Изобретение относится к силоизмерительной технике, а именно к средствам измерения тяги электрореактивных двигателей (ЭРД), в частности плазменных ускорителей с замкнутым дрейфом электронов, и может также использоваться для измерения тяги самых различных устройств, являющихся генераторами плазменных струй.
При проведении исследований различных типов ЭРД на современном техническом уровне все острее стоит задача определения не только величины, но и направления вектора тяги ЭРД, то есть определения не только основной, но и относительно малых величин (1…100 мГ силы) боковых составляющих вектора тяги ЭРД. Для этой цели могут быть использованы только тягоизмерительные устройства (ТИУ), обладающие высокой чувствительностью измерения усилий.
Одним из таких ТИУ, отличающихся высокой чувствительностью измерения усилий, является ТИУ, выполненное по схеме крутильных весов (1). Это устройство содержит горизонтально расположенное и подвешенное на упругом на кручение подвесе подвижное коромысло, на одном конце которого установлен испытуемый ЭРД, а на другом конце - уравновешивающий противовес. Устройство содержит также отсчетное устройство оптического типа, снабженное направленным источником света и индикатором положения луча.
Однако данное ТИУ не содержит в себе устройства или приспособления, позволяющего с высокой точностью выставлять ЭРД относительно подвижного коромысла. Отсутствие такого устройства или приспособления при использовании данного ТИУ при измерении боковых составляющих вектора тяги ЭРД может привести к неточному определению величин этих составляющих.
При неточной установке углового положения оси ЭРД относительно упругого на кручение подвеса ТИУ после включения ЭРД на подвижное коромысло ТИУ будет сообщено некоторое дополнительное паразитное усилие, вызывающее возникновение дополнительного паразитного крутящего момента, действующего на подвижное коромысло. Причем это усилие будет определяться не величиной и направлением вектора тяги самого ЭРД, а неточностью такой установки. Это усилие будет регистрироваться ТИУ, что приводит к ошибке в измерении боковых составляющих вектора тяги ЭРД.
Наиболее близким к предлагаемому техническому решению по совокупности признаков и принятым за прототип является ТИУ, предназначенное для измерения боковых составляющих вектора тяги ЭРД (2), выполненное по схеме крутильных весов. Это устройство содержит горизонтально расположенное и подвешенное на упругом на кручение подвесе подвижное коромысло. На одном конце этого коромысла через подвижный монтажный узел установлен испытуемый ЭРД, а на другом конце размещен уравновешивающий противовес и отсчетное устройство, регистрирующее крутящий момент. Испытуемый ЭРД размещен на коромысле через подвижный монтажный узел, который позволяет изменять положение ЭРД относительно коромысла. В качестве отсчетного устройства в такого рода ТИУ обычно используется датчик оптического типа.
Однако в описании данного устройства отсутствует информация о том, каким образом оно позволяет с высокой точностью выставлять ЭРД относительно подвижного коромысла. То есть вопросу точной угловой установки ЭРД на ТИУ здесь не уделено должного внимания.
Целью изобретения является повышение точности измерения боковых составляющих вектора тяги ЭРД с помощью крутильных весов путем точной установки ЭРД относительно упругого на кручение подвеса подвижного коромысла.
Указанная цель достигается тем, что в ТИУ типа крутильных весов, содержащем горизонтально расположенное и подвешенное на упругом на кручение подвесе подвижное коромысло, на одном конце которого через подвижный монтажный узел установлен испытуемый ЭРД, а на другом конце коромысла размещен уравновешивающий противовес, и отсчетное устройство оптического типа, снабженное источником света и индикатором положения луча, согласно изобретению упругий подвес стыкуется с коромыслом через кронштейн, в котором выполнена узкая вертикальная щель, совпадающая с осью упругого подвеса, монтажный узел снабжен зеркалом, плоскость которого параллельна плоскости монтажного узла в месте стыка его с коромыслом, зеркало снабжено вертикальным указателем, находящимся в одной плоскости с осью монтажного узла в месте стыка его с коромыслом, причем источник света расположен таким образом, что исходящий из него луч попадает через щель на зеркало, а отраженный от зеркала луч попадает на индикатор положения луча.
При этом ширина щели в кронштейне может быть не менее чем на три порядка меньше длины части коромысла от монтажного узла до кронштейна.
Кроме того, в кронштейне рядом со щелью для прохода светового луча может быть выполнено окно, ширина которого много больше ширины щели.
Дополнительно к этому устройство отсчета может быть расположено за коромыслом со стороны противовеса.
Сущность изобретения поясняется схемой, представленной на чертеже. ТИУ содержит горизонтально расположенное и подвешенное на упругом на кручение подвесе 1 подвижное коромысло 2, на одном конце которого через подвижный монтажный узел 3 установлен испытуемый ЭРД 4, а на другом конце коромысла размещен уравновешивающий противовес 5. Упругий подвес 1 стыкуется с коромыслом 2 через кронштейн 6.
Посылаемый из направленного источника света 7 луч 8 проходит через узкую вертикальную щель 9, выполненную в кронштейне 6, и попадает на зеркало 10, установленное на подвижном монтажном узле 3. Далее луч, отражаясь от зеркала 10, возвращается назад и попадает на индикатор 11 положения луча.
Если исходящий из источника света 7 луч 8, проходящий через щель 9 в кронштейне 6, будет располагаться в единой вертикальной плоскости с отраженным от зеркала 10 лучом 12 в месте расположения на зеркале вертикального указателя 13, то, поскольку щель 9 в кронштейне 6 выполнена совпадающей с осью 14 упругого подвеса 1 (имеющей также вертикальное направление в ТИУ типа крутильных весов), то это будет свидетельствовать, что ось 15 монтажного узла 3 в месте стыка его с коромыслом 2 будет находится в одной вертикальной плоскости с осью 14 упругого на кручение подвеса 1. Такое положение будет регистрироваться индикатором 11 положения луча, на котором след от луча 12 будет находиться в единой вертикальной плоскости с лучом 8, исходящим из источника света 7.
Для случая, когда ЭРД 4, установленный на монтажный узел 3, располагается вдоль коромысла 2, то есть для случая, когда ось 16 ЭРД 4 будет совпадать с осью 15 монтажного узла 3 в месте стыка его с коромыслом 2 (такая постановка позволяет как раз измерять боковые составляющие вектора тяги ЭРД), выполнение вышеописанного условия прохождения падающего на зеркало 10 луча 8, а затем отраженного луча 12 по элементам конструкции ТИУ будет свидетельствовать о том, что ось 16 ЭРД 4 находится в единой вертикальной плоскости с осью 14 упругого на кручение подвеса 1. В этом случае при включении ЭРД 4 возникающая основная составляющая его тяги, направленная вдоль оси 16 ЭРД 4, не будет приводить к возникновению крутящего момента на подвижное коромысло 2, то есть не будет создавать дополнительный паразитный момент, связанный с неточностью установки ЭРД 4 на ТИУ. ТИУ будет измерять только боковые составляющие тяги ЭРД 4.
Для случая, когда ЭРД 4, установленный на монтажный узел 3, располагается под углом к коромыслу 2 (как в конструкции прототипа), выполнение вышеописанного условия прохождения падающего луча 8, а затем отраженного луча 12 по элементам конструкции ТИУ позволит более точно определить положение ЭРД 4 относительно оси 14 упругого на кручение подвеса 1, то есть в итоге более точно определить все составляющие вектора тяги ЭРД 4.
Если же исходящий из источника света 7 луч 8, проходящий через щель 9 в кронштейне 6, не будет располагаться в единой вертикальной плоскости с отраженным от зеркала 10 лучом 12 или если падающий на зеркало 10 луч 12 после своего прохождения через щель 9 в кронштейне 6 не будет попадать на вертикальный указатель 13 зеркала 10, то это будет означать, что ось 15 монтажного узла 3 в месте стыка его с коромыслом 2 не будет находится в одной вертикальной плоскости с осью 14 упругого на кручение подвеса 1. Тогда, например, при установке ЭРД 4 вдоль подвижного коромысла 2 после включения ЭРД 4 создаваемая им основная компонента вектора тяги будет приводить к возникновению паразитного крутящего момента на подвижное коромысло 2, то есть она будет создавать дополнительный паразитный момент, связанный с неточностью установки ЭРД 4 на ТИУ, приводящий к неточности измерения боковых составляющих тяги ЭРД 4.
Поскольку монтажный узел 3 выполнен подвижным, это позволяет до включения ЭРД 4 перемещать монтажный узел 3 относительно подвижного коромысла 2 до такого положения, при котором исходящий из источника света 7 луч 8, проходящий через щель 9 кронштейна 6, будет располагаться в единой вертикальной плоскости с отраженным от зеркала 10 лучом 12 в месте расположения на зеркале 10 вертикального указателя 13. Тогда ось 15 монтажного узла 3 в месте стыка его с коромыслом 2 будет находится в одной вертикальной плоскости с осью 14 упругого на кручение подвеса 1 и паразитный момент на подвижное коромысло 2 ТИУ, связанный с возникновением основной компоненты вектора тяги ЭРД, будет равен нулю. На чертеже показаны также коммуникационные линии 17 (газовые и электрические), подводимые к коромыслу 2 ТИУ с его неподвижной части 18.
Таким образом, такая конструкция ТИУ повышает точность измерения боковых составляющих вектора тяги ЭРД 4 путем точной установки ЭРД 4 относительно упругого на кручение подвеса 1 подвижного коромысла 2.
Для обеспечения высокой точности измерения боковых составляющих вектора тяги ЭРД ширину 5 щели 9 в кронштейне 6 целесообразно выполнить не менее чем на три порядка меньшей длины части коромысла 2 от монтажного узла до кронштейна L. Тогда максимальную величину погрешности угловой установки подвижного монтажного узла 3 относительно оси 14 упругого подвеса 1 (определяющая точность установки ЭРД 4 относительно оси 14 упругого подвеса 1, то есть точность измерения боковой составляющей вектора тяги ЭРД) можно оценить по выражению [1]
Δ=tg(δ/L)=tg(1/1000)~3,5 угловых минут,
что является допустимой величиной при измерении боковой составляющей вектора тяги ЭРД (обычно полная погрешность измерения боковой составляющей вектора тяги ЭРД составляет ~±15 угловых минут). С учетом же того обстоятельства, что после настройки ТИУ на индикаторе положения луча 11 след от луча 12 будет находиться в единой вертикальной плоскости с лучом 8, исходящим из источника света 7, погрешность угловой установки подвижного монтажного узла 3 относительно оси 14 упругого подвеса 1 будет еще меньше за счет большой суммарной длины лучей 8 и 12. При равенстве плеч подвижного коромысла 2 эта суммарная длина луча будет равна L∑~4L и тогда погрешность угловой установки подвижного монтажного узла 3 относительно оси 14 упругого подвеса 1, связанная с отклонением от перпендикулярности плоскости зеркала 10 (то есть плоскости монтажного узла в месте стыка его с коромыслом) к вертикальной плоскости лучей 8 и 12, будет составлять величину
Δ=tg(δ/L∑)=tg(1/4000)~1 угловую минуту,
что является вполне допустимой величиной при измерении боковой составляющей вектора тяги ЭРД.
Для удобства эксплуатации, чтобы отраженный от зеркала 10 луч 12 в широком диапазоне его угловых отклонений от вертикальной плоскости, проходящей через ось 14 упругого подвеса 1, попадал на индикатор 11 положения луча целесообразно в кронштейне 6 рядом с щелью 9 выполнить окно 19 для прохода отраженного от зеркала 10 луча 12, при этом ширина этого окна должна быть много больше ширины δ щели 9. Это полезно сделать для того, чтобы даже при заметном отклонении луча 12 от данной вертикальной плоскости можно было обнаружить след луча 12 на индикаторе 11 положения луча, что удобно при наладке ТИУ.
Также полезно расположить устройство отсчета 7 и 11 за коромыслом 2 со стороны противовеса. Во-первых, это позволяет увеличить чувствительность измерения ТИУ, что объясняется следующим образом.
После завершения операций по наладке ТИУ непосредственно при измерении боковой составляющей вектора тяги работающего ЭРД 4 луч 8 от источника света 7 целесообразно направить на зеркало 10 через окно 19 (а не через щель 9 в кронштейне 6, как при наладке). Тогда при использовании прямого способа измерения тяги по отклонению коромысла 2 от его первоначального положения поворот коромысла 2 под действием боковой составляющей вектора тяги ЭРД будет определяться некоторым перемещением зеркала 10 относительно оси 14 упругого подвеса 1 и соответственным перемещением отраженного луча 12. Перемещение луча 12 регистрируется индикатором 11 положения луча, по которому и определяется величина боковой составляющей вектора тяги ЭРД.
Чем больше длина луча 12, тем выше чувствительность измерения ТИУ (отношение расстояния, на которое перемещается луч 12 на индикаторе 11 положения луча под воздействием бокового усилия на подвижное коромысло 2, к величине этого бокового усилия) и, соответственно, выше точность измерения боковой составляющей вектора тяги ЭРД.
Во вторых, это позволяет уменьшить погрешность угловой установки подвижного монтажного узла 3 относительно оси 14 упругого подвеса 1 путем увеличения суммарной длины луча L∑ (см. выражение [1]). Расположение же устройства отсчета за коромыслом 2 приводит к дополнительным удобствам в эксплуатации подобного ТИУ.
Итак, предлагаемая конструкция ТИУ при ее использовании позволяет заметно повысить точность измерения боковых составляющих вектора тяги ЭРД.
Устройство по определению боковых составляющих вектора тяги ЭРД работает следующим образом. ЭРД 4 устанавливается через подвижный монтажный узел 3 на подвижное коромысло 2. На другой конец коромысла 2 устанавливается противовес 5 и производится балансировка коромысла 2. Далее включается направленный источник света 7, луч 8 которого направляется на щель 9 кронштейна 6. Проходя через щель 9, луч 8 попадает на зеркало 10 монтажного узла 3 и, отражаясь от него и проходя через окно 19 в кронштейне 6, попадает на индикатор 11 положения луча.
Затем производится регулировка положения монтажного узла 3 относительно подвижного коромысла 2. Эта регулировка положения обеспечивается тем, что монтажный узел 3 может перемещаться относительно подвижного коромысла 2. Регулировка заканчивается тогда, когда, во-первых, исходящий из источника света 7 луч 8, проходящий через щель 9 кронштейна 6, будет падать на вертикальный указатель 13 зеркала 10, а во-вторых, когда отраженный от зеркала 10 луч 12, проходящий через окно 19, будет располагаться в единой вертикальной плоскости с падающим лучом 8. Расположение отраженного 12 и падающего 8 лучей в единой вертикальной плоскости будет определяться положением следа от луча 12 на индикаторе 11 положения луча. Если след от луча 12 на индикаторе 11 положения луча будет находиться в единой вертикальной плоскости с источником света 7, то это и будет свидетельством выполнения последнего условия. Такое положение монтажного узла 3 (с установленным на нем ЭРД 4) относительно коромысла 2 фиксируется и более не изменятся в эксперименте по определению боковых составляющих вектора тяги ЭРД.
Затем делается вывод о достаточно точной установке ЭРД 4 на подвижное коромысло 2, после чего производится запуск ЭРД 4 и измерение одной из его боковых составляющих тяги. После этого ЭРД 4 поворачивается относительно коромысла на определенный угол, после чего производится второй запуск ЭРД 4, позволяющий определять другую компоненту его вектора тяги ЭРД.
При этом расположение устройства отсчета 7 и 11 за коромыслом 2 со стороны противовеса позволяет увеличить чувствительность и точность измерения боковых составляющих вектора тяги ЭРД. Кроме того, это может позволить контролировать изменение положения ЭРД относительно подвижного коромысла ТИУ в процессе работы ЭРД, вызванного, в частности, тепловой деформацией элементов конструкции ТИУ, и своевременно вносить поправку в результат измерения боковых составляющих вектора тяги ЭРД.
Итак, предлагаемая конструкция ТИУ позволяет заметно повысить точность измерения боковых составляющих вектора тяги ЭРД за счет использования всех вышеописанных средств.
Литература
1. Masahiko Kameoka, Haruki Takegahara, Yukio Shimizu, Kyoichiro Toki "Single impulse measurement of a coaxial pulsed plasma thruster" 28th Int. Electric Propulsion Conference, Toulouse, Fr. IEPC-03-0093.
2. "Устройство по определению тяги и составляющих вектора тяги электрореактивного двигателя и способ испытаний", патент РФ № 2202773, G01L 5/00, G01M 15/00, 2003 г.
Изобретение относится к силоизмерительной технике, а именно к средствам измерения боковых составляющих вектора тяги электрореактивных двигателей (ЭРД). Устройство включает в себя горизонтально расположенное и подвешенное на упругом на кручение подвесе подвижное коромысло, на одном конце которого через подвижный монтажный узел установлен испытуемый ЭРД, а на другом конце коромысла размещен уравновешивающий противовес. Также устройство имеет оптическое отсчетное устройство, выполненное в виде направленного источника света и индикатора положения луча. Упругий подвес стыкуется с коромыслом через кронштейн, в котором выполнена узкая вертикальная щель, совпадающая с осью упругого подвеса. Дополнительно к этому монтажный узел снабжен отражающим световой луч из источника света зеркалом, плоскость которого параллельна плоскости монтажного узла в месте стыка его с коромыслом. На зеркале нанесен вертикальный указатель, находящийся в одной плоскости с осью монтажного узла в месте стыка его с коромыслом. Источник света расположен таким образом, что исходящий из него луч попадает через щель на зеркало, а отраженный от зеркала луч попадает на индикатор положения луча. Технический результат заключается в повышении точности измерения боковых составляющих вектора тяги ЭРД. 3 з.п. ф-лы, 1 ил.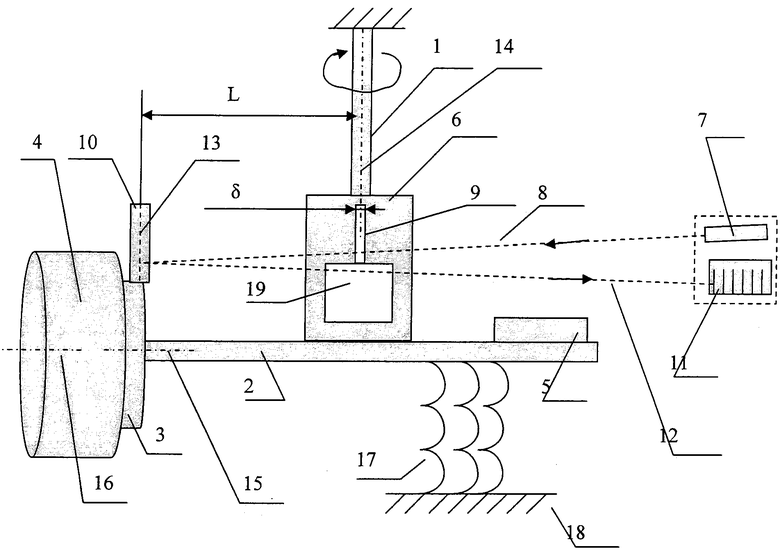
1. Устройство для определения боковых составляющих вектора тяги электрореактивного двигателя (ЭРД), содержащее горизонтально расположенное и подвешенное на упругом на кручение подвесе подвижное коромысло, на одном конце которого через подвижный монтажный узел установлен испытуемый ЭРД, а на другом конце коромысла размещен уравновешивающий противовес, и отсчетное устройство оптического типа, снабженное источником света и индикатором положения луча, отличающееся тем, что упругий подвес стыкуется с коромыслом через кронштейн, в котором выполнена узкая вертикальная щель, совпадающая с осью упругого подвеса, монтажный узел снабжен зеркалом, плоскость которого параллельна плоскости монтажного узла в месте стыка его с коромыслом, зеркало снабжено вертикальным указателем, находящимся в одной плоскости с осью монтажного узла в месте стыка его с коромыслом, причем источник света расположен таким образом, что исходящий из него луч попадает через щель на зеркало, а отраженный от зеркала луч попадает на индикатор положения луча.
2. Устройство по п.1, отличающееся тем, что ширина щели в кронштейне не менее чем на три порядка меньше длины части коромысла от монтажного узла до кронштейна.
3. Устройство по п.1, отличающееся тем, что в кронштейне рядом с щелью для прохода светового луча выполнено окно, ширина которого много больше ширины щели.
4. Устройство по п.1, отличающееся тем, что устройство отсчета расположено за коромыслом со стороны противовеса.
| УСТРОЙСТВО ПО ОПРЕДЕЛЕНИЮ ТЯГИ И СОСТАВЛЯЮЩИХ ВЕКТОРА ТЯГИ ЭЛЕКТРОРЕАКТИВНОГО ДВИГАТЕЛЯ И СПОСОБ ИСПЫТАНИЙ | 2001 |
|
RU2202773C2 |
| СПОСОБ ИСПЫТАНИЙ ЭЛЕКТРОРЕАКТИВНОГО ДВИГАТЕЛЯ ПО ОПРЕДЕЛЕНИЮ ТЯГИ И СОСТАВЛЯЮЩИХ ВЕКТОРА ТЯГИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2243516C2 |
| Masahiko Kameoka, Haruki Takegahara, Yukio Shimizu, Kyoichiro Toki "Single impulse measurement of a coaxial pulsed plasma thruster" 28th Int | |||
| Electric Propulsion Conference, Toulouse, Fr | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

