вращения ротора расположены соответственно напротив внешней и внутренней поверхностей части полого конуса ротора.
Перечень фигур и чертежей
На фиг. 1 показана конструкция предложенной БЭМ в радиальном исполнении (при использовании традиционной технологии изготовления шихтованных ротора и статоров из плоских ферромагнитных пластин).
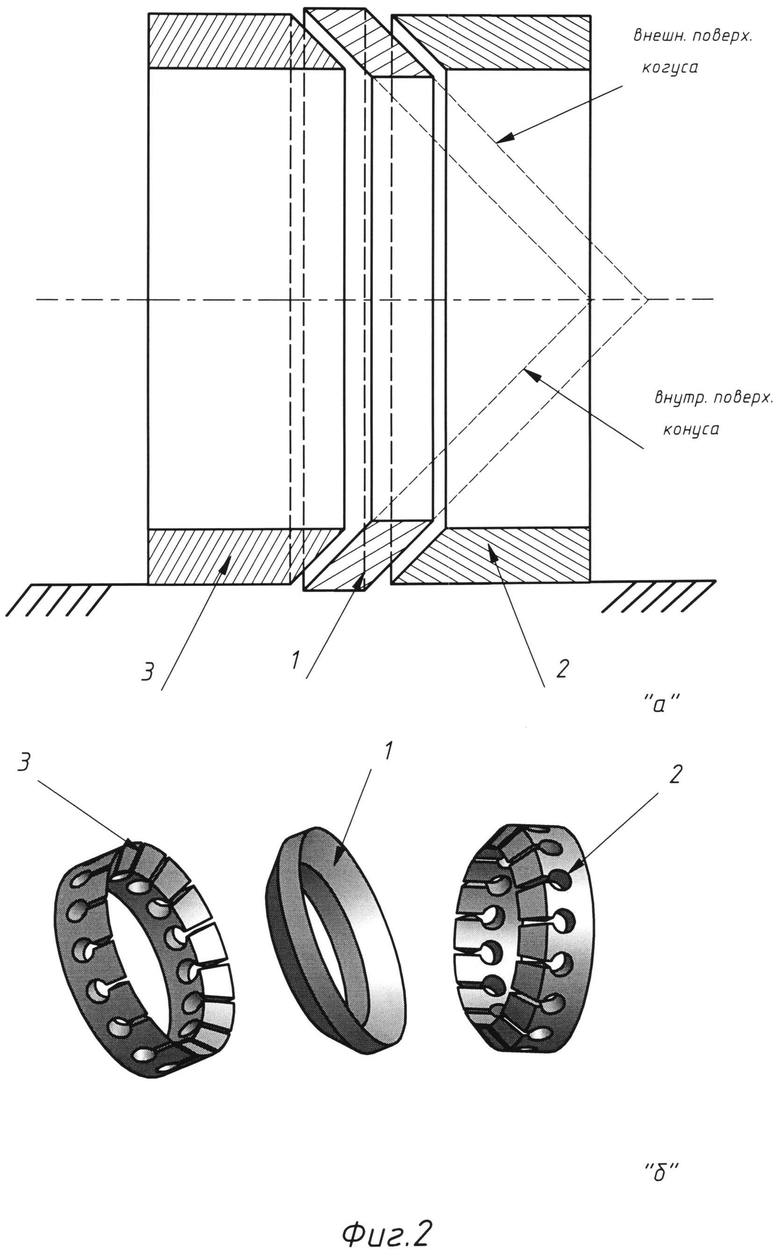
На фиг. 2 представлена конструкция предложенной БЭМ в осевом исполнении (при использовании тороидальных сердечников, навитых из ферромагнитной ленты).
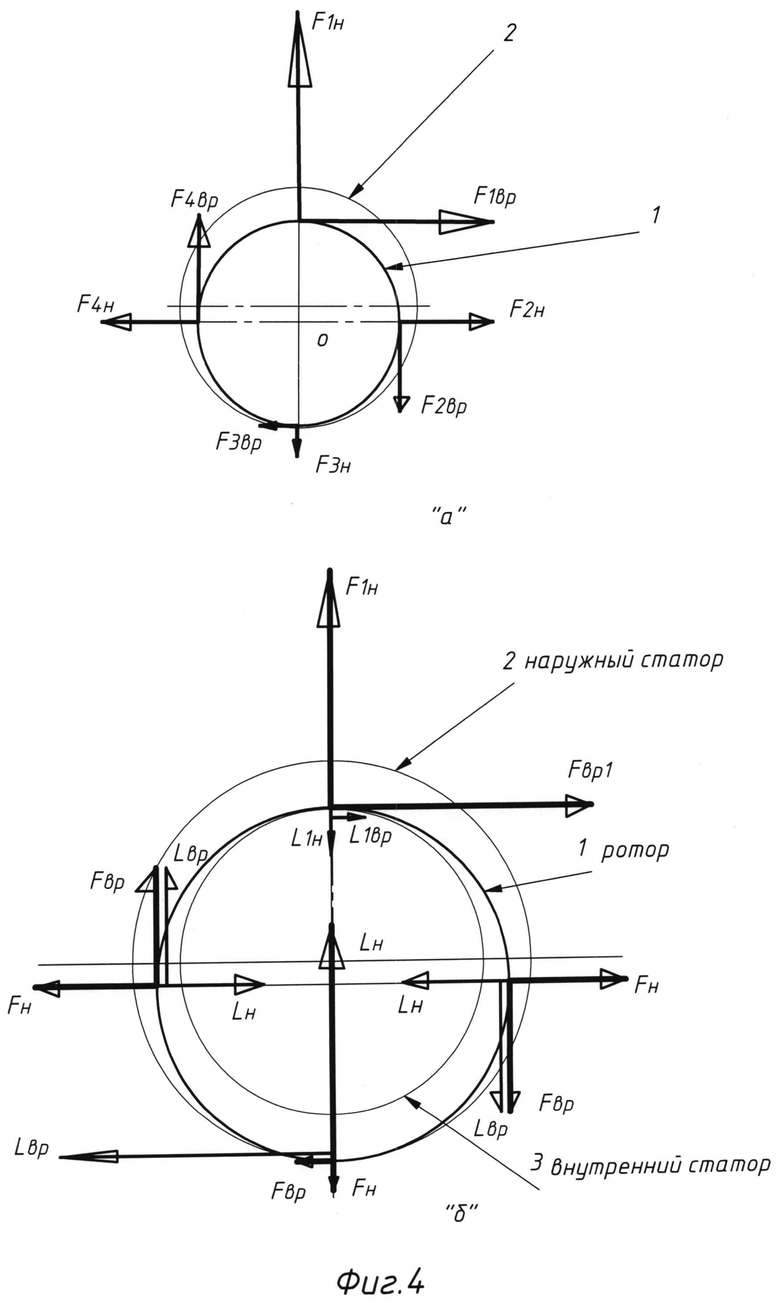
На фиг. 3 представлена одна из рекомендуемых конструкций БЭМ радиального исполнения с полым рабочим валом и страховочным подшипником.
Фиг. 4 иллюстрирует эффект исключения влияния приложенных к ротору поддерживающих и вращающих сил в предложенной БЭМ.
На фиг. 1-4 приняты следующие обозначения:
1 - ротор,
2 - внешний статор подвеса и вращения ротора,
3 - внутренний статор подвеса и вращения ротора,
4 - лобовые части обмоток подвеса и вращения внешнего статора,
5 - лобовые части обмоток подвеса и вращения внутреннего статора,
6 - основа конструкции ротора,
7 - внешняя шихтованная часть ротора,
8 - внутренняя шихтованная часть ротора
9 - полый рабочий вал,
10 - корпус БЭМ,
11 - первая крышка БЭМ,
12 - вторая крышка БЭМ,
13 - страховочный стержень.
Предложенная БЭМ содержит ротор 1 (фиг. 1-2) в виде части полого ферромагнитного конуса, внешний статор 2 подвеса и вращения ротора и внутренний статор 3 подвеса и вращения ротора. Радиальное исполнение БЭМ представлено на фиг. 1 (а. б) и основано на использовании традиционной технологии изготовления шихтованных ротора и статоров из плоских ферромагнитных пластин. (Для упрощения чертежа четырехполюсные обмотки подвеса и вращения на зубцах статоров не показаны). На фиг. 2 (а, б) представлена конструкция предложенной БЭМ в осевом исполнении при использовании тороидальных сердечников, навитых из ферромагнитной ленты. Восьмиполюсные обмотки на 16 зубцах (фиг. 2б) также для упрощения чертежа не показаны. БЭМ радиального исполнения для практического применения (с рабочим валом) представлена на фиг. 3. Она содержит внешний шихтованный статор 2 подвеса и вращения ротора с обмотками с лобовыми частями 4, внутренний шихтованный статор 3 подвеса и вращения ротора с обмотками с лобовыми частями 5. Ротор этой БЭМ состоит из основы 6, внешней шихтованной части ротора 7 и внутренней шихтованной части 8. Полый рабочий вал 9 соединен с основой 6 ротора. Корпус 10 имеет первую 11 и вторую 12 крышки. Крышка 11 снабжена страховочным стержнем 13, помещенным в полость рабочего вала 9.
Двухфазные (или трехфазные) обмотки (подвеса и вращения) статоров БЭМ выполняются, как правило, с числом отдельных секций 4 для регулирования магнитного потока каждой секции в зависимости от смещения ротора с помощью известных систем управления (например, при использовании наиболее простой бездатчиковой системы по заявке №2009141906 «Способ центрирования ферромагнитного тела»). При подключении статоров предложенной БЭМ к известной системе управления с двух- или трехфазным источником опорного напряжения ее ротор приходит во вращение в бесконтактном магнитном подвесе.
Эффект исключения влияния приложенных к ротору поддерживающих и вращающих сил в предложенной БЭМ поясняется фиг. 4. На фиг. 1а показаны силы, действующие на ротор 1 со стороны традиционного одиночного статора 2 подвеса и вращения ротора при вертикальном смещении ротора из-за внешней нагрузки. В этом случае нагрузка N компенсируется разницей вертикальных нормальных сил N=F1н-F3н, а уравновешенный момент вращения от касательных к ротору сил Fвр относительно центра О становится равным Ма=(Fвp2+Fвp4+2Fвp3)r, где r - средний радиус ротора. При этом в месте увеличения зазора между ротором и статором возникает значительная опрокидывающая ротор сила
Fопр=Fвp1-Fвp3, которая нарушает равновесие и приводит ротор к обкату по поверхности статора, т.е. делает данное устройство - прототип неработоспособным. В предложенном устройстве БЭМ (фиг. 4б) нагрузка по вертикальной оси компенсируется главным образом суммой нормальных сил внешнего 2 и внутреннего 3 статоров, т.е. N=F1н+L3н, а вращающий момент относительно центра ротора равен
Мб=(Fвp1+Lвp1+Fвp2+Lвp2+Fвp3+Lвp3+Fвp4+Lвp4)r и не содержит опрокидывающей ротор силы.
Конструкция БЭМ с полым ротором и внешним и внутренним статорами обусловливает решение проблемы разрушающего обката ротора при аварийной посадке его на ограничительные страховочные упоры (подшипники). В этом случае легко выполнить страховочные упоры, взаимодействующие одновременно с внешней и внутренней поверхностями ротора (Е.А. Артюхов «Ограничитель скорости обката ротора», журнал «Гироскопия и навигация», №3 (30), 2000). В БЭМ на фиг. 3 посадка вращающегося ротора на стержень 13 вызывает прямой (совпадающий с направлением вращения ротора) обкат, который благодаря упругому смещению стержня прерывается обратным (противоположным вращению ротора) обкатом при контакте вала 9 с крышкой 12.
Предложенная БЭМ может быть реализована в различных устройствах - от маломощных гироскопических приборов, работающих в вакууме, до мощных агрегатов (шлифовальных шпинделей, насосов и турбин).
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПОДШИПНИКОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2017 |
|
RU2652792C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ГИРОСКОП | 2015 |
|
RU2589939C1 |
| ШПИНДЕЛЬ | 2008 |
|
RU2370344C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 2015 |
|
RU2579156C1 |
| ЦЕНТРОБЕЖНАЯ УСТАНОВКА С МАГНИТНЫМ ПОДШИПНИКОМ | 2007 |
|
RU2358807C1 |
| УСТРОЙСТВО ПОДВЕСА ФЕРРОМАГНИТНОГО СФЕРИЧЕСКОГО РОТОРА | 1996 |
|
RU2156441C2 |
| СПОСОБ ИЗМЕЛЬЧЕНИЯ МАТЕРИАЛА | 2009 |
|
RU2393018C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2015 |
|
RU2577553C1 |
| УНИВЕРСАЛЬНЫЙ НЕКОНТАКТНЫЙ ГИРОСКОП | 2013 |
|
RU2521765C1 |
| Радиально-упорный мотор-подшипник | 1990 |
|
SU1798859A1 |
Изобретение относится к области электромашиностроения и может быть использовано в различных установках с высокоскоростным электрическим приводом рабочего органа, в частности, в условиях вакуума. Технический результат заключается в упрощении конструкции бесподшипниковой электрической машины и её системы управления. Бесподшипниковая электрическая машина содержит ферромагнитный ротор и два статора магнитного подвеса и вращения ротора. Ротор выполнен в виде части полого конуса. Конические рабочие поверхности двух статоров расположены соответственно напротив внешней и внутренней поверхностей части полого конуса ротора. 4 ил.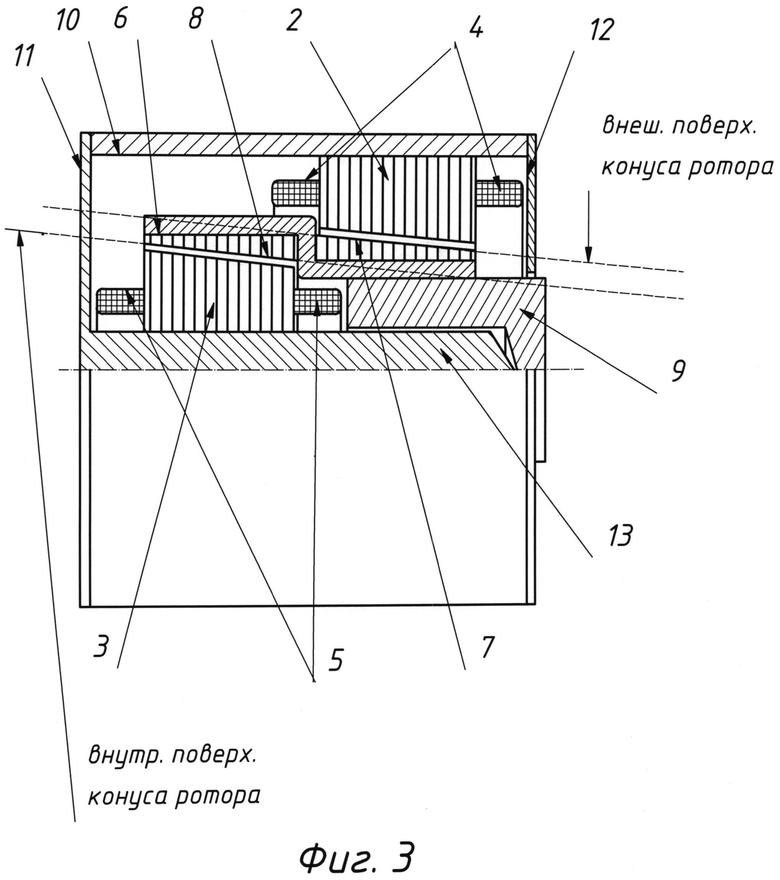
Бесподшипниковая электрическая машина, содержащая ферромагнитный ротор и два статора магнитного подвеса и вращения ротора, отличающаяся тем, что ротор выполнен в виде части полого конуса, а конические рабочие поверхности двух статоров расположены соответственно напротив внешней и внутренней поверхностей части полого конуса ротора.
| Электродвигатель с электромагнитным подвесом ротора | 1977 |
|
SU664261A1 |
| Электродвигатель переменного тока с электромагнитной подвеской ротора | 1973 |
|
SU454639A1 |
| JP 2010063196 A, 18.03.2010 | |||
| US 3396288 A1, 06.08.1968 | |||
| US 20050067917 A1, 31.03.2005 | |||
| WO 2009093183 A2, 30.07.2009 | |||

