Изобретение относится к устройствам с изменяющейся ориентацией диаграммы направленности волн, излучаемых антенной, при неподвижном облучателе антенны, а именно к поворотно-чувствительным устройствам, основанным на использовании акселерометров и гироскопических приборов, обеспечивающим инерциальное измерение параметров вектора визирования неподвижной точки прицеливания (ТП), т.е. неподвижного объекта визирования (ОВ).
Изобретение предназначено для формирования сигналов инерциального управления направлением зеркала антенного устройства на неподвижный ОВ, назначенный при предстартовой подготовке подвижного носителя для наведения на него направления зеркала антенного устройства, с одновременным формированием сигналов самонаведения подвижного носителя на неподвижный ОВ и может быть использовано:
- в системах инерциального измерения параметров вектора визирования ОВ;
- в системах пеленгации и автосопровождения ОВ, которые являются одними из основных составных частей высокоточной интегрированной комплексированной бортовой системы самонаведения (БССН) подвижных носителей, в том числе, вращающихся по крену.
При создании высокоточных подвижных носителей БССН, содержащих в своем составе антенное устройство, важной задачей является обеспечение качественного инерциального управления направлением на неподвижный ОВ зеркала антенного устройства на автономном участке траектории самонаведения подвижного носителя, а также качественной ориентации диаграммы направленности волн излучаемый антенной, основание которого жестко закреплено внутри корпуса вращающегося по крену подвижного носителя, при качественной стабилизации (от аддитивных короткопериодических колебаний) направления зеркала антенного устройства на ОВ и одновременно обеспечение при этом высокоточного самонаведения вращающегося подвижного носителя по направлению к ОВ.
Известны различные способы формирования сигналов управления направлением зеркала антенного устройства (см., например, В.М.Артамонов. Следящие системы радиолокационных станций автоматического сопровождения и управления. - Изд. «Судостроение», Л., 1969г., - с.12-24, 41-52; В.А.Бесекерский, Е.А.Фабрикант. Динамический синтез систем гироскопической стабилизации. - Изд. «Судостроение», Л., 1968г., - с.283-288; Радиоуправление реактивными снарядами и космическими аппаратами. - Под общей редакцией Л.С.Гуткина. - Изд. «Советское радио», М., 1968 г., - с.118-130):
- способ радиотехнического формирования сигналов управления направлением зеркала антенного устройства, при котором сигналы управления формируются путем пеленгации и радиолокационного автосопровождения ОВ:
- по принципу выделения сигнала рассогласования (ошибки) при коническом сканировании (вращении) диаграммы направленности высокочастотной электромагнитной энергии, излучаемой антенной в виде так называемого иглообразного (острого) луча,
- моноимпульсного типа, позволяющий определять относительные текущие угловые координаты ОВ, т.е. при автосопровождении в двух взаимно перпендикулярных плоскостях образуются два разностных сигнала и один суммарный сигнал;
- два отдельных напряжения рассогласования (ошибки) по азимуту и по углу наклона, а также напряжения, пропорциональные приращению по дальности до ОВ;
- способы формирования сигналов управления, основанные на использовании энергии, идущей от ОВ к подвижному носителю, например тепловые лучи или радиоволны, излучаемые ОВ, и световые лучи, отраженные от подсвечиваемого ОВ или излучаемые ОВ.
Однако упомянутые способы обладают теми существенными недостатками, что при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем не могут обеспечить:
- формирование сигналов управления направлением зеркала антенного устройства на ОВ и, следовательно, формирование сигналов самонаведения подвижного носителя на ОВ, расположенный на дальности, превышающей дальность действия, например, радиолокационной части БССН;
- абсолютную помехозащищенность при радиолокационном контакте с ОВ от пассивного и/или организованного радиоэлектронного противодействия;
- необходимую длительную навигационную память координат ОВ после срыва автосопровождения ОВ.
Известна также «Система стабилизации и управления линией визирования антенны» (патент RU №2282230 C1, 2004.12.27), содержащая антенну, устройство гиростабилизации, вычислительное устройство и инерциальную навигационную систему (ИНС). Использование указанных устройств данной системы, по мнению авторов патента, позволяет обеспечить «расширение динамического диапазона стабилизации и управление линией визирования РЛС. Для достижения данного результата введена система контроля состояния подвижного зеркала антенны. При этом измеряют углы визирования РЛС в инерциальной системе координат, скорость сканирования, углы крена, тангажа и рыскания ЛА, полученных от ИНС», невращающегося вокруг продольной строительной оси симметрии. Известная система не может выполнять указанные в патенте функции при круговом вращении основания антенны вместе с вращающимся по крену ЛА, что является существенным недостатком.
Кроме того, известны «Способ и устройство для управления антенной» (патент US №6529161 ВВ, 22.08.2001), содержащие «блок управления направленностью луча антенны, внутреннюю навигационную систему для получения информации о движении мобильного объекта, блок для расчета направленности луча на основе информации из навигационной системы с целью наведения луча на геостационарный спутник, блок для отдельного получения информации о движении мобильного объекта и блок для оценки задержки между информацией о движении из предыдущего блока и аналогичной информацией из навигационной системы. Блок для отдельного получения информации о движении содержит трехосевой датчик угловой скорости или трехосевой магнитный датчик». Из приведенного реферата следует, что предложенные способ и устройство не предназначены и, следовательно, не обеспечивают выполнение заявленных функций при круговом вращении основания антенны вместе с вращающимся по крену мобильным объектом, на котором установлена антенна, что является также существенным недостатком.
Известно «Направленное антенное устройство» (патент JP №3232378 В2, 17.12.1992), которое «содержит: установленную на опоре антенну, имеющую центральную ось; азимутальный карданный шарнир, поддерживающий антенну вместе с опорой во вращении вокруг оси угла места, ортогональной центральной оси; постамент, поддерживающий шарнир во вращении вокруг азимутальной оси, ортогональной оси угла места; первый гироскоп, зафиксированный к опоре, ось ведущего вала которого параллельна оси угла места; второй гироскоп, зафиксированный к опоре, ось ведущего вала которого ортогональна к центральной оси и оси угла места; акселерометр, формирующий сигнал, выражающий угол наклона центральной оси относительно горизонтальной плоскости; генератор азимута, формирующий сигнал, выражающий угол поворота шарнира вокруг азимутальной оси. Сигнал, полученный вычитанием величины, соответствующей углу места спутника, из выходного сигнала акселерометра, воздействует через аттенюатор по цепи обратной связи на реальный крутящий момент первого гироскопа. Сигнал отклонения азимута, полученный суммированием выходного сигнала генератора азимута с сигналом, соответствующим азимуту носа судна и азимуту спутника, воздействует через другой аттенюатор по цепи обратной связи на реальный крутящий момент второго гироскопа. В результате центральная ось антенны направляется на спутник». Однако направленное антенное устройство не может обеспечить заявленных функций в условиях кругового вращения основания (постамента) антенного устройства вместе с вращающимся по крену носителем антенного устройства.
Следовательно, ни один из рассмотренных выше аналогов не может быть принят наиболее близким по технической сущности и назначению в качестве прототипа предлагаемых технических решений (способа и системы для его осуществления).
Целью заявляемых технических решений (способ и система для его осуществления) является при круговом вращении основания антенного устройства, установленного жестко внутри вращающегося по крену подвижного носителя, обеспечение инерциального управления направлением зеркала антенного устройства на неподвижный ОВ, начальные координаты которого назначены при предстартовой подготовке подвижного носителя, с одновременным формированием сигналов автономного самонаведения подвижного носителя на неподвижные ОВ и определением для этого сигналов, пропорциональных текущим значениям параметров вектора визирования неподвижного ОВ, а именно:
- наклонной дальности и наклонной скорости сближения с неподвижным ОВ вращающегося основания антенного устройства вместе с вращающимся по крену подвижным носителем,
- составляющих пространственной угловой координаты неподвижного ОВ в базовой антенной системе координат, т.е. рассогласованию (ошибке) между оптической осью антенного устройства и направлением на неподвижный ОВ в двух взаимно перпендикулярных плоскостях,
- скорости изменения углов визирования неподвижного ОВ, характеризующих текущее направление зеркала антенного устройства на неподвижный ОВ в горизонтальной и в вертикальной плоскости,
- угла наклона и азимута (пеленгов) относительно основания антенного устройства или, что то же самое, относительно корпуса подвижного носителя.
Сущность изобретения заключается в том, что по предлагаемому способу при круговом вращении основания антенного устройства, установленного жестко внутри корпуса вращающегося по крену подвижного носителя, формируют длиннопериодические управляющие сигналы, пропорциональные скорости  и
и  изменения углов визирования, определяющих текущее направление зеркала антенного устройства на неподвижный ОВ в горизонтальной и в вертикальной плоскости (фиг.1, 3). Для этого во время предстартовой подготовки подвижного носителя антенного устройства с целью выполнения инерциального управления направлением его зеркала на неподвижный ОВ при перемещении после старта вращающегося по крену подвижного носителя по траектории определяют и задают сигналы, пропорциональные начальным координатам L0,
изменения углов визирования, определяющих текущее направление зеркала антенного устройства на неподвижный ОВ в горизонтальной и в вертикальной плоскости (фиг.1, 3). Для этого во время предстартовой подготовки подвижного носителя антенного устройства с целью выполнения инерциального управления направлением его зеркала на неподвижный ОВ при перемещении после старта вращающегося по крену подвижного носителя по траектории определяют и задают сигналы, пропорциональные начальным координатам L0, 
 взаимного положения подвижного носителя и первоначально назначенного неподвижного ОВ (фиг.4). Затем формируют сигналы в виде пакета последовательных информационных слов, содержащего начальные значения:
взаимного положения подвижного носителя и первоначально назначенного неподвижного ОВ (фиг.4). Затем формируют сигналы в виде пакета последовательных информационных слов, содержащего начальные значения:
- угла наклона  и азимута
и азимута  назначенного неподвижного ОВ относительно основания антенного устройства в связанной с центром масс подвижного носителя системе координат (фиг.4);
назначенного неподвижного ОВ относительно основания антенного устройства в связанной с центром масс подвижного носителя системе координат (фиг.4);
- наклонной дальности L0 до неподвижного ОВ и наклонной скорости  сближения с неподвижным ОВ основания антенного устройства вместе с подвижным носителем в предстартовом его положении (фиг.1);
сближения с неподвижным ОВ основания антенного устройства вместе с подвижным носителем в предстартовом его положении (фиг.1);
- рыскания  тангажа
тангажа  и крена γ0 подвижного носителя вместе с основанием антенного устройства (фиг.5),
и крена γ0 подвижного носителя вместе с основанием антенного устройства (фиг.5),
а также начальные условия выставки инерциального измерения параметров вектора визирования неподвижного ОВ, т.е. сигналы, пропорциональные начальным значениям:
- проекции 

 вектора
вектора  линейной скорости предстартового перемещения основания антенного устройства вместе с подвижным носителем на соответствующие оси местной горизонтальной системы координат Оξηζ (фиг.1),
линейной скорости предстартового перемещения основания антенного устройства вместе с подвижным носителем на соответствующие оси местной горизонтальной системы координат Оξηζ (фиг.1),
- декартовых координат ξ0, η0, ζ0 подвижного носителя в местной горизонтальной системе координат Oξηζ (фиг.1),
- долготы λ0 и географической широты φ0 подвижного носителя
и, кроме того, сигналы, пропорциональные необходимым режимным параметрам по дальности, контрольное слово, командное слово.
Далее проверяют сформированные сигналы в виде пакета последовательных информационных слов на отсутствие в них искажений. После этого сигналы, характеризующие пакет последовательных информационных слов, преобразуют в параллельную форму для инерциального измерения параметров вектора визирования неподвижного ОВ. Далее преобразуют сигналы, пропорциональные заданным начальным условиям выставки инерциального измерения параметров вектора визирования неподвижного ОВ, в сигналы, пропорциональные начальным значениям:
- проекций 

 вектора
вектора  линейной скорости предстартового перемещения основания антенного устройства вместе с подвижным носителем на соответствующие оси базовой антенной системы координат Oxyz (фиг.1, 2),
линейной скорости предстартового перемещения основания антенного устройства вместе с подвижным носителем на соответствующие оси базовой антенной системы координат Oxyz (фиг.1, 2),
- углов εГ и εB визирования назначенного неподвижного ОВ соответственно в горизонтальной и в вертикальной плоскости в местной горизонтальной системе координат Oξηζ, (фиг.1, 3),
- составляющих 
 пространственной угловой координаты
пространственной угловой координаты  неподвижного ОВ в базовой антенной системе координат Oxyz (фиг.1, 2),
неподвижного ОВ в базовой антенной системе координат Oxyz (фиг.1, 2),
- направляющих косинусов  , где i, j=1, 2, 3, определяющих начальное взаимное положение базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Oξ0η0ζ0 связанной одной своей осью Сζ0 с неподвижным ОВ, расположенным на земной поверхности (фиг.1).
, где i, j=1, 2, 3, определяющих начальное взаимное положение базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Oξ0η0ζ0 связанной одной своей осью Сζ0 с неподвижным ОВ, расположенным на земной поверхности (фиг.1).
В момент времени старта подвижного носителя обновление сигналов начальной информации прекращается, и во время начала его движения по траектории с вращением по крену вместе с основанием антенного устройства одновременно измеряют сигналы пропорциональные проекциям 

 вектора
вектора  кажущегося линейного ускорения движения и проекциям
кажущегося линейного ускорения движения и проекциям 

 вектора
вектора  абсолютной угловой скорости поворота зеркала антенного устройства на соответствующие оси системы координат Ox3y3z3, связанной с зеркалом антенного устройства.
абсолютной угловой скорости поворота зеркала антенного устройства на соответствующие оси системы координат Ox3y3z3, связанной с зеркалом антенного устройства.
По этим измеренным сигналам с учетом нелинейной зависимости поворота линии (вектора) визирования неподвижного ОВ по углу наклона и по азимуту от поворота зеркала антенного устройства соответственно по углу наклона и по азимуту, т.е. с учетом так называемой переменной электрической редукции, определяют сигналы, пропорциональные проекциям nх, nу, nz вектора  кажущегося линейного ускорения движения и проекциям ωx, ωy, ωz вектора
кажущегося линейного ускорения движения и проекциям ωx, ωy, ωz вектора  абсолютной угловой скорости поворота вектора визирования неподвижного ОВ на соответствующие оси базовой антенной системы координат Oxyz. Далее формируют по полученным сигналам с учетом сигналов, определенных и заданных во время предстартовой подготовки подвижного носителя, сигналы, пропорциональные текущим значениям параметров вектора визирования неподвижного ОВ, а именно:
абсолютной угловой скорости поворота вектора визирования неподвижного ОВ на соответствующие оси базовой антенной системы координат Oxyz. Далее формируют по полученным сигналам с учетом сигналов, определенных и заданных во время предстартовой подготовки подвижного носителя, сигналы, пропорциональные текущим значениям параметров вектора визирования неподвижного ОВ, а именно:
- проекций Vx, Vy, Vz вектора  линейной скорости сближения с неподвижным ОВ основания антенного устройства вместе с вращающимся по крену подвижным носителем на соответствующие оси базовой антенной системы координат Oxyz,
линейной скорости сближения с неподвижным ОВ основания антенного устройства вместе с вращающимся по крену подвижным носителем на соответствующие оси базовой антенной системы координат Oxyz,
- наклонной дальности L и наклонной скорости  сближения с неподвижным ОВ основания антенного устройства вместе с подвижным носителем, вращающимся по крену,
сближения с неподвижным ОВ основания антенного устройства вместе с подвижным носителем, вращающимся по крену,
- составляющих е1, е2 пространственной угловой координаты  неподвижного ОВ в базовой антенной системе координат Oxyz,
неподвижного ОВ в базовой антенной системе координат Oxyz,
- направляющих косинусов βij, где i, j=1, 2, 3, взаимного текущего углового положения базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Сξ0η0ζ0 связанной одной своей осью Сζ0 с неподвижным ОВ, расположенным на земной поверхности.
По полученным сигналам, пропорциональным текущим значениям наклонной дальности L и наклонной  скорости сближения с неподвижным ОВ основания антенного устройства вместе с вращающимся по крену подвижным носителем, осуществляют инерциальное автосопровождение неподвижного ОВ по дальности, а по полученным сигналам, пропорциональным текущим значениям составляющих е1, е2 пространственной угловой координаты
скорости сближения с неподвижным ОВ основания антенного устройства вместе с вращающимся по крену подвижным носителем, осуществляют инерциальное автосопровождение неподвижного ОВ по дальности, а по полученным сигналам, пропорциональным текущим значениям составляющих е1, е2 пространственной угловой координаты  неподвижного ОВ в базовой антенной системе координат Oxyz, которые являются сигналами рассогласования между направлением оптической оси зеркала антенного устройства и направлением на неподвижный ОВ в двух взаимно перпендикулярных плоскостях в базовой антенной системе координат Oxyz, осуществляют инерциальное автосопровождение по направлению неподвижного ОВ, назначенного при предстартовой подготовке подвижного носителя. Для этого преобразуют путем интегрирования в замкнутом контуре инерциального автосопровождения по направлению неподвижного ОВ полученные сигналы, пропорциональные текущим значениям составляющих е1, е2 пространственной угловой координаты
неподвижного ОВ в базовой антенной системе координат Oxyz, которые являются сигналами рассогласования между направлением оптической оси зеркала антенного устройства и направлением на неподвижный ОВ в двух взаимно перпендикулярных плоскостях в базовой антенной системе координат Oxyz, осуществляют инерциальное автосопровождение по направлению неподвижного ОВ, назначенного при предстартовой подготовке подвижного носителя. Для этого преобразуют путем интегрирования в замкнутом контуре инерциального автосопровождения по направлению неподвижного ОВ полученные сигналы, пропорциональные текущим значениям составляющих е1, е2 пространственной угловой координаты  неподвижного ОВ, в управляющие длиннопериодические сигналы, пропорциональные соответственно скорости
неподвижного ОВ, в управляющие длиннопериодические сигналы, пропорциональные соответственно скорости  и
и  изменения углов визирования неподвижного ОВ, определяющих текущее направление зеркала антенного устройства на неподвижный ОВ в горизонтальной и в вертикальной плоскости, обусловленных перемещением основания антенного устройства вместе с вращающимся по крену подвижным носителем по направлению к неподвижному ОВ.
изменения углов визирования неподвижного ОВ, определяющих текущее направление зеркала антенного устройства на неподвижный ОВ в горизонтальной и в вертикальной плоскости, обусловленных перемещением основания антенного устройства вместе с вращающимся по крену подвижным носителем по направлению к неподвижному ОВ.
Этими длиннопериодическими сигналами воздействуют на соответствующие датчики момента управляемого трехстепенного гироскопа, установленного во внутренней рамке двухосного карданова подвеса антенного устройства, наружная и внутренняя рамки которого шарнирно связаны с его зеркалом (фиг.6, 7). Под действием этих длиннопериодических сигналов создают длиннопериодические возмущающие управляющие моменты, вызывающие моменты гироскопической реакции в опорах осей прецессии соответствующих рамок трехосного карданова подвеса ротора гироскопа. При этом согласно прецессионной теории гироскопа возникает длиннопериодическое прецессионное отклонение соответствующих рамок трехосного карданова подвеса ротора гироскопа с угловой скоростью, близкой по величине к угловой скорости  и
и  изменения соответствующих углов визирования неподвижного ОВ. Одновременно определяют сигналы, пропорциональные рассогласованию между направлением кинетического момента ротора гироскопа и направлением на неподвижный ОВ, задаваемым сформированными длиннопериодическими сигналами, пропорциональными скорости
изменения соответствующих углов визирования неподвижного ОВ. Одновременно определяют сигналы, пропорциональные рассогласованию между направлением кинетического момента ротора гироскопа и направлением на неподвижный ОВ, задаваемым сформированными длиннопериодическими сигналами, пропорциональными скорости  и
и  изменения углов визирования неподвижного ОВ в горизонтальной и в вертикальной плоскости и соответственно длиннопериодическим возмущающим управляющим моментам.
изменения углов визирования неподвижного ОВ в горизонтальной и в вертикальной плоскости и соответственно длиннопериодическим возмущающим управляющим моментам.
Эти сигналы преобразуют в длиннопериодические сигналы управления электродвигателями вращения рамок двухосного карданова подвеса антенного устройства. По сигналам управления электродвигатели развивают длиннопериодические вращающие моменты, равные и совпадающие по направлению с направлением соответствующих длиннопериодических возмущающих управляющих моментов, для поворота наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала в текущее направление на неподвижные ОВ. При этом одновременно определяют сигналы, пропорциональные соответственно углу наклона  и
и  азимуту неподвижного ОВ относительно основания антенного устройства.
азимуту неподвижного ОВ относительно основания антенного устройства.
Одновременно также формируют сигналы, пропорциональные амплитуде и частоте короткопериодических колебаний, сдвинутых по фазе на 90 градусов, наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала относительно своих осей вращения, и короткопериодические сигналы, пропорциональные колебаниям основания антенного устройства вместе с колебаниями подвижного носителя по рысканию ψ и по тангажу ϑ, которые воздействуют на основание антенного устройства при одновременном его вращении по крену γ вместе с подвижным носителем. Вследствие этого возникают аддитивные короткопериодические возмущающие моменты, которые, в свою очередь, вызывают короткопериодические моменты гироскопической реакции в опорах осей прецессии соответствующих рамок карданова подвеса ротора гироскопа. При этом происходит короткопериодическое прецессионное колебание соответствующих рамок карданова подвеса ротора гироскопа с угловыми скоростями, направление вектора которых совпадает с направлением векторов аддитивных короткопериодических возмущающих моментов. Одновременно определяют сигналы, пропорциональные рассогласованию между направлением кинетического момента ротора гироскопа и направлением вектора аддитивных короткопериодических возмущающих моментов. Эти сигналы преобразуют в аддитивные короткопериодические сигналы управления соответствующих электродвигателей вращения рамок двухосного карданова подвеса антенного устройства. По сигналам управления электродвигатели развивают аддитивные короткопериодические вращающие моменты, равные и противоположно направленные соответственно направлению аддитивных короткопериодических возмущающих моментов, действующих вокруг соответствующих осей вращения наружной и внутренней рамок двухосного карданова подвеса антенного устройства, для отработки аддитивных короткопериодических сигналов, обусловленных вращением основания антенного устройства вместе с вращающимся по крену подвижным носителем и колебаниями их по рысканию ψ и по тангажу ϑ, в текущем направлении на неподвижный ОВ. При этом по сформированным длиннопериодическим управляющим сигналам, пропорциональным скорости  и
и  изменения углов визирования неподвижного ОВ, определяющих текущее стабилизированное от аддитивных короткопериодических колебаний направление зеркала антенного устройства на неподвижный ОВ в горизонтальной и в вертикальной плоскости, осуществляют инерциальное управление стабилизированным направлением зеркала антенного устройства на неподвижный ОВ при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем.
изменения углов визирования неподвижного ОВ, определяющих текущее стабилизированное от аддитивных короткопериодических колебаний направление зеркала антенного устройства на неподвижный ОВ в горизонтальной и в вертикальной плоскости, осуществляют инерциальное управление стабилизированным направлением зеркала антенного устройства на неподвижный ОВ при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем.
Одновременно по полученным сигналам, пропорциональным текущим значениям модуля  скорости изменения наклонной дальности L сближения с неподвижным ОВ основания антенного устройства вместе с вращающимся по крену подвижным носителем и скорости
скорости изменения наклонной дальности L сближения с неподвижным ОВ основания антенного устройства вместе с вращающимся по крену подвижным носителем и скорости  и
и  изменения углов визирования неподвижного ОВ соответственно в горизонтальной и в вертикальной плоскости, формируют управляющие сигналы автономного самонаведения вращающегося по крену подвижного носителя вместе с основанием антенного устройства на неподвижный ОВ, пропорциональные, например, задаваемым перегрузкам соответственно в горизонтальной и в вертикальной плоскости.
изменения углов визирования неподвижного ОВ соответственно в горизонтальной и в вертикальной плоскости, формируют управляющие сигналы автономного самонаведения вращающегося по крену подвижного носителя вместе с основанием антенного устройства на неподвижный ОВ, пропорциональные, например, задаваемым перегрузкам соответственно в горизонтальной и в вертикальной плоскости.
Полученные управляющие сигналы автономного самонаведения преобразуют в электрические сигналы, усиливают затем их по мощности и подают во внешнюю аппаратуру управления электроприводами рулей подвижного носителя.
Сущность изобретения заключается также и в том, что система, осуществляющая способ, содержит антенное устройство, узел инерциального измерения параметров вектора визирования неподвижного ОВ, узел преобразования сигналов начального назначения угла наклона и азимута неподвижного ОВ, узел инерциального автосопровождения неподвижного ОВ по углу наклона, узел инерциального автосопровождения неподвижного ОВ по азимуту, узел инерциального автосопровождения неподвижного ОВ по дальности, узел гиростабилизации и управления направлением зеркала антенного устройства на неподвижный ОВ по углу наклона, узел гиростабилизации и управления направлением зеркала антенного устройства на неподвижный ОВ по азимуту, узел формирования сигналов учета переменной электрической редукции, узел преобразования выходных сигналов гироскопического датчика угловой скорости и входного сигнала датчика момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа, узел преобразования выходных сигналов акселерометров, узел преобразования сигналов составляющих пространственной угловой координаты неподвижного ОВ, узел преобразования входных сигналов датчиков момента управления направлением поворота наружной и внутренней рамок трехосного карданова подвеса ротора гироскопа, узел преобразования сигналов датчиков угла поворота рамок двухосного карданова подвеса антенного устройства, узел формирования сигналов стабилизации и самонаведения подвижного носителя на неподвижный ОВ.
При этом антенное устройство включает в свой состав зеркало с облучателем, двухосный карданов подвес, ось вращения наружной рамки которого установлена на основании антенного устройства, а ось вращения внутренней рамки установлена в наружной рамке перпендикулярно к оси вращения внутренней рамки, электродвигатель поворота наружной рамки двухосного карданова подвеса и электродвигатель поворота внутренней рамки двухосного карданова подвеса, датчик угла поворота наружной рамки карданова подвеса и датчик угла поворота внутренней рамки карданова подвеса соответственно по углу наклона и по азимуту, а также управляемый трехстепенной гироскоп, двухканальный гироскопический датчик угловой скорости (ДУС), три однокомпонентных измерителя линейного ускорения, например, три однокомпонентных акселерометра.
Управляемый трехстепенной гироскоп установлен во внутренней рамке двухосного карданова подвеса антенного устройства так, что направление кинетического момента его ротора в заарретированном положении гироскопа совпадает с нулевым направлением линии визирования антенного устройства.
Гироскоп содержит трехосный карданов подвес ротора гироскопа, датчик угла прецессии внутренней рамки и датчик угла прецессии наружной рамки трехосного карданова подвеса ротора гироскопа, датчик момента управления направлением поворота внутренней рамки трехосного карданова подвеса ротора гироскопа, датчик момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа. При этом ось собственного вращения ротора гироскопа установлена во внутренней рамке трехосного карданова подвеса ротора гироскопа, ось вращения которой установлена в наружной рамке трехосного карданова подвеса ротора гироскопа, ось вращения которой, в свою очередь, установлена в корпусе гироскопа. Причем корпус гироскопа жестко закреплен во внутренней рамке двухосного карданова подвеса антенного устройства. На соответствующих осях вращения рамок карданова подвеса ротора гироскопа установлены соответственно датчики угла прецессии внутренней и наружной рамки трехосного карданова подвеса ротора гироскопа, выходы которых соответственно соединены с входами узлов гиростабилизации и управления направлением зеркала антенного устройства на неподвижный ОВ по углу наклона и по азимуту, выходы которых, в свою очередь, соединены соответственно с электродвигателями поворота наружной и внутренней рамок двухосного карданова подвеса антенного устройства.
Двухканальный гироскопический ДУС установлен во внутренней рамке двухосного карданова подвеса антенного устройства так, что в заарретированном положении одна из его осей чувствительности совпадает с нулевым направлением линии визирования антенного устройства, а другая его ось чувствительности ориентирована, например, вверх вдоль положительного направления оси вращения внутренней рамки двухосного карданова подвеса антенного устройства. При этом направление кинетического момента ротора гироскопа ДУС совпадает с положительным направлением оси вращения наружной рамки двухосного карданова подвеса антенного устройства. Причем выход датчиков угла прецессии внутренней и наружной рамок трехосного карданова подвеса ротора гироскопического ДУС соединены соответственно с входом усилителей сигналов обратной связи, выходы которых соединены соответственно с датчиками момента внутренней и наружной рамок ДУС, благодаря чему реализуется электрическая пружина, обеспечивающая возможность снимать с датчиков угла прецессии сигналы, пропорциональные составляющим вектора угловой скорости вращения ДУС. Все три однокомпонентных измерителя линейного ускорения установлены во внутренней рамке двухосного карданова подвеса антенного устройства так, что ось чувствительности одного их них взаимно ортогональна по отношению к взаимно ортогональным осям чувствительности двух других однокомпонентных измерителей линейного ускорения. Ось чувствительности одного из трех однокомпонентных измерителей линейного ускорения совпадает в заарретированном положении с нулевым положением линии визирования антенного устройства.
При этом гироскоп, гироскопический ДУС и три акселерометра образуют блок гироинерциальных датчиков, интегрированных в антенное устройство, и являются датчиками первичной информации для узла инерциального измерения параметров вектора визирования неподвижного ОВ.
Зеркало антенного устройства выполнено с возможностью поворота в двух взаимно перпендикулярных плоскостях с помощью двухстепенного шарнира относительно центра излучения облучателя, жестко закрепленного на основании антенного устройства. Зеркало шарнирно соединено жесткими тягами соответственно с наружной и с внутренней рамкой двухосного карданова подвеса антенного устройства так, что расстояние между каждым из шарниров жестких тяг на задней поверхности зеркала и его центром вращения равно расстоянию между каждым из шарниров, установленных соответственно на наружной рамке и на внутренней рамке двухосного карданова подвеса антенного устройства, и центром вращения этих рамок.
В системе, осуществляющей способ, выходы трех однокомпонентных измерителей линейного ускорения соединены соответственно с первым, вторым и третьим входами узла преобразования сигналов 

 акселерометров. Выходы первый, второй и третий этого узла соединены соответственно с первым, вторым и третьим входами узла инерциального измерения параметров вектора визирования (ИИПВВ) неподвижного ОВ.
акселерометров. Выходы первый, второй и третий этого узла соединены соответственно с первым, вторым и третьим входами узла инерциального измерения параметров вектора визирования (ИИПВВ) неподвижного ОВ.
Выходы двухканального гироскопического ДУС и вход датчика момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа соединены соответственно с первым, вторым и третьим входами узла преобразования сигналов, пропорциональных проекциям 

 вектора
вектора  абсолютной угловой скорости вращения зеркала антенного устройства на соответствующие оси системы координат Oxзyзzз, связанной с зеркалом антенного устройства. Причем сигнал, пропорциональный проекции
абсолютной угловой скорости вращения зеркала антенного устройства на соответствующие оси системы координат Oxзyзzз, связанной с зеркалом антенного устройства. Причем сигнал, пропорциональный проекции  также пропорционален сигналу
также пропорционален сигналу  подаваемому на датчик момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора поворота наружной рамки трехосного карданова подвеса ротора гироскопа. Кроме того, информационная линия связи, по которой поступает информационный массив сигналов предстартового начального назначения неподвижного ОВ и начальной выставки инерциального измерения параметров вектора визирования неподвижного ОВ, соединена с информационным седьмым входом узла инерциального измерения параметров вектора визирования неподвижного ОВ.
подаваемому на датчик момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора поворота наружной рамки трехосного карданова подвеса ротора гироскопа. Кроме того, информационная линия связи, по которой поступает информационный массив сигналов предстартового начального назначения неподвижного ОВ и начальной выставки инерциального измерения параметров вектора визирования неподвижного ОВ, соединена с информационным седьмым входом узла инерциального измерения параметров вектора визирования неподвижного ОВ.
Выходы датчика угла поворота наружной рамки и датчика угла поворота внутренней рамки двухосного карданова подвеса антенного устройства соответственно по углу наклона и по азимуту соединены соответственно с первым входом узла инерциального автосопровождения неподвижного ОВ по углу наклона и со вторым входом узла инерциального автосопровождения неподвижного ОВ по азимуту, а также соединены соответственно с первым и вторым входом узла преобразования сигналов координат  и
и  и с первым и со вторым входом узла формирования сигналов ΔεН и ΔεА учета переменной электрической редукции между углами поворота направления зеркала антенного устройства и направления линии визирования неподвижного ОВ. Причем первый выход узла инерциального автосопровождения неподвижного ОВ по углу наклона и первый выход узла инерциального автосопровождения неподвижного ОВ по азимуту соединены соответственно с датчиками момента управления направлением поворота наружной и внутренней рамками трехосного карданова подвеса ротора гироскопа, а также с первым и вторым входами узла преобразования входных сигналов датчиков момента управления направлением поворота наружной и внутренней рамками трехосного карданова подвеса ротора гироскопа. При этом первый и второй выходы узла преобразования сигналов датчиков угла поворота рамок по углу наклона и по азимуту двухосного карданова подвеса антенного устройства соединены соответственно с третьим и четвертым входами узла формирования сигналов ΔεН и
и с первым и со вторым входом узла формирования сигналов ΔεН и ΔεА учета переменной электрической редукции между углами поворота направления зеркала антенного устройства и направления линии визирования неподвижного ОВ. Причем первый выход узла инерциального автосопровождения неподвижного ОВ по углу наклона и первый выход узла инерциального автосопровождения неподвижного ОВ по азимуту соединены соответственно с датчиками момента управления направлением поворота наружной и внутренней рамками трехосного карданова подвеса ротора гироскопа, а также с первым и вторым входами узла преобразования входных сигналов датчиков момента управления направлением поворота наружной и внутренней рамками трехосного карданова подвеса ротора гироскопа. При этом первый и второй выходы узла преобразования сигналов датчиков угла поворота рамок по углу наклона и по азимуту двухосного карданова подвеса антенного устройства соединены соответственно с третьим и четвертым входами узла формирования сигналов ΔεН и
ΔεА учета переменной электрической редукции, а также соединены соответственно с пятым и шестым входами узла формирования сигналов стабилизации и автономного самонаведения подвижного носителя на неподвижный ОВ. Первый и второй выходы узла формирования сигналов ΔεН и ΔεА учета переменной электрической редукции соединены соответственно с четвертым и пятым входами узла преобразования выходных сигналов акселерометров, с четвертым и пятым входами узла преобразования выходных сигналов гироскопического ДУС и входом датчика момента управления направлением поворота наружной рамки карданова подвеса ротора гироскопа.
Первый и второй выходы узла инерциального измерения параметров вектора визирования неподвижного ОВ соответственно соединены с первым и вторым входами узла преобразования сигналов составляющих е1и, е2и пространственной угловой координаты  неподвижного ОВ, а первый и второй входы узла преобразования сигналов составляющих е1и, е2и пространственной угловой координаты
неподвижного ОВ, а первый и второй входы узла преобразования сигналов составляющих е1и, е2и пространственной угловой координаты  соединены соответственно со вторым и первым выходами узла инерциального измерения параметров вектора визирования неподвижного ОВ, причем первый и второй выходы узла преобразования составляющих пространственной угловой координаты соединены соответственно со вторым входом узла инерциального автосопровождения неподвижного ОВ по углу наклона и с первым входом узла а инерциального автосопровождения неподвижного ОВ по азимуту. При этом третий и четвертый выходы узла инерциального измерения параметров вектора визирования неподвижного ОВ соединены соответственно с первым и вторым входами узла инерциального автосопровождения неподвижного ОВ по дальности. Причем первый и второй выходы узла инерциального автосопровождения неподвижного ОВ по дальности соединены соответственно с третьим и четвертым входами узла формирования сигналов стабилизации и автономного самонаведения подвижного носителя на неподвижный ОВ, а пятый и шестой выходы узла инерциального измерения параметров вектора визирования неподвижного ОВ соединены с первым и вторым входами узла преобразования сигналов начального назначения угла наклона и азимута неподвижного ОВ, первый и второй выходы которого соединены соответственно с третьим входом узла инерциального автосопровождения неподвижного ОВ по углу наклона и с третьим входом узла инерциального автосопровождения неподвижного ОВ по азимуту. Информационная линия связи, по которой поступает информационный массив сигналов стабилизации и автономного самонаведения подвижного носителя, соединена с входом аппаратуры управления рулями вращающегося по крену подвижного носителя антенного устройства, которая является внешней по отношению к предложенной системе, осуществляющей заявленный способ.
соединены соответственно со вторым и первым выходами узла инерциального измерения параметров вектора визирования неподвижного ОВ, причем первый и второй выходы узла преобразования составляющих пространственной угловой координаты соединены соответственно со вторым входом узла инерциального автосопровождения неподвижного ОВ по углу наклона и с первым входом узла а инерциального автосопровождения неподвижного ОВ по азимуту. При этом третий и четвертый выходы узла инерциального измерения параметров вектора визирования неподвижного ОВ соединены соответственно с первым и вторым входами узла инерциального автосопровождения неподвижного ОВ по дальности. Причем первый и второй выходы узла инерциального автосопровождения неподвижного ОВ по дальности соединены соответственно с третьим и четвертым входами узла формирования сигналов стабилизации и автономного самонаведения подвижного носителя на неподвижный ОВ, а пятый и шестой выходы узла инерциального измерения параметров вектора визирования неподвижного ОВ соединены с первым и вторым входами узла преобразования сигналов начального назначения угла наклона и азимута неподвижного ОВ, первый и второй выходы которого соединены соответственно с третьим входом узла инерциального автосопровождения неподвижного ОВ по углу наклона и с третьим входом узла инерциального автосопровождения неподвижного ОВ по азимуту. Информационная линия связи, по которой поступает информационный массив сигналов стабилизации и автономного самонаведения подвижного носителя, соединена с входом аппаратуры управления рулями вращающегося по крену подвижного носителя антенного устройства, которая является внешней по отношению к предложенной системе, осуществляющей заявленный способ.
Введение указанных признаков в способ и в систему для его осуществления при круговом вращении основания антенного устройства относительно своей оси симметрии, ортогональной к плоскости основания, жестко связанного с корпусом вращающегося по крену подвижного носителя антенного устройства, обеспечивает формирование сигналов инерциального управления направлением зеркала антенного устройства на неподвижный ОВ с одновременным формированием:
- сигналов  и
и  автономного самонаведения подвижного носителя на неподвижный ОВ;
автономного самонаведения подвижного носителя на неподвижный ОВ;
- длиннопериодических управляющих сигналов, пропорциональных скорости изменения углов визирования, определяющих текущее направление зеркала антенного устройства на неподвижный ОВ в горизонтальной и в вертикальной плоскости;
- сигналов, пропорциональных текущим значениям параметров вектора визирования неподвижного ОВ, а именно:
- проекциям вектора линейной скорости сближения с неподвижным ОВ основания антенного устройства вместе с вращающимся по крену подвижным носителем на соответствующие оси базовой антенной системы координат,
- наклонной дальности и наклонной скорости сближения с неподвижным ОВ основания антенного устройства вместе с вращающимся по крену подвижным носителем,
- составляющим пространственной угловой координаты неподвижного ОВ в базовой антенной системы координат,
- направляющим косинусам взаимного текущего положения базовой антенной системы координат и опорной геоцентрической системы координат. В результате осуществляют инерциальное управление стабилизированным от аддитивных короткопериодических колебаний направлением зеркала антенного устройства на неподвижный ОВ.
Из уровня техники не выявлены решения, имеющие признаки, совпадающие с отличительными признаками предлагаемых технических решений задачи формирования сигналов инерциального управления направлением зеркала антенного устройства на неподвижный ОВ при круговом вращении основания антенного устройства, установленного жестко внутри корпуса подвижного носителя, вращающегося по крену вокруг продольной оси симметрии. Поэтому предложенные технические решения этой задачи соответствуют условию изобретательского уровня.
Сущность изобретения поясняется чертежами, где представлены:
- на фиг.1 - принятые системы координат;
- на фиг.2 - положение вектора  визирования ОВ в базовой антенной системе координат Oxyz;
визирования ОВ в базовой антенной системе координат Oxyz;
- на фиг.3 - взаимное положение базовой антенной системы координат Oxyz и местной горизонтальной системы координат Oξηζ;
- на фиг.4 - взаимное положение базовой антенной системы координат Oxyz и связанной системы координат Ox1y1z1;
- на фиг.5 - взаимное положение связанной с подвижным носителем антенного устройства системы координат Ox1y1z1 и местной горизонтальной системы координат Oξηζ;
- на фиг.6 - структурная схема предлагаемой системы;
- на фиг.7 - кинематическая схема интегрированного антенного устройства системы, осуществляющей заявленный способ;
- на фиг.8 - геометрия движения радиолокационного луча при повороте зеркала по углу наклона и по азимуту, шарнирно связанного с двухосным кардановым подвесом антенного устройства;
- на фиг.9 - сигналы, пропорциональные измеряемым проекциям nx, ny, nz, вектора  кажущегося линейного ускорения перемещения основания антенного устройства вместе с вращающимся по крену подвижным носителем на оси базовой антенной системы координат Oxyz;
кажущегося линейного ускорения перемещения основания антенного устройства вместе с вращающимся по крену подвижным носителем на оси базовой антенной системы координат Oxyz;
- на фиг.10 - сигналы, пропорциональные измеряемым проекциям ωх, ωу, ωz, вектора  абсолютной угловой скорости пространственного вращения основания антенного устройства вместе с вращающимся по крену подвижным носителем на оси базовой антенной системы координат Oxyz;
абсолютной угловой скорости пространственного вращения основания антенного устройства вместе с вращающимся по крену подвижным носителем на оси базовой антенной системы координат Oxyz;
- на фиг.11 - сигналы рассогласования по направлению e1 е2 и по дальности ΔL в антенной системе координат Oxyz, пропорциональные полученным в результате инерциального измерения текущих значений параметров вектора визирования неподвижного ОВ, в разомкнутых контурах инерциального его автосопровождения по направлению и по дальности при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем;
- на фиг.12 - сигналы рассогласования по направлению e1, е2 и по дальности ΔL в антенной системе координат Oxyz, пропорциональные полученным в результате инерциального измерения текущих значений параметров вектора визирования неподвижного ОВ, в замкнутых контурах инерциального его автосопровождения по направлению и по дальности при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем;
- на фиг.13 - аддитивные короткопериодические сигналы, определяемые и регистрируемые датчиками угла поворота наружной рамки по наклону εH и внутренней рамки по азимуту εA двухосного карданова подвеса при круговом вращении основания антенного устройства при стартовом перемещении подвижного носителя с увеличением угловой скорости его вращения по крену с постоянным угловым ускорением.
Предлагаемый способ характеризуется тем, что для выполнения инерциального управления направлением зеркала на неподвижный ОВ после старта при перемещении вращающегося по крену подвижного носителя антенного устройства по траектории во время его предстартовой подготовки до старта определяют и задают сигналы в виде пакета последовательных информационных слов (информационный массив), содержащего начальные значения:
- угла наклона  и азимута
и азимута  неподвижного ОВ относительно основания антенного устройства в связанной системе координат Ox1y1z1 (фиг.4);
неподвижного ОВ относительно основания антенного устройства в связанной системе координат Ox1y1z1 (фиг.4);
- наклонной дальности L0 до неподвижного ОВ и наклонной скорости  сближения с неподвижным ОВ основания антенного устройства вместе с подвижным носителем в предстартовом его положении,
сближения с неподвижным ОВ основания антенного устройства вместе с подвижным носителем в предстартовом его положении,
- рыскания ψ0, тангажа  и крена γ0 подвижного носителя вместе с основанием антенного устройства (фиг.5),
и крена γ0 подвижного носителя вместе с основанием антенного устройства (фиг.5),
а также начальные условия выставки инерциального измерения параметров вектора визирования неподвижного ОВ, т.е.:
- проекции 

 вектора
вектора  линейной скорости предстартового перемещения основания антенного устройства вместе с подвижным носителем, находящимся в предстартовом положении, на соответствующие оси местной горизонтальной системы координат Oξηζ (фиг.1, 3),
линейной скорости предстартового перемещения основания антенного устройства вместе с подвижным носителем, находящимся в предстартовом положении, на соответствующие оси местной горизонтальной системы координат Oξηζ (фиг.1, 3),
- декартовых координат ξ0, η0, ζ0 подвижного носителя в местной горизонтальной системе координат Oξηζ,
- долготы λ0 и географической широты φ0 подвижного носителя (фиг.1),
- кроме того, информацию о необходимых режимных дальностных сигналах, контрольное слово и командное слово. Сформированный пакет проверяют на отсутствие в нем искажений.
На борту подвижного носителя преобразуют сигналы, характеризующие в пакете заданные начальные условия выставки инерциального измерения параметров вектора визирования неподвижного ОВ, в сигналы, пропорциональные проекциям 

 вектора
вектора  линейной скорости предстартового перемещения подвижного носителя вместе с основанием антенного устройства на соответствующие оси базовой антенной системы координат Oxyz (фиг.2), в сигналы, пропорциональные углам
линейной скорости предстартового перемещения подвижного носителя вместе с основанием антенного устройства на соответствующие оси базовой антенной системы координат Oxyz (фиг.2), в сигналы, пропорциональные углам  и
и  визирования неподвижного ОВ соответственно в горизонтальной и в вертикальной плоскости в местной горизонтальной системе координат Oξηζ, (фиг.3), в сигналы, пропорциональные составляющим
визирования неподвижного ОВ соответственно в горизонтальной и в вертикальной плоскости в местной горизонтальной системе координат Oξηζ, (фиг.3), в сигналы, пропорциональные составляющим  и
и  пространственной угловой координаты
пространственной угловой координаты  неподвижного ОВ в базовой антенной системе координат Oxyz (фиг.2), в сигналы, пропорциональные направляющим косинусам
неподвижного ОВ в базовой антенной системе координат Oxyz (фиг.2), в сигналы, пропорциональные направляющим косинусам  где i, j=1, 2, 3, определяющим начальное взаимное положение базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Cξ0η0ζ0, связанной одной своей координатной осью Сξ0 с неподвижным ОВ, расположенным, например, на земной поверхности (фиг.1).
где i, j=1, 2, 3, определяющим начальное взаимное положение базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Cξ0η0ζ0, связанной одной своей координатной осью Сξ0 с неподвижным ОВ, расположенным, например, на земной поверхности (фиг.1).
Данные преобразования выполняют согласно следующему алгоритму:

где ξ0=ξmax - начальное значение горизонтальной декартовой координаты назначенного неподвижного ОВ, т.е. горизонтальная дальность D0 пуска подвижного носителя;
где ζ0 - начальное значение боковой декартовой координаты назначенного неподвижного ОВ в горизонтальной плоскости;

где r0 - начальное значение модуля радиус-вектора  центра масс подвижного носителя, определяющего его положение относительно центра Земли (фиг.1);
центра масс подвижного носителя, определяющего его положение относительно центра Земли (фиг.1);
Н0=η0 - высота пуска подвижного носителя;
R0=RЗ - радиус земного сфероида в месте нахождения назначенного неподвижного ОВ;

где L0 - начальное значение наклонной дальности до неподвижного ОВ, задаваемое предстартовым начальным назначением;
Р0 - начальное значение полупериметра векторного треугольника, образуемого векторами 






где j, k=1, 2, 3;


В момент времени математической отцепки, а при ее отсутствии в момент времени физического старта подвижного носителя антенного устройства обновление начальной информации прекращается. С момента времени начала перемещения подвижного носителя он начинает вместе с основанием антенного устройства вращаться по крену с наперед заданным начальным постоянным угловым ускорением. При этом одновременно измеряют сигналы, пропорциональные проекциям 

 вектора
вектора  кажущегося линейного ускорения движения и проекциям
кажущегося линейного ускорения движения и проекциям 

 вектора
вектора  абсолютной угловой скорости поворота зеркала антенного устройства на соответствующие оси системы координат OxЗyЗzЗ, связанной с зеркалом антенного устройства, где ОхЗ - оптическая ось зеркала. По этим измеренным сигналам, принимая во внимание функциональную зависимость (переменную электрическую редукцию) между углами поворота подвижного зеркала
абсолютной угловой скорости поворота зеркала антенного устройства на соответствующие оси системы координат OxЗyЗzЗ, связанной с зеркалом антенного устройства, где ОхЗ - оптическая ось зеркала. По этим измеренным сигналам, принимая во внимание функциональную зависимость (переменную электрическую редукцию) между углами поворота подвижного зеркала  и
и  и углами поворота εH и εA линии визирования (диаграммы направленности (луча) антенного устройства) при вращении зеркала одновременно в двух взаимно перпендикулярных плоскостях по углу наклона
и углами поворота εH и εA линии визирования (диаграммы направленности (луча) антенного устройства) при вращении зеркала одновременно в двух взаимно перпендикулярных плоскостях по углу наклона  и по азимуту
и по азимуту  относительно неподвижного облучателя, жестко установленного на основании антенного устройства, определяют сигналы, пропорциональные проекциям nx,ny,nz вектора
относительно неподвижного облучателя, жестко установленного на основании антенного устройства, определяют сигналы, пропорциональные проекциям nx,ny,nz вектора  кажущегося линейного ускорения движения и проекциям ωх, ωy, ωz вектора
кажущегося линейного ускорения движения и проекциям ωх, ωy, ωz вектора  абсолютной угловой скорости поворота вектора визирования неподвижного ОВ на соответствующие оси базовой антенной системы координат Oxyz, согласно следующему алгоритму (фиг.8):
абсолютной угловой скорости поворота вектора визирования неподвижного ОВ на соответствующие оси базовой антенной системы координат Oxyz, согласно следующему алгоритму (фиг.8):
где  и
и  - углы поворота зеркала антенного устройства по углу наклона и по азимута соответственно относительно основания антенного устройства; εH и εA - углы поворота линии визирования ОВ по углу наклона и по азимуту соответственно относительно основания антенного устройства в связанной системе координат Ox1y1z1 (фиг.4);
- углы поворота зеркала антенного устройства по углу наклона и по азимута соответственно относительно основания антенного устройства; εH и εA - углы поворота линии визирования ОВ по углу наклона и по азимуту соответственно относительно основания антенного устройства в связанной системе координат Ox1y1z1 (фиг.4);

где
т.е.:


Учитывая заданные сигналы предстартового начального назначения неподвижного ОВ и начальной выставки инерциального измерения параметров вектора визирования неподвижного ОВ, формируют сигналы, пропорциональные текущим значениям параметров вектора  визирования неподвижного ОВ, определяющих взаимное положение неподвижного ОВ и движущегося по траектории подвижного носителя, вращающегося по крену вместе с основанием антенного устройства, а именно:
визирования неподвижного ОВ, определяющих взаимное положение неподвижного ОВ и движущегося по траектории подвижного носителя, вращающегося по крену вместе с основанием антенного устройства, а именно:
- проекций Vx, Vy, Vz вектора  линейной скорости сближения с неподвижным ОВ основания антенного устройства вместе с вращающимся по крену подвижным носителем на соответствующие оси базовой антенной системы координат Oxyz,
линейной скорости сближения с неподвижным ОВ основания антенного устройства вместе с вращающимся по крену подвижным носителем на соответствующие оси базовой антенной системы координат Oxyz,
- наклонной дальности L до неподвижного ОВ и наклонной скорости  сближения с неподвижным ОВ при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем,
сближения с неподвижным ОВ при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем,
- составляющих e1 и е2 пространственной угловой координаты  неподвижного ОВ в базовой антенной системе координат Oxyz (фиг.2),
неподвижного ОВ в базовой антенной системе координат Oxyz (фиг.2),
- направляющих косинусов βij взаимного углового положения базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Cξ0η0ζ0, связанной одной своей осью Cζ0 с неподвижным ОВ, расположенным, например, на земной поверхности (фиг.1),
разрешая следующий алгоритм инерциального измерения параметров вектора визирования (ИИПВВ) неподвижного ОВ:

где i, j=1, 2, 3, причем
- Lmax - дальность пуска подвижного носителя по неподвижному ОВ;
- 

 L0,
L0, 

 - начальные условия выставки инерциального измерения параметров вектора визирования неподвижного ОВ в процессе предстартовой подготовки подвижного носителя к пуску;
- начальные условия выставки инерциального измерения параметров вектора визирования неподвижного ОВ в процессе предстартовой подготовки подвижного носителя к пуску;
- 





 - подынтегральные функции, которые записываются в виде следующей системы дифференциальных уравнений первого порядка в векторной форме:
- подынтегральные функции, которые записываются в виде следующей системы дифференциальных уравнений первого порядка в векторной форме:

где для случая визирования неподвижного ОВ R=const и, принимая Ω=const, по теореме Кориолиса

причем
где ε=ε(ξ1,η1,ζ1) - составляющая силовой функции поля тяготения Земли, характеризующая ее малое отклонение от сферической формы (ξ1,η1,ζ1) - проекции радиус-вектора  на оси экваториальной (геоцентрической) системы координат Cξ1η1ζ (фиг.1)),
на оси экваториальной (геоцентрической) системы координат Cξ1η1ζ (фиг.1)),

По полученным сигналам, пропорциональным текущим значениям наклонной дальности L до неподвижного ОВ и наклонной скорости  сближения при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем, формируют сигнал, пропорциональный текущему значению
сближения при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем, формируют сигнал, пропорциональный текущему значению  где Δt - интервал дискретизации, i - инкремент, рассогласования между L0 и L, и осуществляют инерциальное автосопровождение по дальности неподвижного ОВ, назначенного при предстартовой подготовке подвижного носителя (фиг.11, 12). При этом одновременно по полученным сигналам, пропорциональным текущим значениям составляющих e1 и е2 пространственной угловой координаты
где Δt - интервал дискретизации, i - инкремент, рассогласования между L0 и L, и осуществляют инерциальное автосопровождение по дальности неподвижного ОВ, назначенного при предстартовой подготовке подвижного носителя (фиг.11, 12). При этом одновременно по полученным сигналам, пропорциональным текущим значениям составляющих e1 и е2 пространственной угловой координаты  неподвижного ОВ в базовой антенной системе координат Oxyz (фиг.2), которые являются соответственно сигналами рассогласования (ошибки) между направлением оптической оси зеркала антенного устройства и направлением на неподвижный ОВ в двух взаимно перпендикулярных плоскостях в базовой антенной системе координат Oxyz (фиг.11), осуществляют инерциальное автосопровождение по направлению неподвижного ОВ, назначенного при предстартовой подготовке подвижного носителя (фиг.12). Сигналы, пропорциональные составляющим e1 и е2 пространственной угловой координаты
неподвижного ОВ в базовой антенной системе координат Oxyz (фиг.2), которые являются соответственно сигналами рассогласования (ошибки) между направлением оптической оси зеркала антенного устройства и направлением на неподвижный ОВ в двух взаимно перпендикулярных плоскостях в базовой антенной системе координат Oxyz (фиг.11), осуществляют инерциальное автосопровождение по направлению неподвижного ОВ, назначенного при предстартовой подготовке подвижного носителя (фиг.12). Сигналы, пропорциональные составляющим e1 и е2 пространственной угловой координаты  путем интегрирования в замкнутом контуре инерциального автосопровождения преобразуют в управляющие длиннопериодические сигналы, пропорциональные соответственно скорости
путем интегрирования в замкнутом контуре инерциального автосопровождения преобразуют в управляющие длиннопериодические сигналы, пропорциональные соответственно скорости  и
и  изменения углов визирования, определяющих текущее направление зеркала антенного устройства на неподвижный ОВ в горизонтальной
изменения углов визирования, определяющих текущее направление зеркала антенного устройства на неподвижный ОВ в горизонтальной  и в вертикальной
и в вертикальной  плоскости. Указанные сигналы рассогласования (ошибки) обусловлены перемещением подвижного носителя относительно неподвижного ОВ. Этими длиннопериодическими сигналами, пропорциональными угловым скоростям
плоскости. Указанные сигналы рассогласования (ошибки) обусловлены перемещением подвижного носителя относительно неподвижного ОВ. Этими длиннопериодическими сигналами, пропорциональными угловым скоростям  и
и  воздействуют на соответствующие датчики момента управляемого трехстепенного гироскопа, установленного во внутренней рамке двухосного карданова подвеса антенного устройства, наружная и внутренняя рамки которого шарнирно связаны с его зеркалом.
воздействуют на соответствующие датчики момента управляемого трехстепенного гироскопа, установленного во внутренней рамке двухосного карданова подвеса антенного устройства, наружная и внутренняя рамки которого шарнирно связаны с его зеркалом.
Под действием этих длиннопериодических сигналов создают длиннопериодические возмущающие управляющие моменты, вызывающие согласно прецессионной теории гироскопа момент гироскопической реакции в опорах осей прецессии соответствующих рамок трехосного карданова подвеса гироскопа. При этом согласно прецессионной теории гироскопа возникает длиннопериодическое прецессионное отклонение соответствующих рамок карданова подвеса ротора гироскопа с угловой скоростью, близкой по величине к угловой скорости  и
и  изменения соответствующих углов
изменения соответствующих углов  и
и  визирования неподвижного ОВ, назначенного при предстартовой подготовке подвижного носителя. Одновременно с помощью датчиков угла прецессии определяют сигналы, пропорциональные рассогласованию между направлением кинетического момента
визирования неподвижного ОВ, назначенного при предстартовой подготовке подвижного носителя. Одновременно с помощью датчиков угла прецессии определяют сигналы, пропорциональные рассогласованию между направлением кинетического момента  ротора гироскопа и направлением на неподвижный ОВ, задаваемым сформированными длиннопериодическими сигналами, пропорциональными угловой скорости
ротора гироскопа и направлением на неподвижный ОВ, задаваемым сформированными длиннопериодическими сигналами, пропорциональными угловой скорости  и
и  изменения углов визирования
изменения углов визирования  и
и  неподвижного ОВ в горизонтальной и в вертикальной плоскости, и соответственно длиннопериодическим возмущающим управляющим моментам.
неподвижного ОВ в горизонтальной и в вертикальной плоскости, и соответственно длиннопериодическим возмущающим управляющим моментам.
Эти сигналы преобразуют в длиннопериодические сигналы управления электродвигателями вращения рамок двухосного карданова подвеса антенного устройства. По сигналам управления двигатели развивают длиннопериодические вращающие моменты, равные и совпадающие по направлению с направлением соответствующих моментов, для поворота наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала в текущее направление на неподвижный ОВ. При этом одновременно определяют сигналы, пропорциональные соответственно углу наклона εH и азимуту εA неподвижного ОВ относительно основания антенного устройства.
Одновременно также при круговом вращении основания антенного устройства вместе с вращающимся по крену γ с угловой скоростью  подвижным носителем формируют сигналы, пропорциональные амплитуде и частоте короткопериодических колебаний, сдвинутых на 90°, наружной
подвижным носителем формируют сигналы, пропорциональные амплитуде и частоте короткопериодических колебаний, сдвинутых на 90°, наружной  и внутренней
и внутренней  рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала относительно своих осей вращения, и короткопериодические сигналы, пропорциональные колебаниям подвижного носителя антенного устройства по рысканию ψ и по тангажу ϑ, воздействующим на основание антенного устройства при одновременном его вращении по крену γ с угловой скоростью
рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала относительно своих осей вращения, и короткопериодические сигналы, пропорциональные колебаниям подвижного носителя антенного устройства по рысканию ψ и по тангажу ϑ, воздействующим на основание антенного устройства при одновременном его вращении по крену γ с угловой скоростью  вместе с подвижным носителем. Указанные сигналы
вместе с подвижным носителем. Указанные сигналы  и
и  регистрируют с помощью датчиков угла поворота соответственно наружной и внутренней рамок двухосного карданова подвеса антенного устройства как аддитивные короткопериодические, которые формируются согласно следующему алгоритму:
регистрируют с помощью датчиков угла поворота соответственно наружной и внутренней рамок двухосного карданова подвеса антенного устройства как аддитивные короткопериодические, которые формируются согласно следующему алгоритму:


Причем, например, при исходных условиях:
ψ=ψmax·sin(2π·fψ·t); 
где ψmax=2°,  fψ1,5 Гц,
fψ1,5 Гц, 


согласно алгоритмам (25) и (26) датчики угла поворота наружной и внутренней рамок двухосного карданова подвеса антенного устройства при круговом вращении его основания вместе с вращающимся по крену подвижным носителем определяют и регистрируют аддитивные короткопериодические сигналы, пропорциональные углу наклона εH и азимута εA, а также сигналы, пропорциональные скорости  и
и  изменения углов поворота соответственно наружной и внутренней рамок двухосного карданова подвеса (фиг.13).
изменения углов поворота соответственно наружной и внутренней рамок двухосного карданова подвеса (фиг.13).
Следовательно, амплитуда короткопериодических сигналов, пропорциональных аддитивным короткопериодическим колебаниям наружной рамки по углу наклона  и внутренней рамки по азимуту
и внутренней рамки по азимуту  двухосного карданова подвеса антенного устройства и соответствующим им колебаниям угловой скорости их изменения модулируется более низкой частотой fψ и fϑ колебаний подвижного носителя вместе с основанием антенного устройства по рысканию и по тангажу по сравнению с частотой fγ колебания рамок двухосного карданова подвеса антенного устройства, обусловленного круговым вращением его основания вместе с вращающимся по крену γ с угловой скоростью
двухосного карданова подвеса антенного устройства и соответствующим им колебаниям угловой скорости их изменения модулируется более низкой частотой fψ и fϑ колебаний подвижного носителя вместе с основанием антенного устройства по рысканию и по тангажу по сравнению с частотой fγ колебания рамок двухосного карданова подвеса антенного устройства, обусловленного круговым вращением его основания вместе с вращающимся по крену γ с угловой скоростью  подвижным носителем (фиг.13).
подвижным носителем (фиг.13).
Аддитивные короткопериодические колебания рамок двухосного карданова подвеса антенного устройства вызывают аддитивные короткопериодические возмущающие моменты, которые, в свою очередь, вызывают согласно прецессионной теории гироскопа момент гироскопической реакции, т.е. гироскопический момент, в опорах осей прецессии соответствующих рамок карданова подвеса ротора гироскопа. При этом возникает аддитивное короткопериодическое прецессионное колебание соответствующих рамок карданова подвеса ротора гироскопа с угловыми скоростями, направление вектора которых совпадает с направлением аддитивных короткопериодических возмущающих моментов. Одновременно определяют сигналы, пропорциональные рассогласованию между направлением кинетического момента  ротора гироскопа и направлением вектора аддитивных короткопериодических возмущающих моментов.
ротора гироскопа и направлением вектора аддитивных короткопериодических возмущающих моментов.
Эти сигналы преобразуют в аддитивные короткопериодические сигналы управления соответствующих электродвигателей вращения рамок двухосного карданова подвеса антенного устройства, которые подают на управляющую обмотку соответствующего электродвигателя. Электродвигатели по сигналам управления развивают стабилизирующие аддитивные короткопериодические вращающие моменты, равные и противоположно направленные соответственно направлению аддитивных короткопериодических возмущающих моментов, действующих вокруг соответствующих осей вращения наружной и внутренней рамок карданова подвеса антенного устройства, для отработки аддитивных короткопериодических сигналов, обусловленных вращением основания антенного устройства вместе с вращающимся по крену γ подвижным носителем и колебаниями их по рысканию и по тангажу, в текущем стабилизированном направлении на неподвижный ОВ.
При этом по сформированным длиннопериодическим управляющим сигналам, пропорциональным скорости  и
и  изменения углов визирования в горизонтальной плоскости
изменения углов визирования в горизонтальной плоскости  и в вертикальной плоскости
и в вертикальной плоскости  определяют текущее стабилизированное от аддитивных короткопериодических колебаний направление зеркала антенного устройства на неподвижный ОВ в горизонтальной и в вертикальной плоскости.
определяют текущее стабилизированное от аддитивных короткопериодических колебаний направление зеркала антенного устройства на неподвижный ОВ в горизонтальной и в вертикальной плоскости.
В результате осуществляют инерциальное управление стабилизированным от аддитивных короткопериодических колебаний (возмущающих моментов) направлением зеркала антенного устройства на неподвижный ОВ при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем.
Одновременно формируют сигналы автономного самонаведения вращающегося по крену подвижного носителя на неподвижный ОВ, пропорциональные, например, задаваемым управляющим перегрузкам в вертикальной и в горизонтальной плоскости, являющимися функциями модуля наклонной скорости  сближения с неподвижным ОВ основания антенного устройства вместе с вращающимся по крену подвижным носителем и скорости
сближения с неподвижным ОВ основания антенного устройства вместе с вращающимся по крену подвижным носителем и скорости  и
и  изменения углов визирования неподвижного ОВ соответственно в горизонтальной и в вертикальной плоскости, реализуемые по следующему алгоритму:
изменения углов визирования неподвижного ОВ соответственно в горизонтальной и в вертикальной плоскости, реализуемые по следующему алгоритму:

где  - значение перегрузки, компенсирующей влияние гравитационной составляющей; b1 и b2 - постоянные числовые коэффициенты, определяемые для каждой траектории перемещения подвижного носителя; КГ и КВ - коэффициенты пропорциональности; Тф - постоянная времени фильтра.
- значение перегрузки, компенсирующей влияние гравитационной составляющей; b1 и b2 - постоянные числовые коэффициенты, определяемые для каждой траектории перемещения подвижного носителя; КГ и КВ - коэффициенты пропорциональности; Тф - постоянная времени фильтра.
Полученные управляющие сигналы преобразуют в электрические сигналы, усиливают по мощности и подают на соответствующие входы аппаратуры управления рулями управления подвижного носителя антенного устройства, которая является внешней по отношению к предлагаемым техническим решениям (способу и системе).
Предлагаемая система (фиг.6, 7), осуществляющая заявленный способ, содержит антенное устройство 1, узел 2 инерциального измерения параметров вектора визирования неподвижного ОВ, узел преобразования сигналов начального назначения угла наклона и азимута неподвижного ОВ, узел 3 инерциального автосопровождения неподвижного ОВ по углу наклона, узел 4 инерциального автосопровождения неподвижного ОВ по азимуту, узел 5 инерциального автосопровождения неподвижного ОВ по дальности, узел 6 гиростабилизации и управления направлением зеркала антенного устройства 1 на неподвижный ОВ по углу наклона, узел 7 гиростабилизации и управления направлением зеркала антенного устройства 1 на неподвижный ОВ по азимуту, узел 8 формирования сигналов учета переменной электрической редукции, узел 9 преобразования выходных сигналов гироскопического ДУС и входного сигнала датчика момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа, узел 10 преобразования выходных сигналов акселерометров, узел 11 преобразования сигналов составляющих пространственной угловой координаты неподвижного ОВ, узел 12 преобразования входных сигналов датчиков момента управления направлением поворота наружной рамки и внутренней рамки трехосного карданова подвеса ротора гироскопа, узел 13 преобразования сигналов датчиков угла поворота рамок двухосного карданова подвеса антенного устройства 1, узел 14 формирования сигналов стабилизации и самонаведения подвижного носителя на неподвижный ОВ.
При этом антенное устройство 1 включает в свой состав зеркало 15 с облучателем 16, двухосный карданов подвес 17, ось вращения 18 наружной рамки 19 которого установлена на основании 20 антенного устройства 1, а ось вращения 21 внутренней рамки 22 установлена в наружной рамке 19 перпендикулярно к ее оси вращения 18, электродвигатель 23 поворота наружной рамки 19 карданова подвеса 17 и электродвигатель 24 поворота внутренней рамки 22 двухосного карданова подвеса 17, датчик угла 25 поворота наружной рамки 19 карданова подвеса 17 и датчик угла 26 поворота внутренней рамки 22 карданова подвеса 17 соответственно по углу наклона и по азимуту, а также управляемый трехстепенной гироскоп 27, двухканальный гироскопический ДУС 28, три однокомпонентных измерителя 29, 30, 31 линейного ускорения.
Управляемый трехстепенной гироскоп 27 установлен во внутренней рамке 22 двухосного карданова подвеса 17 антенного устройства 1 так, что направление кинетического момента его ротора 32 в заарретированном положении гироскопа 27 совпадают с нулевым направлением линии визирования антенного устройства 1.
Гироскоп 27 (фиг.7) содержит трехосный карданов подвес 33 ротора 32, датчик угла 34 прецессии внутренней рамки 35 трехосного карданова подвеса 33 ротора 32 и датчик угла 36 прецессии наружной рамки 37 трехосного карданова подвеса 33 ротора 32, датчик момента 38 управления направлением поворота внутренней рамки 35 трехосного карданова подвеса 33 ротора 32 и датчик момента 39 управления направлением поворота наружной рамки 37 трехосного карданова подвеса 33 ротора 32. При этом ось собственного вращения 40 ротора 32 установлена во внутренней рамке 35 трехосного карданова подвеса 33 ротора 32, ось вращения 41 которой установлена в наружной рамке 37 трехосного карданова подвеса 33 ротора 32, ось вращения 42 которой, в свою очередь, установлена в корпусе гироскопа 27. Причем корпус гироскопа 27 жестко закреплен во внутренней рамке 22 двухосного карданова подвеса 17 антенного устройства 1. На соответствующих осях вращения 41 и 42 рамок 35 и 37 карданова подвеса 33 ротора 32 установлены соответственно датчики угла 34 и 36 прецессии внутренней рамки 35 и наружной рамки 37 трехосного карданова подвеса 33 ротора 32, выходы которых соответственно соединены с входом узлов 7 и 6 гиростабилизации и управления направлением зеркала антенного устройства на неподвижный ОВ по азимуту и по углу наклона, выходы которых, в свою очередь, соединены соответственно с электродвигателями поворота внутренней 22 и наружной 19 рамкой двухосного карданова подвеса 17 антенного устройства 1, а также соответственно - датчики момента 38 и 39 управления направлением поворота внутренней рамки 35 и наружной рамки 37 трехосного карданова подвеса 33 ротора 32.
Двухканальный гироскопический ДУС 28 (фиг.7) установлен во внутренней рамке 22 двухосного карданова подвеса 17 антенного устройства 1 так, что в заарретированном положении одна из его осей чувствительности совпадает с нулевым направлением линии визирования антенного устройства, а другая его ось чувствительности ориентирована, например, вверх вдоль положительного направления оси вращения 21 внутренней рамки 22 двухосного карданова подвеса 17 антенного устройства 1. При этом направление кинетического момента ротора 32 ДУС 28 совпадает с положительным направлением оси вращения 18 наружной рамки 37 двухосного карданова подвеса антенного устройства 1. Причем выход датчиков угла прецессии внутренней и наружной рамок трехосного карданова подвеса ротора гироскопического ДУС 28 соединены соответственно с входом усилителей 48 и 49 сигналов обратной связи, выходы которых соединены соответственно с датчиками момента внутренней и наружной рамок ДУС, благодаря чему реализуется электрическая пружина, обеспечивающая возможность снимать с датчиков угла прецессии сигналы, пропорциональные составляющим вектора угловой скорости вращения ДУС. Все три однокомпонентных измерителя 29, 30, 31 линейного ускорения установлены во внутренней рамке 22 двухосного карданова подвеса 17 антенного устройства 1 так, что ось чувствительности одного из них взаимно ортогональна по отношению к взаимно ортогональным осям чувствительности двух других однокомпонентных измерителей линейного ускорения. Ось чувствительности одного из трех однокомпонентных измерителей линейного ускорения совпадает в заарретированном положении с нулевым положением линии визирования антенного устройства 1.
При этом гироскоп 27, гироскопический ДУС 28 и три акселерометра 29, 30, 31 образуют блок гироинерциальных датчиков, интегрированных в антенное устройство 1, и являются датчиками первичной информации для узла 2 инерциального измерения параметров вектора визирования неподвижного ОВ.
Зеркало 15 антенного устройства 1 выполнено с возможностью поворота в двух взаимно перпендикулярных плоскостях с помощью двухстепенного шарнира 43 относительно центра излучения облучателя 16, жестко закрепленного на основании 20 антенного устройства 1. Зеркало 15 шарнирно соединено жесткими тягами 44 и 45 соответственно с наружной рамкой 19 и с внутренней рамкой 22 двухосного карданова подвеса 17 антенного устройства 1 так, что расстояние между каждым из шарниров жестких тяг 44 и 45 на задней поверхности зеркала 15 и его центром вращения равно расстоянию между каждым из шарниров, установленных соответственно на наружной рамке 19 и на внутренней рамке 22 двухосного карданова подвеса 17 антенного устройства 1, и центром вращения этих рамок.
В системе, осуществляющей способ, выходы трех однокомпонентных измерителей 29, 30, 31 линейного ускорения соединены соответственно с входами 1, 2 и 3 узла 10 преобразования сигналов 

 Выходы 1, 2 и 3 узла 10 соединены соответственно с входами 1, 2, 3 узла 2 инерциального измерения параметров вектора визирования (ИИПВВ) неподвижного ОВ.
Выходы 1, 2 и 3 узла 10 соединены соответственно с входами 1, 2, 3 узла 2 инерциального измерения параметров вектора визирования (ИИПВВ) неподвижного ОВ.
Выходы двухканального гироскопического ДУС 28, и вход датчика момента 39 соединены соответственно с входами 1, 2, 3 узла 9 преобразования сигналов, пропорциональных проекциям 

 вектора со абсолютной угловой скорости вращения зеркала 15 антенного устройства 1 на соответствующие оси системы координат Оx3y3z3, связанной с зеркалом 15 антенного устройства 1. Причем сигнал, пропорциональный проекции
вектора со абсолютной угловой скорости вращения зеркала 15 антенного устройства 1 на соответствующие оси системы координат Оx3y3z3, связанной с зеркалом 15 антенного устройства 1. Причем сигнал, пропорциональный проекции  также пропорционален сигналу
также пропорционален сигналу  подаваемому на датчик момента 39 управления направлением поворота наружной рамки 37 трехосного карданова подвеса 33 ротора 32. Кроме того, информационная линия связи 46, по которой поступает информационный массив сигналов предстартового начального назначения неподвижного ОВ и начальной выставки инерциального измерения параметров вектора визирования неподвижного ОВ, соединена с информационным седьмым входом 7 узла 2.
подаваемому на датчик момента 39 управления направлением поворота наружной рамки 37 трехосного карданова подвеса 33 ротора 32. Кроме того, информационная линия связи 46, по которой поступает информационный массив сигналов предстартового начального назначения неподвижного ОВ и начальной выставки инерциального измерения параметров вектора визирования неподвижного ОВ, соединена с информационным седьмым входом 7 узла 2.
Выходы датчика угла 25 поворота наружной рамки 19 двухосного карданова подвеса 17 и датчика угла 26 поворота внутренней рамки 22 карданова подвеса 17 соответственно по углу наклона и по азимуту соединены соответственно с входом 1 узла 3 инерциального автосопровождения неподвижного ОВ по углу наклона и с входом 2 узла 4 инерциального автосопровождения неподвижного ОВ по азимуту, а также соединены соответственно с входами 1 и 2 узла 13 преобразования сигналов координат  и
и  и с входами 1 и 2 узла 8 формирования сигналов ΔεH и ΔεA учета переменной электрической редукции между углами поворота направления зеркала 15 антенного устройства и направления линии визирования неподвижного ОВ. Причем выход 1 узла 3 и выход 1 узла 4 соединены соответственно с датчиками момента 39 и 38 управления направлением поворота наружной 37 и внутренней 35 рамок трехосного карданова подвеса 33 ротора 32, а также с входами 1 и 2 узла 12 преобразования входных сигналов датчиков момента 39 и 38 управления направлением поворота наружной 37 и внутренней 35 рамок трехосного карданова подвеса 33 ротора 32. При этом выходы 1 и 2 узла 13 соединены соответственно с входами 3 и 4 узла 8, а также соединены соответственно с входами 5 и 6 узла 14 формирования сигналов стабилизации и автономного самонаведения подвижного носителя на неподвижный ОВ. Выходы 1 и 2 узла 8 соединены соответственно с входами 4 и 5 узла 10, с входами 4 и 5 узла 9.
и с входами 1 и 2 узла 8 формирования сигналов ΔεH и ΔεA учета переменной электрической редукции между углами поворота направления зеркала 15 антенного устройства и направления линии визирования неподвижного ОВ. Причем выход 1 узла 3 и выход 1 узла 4 соединены соответственно с датчиками момента 39 и 38 управления направлением поворота наружной 37 и внутренней 35 рамок трехосного карданова подвеса 33 ротора 32, а также с входами 1 и 2 узла 12 преобразования входных сигналов датчиков момента 39 и 38 управления направлением поворота наружной 37 и внутренней 35 рамок трехосного карданова подвеса 33 ротора 32. При этом выходы 1 и 2 узла 13 соединены соответственно с входами 3 и 4 узла 8, а также соединены соответственно с входами 5 и 6 узла 14 формирования сигналов стабилизации и автономного самонаведения подвижного носителя на неподвижный ОВ. Выходы 1 и 2 узла 8 соединены соответственно с входами 4 и 5 узла 10, с входами 4 и 5 узла 9.
Выходы 1 и 2 узла 2 инерциального измерения параметров вектора визирования неподвижного ОВ соответственно соединены с входами 2 и 1 узла 11 преобразования составляющих пространственной угловой координаты, а выходы 1 и 2 узла 11 преобразования составляющих пространственной угловой координаты соединены соответственно с входом 2 узла 3 инерциального автосопровождения неподвижного ОВ по углу наклона и с входом 1 узла 4 инерциального автосопровождения неподвижного ОВ по азимуту. При этом выходы 3 и 4 узла 2 инерциального измерения параметров вектора визирования неподвижного ОВ соединены соответственно с входами 1 и 2 узла 5 инерциального автосопровождения неподвижного ОВ по дальности. Причем выходы 1 и 2 узла 5 инерциального автосопровождения неподвижного ОВ по дальности соединены соответственно с входами 3 и 4 узла 14 формирования управляющих сигналов стабилизации и автономного самонаведения подвижного носителя на неподвижный ОВ, а выходы 5 и 6 узла 2 инерциального измерения параметров вектора визирования неподвижного ОВ соединены с входами 1 и 2 узла 50 преобразования сигналов начального назначения угла наклона и азимута неподвижного ОВ, выходы 1 и 2 которого соединены соответственно с входом 3 узла 3 инерциального автосопровождения неподвижного ОВ по углу наклона и с входом 3 узла 4 инерциального автосопровождения неподвижного ОВ по азимуту. Информационная линия связи 47, по которой поступает информационный массив сигналов стабилизации и автономного самонаведения подвижного носителя, соединена с входом аппаратуры управления рулями вращающегося по крену подвижного носителя антенного устройства, которая является внешней по отношению к предлагаемой системе, осуществляющей заявленный способ.
Работа предлагаемой системы, осуществляющей способ, выполняется следующим образом.
При предстартовой подготовке и управлении пуском подвижного носителя антенного устройства БССН в режиме начальной выставки и начального назначения неподвижного ОВ на информационный вход узла 2 по информационной линии связи 46 (по стандартному цифровому каналу ARING 429) из внешней аппаратуры подготовки и управления пуском на приемник последовательного кода поступает информационный массив, состоящий, например, из 20-ти 32-разрядных слов:
- контрольное слово,
- L0 - начальное значение наклонной дальности сближения с неподвижным ОВ основания антенного устройства вместе с подвижным носителем,
-  - начальное значение скорости изменения наклонной дальности сближения с неподвижным ОВ подвижного носителя вместе с основанием антенного устройства,
- начальное значение скорости изменения наклонной дальности сближения с неподвижным ОВ подвижного носителя вместе с основанием антенного устройства,
- 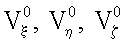 - начальные значения проекций вектора
- начальные значения проекций вектора  линейной скорости подвижного носителя на оси местной горизонтальной системы координат Oξηζ, (фиг.1),
линейной скорости подвижного носителя на оси местной горизонтальной системы координат Oξηζ, (фиг.1),
- ξ0, η0, ζ0 - начальные значения декартовых координат неподвижного ОВ в местной горизонтальной системе координат Oξηζ,
- λ0, φ0 - начальные значения долготы и географической широты подвижного носителя антенного устройства в момент старта (фиг.1),
- ψ0, ϑ0, γ0 - начальные значения рыскания, тангажа, крена в момент старта подвижного носителя антенного устройства,
-  - начальные значения угла места (наклона) и азимута неподвижного ОВ, т.е. «вертикальный» и «горизонтальный» пеленг в связанной системе координат
- начальные значения угла места (наклона) и азимута неподвижного ОВ, т.е. «вертикальный» и «горизонтальный» пеленг в связанной системе координат
Ox1y1z1 (фиг.4),
- LПП - наклонная дальность, при достижении которой выдается КПП, по которой реализуется в аппаратуре управления рулевым приводом подвижного носителя его снижение (планирование) и выход на маловысотный конечный участок траектории перемещения к неподвижному ОВ,
- Командное слово, содержащее, например, 15 режимных команд, каждая из которых записывается в соответствующем разряде слова в виде «1» для каждого режима пуска подвижного носителя.
Этот информационный массив по мере изменения взаимного положения подвижного носителя и неподвижного ОВ непрерывно обновляется и перезаписывается. При этом по указанной выше информации в узле 2 реализуется алгоритм формирования начальных условий выставки инерциального измерения параметров вектора визирования (ИИПВВ) неподвижного ОВ в базовой антенной системе координат Oxyz, а именно:
-  - начальные значения горизонтального и вертикального углов визирования неподвижного ОВ в местной горизонтальной системе координат Oξηζ (фиг.3),
- начальные значения горизонтального и вертикального углов визирования неподвижного ОВ в местной горизонтальной системе координат Oξηζ (фиг.3),
-  - начальные значения проекций вектора
- начальные значения проекций вектора  линейной скорости основания антенного устройства вместе с подвижным носителем на оси базовой антенной системы координат Oxyz (фиг.2),
линейной скорости основания антенного устройства вместе с подвижным носителем на оси базовой антенной системы координат Oxyz (фиг.2),
- 
 - начальные значения составляющих пространственной угловой координаты
- начальные значения составляющих пространственной угловой координаты  неподвижного ОВ в базовой антенной системе координат Oxyz (фиг.2),
неподвижного ОВ в базовой антенной системе координат Oxyz (фиг.2),
- 
 - начальные значения долготы и географической широты неподвижного ОВ в момент старта подвижного носителя (фиг.1),
- начальные значения долготы и географической широты неподвижного ОВ в момент старта подвижного носителя (фиг.1),
-  где i, j=1, 2, 3, - матрица начальных значений направляющих косинусов, определяющих взаимное положение базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Сξ0η0ζ0, одна координатная ось которой связана с неподвижным ОВ (фиг.1).
где i, j=1, 2, 3, - матрица начальных значений направляющих косинусов, определяющих взаимное положение базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Сξ0η0ζ0, одна координатная ось которой связана с неподвижным ОВ (фиг.1).
В момент старта подвижного носителя поступление в узел 2 информационного массива предстартового начального назначения подвижного носителя и начальной выставки ИИПВВ прекращается. Одновременно с этим разарретируется трехстепенной гироскоп 27, гироскопический ДУС 28, акселерометры 29, 30, 31 и включается процесс инерциального измерения параметров вектора визирования неподвижного ОВ, алгоритм функционирования которого (19) реализуется в узле 2. При этом сигналы, пропорциональные измеренным проекциям 

 вектора
вектора  с выхода соответствующих акселерометров 29, 30, 31 подаются соответственно на входы 1, 2, 3 узла 10, с выходов 1, 2, 3 которого подаются соответственно на входы 1, 2, 3 узла 2 сигналы, пропорциональные проекциям nx, ny, nz вектора
с выхода соответствующих акселерометров 29, 30, 31 подаются соответственно на входы 1, 2, 3 узла 10, с выходов 1, 2, 3 которого подаются соответственно на входы 1, 2, 3 узла 2 сигналы, пропорциональные проекциям nx, ny, nz вектора  на оси базовой антенной системы координат Oxyz (фиг.9). Эти проекции определяются реализованными в узле 10 алгоритмами (13)…(17). Сигналы, пропорциональные измеренным проекциям
на оси базовой антенной системы координат Oxyz (фиг.9). Эти проекции определяются реализованными в узле 10 алгоритмами (13)…(17). Сигналы, пропорциональные измеренным проекциям 

 вектора
вектора  (фиг.10), с соответствующих выходов гироскопического ДУС 28 и с входа датчика момента 39 поступают соответственно на входы 1, 2, 3 узла 9, с выходов 1, 2, 3 которого подаются соответственно на входы 4, 5, 6 узла 2 сигналы, пропорциональные проекциям ωx, ωy, ωz вектора
(фиг.10), с соответствующих выходов гироскопического ДУС 28 и с входа датчика момента 39 поступают соответственно на входы 1, 2, 3 узла 9, с выходов 1, 2, 3 которого подаются соответственно на входы 4, 5, 6 узла 2 сигналы, пропорциональные проекциям ωx, ωy, ωz вектора  на оси базовой антенной системы координат Oxyz (фиг.10). Эти проекции определяются реализованными в узле 9 алгоритмами (13)…(16) и (18).
на оси базовой антенной системы координат Oxyz (фиг.10). Эти проекции определяются реализованными в узле 9 алгоритмами (13)…(16) и (18).
По полученным сигналам, пропорциональным nx, ny, nz и ωх, ωу, ωz в узле 2 при заданных начальных условиях выставки ИИПВВ и начального назначения неподвижного ОВ определяются согласно алгоритму (19) сигналы, пропорциональные текущим значениям 




 βij (где i, j=1, 2, 3) и Vx, Vy, Vz, L, е1и, е2и, βji (где i, j=1, 2, 3), причем сигналы, пропорциональные составляющим е1и, е2и пространственной угловой координаты, снимаемые соответственно с выходов 1, 2 узла 2 подают соответственно на входы 2 и 1 узла 11. С выходов 3 и 4 узла 2 сигналы, пропорциональные наклонной дальности L0 и скорости ее изменения
βij (где i, j=1, 2, 3) и Vx, Vy, Vz, L, е1и, е2и, βji (где i, j=1, 2, 3), причем сигналы, пропорциональные составляющим е1и, е2и пространственной угловой координаты, снимаемые соответственно с выходов 1, 2 узла 2 подают соответственно на входы 2 и 1 узла 11. С выходов 3 и 4 узла 2 сигналы, пропорциональные наклонной дальности L0 и скорости ее изменения  соответственно поступают на входы 1 и 2 узла 5, а с выходов 1 и 2 узла 5 поступают на входы 3 и 4 узла 14 сигналы, пропорциональные соответственно L0,
соответственно поступают на входы 1 и 2 узла 5, а с выходов 1 и 2 узла 5 поступают на входы 3 и 4 узла 14 сигналы, пропорциональные соответственно L0,  . При этом сигналы начального назначения неподвижного ОВ, пропорциональные начальным значениям угла наклона
. При этом сигналы начального назначения неподвижного ОВ, пропорциональные начальным значениям угла наклона  и азимута
и азимута  с выходов 5 и 6 узла 2 соответственно поступают на вход 3 узла 3 и на вход 3 узла 4. При этом с выхода 1 узла 11 и с выхода 2 узла 11 подают соответственно на вход 2 узла 3 и на вход 1 узла 4 сигналы, пропорциональные соответственно углу е1из и углу е2из, а также с датчика угла наклона 25 и датчика азимута 26 соответственно подаются на вход 1 узла 3 сигнал, пропорциональный
с выходов 5 и 6 узла 2 соответственно поступают на вход 3 узла 3 и на вход 3 узла 4. При этом с выхода 1 узла 11 и с выхода 2 узла 11 подают соответственно на вход 2 узла 3 и на вход 1 узла 4 сигналы, пропорциональные соответственно углу е1из и углу е2из, а также с датчика угла наклона 25 и датчика азимута 26 соответственно подаются на вход 1 узла 3 сигнал, пропорциональный  и на вход 2 узла 4 сигнал, пропорциональный
и на вход 2 узла 4 сигнал, пропорциональный  В результате с выхода 1 узла 3 и с выхода 1 узла 4 на входы 1 и 2 узла 12 соответственно подаются сигналы, пропорциональные угловым скоростям
В результате с выхода 1 узла 3 и с выхода 1 узла 4 на входы 1 и 2 узла 12 соответственно подаются сигналы, пропорциональные угловым скоростям  и
и  Одновременно эти сигналы
Одновременно эти сигналы  и
и  подаются соответственно на датчики момента 39 и 38. При этом с выходов 1 и 2 узла 12 сигналы, пропорциональные угловым скоростям
подаются соответственно на датчики момента 39 и 38. При этом с выходов 1 и 2 узла 12 сигналы, пропорциональные угловым скоростям  и
и  подаются соответственно на входы 1 и 2 узла 14, а на входы 5 и 6 узла 14 поступают сигналы, пропорциональные углу наклона εH и азимуту εA неподвижного ОВ, соответственно с выходов 1 и 2 узла 13. На входы 1 и 2 узла 13 соответственно с датчиков угла 25 и 26 поступают сигналы, пропорциональные углам
подаются соответственно на входы 1 и 2 узла 14, а на входы 5 и 6 узла 14 поступают сигналы, пропорциональные углу наклона εH и азимуту εA неподвижного ОВ, соответственно с выходов 1 и 2 узла 13. На входы 1 и 2 узла 13 соответственно с датчиков угла 25 и 26 поступают сигналы, пропорциональные углам  и
и  которые одновременно поступают соответственно на входы 1 и 2 узла 8. При этом с выходов 1 и 2 узла 8 сигналы, пропорциональные величинам ΔεH и ΔεA, определяемым согласно алгоритму (16), поступают соответственно на входы 4 и 5 узла 9, на входы 4 и 5 узла 10. И, наконец, с выхода узла 14 по информационной линии связи 47 информация, содержащая сигналы автономного самонаведения подвижного носителя на неподвижный ОВ при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем, выдается во внешнюю по отношению к предлагаемой системе аппаратуру управления рулевым приводом подвижного носителя.
которые одновременно поступают соответственно на входы 1 и 2 узла 8. При этом с выходов 1 и 2 узла 8 сигналы, пропорциональные величинам ΔεH и ΔεA, определяемым согласно алгоритму (16), поступают соответственно на входы 4 и 5 узла 9, на входы 4 и 5 узла 10. И, наконец, с выхода узла 14 по информационной линии связи 47 информация, содержащая сигналы автономного самонаведения подвижного носителя на неподвижный ОВ при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем, выдается во внешнюю по отношению к предлагаемой системе аппаратуру управления рулевым приводом подвижного носителя.
При этом при подаче сформированных длиннопериодических сигналов, пропорциональных угловым скоростям  и
и  определяющих текущее направление зеркала 15 антенного устройства 1 на неподвижный ОВ соответственно в горизонтальной плоскости по углу визирования
определяющих текущее направление зеркала 15 антенного устройства 1 на неподвижный ОВ соответственно в горизонтальной плоскости по углу визирования  и в вертикальной плоскости по углу визирования
и в вертикальной плоскости по углу визирования  с выходов 1 узла 4 и узла 3 на соответствующие датчики момента 38 и 39 трехосного управляемого гироскопа 27 создаются длиннопериодические возмущающие управляющие моменты, которые согласно прецессионной теории гироскопа вызывают момент гироскопической реакции, т.е. гироскопический момент, в опорах осей 41 и 42 прецессии соответствующих рамок 35 и 37 трехосного карданова подвеса 33 ротора 32. При этом возникает длиннопериодическое прецессионное отклонение рамок 35 и 37 трехосного карданова подвеса 33 ротора 32 с угловыми скоростями, близкими по величине угловым скоростям
с выходов 1 узла 4 и узла 3 на соответствующие датчики момента 38 и 39 трехосного управляемого гироскопа 27 создаются длиннопериодические возмущающие управляющие моменты, которые согласно прецессионной теории гироскопа вызывают момент гироскопической реакции, т.е. гироскопический момент, в опорах осей 41 и 42 прецессии соответствующих рамок 35 и 37 трехосного карданова подвеса 33 ротора 32. При этом возникает длиннопериодическое прецессионное отклонение рамок 35 и 37 трехосного карданова подвеса 33 ротора 32 с угловыми скоростями, близкими по величине угловым скоростям  и
и  изменения углов визирования неподвижного ОВ. В результате с выхода датчиков 34 и 36 угла прецессии длиннопериодические сигналы, пропорциональные рассогласованию между направлением кинетического момента
изменения углов визирования неподвижного ОВ. В результате с выхода датчиков 34 и 36 угла прецессии длиннопериодические сигналы, пропорциональные рассогласованию между направлением кинетического момента  ротора 32 и задаваемым соответствующими выходными сигналами узла 4
ротора 32 и задаваемым соответствующими выходными сигналами узла 4  и узла 3
и узла 3  направлением на неподвижный ОВ зеркала 15 антенного устройства 1, поступают соответственно на вход узла 7 гиростабилизации и управления направлением на неподвижный ОВ зеркала 15 антенного устройства 1 по азимуту и на вход узла 6 гиростабилизации и управления направлением на неподвижный ОВ зеркала 15 антенного устройства 1 по углу наклона. С выхода узла 7 гиростабилизации и управления зеркалом 15 по азимуту и с выхода узла 6 гиростабилизации и управления зеркалом 15 по углу наклона сформированные длиннопериодические сигналы подаются на обмотки управления соответствующих электродвигателей 24 и 23 вращения рамок 22 и 19 двухосного карданова подвеса 17 антенного устройства 1. По этим длиннопериодическим сигналам электродвигатели 24 и 23 развивают длиннопериодические вращающие моменты, равные и совпадающие по направлению с направлением соответствующих длиннопериодических возмущающих управляющих моментов, для поворота наружной 19 и внутренней 22 рамок двухосного карданова подвеса 17 антенного устройства 1 и шарнирно связанного с ним зеркала 15 в текущее направление на неподвижный ОВ. При этом на выходе соответственно датчика угла 25 поворота наружной рамки 19 и датчика угла 26 поворота внутренней рамки 22 двухосного карданова подвеса 17 антенного устройства 1 формируются длиннопериодические сигналы, пропорциональные соответственно текущим значениям угла наклона и азимута неподвижного ОВ относительно основания 20 антенного устройства 1.
направлением на неподвижный ОВ зеркала 15 антенного устройства 1, поступают соответственно на вход узла 7 гиростабилизации и управления направлением на неподвижный ОВ зеркала 15 антенного устройства 1 по азимуту и на вход узла 6 гиростабилизации и управления направлением на неподвижный ОВ зеркала 15 антенного устройства 1 по углу наклона. С выхода узла 7 гиростабилизации и управления зеркалом 15 по азимуту и с выхода узла 6 гиростабилизации и управления зеркалом 15 по углу наклона сформированные длиннопериодические сигналы подаются на обмотки управления соответствующих электродвигателей 24 и 23 вращения рамок 22 и 19 двухосного карданова подвеса 17 антенного устройства 1. По этим длиннопериодическим сигналам электродвигатели 24 и 23 развивают длиннопериодические вращающие моменты, равные и совпадающие по направлению с направлением соответствующих длиннопериодических возмущающих управляющих моментов, для поворота наружной 19 и внутренней 22 рамок двухосного карданова подвеса 17 антенного устройства 1 и шарнирно связанного с ним зеркала 15 в текущее направление на неподвижный ОВ. При этом на выходе соответственно датчика угла 25 поворота наружной рамки 19 и датчика угла 26 поворота внутренней рамки 22 двухосного карданова подвеса 17 антенного устройства 1 формируются длиннопериодические сигналы, пропорциональные соответственно текущим значениям угла наклона и азимута неподвижного ОВ относительно основания 20 антенного устройства 1.
При круговом вращении основания 20 антенного устройства 1 вместе с вращающимся по крену подвижным носителем наружная 19 и внутренняя 22 рамки двухосного карданова подвеса 17 антенного устройства 1 совершают короткопериодические (в простейшем случае - гармонические) колебания соответственно относительно своих осей вращения 42 и 41. Следовательно, при круговом вращении основания 20 на выходе соответственно датчиков угла 25 и 26 поворота наружной 19 и внутренней 22 рамок одновременно с длиннопериодическими сигналами, пропорциональными угловым скоростям  и
и  формируются сигналы, пропорциональные амплитуде и частоте короткопериодических колебаний, сдвинутых по фазе на 90 градусов, наружной 19 и внутренней 22 рамок двухосного карданова подвеса 17 антенного устройства 1 и шарнирно связанного с ним зеркала 15 антенного устройства 1. Кроме того, одновременно аддитивно на выходе датчиков угла 25 и 26 также формируются короткопериодические сигналы, пропорциональные имеющим место колебаниям подвижного носителя антенного устройства 1 по рысканию ψ и тангажу ϑ которые воздействуют на основание 20 антенного устройства 1 при одновременном его вращении по крену вместе с подвижным носителем.
формируются сигналы, пропорциональные амплитуде и частоте короткопериодических колебаний, сдвинутых по фазе на 90 градусов, наружной 19 и внутренней 22 рамок двухосного карданова подвеса 17 антенного устройства 1 и шарнирно связанного с ним зеркала 15 антенного устройства 1. Кроме того, одновременно аддитивно на выходе датчиков угла 25 и 26 также формируются короткопериодические сигналы, пропорциональные имеющим место колебаниям подвижного носителя антенного устройства 1 по рысканию ψ и тангажу ϑ которые воздействуют на основание 20 антенного устройства 1 при одновременном его вращении по крену вместе с подвижным носителем.
Под этим воздействием возникают короткопериодические возмущающие моменты, которые, в свою очередь, вызывают моменты гироскопической реакции в опорах осей 41 и 42 прецессии соответствующих рамок 35 и 37 трехосного карданова подвеса 33 ротора 32. Вследствие этого возникают аддитивные короткопериодические колебания соответствующих рамок 35 и 37 трехосного карданова подвеса 33 ротора 32 с угловыми скоростями, направление вектора которых совпадает с направлением векторов аддитивных короткопериодических возмущающих моментов. В результате с выхода датчиков угла прецессии 34 и 36 аддитивные короткопериодические сигналы, пропорциональные рассогласованию между направлением кинетического момента  ротора 32 и направлением вектора аддитивных короткопериодических возмущающих моментов, поступают соответственно на вход узла 6 и на вход узла 7. С выхода узла 6 и с выхода узла 7 сформированные аддитивные короткопериодические сигналы подаются на обмотки управления соответствующих электродвигателей 23 и 24 вращения рамок 19 и 22 двухосного карданова подвеса 17 антенного устройства 1.
ротора 32 и направлением вектора аддитивных короткопериодических возмущающих моментов, поступают соответственно на вход узла 6 и на вход узла 7. С выхода узла 6 и с выхода узла 7 сформированные аддитивные короткопериодические сигналы подаются на обмотки управления соответствующих электродвигателей 23 и 24 вращения рамок 19 и 22 двухосного карданова подвеса 17 антенного устройства 1.
Под воздействием этих аддитивных короткопериодических сигналов электродвигатели 23 и 24 развивают аддитивные короткопериодические вращающие моменты, равные и противоположно направленные соответственно аддитивным короткопериодическим возмущающим моментам, действующим вокруг соответствующих осей вращения 41 и 42 внутренней 22 и наружной 19 рамок двухосного карданова подвеса 17 антенного устройства 1, для отработки аддитивных короткопериодических сигналов, обусловленных круговым вращением основания 20 антенного устройства 1 вместе с вращающимся по крену γ подвижным носителем и колебаниями зеркала 15 по рысканию ψ и по тангажу ϑ в текущем стабилизированном направлении на неподвижный ОВ. При этом электродвигатели 23 и 24 одновременно отрабатывают сигналы, пропорциональные угловой скорости короткопериодических колебаний рамок 19 и 22 двухосного карданова подвеса 17 антенного устройства 1, значение амплитуды которой в несколько раз, а при малых углах  и
и  визирования неподвижного ОВ до 7 градусов - на порядок меньше угловой скорости вращения по крену γ подвижного носителя антенного устройства 1. Вследствие этого обеспечивается реализация допустимого динамического диапазона измеряемых угловых скоростей гироскопическими ДУС.
визирования неподвижного ОВ до 7 градусов - на порядок меньше угловой скорости вращения по крену γ подвижного носителя антенного устройства 1. Вследствие этого обеспечивается реализация допустимого динамического диапазона измеряемых угловых скоростей гироскопическими ДУС.
В результате отработки электродвигателями 23 и 24 аддитивных короткопериодических сигналов с выхода соответствующих датчиков угла 25 и 26 поворота наружной и внутренней рамок 19 и 22 двухосного карданова подвеса 17 антенного устройства 1 сигналы  и
и  пропорциональные амплитуде и частоте короткопериодических колебаний рамок 19 и 22, подаются соответственно на входы 1 и 2 узла 8. При этом по сформированным длиннопериодическим управляющим сигналам, пропорциональным скоростям
пропорциональные амплитуде и частоте короткопериодических колебаний рамок 19 и 22, подаются соответственно на входы 1 и 2 узла 8. При этом по сформированным длиннопериодическим управляющим сигналам, пропорциональным скоростям  и
и  изменения углов
изменения углов  и
и  визирования неподвижного ОВ, определяющих текущее стабилизированное от аддитивных короткопериодических колебаний направление зеркала 15 антенного устройства 1 на неподвижный ОВ в горизонтальной и в вертикальной плоскости, производится инерциальное управление стабилизированным направлением зеркала 15 антенного устройства 1 на неподвижный ОВ при круговом вращении основания 20 антенного устройства 1 вместе с вращающимся по крену γ подвижным носителем.
визирования неподвижного ОВ, определяющих текущее стабилизированное от аддитивных короткопериодических колебаний направление зеркала 15 антенного устройства 1 на неподвижный ОВ в горизонтальной и в вертикальной плоскости, производится инерциальное управление стабилизированным направлением зеркала 15 антенного устройства 1 на неподвижный ОВ при круговом вращении основания 20 антенного устройства 1 вместе с вращающимся по крену γ подвижным носителем.
Одновременно в узле 14 согласно алгоритмам (27) и (28) формируются сигналы автономного самонаведения вращающегося по крену γ подвижного носителя на неподвижный ОВ, пропорциональные, например, задаваемым управляющим перегрузкам в вертикальной  и в горизонтальной
и в горизонтальной  плоскостях, которые являются функциями модуля наклонной скорости
плоскостях, которые являются функциями модуля наклонной скорости  сближения с неподвижным ОВ основания 20 антенного устройства 1 вместе с вращающимся по крену подвижным носителем, и скоростям
сближения с неподвижным ОВ основания 20 антенного устройства 1 вместе с вращающимся по крену подвижным носителем, и скоростям  и
и  изменения соответствующих углов визирования неподвижного ОВ в горизонтальной и в вертикальной плоскости.
изменения соответствующих углов визирования неподвижного ОВ в горизонтальной и в вертикальной плоскости.
Сигналы, пропорциональные перегрузкам  и
и  с выхода узла 14 по информационной линии связи 47 в составе информационного массива инерциального самонаведения на неподвижный ОВ и стабилизации подвижного носителя поступают на соответствующие входы аппаратуры управления рулями подвижного носителя антенного устройства 1, которая является внешней по отношению к предлагаемым техническим решениям (способу и системе).
с выхода узла 14 по информационной линии связи 47 в составе информационного массива инерциального самонаведения на неподвижный ОВ и стабилизации подвижного носителя поступают на соответствующие входы аппаратуры управления рулями подвижного носителя антенного устройства 1, которая является внешней по отношению к предлагаемым техническим решениям (способу и системе).
Таким образом, предлагаемые технические решения обеспечивают достижение положительного эффекта, заключающегося в следующем.
Обеспечивают инерциальное управление направлением зеркала антенного устройства на неподвижный ОВ при круговом вращении основания антенного устройства, установленного жестко внутри корпуса вращающегося по крену подвижного носителя, с одновременным автономным самонаведением подвижного носителя на неподвижный ОВ.
Это достигается благодаря такой кинематической схеме антенного устройства (фиг.6, 7) системы, которая позволяет разместить во внутренней рамке двухосного карданова подвеса, шарнирно связанного с зеркалом антенного устройства, управляемый трехстепенной гироскоп, являющийся чувствительным элементом следящего гиропривода и инерциального измерения параметров вектора визирования неподвижного ОВ, а также позволяет разместить соответствующим образом во внутренней рамке упомянутого двухосного карданова подвеса двухканальный гироскопический ДУС и три однокомпонентных акселерометра.
При перемещении вращающегося по крену подвижного носителя по направлению к неподвижному ОВ по сигналам указанных гироинерциальных датчиков, пропорциональным первичной информации о проекциях вектора кажущегося линейного ускорения движения и вектора абсолютной угловой скорости поворота зеркала антенного устройства на оси базовой антенной системы координат Oxyz, реализуется в узле 2 системы алгоритм (19) инерциального измерения параметров вектора визирования неподвижного ОВ.
На выходе узла 2 формируются сигналы, пропорциональные параметрам L0, L, e1, е2 вектора  визирования неподвижного ОВ, характеризующего его положение в базовой антенной системе координат Oxyz, являющиеся входными сигналами соответственно узла 5 инерциального измерения параметров вектора визирования неподвижного ОВ по дальности, узла 4 инерциального автосопровождения неподвижного ОВ по углу наклона, узла 3 инерциального автосопровождения неподвижного ОВ по азимуту.
визирования неподвижного ОВ, характеризующего его положение в базовой антенной системе координат Oxyz, являющиеся входными сигналами соответственно узла 5 инерциального измерения параметров вектора визирования неподвижного ОВ по дальности, узла 4 инерциального автосопровождения неподвижного ОВ по углу наклона, узла 3 инерциального автосопровождения неподвижного ОВ по азимуту.
При этом алгоритм (19) измерения параметров вектора визирования неподвижного ОВ в базовой антенной системе координат Oxyz, реализованный в узле 2 предлагаемой системы, входящем в замкнутые контура инерциального автосопровождения неподвижного ОВ, выполняет функцию дискриминатора сигналов рассогласования (ошибки):
- по наклонной дальности ΔL между перемещающимся по траектории и вращающимся по крену подвижным носителем и неподвижным ОВ (фиг.11, 12),
- между направлением оптической оси зеркала антенного устройства, или, что то же самое, между направлением кинетического момента ротора управляемого трехстепенного гироскопа и направлением на неподвижный ОВ в двух взаимно перпендикулярных плоскостях базовой антенной системы координат Oxyz, т.е. по углу e1 и по углу е2, отсчитываемым относительно оптической оси зеркала антенного устройства (фиг.11, 12).
Рассогласования (ошибки) e1 и е2 аналогичны соответствующим рассогласованиям между направлением линии визирования антенны, т.е. максимумом диаграммы направленности излучаемой, например, электромагнитной энергии и направлением на цель, определяемым угловым дискриминатором замкнутых контуров радиолокационного автосопровождения цели по направлению. В этом смысле они являются идентичными.
Вследствие того, что в замкнутых контурах инерциального автосопровождения неподвижного ОВ по дальности, по углу наклона и по азимуту, реализованных в предлагаемой системе (фиг.6), на выходе 1 узла 3 и на выходе 1 узла 4 формируются длиннопериодические сигналы, стабилизированные от возмущающих аддитивных короткопериодических колебаний направления зеркала антенного устройства, пропорциональные текущим значениям соответствующих скоростей  и
и  изменения вертикального и горизонтального углов визирования неподвижного ОВ. Эти длиннопериодические сигналы в замкнутых контурах автосопровождения неподвижного ОВ подаются соответственно на датчики момента 39 и 38 управления направлением кинетического момента ротора управляемого трехстепенного гироскопа. Следовательно, сигналы
изменения вертикального и горизонтального углов визирования неподвижного ОВ. Эти длиннопериодические сигналы в замкнутых контурах автосопровождения неподвижного ОВ подаются соответственно на датчики момента 39 и 38 управления направлением кинетического момента ротора управляемого трехстепенного гироскопа. Следовательно, сигналы  и
и  интегрируются с помощью узлов гиростабилизации и управления направлением зеркала антенного устройства на неподвижный ОВ и отрабатываются относительно начальных значений угла наклона
интегрируются с помощью узлов гиростабилизации и управления направлением зеркала антенного устройства на неподвижный ОВ и отрабатываются относительно начальных значений угла наклона  и азимута
и азимута  неподвижного ОВ, заданных при предстартовой подготовке подвижного носителя, в связанной системе координат Ox1y1z1 (фиг.4) путем разворота направления зеркала антенного устройства относительно его основания на неподвижный ОВ. При этом контуры инерциального автосопровождения замыкаются вследствие подачи на вход 1 узла 3 и на вход 2 узла 4 отработанных сигналов, пропорциональных соответственно
неподвижного ОВ, заданных при предстартовой подготовке подвижного носителя, в связанной системе координат Ox1y1z1 (фиг.4) путем разворота направления зеркала антенного устройства относительно его основания на неподвижный ОВ. При этом контуры инерциального автосопровождения замыкаются вследствие подачи на вход 1 узла 3 и на вход 2 узла 4 отработанных сигналов, пропорциональных соответственно  и
и  снимаемых с выхода датчиков угла 25 и 26 соответственно.
снимаемых с выхода датчиков угла 25 и 26 соответственно.
Одновременно по сигналам, пропорциональным модулю наклонной скорости  сближения с неподвижным ОВ основания антенного устройства вместе с вращающимся по крену подвижным носителем, угловой скорости
сближения с неподвижным ОВ основания антенного устройства вместе с вращающимся по крену подвижным носителем, угловой скорости  и
и  изменения соответственно вертикального и горизонтального углов визирования неподвижного ОВ, в узле 14 формируются согласно алгоритмам (26) и (27) сигналы автономного самонаведения вращающегося по крену подвижного носителя на неподвижный ОВ. Сформированные сигналы поступают по информационной линии связи в составе информационного массива сигналов во внешнюю по отношению к заявляемой системе аппаратуру управления рулевым приводом подвижного носителя, вращающегося по крену при его перемещении по траектории к неподвижному ОВ.
изменения соответственно вертикального и горизонтального углов визирования неподвижного ОВ, в узле 14 формируются согласно алгоритмам (26) и (27) сигналы автономного самонаведения вращающегося по крену подвижного носителя на неподвижный ОВ. Сформированные сигналы поступают по информационной линии связи в составе информационного массива сигналов во внешнюю по отношению к заявляемой системе аппаратуру управления рулевым приводом подвижного носителя, вращающегося по крену при его перемещении по траектории к неподвижному ОВ.
Таким образом, в предлагаемой системе, реализующей заявленный способ, на основе инерциального измерения параметров вектора визирования неподвижного ОВ решена задача инерциального управления направлением, стабилизированным от аддитивных короткопериодических возмущающих колебаний, зеркала антенного устройства при круговом вращении его основания вместе с вращающимся по крену подвижным носителем.
При этом также решена задача формирования сигналов автономного самонаведения на неподвижный ОВ подвижного носителя антенного устройства, вращающегося по крену и перемещающегося по траектории, определяемой предстартовым назначением неподвижного ОВ и начальными условиями выставки инерциального измерения параметров вектора визирования неподвижного ОВ.
Как показала техническая разработка интегрированной БССН с входящими в ее состав техническими решениями на базе инерциального измерения параметров вектора визирования неподвижного ОВ в базовой антенной системе координат Oxyz, исключена необходимость использования в комплексе бортового аппаратного оснащения вращающегося по крену подвижного носителя дорогостоящей традиционной инерциальной системы навигации, а также радиовысотомера. Благодаря этому освобождается существенный объем (отсек) подвижного носителя либо для возможного увеличения массы топлива для двигательной установки подвижного носителя, либо для увеличения его полезной нагрузки.
Кроме того, при модернизации неуправляемых подвижных носителей, вращающихся по крену, находящихся в эксплуатации и не отвечающих предъявляемым к ним современным тактико-техническим требоавниям, предложенные технические решения исключают необходимость существенной по объему и затратной конструкторской и производственной доработки корпуса и двигательной установки, обеспечивая при этом преобразование неуправляемых вращающихся по крену подвижных носителей в управляемые с высокоточным самонаведением на неподвижные ОВ.
Результаты моделирования подтверждают реализуемость формирования сигналов инерциального управления направлением зеркала антенного устройства на неподвижный ОВ на основе сигналов рассогласования замкнутых контуров инерциального автосопровождения неподвижного ОВ по направлению и по дальности при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем (фиг.11, 12).
Следовательно, заявленные технические решения обеспечивают достижение положительного эффекта.
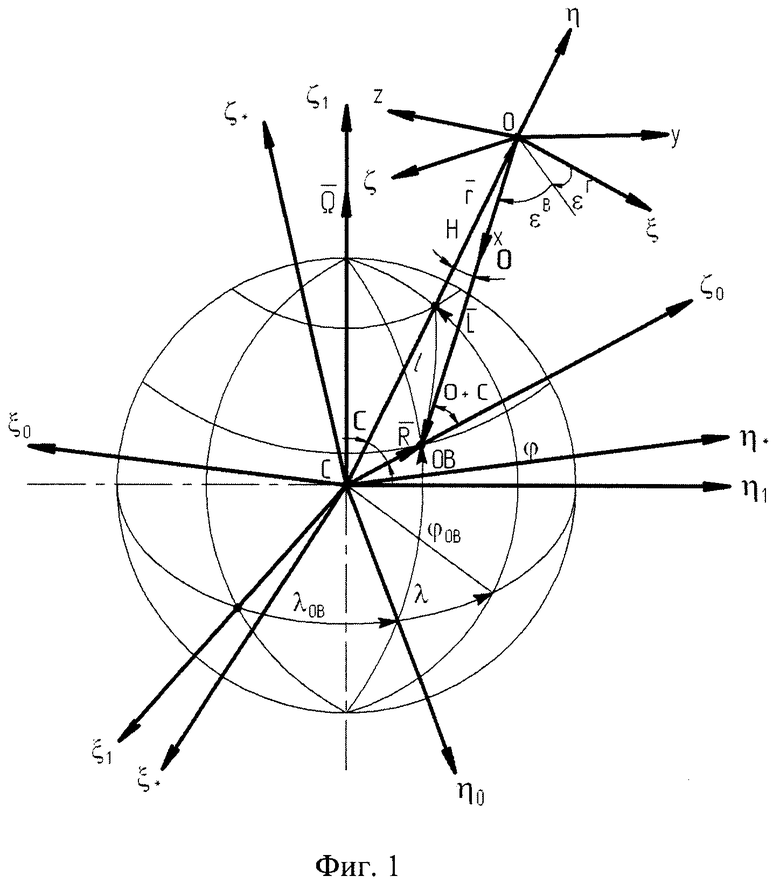
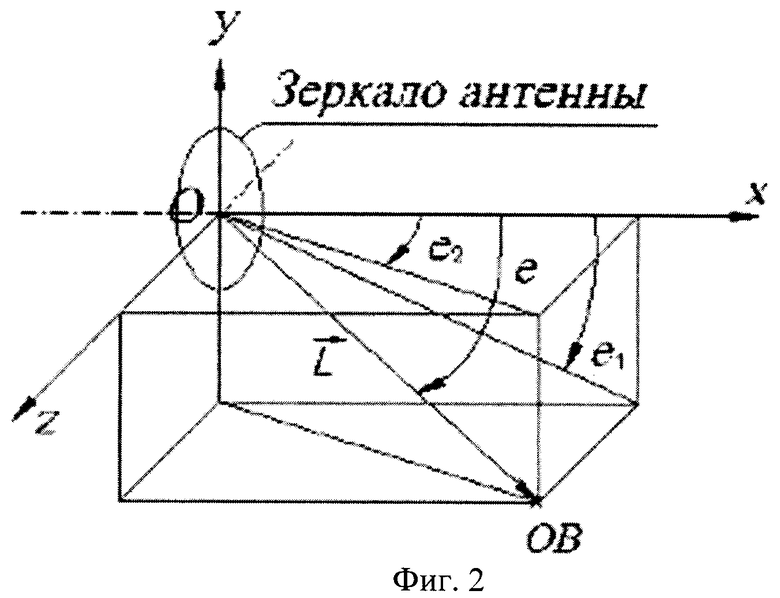
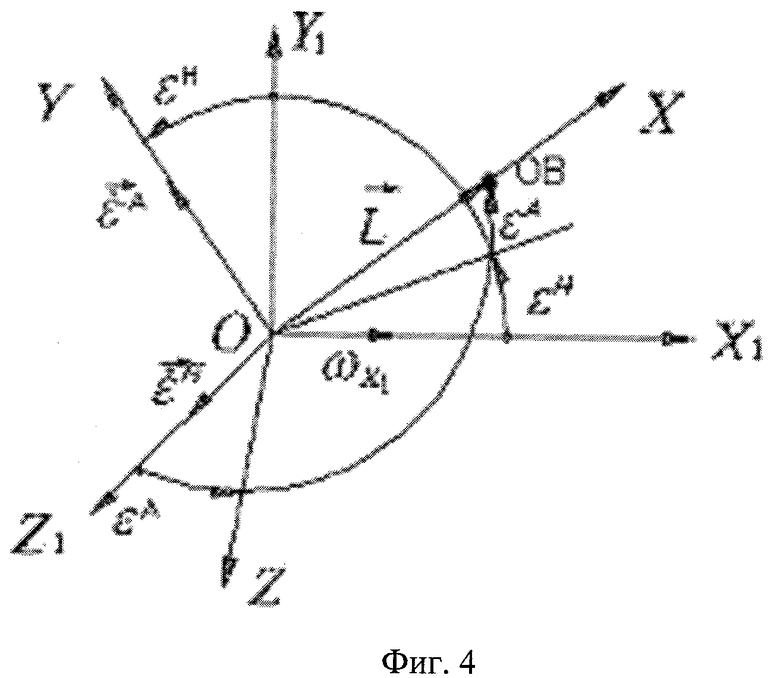

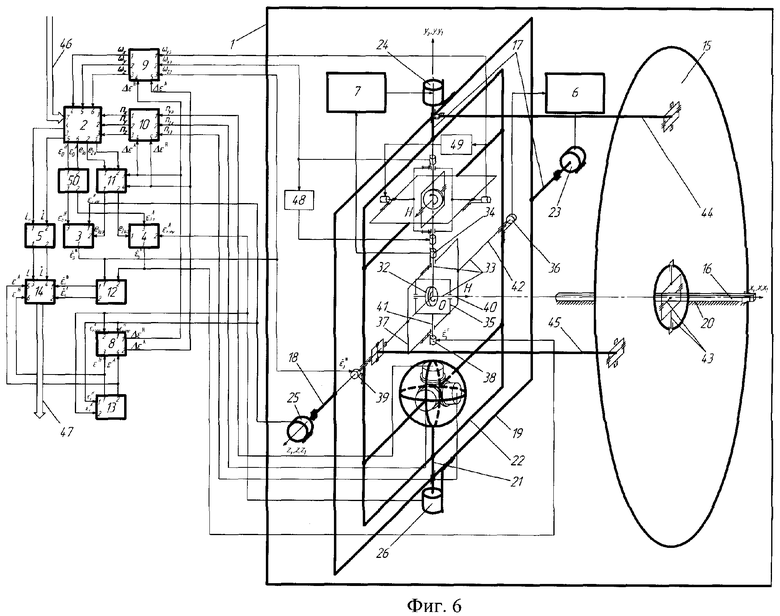
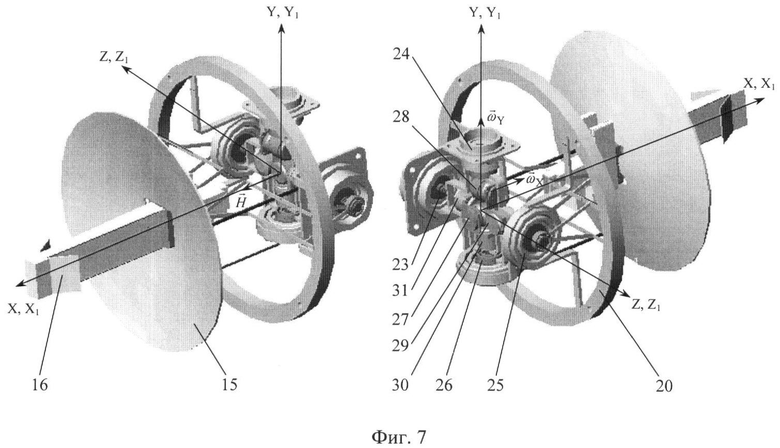
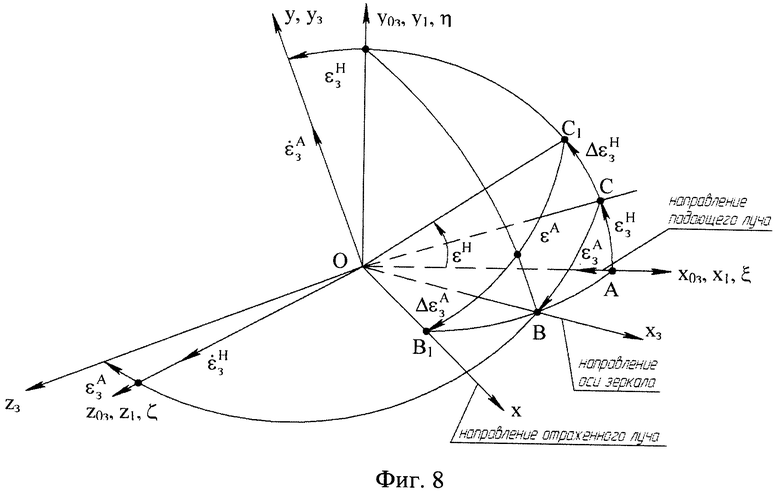
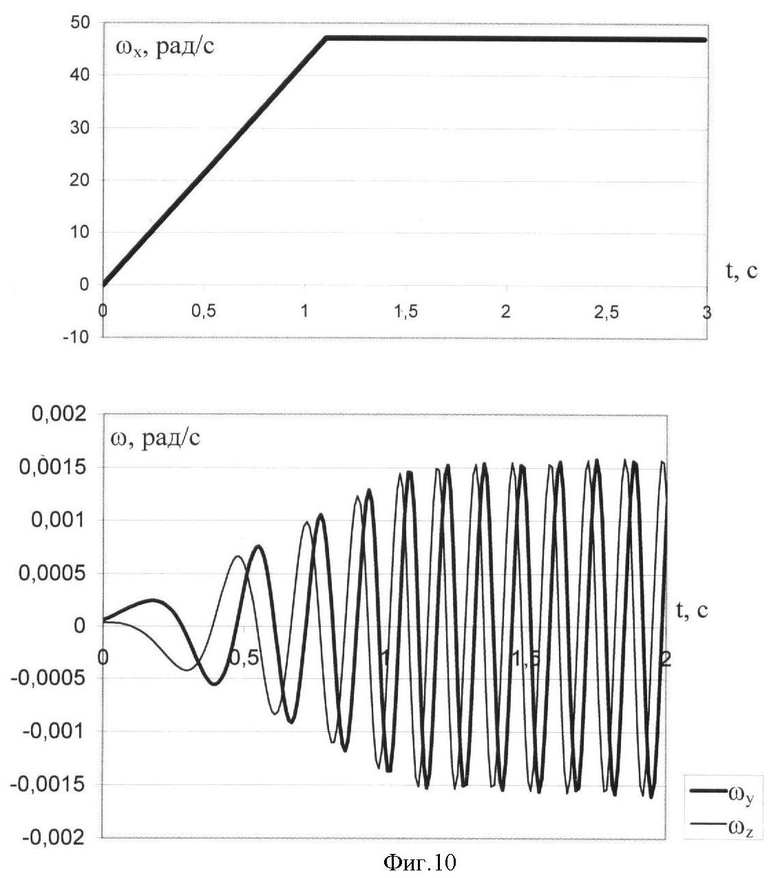
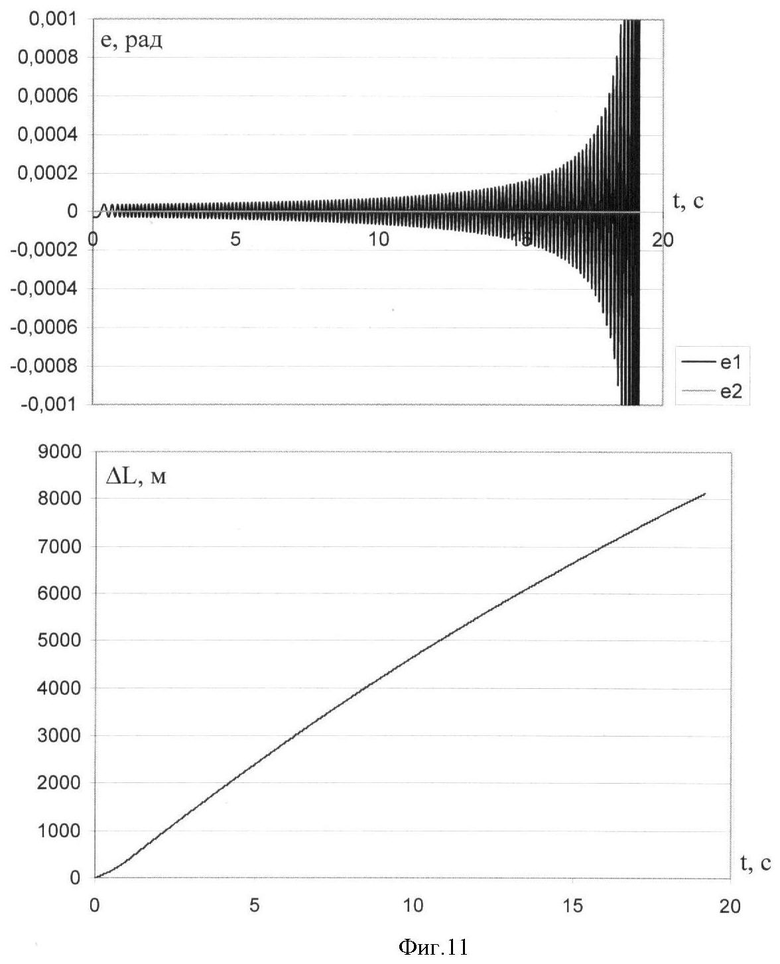
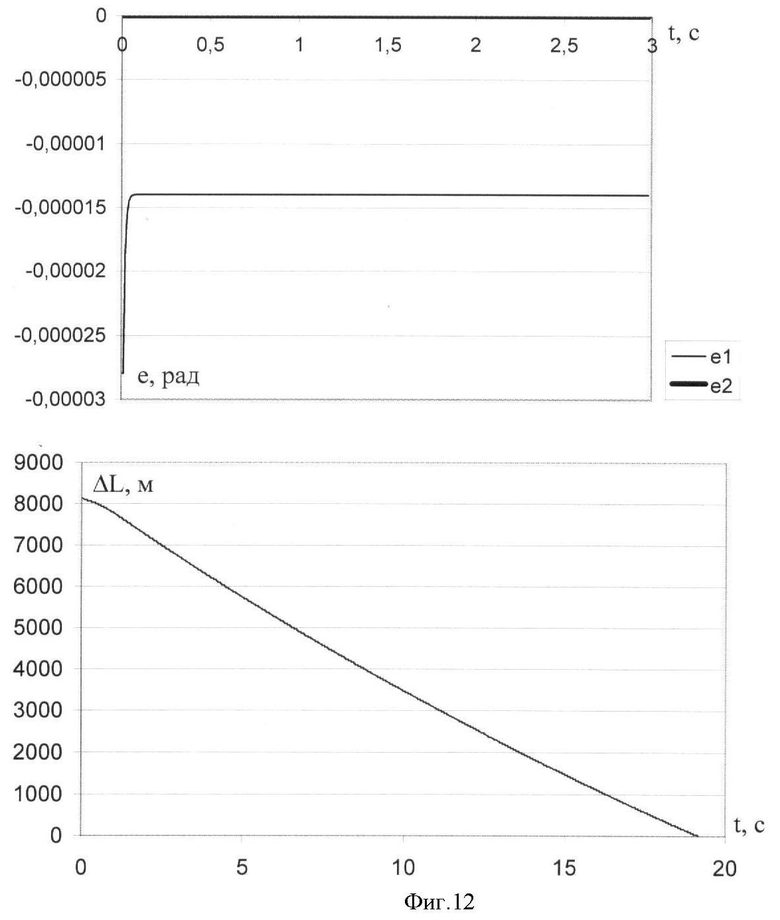
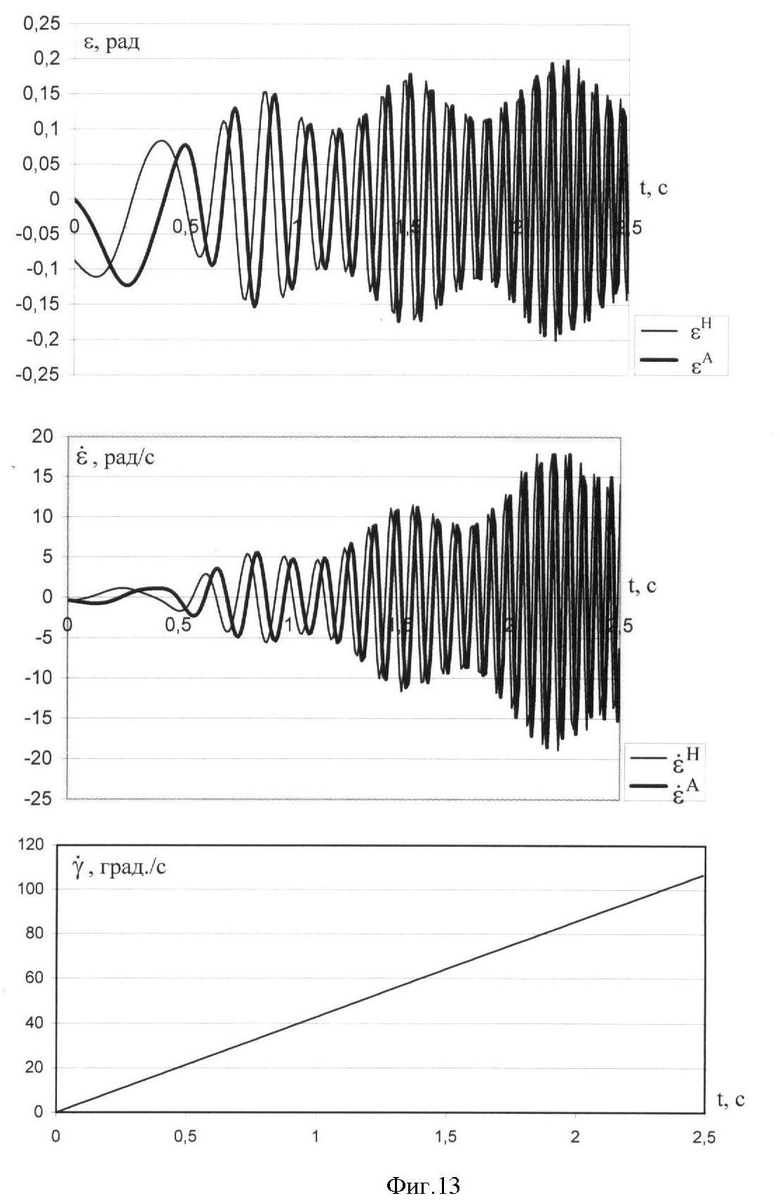
Изобретение относится к устройствам с изменяющейся ориентацией диаграммы направленности волн, излучаемой антенной при неподвижном облучателе антенны, а именно к поворотно-чувствительным устройствам, основанным на использовании гироскопического эффекта. Технический результат - инерциальное управление направлением зеркала антенного устройства на неподвижный объект визирования (ОВ) с одновременным формированием сигналов автономного самонаведения подвижного носителя на неподвижный ОВ при круговом вращении основания антенного устройства, установленного жестко внутри корпуса вращающегося по крену подвижного носителя. Сущность изобретения заключается в том, что при предстартовой подготовке подвижного носителя антенного устройства для инерциального управления направлением его зеркала на неподвижный ОВ при перемещении по траектории после старта вращающегося по крену подвижного носителя определяют и задают начальные координаты взаимного положения подвижного носителя и первоначально назначенного ОВ и начальные условия выставки инерциального измерения параметров вектора визирования (ИИПВВ) неподвижного ОВ. В момент времени старта и в процессе перемещения подвижного носителя по траектории определяют с помощью акселерометров и гироприборов, установленных соответствующим образом во внутренней рамке двухосного карданова подвеса антенного устройства, сигналы, пропорциональные проекциям кажущегося линейного ускорения движения и проекциям вектора абсолютной угловой скорости поворота зеркала антенного устройства на соответствующие оси базовой антенной системы координат. По полученным сигналам с учетом сигналов начальной информации назначения неподвижного ОВ и начальных условий выставки ИИПВВ неподвижного ОВ формируют сигналы, пропорциональные текущим значениям параметров вектора визирования неподвижного ОВ, а именно, наклонной дальности L и наклонной скорости  сближения с неподвижным ОВ основания антенного устройства вместе с подвижным носителем, вращающимся по крену, составляющим e1, е2 пространственной угловой координаты
сближения с неподвижным ОВ основания антенного устройства вместе с подвижным носителем, вращающимся по крену, составляющим e1, е2 пространственной угловой координаты  неподвижного ОВ в базовой антенной системе координат. По сигналам, пропорциональным текущим значениям наклонной дальности L и наклонной скорости сближения с неподвижным ОВ основания антенного устройства вместе с подвижным носителем, осуществляют инерциальное автосопровождение неподвижного ОВ по дальности. Одновременно по полученным сигналам, пропорциональным текущим значениям составляющих e1, е2 пространственной угловой координаты неподвижного ОВ в базовой антенной системе координат, которые являются сигналам рассогласования (ошибки) между направлением оптической оси зеркала антенного устройства и направлением на неподвижный ОВ в двух взаимно перпендикулярных плоскостях в базовой антенной системе координат, осуществляют инерциальное автосопровождение по направлению неподвижного ОВ, назначенного при предстартовой подготовке подвижного носителя. При этом контура инерциального автосопровождения неподвижного ОВ замыкаются по сигналу отрицательной обратной связи, т.е. по сигналу датчиков угла поворота соответственно наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала антенного устройства. Таким образом, осуществляют инерциальное управление стабилизированным от аддитивных короткопериодических колебаний (возмущающих моментов) направлением зеркала антенного устройства на неподвижный ОВ при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем. Одновременно по полученным сигналам, пропорциональным модулю наклонной скорости сближения с неподвижным ОВ основания антенного устройства вместе с вращающимся по крену подвижным носителем и угловой скорости изменения горизонтального и вертикального углов визирования неподвижного ОВ, формируют сигналы автономного самонаведения подвижного носителя вращающегося по крену на неподвижный ОВ. 2 н.п. ф-лы, 13 ил.
неподвижного ОВ в базовой антенной системе координат. По сигналам, пропорциональным текущим значениям наклонной дальности L и наклонной скорости сближения с неподвижным ОВ основания антенного устройства вместе с подвижным носителем, осуществляют инерциальное автосопровождение неподвижного ОВ по дальности. Одновременно по полученным сигналам, пропорциональным текущим значениям составляющих e1, е2 пространственной угловой координаты неподвижного ОВ в базовой антенной системе координат, которые являются сигналам рассогласования (ошибки) между направлением оптической оси зеркала антенного устройства и направлением на неподвижный ОВ в двух взаимно перпендикулярных плоскостях в базовой антенной системе координат, осуществляют инерциальное автосопровождение по направлению неподвижного ОВ, назначенного при предстартовой подготовке подвижного носителя. При этом контура инерциального автосопровождения неподвижного ОВ замыкаются по сигналу отрицательной обратной связи, т.е. по сигналу датчиков угла поворота соответственно наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала антенного устройства. Таким образом, осуществляют инерциальное управление стабилизированным от аддитивных короткопериодических колебаний (возмущающих моментов) направлением зеркала антенного устройства на неподвижный ОВ при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем. Одновременно по полученным сигналам, пропорциональным модулю наклонной скорости сближения с неподвижным ОВ основания антенного устройства вместе с вращающимся по крену подвижным носителем и угловой скорости изменения горизонтального и вертикального углов визирования неподвижного ОВ, формируют сигналы автономного самонаведения подвижного носителя вращающегося по крену на неподвижный ОВ. 2 н.п. ф-лы, 13 ил.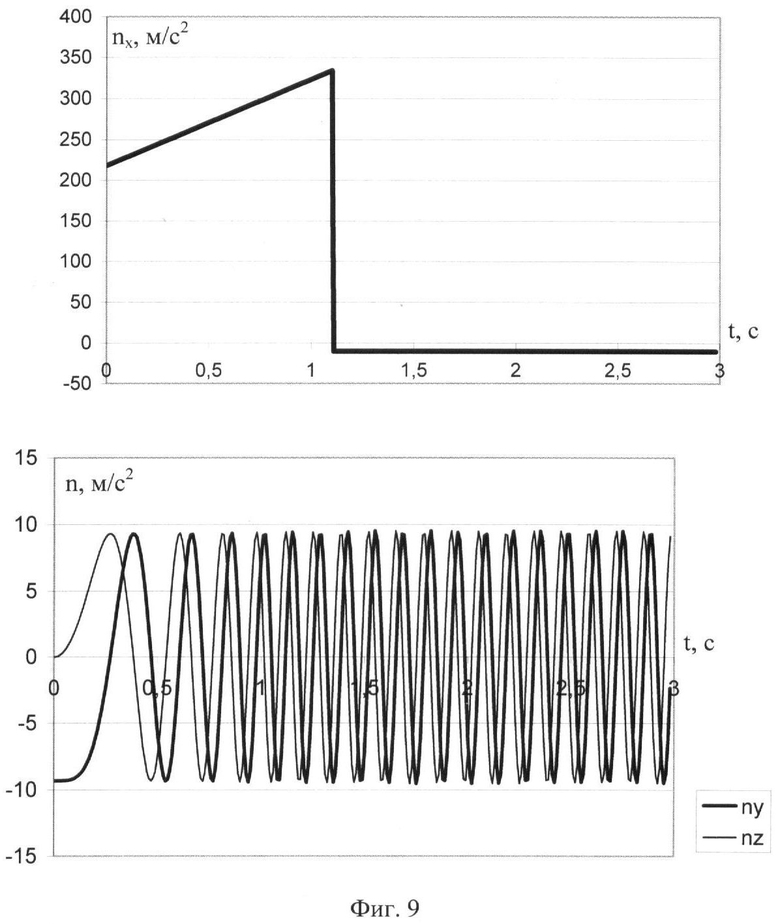
1. Способ формирования сигналов инерциального управления направлением зеркала антенного устройства на неподвижный объект визирования (ОВ) с одновременным формированием сигналов автономного самонаведения подвижного носителя на неподвижный ОВ при круговом вращении основания антенного устройства, установленного жестко внутри корпуса вращающегося по крену подвижного носителя, характеризующийся тем, что формируют длиннопериодические управляющие сигналы, пропорциональные скорости изменения углов визирования, определяющих текущее направление зеркала антенного устройства на неподвижный ОВ в горизонтальной и в вертикальной плоскости, для чего во время предстартовой подготовки подвижного носителя антенного устройства при перемещении после старта вращающегося по крену подвижного носителя по траектории определяют и задают сигналы, пропорциональные начальным координатам взаимного положения подвижного носителя и первоначально назначенного неподвижного ОВ, затем формируют сигналы в виде пакета последовательных информационных слов, содержащего начальные значения угла наклона и азимута назначенного неподвижного ОВ относительно основания антенного устройства в связанной с центром масс подвижного носителя системе координат, наклонной дальности до неподвижного ОВ и наклонной скорости сближения с неподвижным ОВ основания антенного устройства вместе с подвижным носителем в предстартовом его положении, рыскания, тангажа и крена подвижного носителя вместе с основанием антенного устройства, а также начальные условия выставки инерциального измерения параметров вектора визирования неподвижного ОВ, т.е. сигналы, пропорциональные начальным значениям проекции вектора линейной скорости предстартового перемещения основания антенного устройства вместе с подвижным носителем на соответствующие оси местной горизонтальной системы координат, декартовых координат подвижного носителя в местной горизонтальной системе координат, долготы и географической широты подвижного носителя и, кроме того, сигналы, пропорциональные необходимым режимным параметрам по дальности, контрольное слово, командное слово, далее проверяют сформированные сигналы в виде пакета последовательных информационных слов на отсутствие в них искажений, после чего сигналы, характеризующие пакет последовательных информационных слов, преобразуют в параллельную форму для инерциального измерения параметров вектора визирования неподвижного ОВ, затем преобразуют сигналы, пропорциональные заданным начальным условиям выставки инерциального измерения параметров вектора визирования неподвижного ОВ, в сигналы, пропорциональные начальным значениям проекций вектора линейной скорости предстартового перемещения основания антенного устройства вместе с подвижным носителем на соответствующие оси базовой антенной системы координат, углов визирования назначенного неподвижного ОВ соответственно в горизонтальной и в вертикальной плоскости в местной горизонтальной системе координат, составляющих пространственной угловой координаты неподвижного ОВ в базовой антенной системе координат, направляющих косинусов, определяющих начальное взаимное положение базовой антенной системы координат и опорной геоцентрической системы координат, связанной одной своей осью с неподвижным ОВ, расположенным на земной поверхности; в момент времени старта подвижного носителя обновление сигналов начальной информации прекращается, и во время его движения по траектории после старта одновременно измеряют сигналы пропорциональные проекциям вектора кажущегося линейного ускорения движения и проекциям вектора абсолютной угловой скорости поворота зеркала антенного устройства на соответствующие оси системы координат, связанной с зеркалом антенного устройства, по этим измеренным сигналам с учетом переменной электрической редукции между углами поворота линии и/или вектора визирования неподвижного ОВ определяют сигналы, пропорциональные проекциям вектора кажущегося линейного ускорения движения и проекциям вектора абсолютной угловой скорости поворота вектора визирования неподвижного ОВ на соответствующие оси базовой антенной системы координат, формируют по полученным сигналам с учетом сигналов, определенных и заданных во время предстартовой подготовки подвижного носителя, сигналы, пропорциональные текущим значениям параметров вектора визирования неподвижного ОВ, а именно проекций вектора линейной скорости сближения с неподвижным ОВ основания антенного устройства вместе с вращающимся по крену подвижным носителем на соответствующие оси базовой антенной системы координат, наклонной дальности и наклонной скорости сближения с неподвижным ОВ основания антенного устройства вместе с подвижным носителем, вращающимся по крену, составляющих пространственной угловой координаты неподвижного ОВ в базовой антенной системе координат, направляющих косинусов взаимного текущего углового положения базовой антенной системы координат и опорной геоцентрической системы координат, осуществляют по полученным сигналам, пропорциональным текущим значениям наклонной дальности и наклонной скорости сближения с неподвижным ОВ основания антенного устройства вместе с вращающимся по крену подвижным носителем, инерциальное автосопровождение неподвижного ОВ по дальности, а по полученным сигналам, пропорциональным текущим значениям составляющих пространственной угловой координаты неподвижного ОВ в базовой антенной системе координат, которые являются сигналами рассогласования между направлением оптической оси зеркала антенного устройства и направлением на неподвижный ОВ в двух взаимно перпендикулярных плоскостях в базовой антенной системе координат, осуществляют инерциальное автосопровождение по направлению неподвижного ОВ, назначенного при предстартовой подготовке подвижного носителя, для чего преобразуют путем интегрирования в замкнутом контуре инерциального автосопровождения по направлению неподвижного ОВ полученные сигналы, пропорциональные текущим значениям составляющих пространственной угловой координаты неподвижного ОВ, в управляющие длиннопериодические сигналы, пропорциональные соответственно скорости изменения углов визирования неподвижного ОВ, определяющих текущее направление зеркала антенного устройства на неподвижный ОВ в горизонтальной и в вертикальной плоскости, обусловленных перемещением основания антенного устройства вместе с вращающимся по крену подвижным носителем по направлению к неподвижному ОВ, которыми воздействуют на соответствующие датчики момента управляемого трехстепенного гироскопа, установленного во внутренней рамке двухосного карданова подвеса антенного устройства, наружная и внутренняя рамки которого шарнирно связаны с его зеркалом, под действием этих длиннопериодических сигналов создают длиннопериодические возмущающие управляющие моменты, вызывающие моменты гироскопической реакции в опорах осей прецессии соответствующих рамок трехосного карданова подвеса ротора гироскопа, при этом возникает длиннопериодическое прецессионное отклонение соответствующих рамок трехосного карданова подвеса ротора гироскопа с угловой скоростью, близкой по величине к угловой скорости изменения соответствующих углов визирования неподвижного ОВ, одновременно определяют сигналы, пропорциональные рассогласованию между направлением кинетического момента ротора гироскопа и направлением на неподвижный ОВ, задаваемым сформированными длиннопериодическими сигналами, пропорциональными скорости изменения углов визирования неподвижного ОВ в горизонтальной и в вертикальной плоскости и соответственно длиннопериодическим возмущающим управляющим моментам; эти сигналы преобразуют в длиннопериодические сигналы управления электродвигателями вращения рамок двухосного карданова подвеса антенного устройства, а по сигналам управления электродвигатели развивают длиннопериодические вращающие моменты, равные и совпадающие по направлению с направлением соответствующих длиннопериодических возмущающих управляющих моментов, для поворота наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала в текущее направление на неподвижные ОВ; при этом одновременно определяют сигналы, пропорциональные соответственно углу наклона и азимуту неподвижного ОВ относительно основания антенного устройства; при этом также одновременно формируют сигналы, пропорциональные амплитуде и частоте короткопериодических колебаний, сдвинутых по фазе на 90°, наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала относительно своих осей вращения, и короткопериодические сигналы, пропорциональные колебаниям основания антенного устройства вместе с колебаниями подвижного носителя по рысканию и по тангажу, которые воздействуют на основание антенного устройства при одновременном его вращении по крену вместе с подвижным носителем, вызывающие аддитивные короткопериодические возмущающие моменты, которые, в свою очередь, вызывают короткопериодические моменты гироскопической реакции в опорах осей прецессии соответствующих рамок карданова подвеса ротора гироскопа, при этом возникает короткопериодическое прецессионное колебание соответствующих рамок карданова подвеса ротора гироскопа с угловыми скоростями, направление вектора которых совпадает с направлением векторов аддитивных короткопериодических возмущающих моментов, одновременно определяют сигналы, пропорциональные рассогласованию между направлением кинетического момента ротора гироскопа и направлением вектора аддитивных короткопериодических возмущающих моментов, эти сигналы преобразуют в аддитивные короткопериодические сигналы управления соответствующих электродвигателей вращения рамок двухосного карданова подвеса антенного устройства, по сигналам управления электродвигатели развивают аддитивные короткопериодические вращающие моменты, равные и противоположно направленные соответственно направлению аддитивных короткопериодических возмущающих моментов, действующих вокруг соответствующих осей вращения наружной и внутренней рамок двухосного карданова подвеса антенного устройства, для отработки аддитивных короткопериодических сигналов, обусловленных вращением основания антенного устройства вместе с вращающимся по крену подвижным носителем и колебаниями их по рысканию и по тангажу, в текущем направлении на неподвижный ОВ, при этом по сформированным длиннопериодическим управляющим сигналам, пропорциональным скорости изменения углов визирования неподвижного ОВ, определяющих текущее стабилизированное от аддитивных короткопериодических колебаний направление зеркала антенного устройства на неподвижный ОВ в горизонтальной и в вертикальной плоскости, осуществляют инерциальное управление стабилизированным направлением зеркала антенного устройства на неподвижный ОВ при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем, одновременно по полученным сигналам, пропорциональным текущим значениям модуля скорости изменения наклонной дальности сближения с неподвижным ОВ основания антенного устройства вместе с вращающимся по крену подвижным носителем, и скорости изменения углов визирования неподвижного ОВ соответственно в горизонтальной и в вертикальной плоскости формируют управляющие сигналы автономного самонаведения вращающегося по крену подвижного носителя вместе с основанием антенного устройства на неподвижный ОВ, пропорциональные, например, задаваемым перегрузкам соответственно в горизонтальной и в вертикальной плоскости, полученные управляющие сигналы автономного самонаведения преобразуют в электрические сигналы, усиливают затем их по мощности и подают во внешнюю аппаратуру управления электроприводами рулей подвижного носителя.
2. Система, осуществляющая способ по п.1, характеризующаяся тем, что содержит антенное устройство, узел инерциального измерения параметров вектора визирования неподвижного ОВ, узел преобразования сигналов начального назначения угла наклона и азимута неподвижного ОВ, узел инерциального автосопровождения неподвижного ОВ по углу наклона, узел инерциального автосопровождения неподвижного ОВ по азимуту, узел инерциального автосопровождения неподвижного ОВ по дальности, узел гиростабилизации и управления направлением зеркала антенного устройства на неподвижный ОВ по углу наклона, узел гибилизации и управления направлением зеркала антенного устройства на неподвижный ОВ по азимуту, узел формирования сигналов учета переменной электрической редукции, узел преобразования выходных сигналов гироскопического датчика угловой скорости и входного сигнала датчика момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа, узел преобразования выходных сигналов акселерометров, узел преобразования сигналов составляющих пространственной угловой координаты неподвижного ОВ, узел преобразования входных сигналов датчиков момента управления направлением поворота наружной и внутренней рамок трехосного карданова подвеса ротора гироскопа, узел преобразования сигналов датчиков угла поворота рамок двухосного карданова подвеса антенного устройства, узел формирования сигналов стабилизации и автономного самонаведения подвижного носителя на неподвижный ОВ, при этом антенное устройство включает в свой состав зеркало с облучателем, двухосный карданов подвес, ось вращения наружной рамки которого установлена на основании антенного устройства, а ось вращения внутренней рамки установлена в наружной рамке перпендикулярно к оси вращения внутренней рамки, электродвигатель поворота наружной рамки двухосного карданова подвеса и электродвигатель поворота внутренней рамки двухосного карданова подвеса, датчик угла поворота наружной рамки карданова подвеса и датчик угла поворота внутренней рамки карданова подвеса соответственно по углу наклона и по азимуту, а также управляемый трехстепенной гироскоп, двухканальный гироскопический датчик угловой скорости (ДУС), три однокомпонентных измерителя линейного ускорения, при этом управляемый трехстепенной гироскоп установлен во внутренней рамке двухосного карданова подвеса антенного устройства так, что направление кинетического момента его ротора в заарретированном положении гироскопа совпадает с нулевым направлением линии визирования антенного устройства, гироскоп содержит трехосный карданов подвес ротора гироскопа, датчик угла прецессии внутренней рамки и датчик угла прецессии наружной рамки трехосного карданова подвеса ротора гироскопа, датчик момента управления направлением поворота внутренней рамки трехосного карданова подвеса ротора гироскопа, датчик момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа, при этом ось собственного вращения ротора гироскопа установлена во внутренней рамке трехосного карданова подвеса ротора гироскопа, ось вращения которой установлена в наружной рамке трехосного карданова подвеса ротора гироскопа, ось вращения которой, в свою очередь, установлена в корпусе гироскопа, а корпус гироскопа жестко закреплен во внутренней рамке двухосного карданова подвеса антенного устройства, на соответствующих осях вращения рамок карданова подвеса ротора гироскопа установлены соответственно датчики угла прецессии внутренней и наружной рамки трехосного карданова подвеса ротора гироскопа, выходы которых соответственно соединены с входами узлов гиростабилизации и управления направлением зеркала антенного устройства на неподвижный ОВ по углу наклона и по азимуту, выходы которых, в свою очередь, соединены соответственно с электродвигателями поворота наружной и внутренней рамок двухосного карданова подвеса антенного устройства, двухканальный гироскопический ДУС установлен во внутренней рамке двухосного карданова подвеса антенного устройства так, что в заарретированном положении одна из его осей чувствительности совпадает с нулевым направлением линии визирования антенного устройства, а другая его ось чувствительности ориентирована, например, вверх вдоль положительного направления оси вращения внутренней рамки двухосного карданова подвеса антенного устройства, при этом направление кинетического момента ротора гироскопа ДУС совпадает с положительным направлением оси вращения наружной рамки двухосного карданова подвеса антенного устройства, все три однокомпонентных измерителя линейного ускорения установлены во внутренней рамке двухосного карданова подвеса антенного устройства так, что ось чувствительности одного их них взаимно ортогональна по отношению к взаимно ортогональным осям чувствительности двух других однокомпонентных измерителей линейного ускорения, при этом ось чувствительности одного из трех однокомпонентных измерителей линейного ускорения совпадает в заарретированном положении с нулевым положением линии визирования антенного устройства, зеркало антенного устройства выполнено с возможностью поворота в двух взаимно перпендикулярных плоскостях с помощью двухстепенного шарнира относительно центра излучения облучателя, жестко закрепленного на основании антенного устройства, при этом зеркало шарнирно соединено жесткими тягами соответственно с наружной и с внутренней рамкой двухосного карданова подвеса антенного устройства так, что расстояние между каждым из шарниров жестких тяг на задней поверхности зеркала и его центром вращения равно расстоянию между каждым из шарниров, установленных соответственно на наружной рамке и на внутренней рамке двухосного карданова подвеса антенного устройства, и центром вращения этих рамок, причем выходы трех однокомпонентных измерителей линейного ускорения соединены соответственно с первым, вторым и третьим входами узла преобразования сигналов акселерометров, выходы первый, второй и третий которого соединены соответственно с первым, вторым и третьим входами узла инерциального измерения параметров вектора визирования неподвижного ОВ, выходы двухканального гироскопического ДУС и вход датчика момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа соединены соответственно с первым, вторым и третьим входами узла преобразования выходных сигналов гироскопического ДУС и входного сигнала датчика момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа, при этом вход каждого из датчиков момента внутренней рамки и наружной рамки трехосного карданова подвеса ротора гироскопического ДУС соединен с выходами соответствующих усилителей сигнала обратной связи, входы которых соединены с соответствующими выходами датчиков угла прецессии внутренней и наружной рамки гироскопического ДУС, кроме того, информационная линия связи, по которой поступает информационный массив сигналов предстартового начального назначения неподвижного ОВ и начальной выставки инерциального измерения параметров вектора визирования ОВ, соединена с информационным входом узла инерциального измерения параметров вектора визирования неподвижного ОВ, а выход датчика угла поворота наружной рамки и выход датчика угла поворота внутренней рамки двухосного карданова подвеса антенного устройства соответственно по углу наклона и по азимуту соединены с первым входом узла инерциального автосопровождения неподвижного ОВ по углу наклона и со вторым входом узла инерциального автосопровождения неподвижного ОВ по азимуту, а также соединены с первым и со вторым входом узла преобразования сигналов датчиков угла поворота рамок двухосного карданова подвеса антенного устройства и с первым и со вторым входом узла формирования сигналов учета переменной электрической редукции между углами поворота направления зеркала антенного устройства и направления линии визирования неподвижного ОВ антенного устройства, причем первый выход узла инерциального автосопровождения неподвижного ОВ по углу наклона и первый выход узла инерциального автосопровождения неподвижного ОВ по азимуту соединены соответственно с датчиками момента управления направлением поворота наружной и внутренней рамками трехосного карданова подвеса ротора гироскопа, а также с первым и вторым входами узла преобразования входных сигналов датчиков момента управления направлением поворота наружной и внутренней рамок трехосного карданова подвеса ротора гироскопа, при этом первый и второй выходы узла преобразования сигналов датчиков угла поворота рамок по углу наклона и по азимуту двухосного карданова подвеса антенного устройства соединены соответственно с третьим и с четвертым входами узла формирования сигналов учета переменной электрической редукции, а также соединены соответственно с пятым и шестым входами узла формирования сигналов стабилизации и автономного самонаведения подвижного носителя на неподвижный ОВ, при этом первый и второй выходы узла формирования сигналов учета переменной электрической редукции соединены соответственно с четвертым и пятым входами узла преобразования сигналов акселерометров, с четвертым и пятым входами узла преобразования выходных сигналов гироскопического ДУС и входного сигнала датчика момента управления направлением поворота наружной рамки карданова подвеса ротора гироскопа, первый и второй выходы узла инерциального измерения параметров вектора визирования неподвижного ОВ соответственно соединены со вторым и первым входами узла преобразования сигналов составляющих пространственной угловой координаты неподвижного ОВ, причем первый и второй выходы узла преобразования сигналов составляющих пространственной угловой координаты неподвижного ОВ соединены соответственно со вторым входом узла инерциального автосопросождения неподвижного ОВ по углу наклона и с первым входом узла инерциального автосопровождения неподвижного ОВ по азимуту, при этом третий и четвертый выходы узла инерциального измерения параметров вектора визирования неподвижного ОВ соединены соответственно с первым и вторым входами узла инерциального автосопровождения неподвижного ОВ по дальности, первый и второй выходы которого соединены соответственно с третьим и четвертым входами узла формирования сигналов стабилизации и автономного самонаведения подвижного носителя на неподвижный OB, a пятый и шестой выходы узла инерциального измерения параметров вектора визирования неподвижного ОВ соединены соответственно с первым и вторым входами узла преобразования сигналов начального назначения угла наклона и азимута непосредственно ОВ, первый и второй выходы которого соединены соответственно с третьим входом узла инерциального автосопровождения неподвижного ОВ по углу наклона и с третьим входом узла инерциального автосопровождения неподвижного ОВ по азимуту, информационная линия связи, по которой поступает информационный массив сигналов стабилизации и автономного самонаведения подвижного носителя, соединена с входом аппаратуры управления рулями вращающегося по крену подвижного носителя антенного устройства, которая является внешней по отношению к предлагаемой системе.
| СИСТЕМА СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ЛИНИЕЙ ВИЗИРОВАНИЯ АНТЕННЫ | 2004 |
|
RU2282230C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПО КРЕНУ ИНЕРЦИАЛЬНОЙ ПЛАТФОРМЫ ДЛЯ БЫСТРОВРАЩАЮЩИХСЯ ОБЪЕКТОВ И СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ ИНЕРЦИАЛЬНАЯ ПЛАТФОРМА | 2003 |
|
RU2256882C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1996 |
|
RU2104578C1 |
| US 5922039 A, 13.07.1999 | |||
| US 6529161 B2, 08.08.2002 | |||
| JP 3232378 В2, 08.07.1994 | |||
| RU 2058530 C1, 20.04.1996 | |||
| СПОСОБ ПРЕДСТАРТОВОЙ ВЫСТАВКИ ВЫСОКОТОЧНЫХ РАКЕТ | 1995 |
|
RU2150124C1 |

