Изобретение относится к силоизмерительной технике, а именно к средствам измерения тяги электрореактивных двигателей (ЭРД), в частности, плазменных ускорителей с замкнутым дрейфом электронов, и может также использоваться для измерения тяги самых различных устройств, являющихся генераторами плазменных струй.
При проведении исследований различных типов ЭРД на современном техническом уровне все острее стоит задача определения не только величины, но и направления вектора тяги ЭРД, то есть определения не только основной, но и боковых составляющих вектора тяги ЭРД. Для этой цели могут быть использованы только тягоизмерительные устройства (ТИУ), обладающие высокой чувствительностью измерения усилий.
Известно ТИУ для измерения трех компонент вектора тяги ЭРД, представляющее собой шарнирную подвеску, на подвижную платформу которой устанавливается ЭРД [1]. Это ТИУ позволяет измерять как основную компоненту вектора тяги ЭРД, так и боковые составляющие вектора тяги. ТИУ снабжено устройством отсчета величины измеряемого усилия и устройством калибровки, позволяющим нагружать ТИУ усилиями, соответствующими, в том числе, боковым составляющим вектора тяги ЭРД. Однако данное устройство имеет очень сложную конструкцию, что приводит к неудобствам при его эксплуатации, требует применения специальных шарнирных соединений с малым коэффициентом трения в опорах [1]. Устройство отличается невысокой помехоустойчивостью. В связи с расположением ЭРД в непосредственной близости от чувствительного элемента ТИУ в таком ТИУ возможны воздействия работающего ЭРД на чувствительный элемент ТИУ, то есть возможны так называемые "наводки" на показания ТИУ.
Существенно более простым устройством, способным измерять малые величины усилий, создаваемые ЭРД (менее 10 мН), является ТИУ, выполненное по схеме крутильных весов [2]. Такого рода ТИУ содержит горизонтально расположенное и подвешенное на упругом на кручение подвесе подвижное коромысло, на одном конце которого установлен испытуемый ЭРД, а на другом конце - уравновешивающий противовес. ТИУ содержит также отсчетное устройство, регистрирующее крутящий момент. Это ТИУ конструктивно проще ТИУ, выполненного в соответствии с [1], и удобнее в эксплуатации. При использовании значительных размеров плеч коромысла (около 1 м) чувствительность измерения усилий в такого рода ТИУ может быть довольно высокой и в принципе достаточной для определения величин боковых составляющих вектора тяги ЭРД. Однако это ТИУ не предназначено для измерения боковых составляющих вектора тяги ЭРД. Поэтому оно не снабжено рядом дополнительных устройств, направленных на повышение точности измерения малых усилий.
Наиболее близким к предлагаемому техническому решению по совокупности признаков и принятым за прототип является ТИУ, предназначенное для измерения боковых составляющих вектора тяги ЭРД [3], выполненное в виде крутильных весов. Это устройство содержит горизонтально расположенное и подвешенное на упругом на кручение подвесе подвижное коромысло. На одном конце этого коромысла через подвижный монтажный узел установлен испытуемый ЭРД, а на другом конце размещен уравновешивающий противовес и отсчетное устройство, регистрирующее крутящий момент, который создается прикладываемым к коромыслу усилием от работающего ЭРД или от узла калибровки. В конструкцию ТИУ введен поворотный механизм вращения ЭРД вокруг его продольной геометрической оси, состоящий из узла вращения, содержащего привод и отсчетное устройство контроля угла поворота ЭРД, и монтажный узел, на котором размещен испытуемый ЭРД. Причем продольная геометрическая ось механизма вращения ЭРД расположена под углом к геометрической оси коромысла.
Такая конструкция ТИУ позволяет путем измерения усилий, создаваемых ЭРД и передаваемых коромыслу ТИУ до поворота, ЭРД и после его поворота, определять величину как основной, так и боковых составляющих тяги ЭРД. Так как поворот ЭРД вокруг своей оси осуществляется дистанционно, то это позволяет получать значения как основной, так и боковых составляющих тяги ЭРД без разгерметизации вакуумной камеры экспериментальной установки в течение одного эксперимента, что повышает как его информативность, так и скорость получения результата измерений.
Однако такая конструкция ТИУ не лишена некоторых недостатков. Прежде всего, она требует применения достаточно сложного по конструкции поворотного механизма вращения ЭРД вокруг его оси. Этот поворотный механизм в свою очередь вносит дополнительную погрешность измерения при определении боковых составляющих тяги ЭРД. Так как продольная геометрическая ось ЭРД при установке на данное ТИУ расположена под углом к оси коромысла, то это приводит к несимметричному расположению ЭРД как к самому ТИУ, так и к отсекам вакуумной камеры, в которой проводятся испытания по измерению боковых составляющих тяги ЭРД. Такая несимметричность может привести к появлению добавочных боковых усилий на ТИУ, связанных с несимметричностью экспериментальной установки в целом.
После установки ЭРД на ТИУ с целью обеспечения высокой точности измерения боковых составляющих вектора тяги ЭРД, учитывая их чрезвычайно малые величины (1…100 мг), крайне полезно провести проверку ТИУ. Проверка заключается в нагружении коромысла ТИУ усилием, строго равным по величине и направлению величине и направлению основной составляющей вектора тяги ЭРД, с последующим контролем за изменением показаний ТИУ. Если при данном нагружении будет происходит изменение показаний ТИУ, то это будет свидетельствовать о том, что возникновение основной компоненты тяги ЭРД приводит к погрешности в измерении боковых составляющих ЭРД.
В целом ряде существующих на настоящий момент ТИУ, как правило, присутствует узел калибровки, представляющий собой устройство для нагружения ТИУ мерными усилиями. Однако этот узел служит только для проверки чувствительности ТИУ в направлении измеряемого данным ТИУ усилия и калибровки его в этом направлении. Для проверки чувствительности или калибровки ТИУ нагружают мерным (тарировочным) усилием, направленным строго в направлении измеряемого данным ТИУ усилия, но не в перпендикулярных к нему направлениях.
Таким образом, применительно к задаче точного измерения боковых составляющих вектора тяги ЭРД отсутствие в составе ТИУ устройства, позволяющего нагружать ТИУ дополнительным усилием, строго равным по величине и направлению величине и направлению основной составляющей вектора тяги ЭРД, то есть в строго перпендикулярном к боковым составляющим вектора тяги ЭРД направлении, не дает возможности осуществить точную проверку отсутствия влияния возникновения основной составляющей вектора тяги ЭРД при его включении на показания ТИУ, служащие для определения боковых составляющих вектора тяги.
В связи с этим для более точного определения боковых составляющих тяги ЭРД целесообразно использовать ТИУ типа коромысловых весов более простой конструкции, в котором ось ЭРД располагалась бы по оси коромысла. В таком ТИУ возникновение основной составляющей вектора тяги ЭРД при его включении не должно приводить к изменению показаний ТИУ, служащих для определения боковых составляющих вектора тяги. Конечно, в этом случае ТИУ обеспечивает измерение только боковых составляющих вектора тяги, сначала определяется одна боковая составляющая вектора тяги, а затем после поворота ЭРД на 90 градусов вдоль его оси определяется вторая боковая составляющая. Основная же составляющая вектора тяги ЭРД определяется при использовании другого ТИУ.
Целью изобретения является повышение точности измерения боковых составляющих вектора тяги ЭРД с помощью ТИУ типа крутильных весов путем проверки отсутствия влияния основной составляющей вектора тяги ЭРД на показания ТИУ при измерении боковых составляющих вектора тяги ЭРД, а при наличии этого влияния его учета и даже полного устранения.
Указанная цель достигается тем, что в ТИУ типа крутильных весов, содержащем горизонтально расположенное и подвешенное на упругом на кручение подвесе подвижное коромысло, на одном конце которого через монтажный узел установлен испытуемый ЭРД, а на другом конце размещен уравновешивающий противовес, узел калибровки, отсчетное устройство, регистрирующее крутящий момент, согласно изобретению в состав ТИУ введен узел нагружения коромысла дополнительным усилием, приложенным к монтажному узлу ЭРД, причем это усилие приложено в точке монтажного узла, находящейся в одной вертикальной плоскости с геометрической осью ЭРД, направление его проходит через ось упругого подвеса, а величина этого усилия равна величине основной составляющей вектора тяги ЭРД.
Узел нагружения коромысла дополнительным усилием может быть выполнен в виде нити, один конец которой крепится к монтажному узлу в точке, находящейся в одной вертикальной плоскости с геометрической осью ЭРД, а второй перекинут через блок и содержит на конце груз, служащий для нагружения нити мерным усилием.
В месте стыка коромысла с упругим подвесом может крепиться перпендикулярно к ней горизонтальная плата, на которой устанавливаются дополнительные грузы.
В предлагаемом ТИУ ЭРД устанавливается вдоль оси коромысла, что обеспечивает измерение одной из боковых составляющих вектора тяги ЭРД. Определение второй боковой составляющей вектора тяги ЭРД производится после поворота ЭРД на 90 градусов вдоль его оси.
Приложение дополнительного усилия к монтажному узлу в точке, находящейся в одной вертикальной плоскости с геометрической осью ЭРД, в направлении, проходящем через ось упругого подвеса, позволяет произвести проверку отсутствия влияния основной составляющей вектора тяги ЭРД на показания ТИУ, предназначенного для измерения боковых составляющих вектора тяги ЭРД. Причем величина этого усилия для полноты учета этого влияния должна быть равна величине основной составляющей вектора тяги ЭРД.
Для обеспечения имитации основной составляющей вектора тяги ЭРД как по величине, так и по направлению целесообразно дополнительное усилие приложить к монтажному узлу, на который устанавливается ЭРД. В этом случае это усилие следует приложить в точке монтажного узла, находящейся в одной вертикальной плоскости с геометрической осью ЭРД, причем направление этого усилия должно проходить через ось упругого подвеса. Тогда возникновение этого дополнительного усилия с теоретической точки зрения не должно приводить к возникновению крутящего момента на коромысло ТИУ, то есть к изменению показаний ТИУ.
Однако по целому ряду причин, например, не идеальности упругого подвеса (в том числе несовпадении оси подвеса с действительной осью кручения коромысла), недостаточно высокой сбалансированности коромысла ТИУ, наличием далеких от идеальности коммуникационных линий, связывающих подвижное коромысло с неподвижной частью ТИУ и др. даже при приложении этого дополнительного усилия, равного по величине и направлению тяге ЭРД, может возникнуть некоторый крутящий момент, воздействующий на коромысло ТИУ. Ведь величина основной составляющей вектора тяги ЭРД, как показывает большинство измерений, как правило, в 100…1000 раз больше величины боковой составляющей вектора тяги ЭРД. Этот крутящий момент приведет к изменению показаний ТИУ, которые при испытании ЭРД будут оценены как величины, соответствующие боковой составляющей вектора тяги ЭРД.
Если не учитывать результаты такой проверки, то в целом это может заметно понизить точность измерения боковых составляющих вектора тяги ЭРД.
Если результат проверки показал, что приложение такого дополнительного усилия приводит к возникновению паразитного крутящего момента или паразитного бокового усилия на коромысло ТИУ, то есть к изменению показаний ТИУ, то ее следует либо учесть уже непосредственно при проведении измерений боковых составляющих вектора тяги ЭРД, либо исключить некоторой дополнительной настройкой ТИУ.
Учесть паразитное боковое усилие можно в виде поправки к результатам последующих измерения боковых составляющих вектора тяги ЭРД, равной величине изменения сигнала ТИУ при приложении дополнительного усилия. Эту поправку следует вычитать из результатов измерения боковых составляющих вектора тяги ЭРД.
Однако эту поправку можно исключить путем дополнительной настройки ТИУ. Для этого в месте стыка коромысла с упругим подвесом целесообразно закрепить перпендикулярно к коромыслу горизонтальную плату. Установкой на эту плату дополнительных грузов можно добиться полного исключения изменения сигнала ТИУ при приложении к нему дополнительного усилия, имитирующего по величине и направлению тягу ЭРД.
Наиболее простым и надежным устройством для создания этого дополнительного усилия может служить узел нагружения, выполненный в виде нити, один конец которой крепится к монтажному узлу в точке, находящейся в одной вертикальной плоскости с геометрической осью ЭРД, а второй перекинут через блок и содержит на конце груз, служащий для нагружения нити мерным усилием, равным по величине основной составляющей тяги ЭРД.
Сущность изобретения поясняется схемой, представленной на фиг.1 и 2.
ТИУ содержит горизонтально расположенное и подвешенное на упругом на кручение подвесе 1 подвижное коромысло 2, на одном конце которого через подвижный монтажный узел 3 установлен испытуемый ЭРД 4, а на другом конце коромысла размещен уравновешивающий противовес 5. Устройство содержит также отсчетное устройство 6, регистрирующее крутящий момент, воздействующий на коромысло 2 ТИУ, и узел калибровки 7, служащий для проверки чувствительности ТИУ в направлении измеряемого данным ТИУ усилия и калибровки его в этом направлении.
Устройство снабжено узлом нагружения коромысла 2 дополнительным усилием, приложенным к монтажному узлу 3 ЭРД 4. На фиг.1 изображен узел нагружения, выполненный в виде нити 8, один конец которой крепится к монтажному узлу 3 в точке, находящейся в одной вертикальной плоскости с геометрической осью 9 ЭРД 4 , а второй перекинут через блок 10 и содержит на конце устройство, служащее для нагружения нити 8 мерным усилием. На фиг.1 это устройство представлено в виде чашки 11, в которую периодически опускается мерный груз 12, равный по величине основной составляющей вектора тяги ЭРД. Блок 10 с помощью подвижного кронштейна 13 имеет возможность перемещаться относительно упругого подвеса 1.
Узел нагружения коромысла 2 позволяет прикладывать дополнительное усилие в точке монтажного узла 3, находящейся в одной вертикальной плоскости с геометрической осью 9 ЭРД 4. Причем путем регулировки положения блока 10 с помощью кронштейна 13 этот узел позволяет устанавливать такое положение нити 8, которое обеспечивает приложение дополнительного усилия через геометрическую ось 14 упругого подвеса 1.
На фиг.1 показаны также гибкие коммуникационные линии 15 (электрические, газовые), служащие для обеспечения работы ЭРД и связывающие подвижное коромысло 2 с неподвижной частью 16 ТИУ.
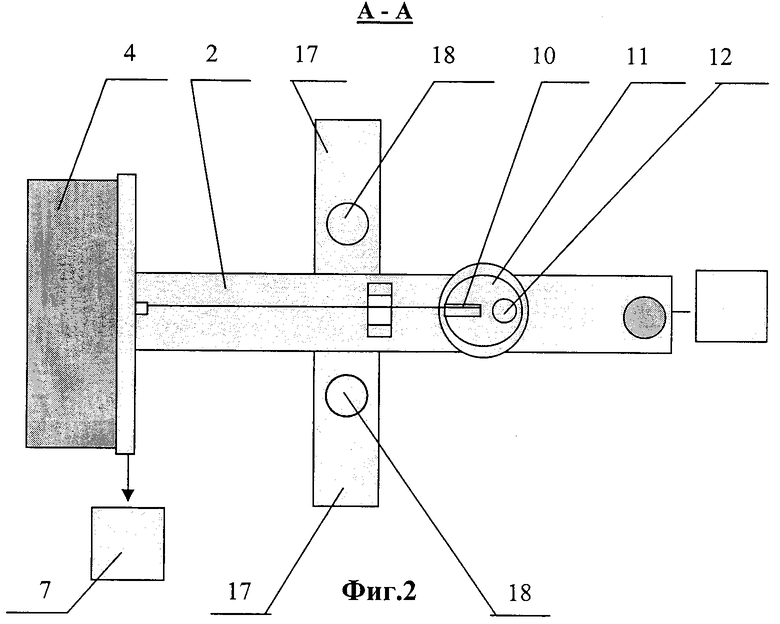
В месте стыка коромысла 2 с упругим подвесом 1 перпендикулярно к коромыслу 2 крепится горизонтальная плата 17 (состоящая из двух частей, см. фиг.2), на которой устанавливаются дополнительные грузы 18, служащие для дополнительной настройки ТИУ с целью исключения паразитного крутящего момента на коромысло ТИУ, который может возникнуть при приложении к ТИУ дополнительного усилия, равного по величине и направлению основной составляющей вектора тяги ЭРД.
Для обеспечения совмещения нити 8 с осью 14 упругого подвеса 1 упругий подвес, как показано на фиг.1 и 2, может стыковаться с платой 19, имеющей отверстие 20 для прохода нити 8. Плата 19 при этом стыкуется с коромыслом 2.
Устройство для определения боковых составляющих вектора тяги ЭРД работает следующим образом. ЭРД 4 устанавливают через подвижный монтажный узел 3 на подвижное коромысло 2. На другой конец коромысла 2 устанавливают противовес 5 и с его помощью производят балансировку коромысла 2. Далее, как показано на фиг.1, после стабилизации положения коромысла 2 производят совмещение нити 8 с осью 14 упругого подвеса 1 с помощью подвижного кронштейна 13, который дает возможность переместить блок 10 для обеспечения этого совмещения.
Данное совмещение может быть сделано с достаточно высокой точностью, поскольку длина коромысла ТИУ составляет, как правило, величину L~1 м, а ошибка в установке нити 8 относительно оси 14 упругого подвеса 1 в предлагаемой конструкции ТИУ даже при визуальном способе такой установки составляет δ~0,5 мм.
Тогда при последующем приложении дополнительного усилия к коромыслу 2 ТИУ, равного по величине и направлению основной составляющей F вектора тяги ЭРД 4, максимальная величина паразитного бокового усилия на коромысло 2, которое может вызвать изменение показаний ТИУ, составит величину

что является очень малой величиной и соответствует всего лишь ошибке установки ~ ±1,8 угловых минут при определении направления вектора тяги ЭРД (вполне допустимая погрешность, так как обычно полная погрешность измерения боковой составляющей вектора тяги ЭРД составляет не менее ~ ±15 угловых минут).
Далее производят измерение сигнала ТИУ, соответствующее начальному, ненагруженному его состоянию - F0 тяги. После этого производят нагружение ТИУ дополнительным усилием, равным по величине и направлению основной составляющей F вектора тяги ЭРД 4 с использованием узла нагружения. Это может быть выполнено посредством опускания мерного груза 12 в чашку 11. Затем производят измерение сигнала ТИУ, соответствующего нагруженному его состоянию от усилия, равного по величине и направлению основной составляющей вектора тяги ЭРД - Fосн.тяга.
После этого определяют разность этих сигналов Fосн.тяга - F0 тяги, которая и определяет величину паразитного бокового усилия Δ F осн.тяга, связанного с влиянием основной составляющей вектора тяги ЭРД на показания ТИУ при измерении боковых составляющих вектора тяги ЭРД.
Если определенная таким образом величина  Fосн.тяга не превышает определенную ранее по выражению (1) ошибку установки
Fосн.тяга не превышает определенную ранее по выражению (1) ошибку установки  Fбок.0, то это означает, что значение паразитного бокового усилия, связанного с влиянием основной составляющей вектора тяги ЭРД на показания ТИУ при измерении боковых составляющих вектора тяги ЭРД, не превосходит величину Fбок.0. В этом случае влияние основной составляющей вектора тяги ЭРД на показания ТИУ признается незначительным, вполне допустимым.
Fбок.0, то это означает, что значение паразитного бокового усилия, связанного с влиянием основной составляющей вектора тяги ЭРД на показания ТИУ при измерении боковых составляющих вектора тяги ЭРД, не превосходит величину Fбок.0. В этом случае влияние основной составляющей вектора тяги ЭРД на показания ТИУ признается незначительным, вполне допустимым.
Поэтому после этого производят предстартовую калибровку ТИУ с использованием устройства калибровки, затем включают ЭРД и производят измерение боковых составляющих его вектора тяги.
Если же определенная таким образом величина Fосн.тяга превышает определенную ранее по выражению (1) ошибку установки Fбок.0 то это означает, что приложение такого дополнительного усилия приводит к возникновению заметного паразитного бокового усилия на коромысло ТИУ и может при игнорировании этого обстоятельства привести в итоге к понижению точности измерения боковых составляющих вектора тяги ЭРД.
Этот эффект можно учесть в виде поправки, которую следует вычитать из результатов измерения боковых составляющих вектора тяги ЭРД. Величина поправки в этом случае равна величине изменения сигнала ТИУ при приложении дополнительного усилия.
Но более предпочтительным является сведение к нулю этой поправки или исключение ее из результатов измерений путем некоторой дополнительной настройки. ТИУ. Настройка заключается в том, чтобы выставленная перед этим и находящаяся в единой вертикальной плоскости с геометрической осью 14 упругого подвеса 1 нить 8 находилась бы теперь в единой вертикальной плоскости с действительной осью кручения коромысла 2 или действительной кинематической осью упругого подвеса 1. С этой целью в данном случае производят установку дополнительных грузов 18 на горизонтальную плату 17 (фиг.2) таким образом, чтобы они обеспечили некоторое смещение действительной оси кручения коромысла 2 упругого подвеса 1 до совмещения ее с геометрической осью 14 подвеса 1.
В этом случае обеспечивается полное исключение паразитного крутящего момента на коромысло 2 ТИУ, который возникает при возникновении основной составляющей вектора тяги ЭРД 4, и внесение поправки в результат измерения боковой составляющей вектора тяги ЭРД становится ненужным.
Таким образом, использование настоящего изобретения позволяет повысить точность измерения боковых составляющих вектора тяги ЭРД с помощью ТИУ типа крутильных весов путем проверки отсутствия влияния основной составляющей вектора тяги ЭРД на показания ТИУ при измерении боковых составляющих вектора тяги ЭРД, а при наличии этого влияния его учета и даже полного устранения.
Источники информации
1. Е.В.Hughes, S.Oldfield "Traceable calibration of the 3-axis thrust vector in the millinewton range" 4th Int. Spacecraft Propulsion Conference, Italy, 2004.
2. Masahiko Kameoka, Haruki Takegahara, Yukio Shimizu, Kyoichiro Toki "Single impulse measurement of a coaxial pulsed plasma thruster" 28th Int. Electric Propulsion Conference, Toulouse, Fr. IEPC-03-0093.
3. "Устройство по определению тяги и составляющих вектора тяги электрореактивного двигателя и способ испытаний" Патент РФ № 2202773, G01L 5/00, G01М 15/00, 2003 г.
Изобретение относится к силоизмерительной технике, а именно к средствам измерения боковых составляющих вектора тяги электрореактивных двигателей (ЭРД). Устройство включает в себя горизонтально расположенное и подвешенное на упругом на кручении подвесе подвижное коромысло, на одном конце которого через подвижный монтажный узел установлен испытуемый ЭРД, а на другом конце размещен уравновешивающий противовес. Устройство имеет также отсчетное устройство, регистрирующее крутящий момент и устройство калибровки. Дополнительно в устройство введен узел нагружения коромысла дополнительным усилием, приложенным к монтажному узлу ЭРД. Это усилие приложено в точке монтажного узла, находящейся в одной вертикальной плоскости с геометрической осью ЭРД, а направление его проходит через ось упругого подвеса. Величина этого усилия равна величине основной составляющей вектора тяги ЭРД. Технический результат заключается в повышении точности измерения боковых составляющих вектора тяги ЭРД. 2 з.п. ф-лы, 2 ил.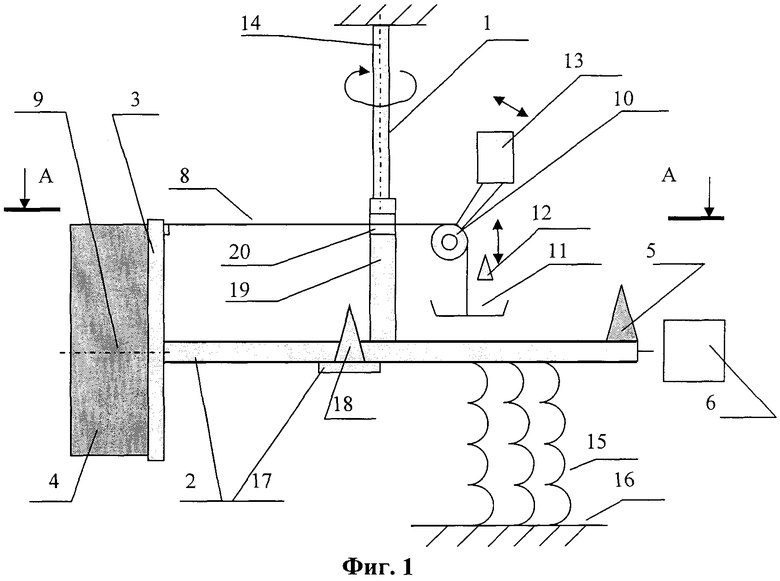
1. Устройство для определения боковых составляющих вектора тяги электрореактивного двигателя (ЭРД), содержащее горизонтально расположенное и подвешенное на упругом на кручение подвесе подвижное коромысло, на одном конце которого через подвижный монтажный узел установлен испытуемый ЭРД, а на другом конце размещен уравновешивающий противовес, узел калибровки и отсчетное устройство, регистрирующее крутящий момент, отличающееся тем, что в состав устройства введен узел нагружения коромысла дополнительным усилием, приложенным к монтажному узлу ЭРД, причем это усилие приложено в точке монтажного узла, находящейся в одной вертикальной плоскости с геометрической осью ЭРД, направление его проходит через ось упругого подвеса, а величина этого усилия равна величине основной составляющей вектора тяги ЭРД.
2. Устройство по п.1, отличающееся тем, что узел нагружения коромысла дополнительным усилием выполнен в виде нити, один конец которой крепится к монтажному узлу в точке, находящейся в одной вертикальной плоскости с геометрической осью ЭРД, а второй перекинут через блок и содержит на конце груз, служащий для нагружения нити мерным усилием.
3. Устройство по п.2, отличающееся тем, что в месте стыка коромысла с упругим подвесом крепится перпендикулярно к ней горизонтальная плата, на которой устанавливаются дополнительные грузы.
| УСТРОЙСТВО ПО ОПРЕДЕЛЕНИЮ ТЯГИ И СОСТАВЛЯЮЩИХ ВЕКТОРА ТЯГИ ЭЛЕКТРОРЕАКТИВНОГО ДВИГАТЕЛЯ И СПОСОБ ИСПЫТАНИЙ | 2001 |
|
RU2202773C2 |
| СПОСОБ ИСПЫТАНИЙ ЭЛЕКТРОРЕАКТИВНОГО ДВИГАТЕЛЯ ПО ОПРЕДЕЛЕНИЮ ТЯГИ И СОСТАВЛЯЮЩИХ ВЕКТОРА ТЯГИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2243516C2 |
| Masahiko Kameoka, Haruki Takegahara, Yukio Shimizu, Kyoichiro Toki "Single impulse measurement of a coaxial pulsed plasma thruster" 28th Int | |||
| Electric Propulsion Conference, Toulouse, Fr | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| E.B | |||
| Hughes, S | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Spacecraft Propulsion Conference, Italy, 2004. | |||

