1 Область техники, к которой относится изобретение
Изобретение относится к гироскопической технике и может быть использовано для измерения абсолютной угловой скорости подвижных объектов - самолетов, ракет, морских судов.
Одной из важнейших задач, решаемых системами управления подвижными объектами, является измерение их абсолютной угловой скорости. Для этого используются измерители угловой скорости (ИУС) на базе динамически настраиваемых гироскопов (ДНГ). Совершенствование систем управления ставит перед разработчиками ДНГ цель: повышение точности измерения абсолютной угловой скорости, увеличение диапазона измеряемых угловых скоростей, сокращение времени готовности, увеличение межрегламентного периода.
2 Уровень техники
Рассмотрим аналоги предлагаемого изобретения.
2.1 Библиографические данные аналогов изобретения
[1] Гироскопические системы, ч. 2 под редакцией Д.С. Пельпора. М.: Высшая школа, 1988, стр. 147-169.
[2] G01C 19/02. Гироскоп. Патент RU 2298151. Авторы Баженов В.И., Будкин В.Л., Виноградов Г.М., Темляков Н.А., Фурман Е.В., Ягупова Е.И.
[3] В.Э. Джашитов, В.М. Панкратов. Датчики, приборы и системы авиакосмического и морского приборостроения в условиях тепловых воздействий. Под общ. ред. академика РАН В.Г. Пешехонова. - СПб.:ГНЦ РФ ЦНИИ «Электроприбор», 2005, стр. 122.
[4] G01P 15/13. Акселерометр компенсационного типа. Патент RU 2434233. Авторы Рязанов А.А., Козлов И.Ю., Гусев А.Н., Чемоданов А.Ю.
[5] G01C 19/02. Устройство и способ измерения абсолютной угловой скорости. Патент RU 2621642. Авторы Губко В.П., Киляков А.Н.
[6] G01C 19/22. Pick off, torquer, and reference signal generator for free rotor gyroscopes. Патент США №4487083. Авторы Thomas R. Quermann, Suffolk, N.Y.
2.2 Известны динамически настраиваемые гироскопы [1], применяемые в измерителях абсолютной угловой скорости. Общими признаками с заявляемым устройством являются двигатель, вал, упругий подвес, магнитоэлектрический датчик момента (ДМ). Недостатком данного устройства является наличие погрешности масштабного коэффициента, вызванной изменением коэффициента передачи ДМ при изменении температуры окружающей среды. Основная доля этой погрешности обусловлена изменением характеристик постоянных магнитов, входящих с конструкцию ДМ, при изменении температуры. Для уменьшения данной погрешности применяют термостатирование ДНГ при помощи нагревателей, расположенных на наружной поверхности корпуса прибора [2]. Недостатком данного технического решения является длительное время готовности прибора. Для сокращения времени готовности применяют алгоритмическую компенсацию температурной погрешности масштабного коэффициента по показаниям термодатчиков, встроенных во внутреннюю полость прибора [3], [4]. Недостатком таких устройств является погрешность, обусловленная отличием температуры термодатчиков от температуры магнита магнитоэлектрического датчика вследствие наличия температурных градиентов во внутренней полости прибора в переходных тепловых режимах работы, а также погрешность, обусловленная старением магнитов - изменением их коэрцитивной силы в течение срока службы прибора, что вызывает необходимость проведения регулярных регламентных проверок для уточнения коэффициентов математической модели температурной зависимости масштабного коэффициента. Для точной компенсации погрешности масштабного коэффициента необходим сигнал, амплитуда которого была бы прямо пропорциональна индукции в рабочем зазоре магнитоэлектрического датчика момента (ДМ) ДНГ. Получить такую информацию можно с помощью дополнительной сигнальной (генераторной) обмотки, помещенной в рабочий зазор магнитной системы ДМ. Дополнительные сигнальные обмотки имеются в устройстве по патенту [5], однако данные обмотки в представленной схеме включения выполняют функции датчика угла (ДУ), т.е. сигнал с обмоток прямо пропорционален углу отклонения ротора от нулевого положения и при работе ДНГ в режиме электрической пружины близок к нулю, поэтому не может быть использован для индикации изменений магнитной индукции в рабочем зазоре датчика момента.
Наиболее близким к заявляемому изобретению аналогом (прототипом) является устройство по патенту США №4487083 [6]. Общими признаками с предлагаемым изобретением являются: корпус, приводной вал, расположенный в корпусе на шарикоподшипниках, ротор, вращающийся вокруг оси вращения вала, упругий подвес, передающий вращение от вала к ротору и обеспечивающий ему две угловые степени свободы относительно вала, кольцевой постоянный магнит, установленный на роторе и намагниченный в радиальном направлении, обеспечивающий в кольцевом канале между магнитом и ротором магнитную индукцию, регулярно изменяющуюся от минимальной до максимальной величины несколько раз за один оборот ротора, катушки, образующие статор двухкоординатного датчика угла, момента и генератора опорного сигнала, установленный на корпусе и вставленный в кольцевой канал ротора, а также двигатель, состоящий из ротора и статора.
Данный прототип имеет следующие недостатки.
А. Создание изменяющейся магнитной индукции в кольцевом канале ротора в прототипе осуществляется путем неравномерного намагничивания кольцевого магнита, т.е. намагниченные участки в нем чередуются с не намагниченными. Это приводит к снижению средней магнитной индукции в рабочем зазоре ДМ и уменьшению диапазона измеряемых угловых скоростей.
Б. Имеющиеся в прототипе катушки генератора опорного сигнала не представляется возможным использовать для определения изменений магнитной индукции в рабочем зазоре датчика момента в силу влияния на амплитуду выходного сигнала генератора взаимного положения ротора и статора. Данная зависимость обусловлена тем, что в прототипе катушки генератора лишь частично погружены в магнитное поле ротора, а от глубины погружения зависит амплитуда ЭДС, индуцируемой в этих катушках. Изменение глубины погружения катушек может возникать при изменении температуры прибора, наличии температурных градиентов в конструкции, релаксации конструкции в течение срока службы. Так перемещение ротора относительно статора в осевом направлении на 0,001 мм приведет к изменению амплитуды выходного сигнала генератора на 0,05%, что недопустимо для создания высокоточного измерителя абсолютной угловой скорости.
3 Раскрытие изобретения
3.1 Техническим результатом предлагаемого изобретения является повышение точности измерения абсолютной угловой скорости, увеличение диапазона измеряемых угловых скоростей.
Технический результат достигается совокупностью существенных признаков:
- выполнением магнитов датчика угла и момента (ДУМ) в виде двух колец, равномерно намагниченных в радиальном направлении и имеющих на торцах специальные пазы;
- расположением рабочих ветвей катушек ДМ над монолитной зоной кольцевых магнитов, а рабочих ветвей катушек ДУ - над зоной пазов в магнитах;
- введением в статор ДУМ специальных катушек, полностью погруженных в магнитное поле ротора, в которых генерируется ЭДС, прямо пропорциональная магнитной индукции в рабочем зазоре ДУМ.
Сущность изобретения заключается в том, что создание модуляции магнитного поля в рабочем зазоре ДУМ при помощи специальных пазов на торцах двух кольцевых магнитов и введение в конструкцию статора ДМ специальных катушек позволяет с высокой точностью осуществить компенсацию погрешности масштабного коэффициента измерителя абсолютной угловой скорости, увеличить диапазон измеряемых угловых скоростей.
3.2 Заявляемое изобретение направлено на решение следующих задач:
- увеличение магнитной индукции в зоне расположения рабочих ветвей катушек ДМ;
- создание генератора сигнала, амплитуда которого прямо пропорциональна магнитной индукции в рабочем зазоре датчика момента в данный момент времени и не зависит от взаимного положения ротора и статора.
Для решения 1-й задачи кольцевые магниты ДУМ равномерно намагничены по длине окружности, а на их торцах выполнены специальные пазы, рабочие ветви катушек ДМ располагаются над монолитной частью кольцевых магнитов (в зоне равномерного магнитного поля), а катушки ДУ -над пазами (в зоне переменного по окружности рабочего зазора магнитного поля). Для решения 2-й задачи в статор ДУМ введены специальные катушки, работающие в зоне переменного по окружности рабочего зазора магнитного поля, создаваемого пазами в магнитах. Решение этих задач обеспечивает повышение точности измерения абсолютной угловой скорости, увеличение диапазона измеряемых угловых скоростей, сокращение времени готовности, увеличение межрегламентного периода.
3.3 Существенные признаки, характеризующие предлагаемое изобретение и общие с прототипом [6]: корпус, вал, двигатель, шарикоподшипники, упругий подвес, ротор и статор магнитоэлектрического датчика угла и момента, в рабочем зазоре которого создается переменное по окружности рабочего зазора магнитное поле. Существенные признаки, характеризующие предлагаемое изобретение и отличающиеся от прототипа: пазы на торцах двух кольцевых магнитов ротора ДУМ, наличие генераторных катушек на статоре ДУМ, полностью погруженных в магнитное поле двух кольцевых магнитов.
4 Краткое описание чертежей
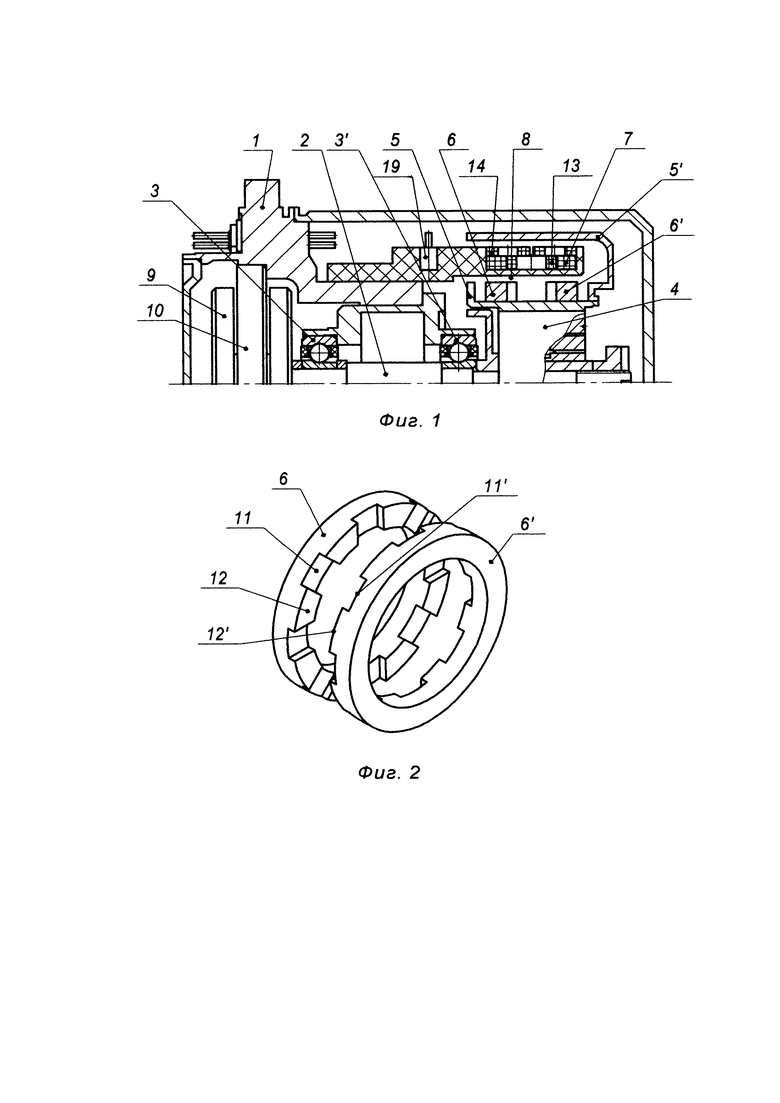
На фиг. 1 представлена конструкция заявляемого устройства.
На фиг. 2 в изометрической проекции показаны кольцевые магниты с пазами, обеспечивающими модуляцию магнитного поля в рабочем зазоре ДУМ.
На фиг. 3 показаны катушки датчика момента и датчика угла в изометрической проекции (соединения проводников не показаны).
На фиг. 4 показаны катушки генератора сигнала в изометрической проекции (соединения проводников не показаны).
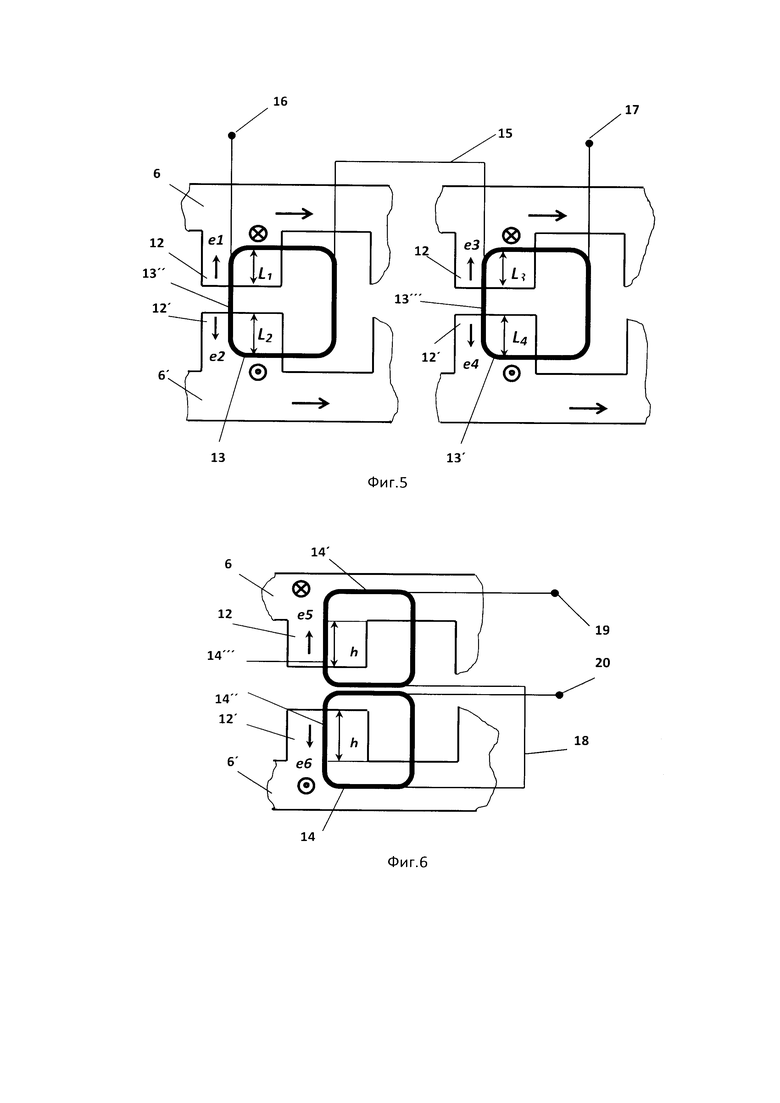
На фиг. 5 показана схема, поясняющая формирование сигнала ДУ.
На фиг. 6 показана схема, поясняющая формирование сигнала в генераторных катушках.
5 Осуществление изобретения
5.1 Как и в прототипе, предлагаемый динамически настраиваемый гироскоп содержит корпус 1 (фиг. 1), вал 2, подшипники 3 и 3', упругий подвес 4, установленный на него ротор 5 из магнитномягкого сплава с высокой индукцией насыщения, кольцевой магнит из магнитнотвердого сплава с радиальной намагниченностью от центра к периферии 6, четыре катушки прямоугольной формы 7 (на фиг. 1 показана одна из них) двухкоординатного датчика момента, помещенные в рабочий зазор 8 между кольцевым магнитом и наружной частью ротора 5', двигатель, состоящий из ротора 9 и статора 10.
В отличие от прототипа, в конструкцию введен еще один кольцевой магнит 6', причем полярность его намагничивания противоположна магниту 6 (подобно описанному в аналоге [2]). В отличие от прототипа и аналога, на торцах магнитов, обращенных друг к другу, выполнены восемь одинаковых пазов 11 и 11' (фиг. 2), причем пазы одного магнита находятся напротив пазов другого магнита, как соответственно и выступы 12 и 12'. Рабочие ветви прямоугольных катушек ДМ 7' (фиг. 3), протекание тока в которых создает управляющий момент, расположены над сплошной частью магнитов, прямоугольные катушки ДУ 13 (12 одинаковых катушек на фиг. 3) расположены над выступами магнитов. Для эффективной работы ДУ, угловой размер Т катушек, как и в прототипе, рассчитывается по формуле:
где S - угол между центрами выступов на кольцевых магнитах, n - положительное число, но не ноль. В описываемой конструкции n=1 и T-S/2. Поверх слоя катушек ДМ и ДУ располагаются специальные генераторные катушки 14 прямоугольной формы (16 одинаковых катушек на фиг. 4). Катушки располагаются парами в два ряда, соединяются между собой последовательно, в каждой паре катушки включены встречно, т.е. имеют противоположное направление намотки. Оси двух рядов катушек расположены в плоскости над пазами в соответствующих кольцевых магнитах. Для эффективной работы, угловой размер прямоугольных генераторных катушек также равен S/2.
5.2 Работа гироскопа происходит следующим образом.
Вал 2 приводится во вращение двигателем, имеющим ротор 9 и статор 10, с частотой, соответствующей рабочей частоте вращения ƒp. При разворотах гироскопа в инерциальном пространстве относительно осей, не совпадающих с осью вращения вала, происходит угловое рассогласование ротора 5 относительно корпуса 1, что приводит к возникновению сигналов в катушках ДУ 13, амплитуда которых пропорциональна углам рассогласования, а частота равна k⋅ƒP, где k - количество пазов на каждом кольцевом магните. Формирование сигнала об отклонении ротора в предлагаемом устройстве аналогично прототипу [6] и применительно к магнитной системе, состоящей из двух кольцевых магнитов с пазами, происходит следующим образом.
При вращении ротора, в момент прохождения выступов 12 и 12' (фиг. 5 -развертка цилиндрической поверхности на плоскость) под активными ветвями катушек 13 и 13' (на фиг. 5 активные ветви катушек обозначены 13'' и 13''') в них индуцируется ЭДС, направление которой определяется правилом правой руки, а величина - длиной участка активной части, находящейся над магнитом. Для простоты на фиг. 5 показаны 2 катушки, расположенные диаметрально друг относительно друга и участвующие в формировании сигнала об отклонении ротора вокруг одной из осей чувствительности. Направление вектора индукции магнитного поля магнита 6 показана в сторону от наблюдателя значком  , а магнита 6' - условно на наблюдателя значком
, а магнита 6' - условно на наблюдателя значком  , направление движения магнита при вращении ротора относительно катушек показано стрелками
, направление движения магнита при вращении ротора относительно катушек показано стрелками  . При отсутствии абсолютной угловой скорости корпуса ДНГ ротор находится в неотклоненном состоянии относительно катушек 13 и 13', поэтому длины участков активной части катушек, находящихся над магнитом равны между собой, L1=L2=L3=L4=L. ЭДС, индуцируемая в этих участках, по абсолютной величине также равна, e1=е2=е3=е4=е (показана на фиг. 5 стрелками). Поскольку в каждой катушке ЭДС направлены встречно, в неотклоненном положении ротора суммарная ЭДС на выводных клеммах 16 и 17 равна нулю. При отклонении ротора от нулевого положения вследствие действия на прибор абсолютной угловой скорости, длины участков активной части катушек, находящихся над магнитом, изменяются на некоторую величину ΔL и становятся равными: L1=L+ΔL; L2=L-ΔL; L3=L-ΔL; L4=L+ΔL. Соответственно на величину Δe изменяется ЭДС, индуцируемая в этих участках: е1=е+Δе; е2=е-Δе; е3=е-Δе; е4=е+Δе. Поскольку ЭДС е1 и е2 направлены встречно, в результате в первой катушке образуется ЭДС амплитудой 2Δе. Аналогично во второй катушке индуцируется такая же ЭДС. Поскольку катушки соединены между собой перемычкой 15, на выводных клеммах ДУ 16 и 17 возникает напряжение амплитудой 4Δе.
. При отсутствии абсолютной угловой скорости корпуса ДНГ ротор находится в неотклоненном состоянии относительно катушек 13 и 13', поэтому длины участков активной части катушек, находящихся над магнитом равны между собой, L1=L2=L3=L4=L. ЭДС, индуцируемая в этих участках, по абсолютной величине также равна, e1=е2=е3=е4=е (показана на фиг. 5 стрелками). Поскольку в каждой катушке ЭДС направлены встречно, в неотклоненном положении ротора суммарная ЭДС на выводных клеммах 16 и 17 равна нулю. При отклонении ротора от нулевого положения вследствие действия на прибор абсолютной угловой скорости, длины участков активной части катушек, находящихся над магнитом, изменяются на некоторую величину ΔL и становятся равными: L1=L+ΔL; L2=L-ΔL; L3=L-ΔL; L4=L+ΔL. Соответственно на величину Δe изменяется ЭДС, индуцируемая в этих участках: е1=е+Δе; е2=е-Δе; е3=е-Δе; е4=е+Δе. Поскольку ЭДС е1 и е2 направлены встречно, в результате в первой катушке образуется ЭДС амплитудой 2Δе. Аналогично во второй катушке индуцируется такая же ЭДС. Поскольку катушки соединены между собой перемычкой 15, на выводных клеммах ДУ 16 и 17 возникает напряжение амплитудой 4Δе.
В следующий момент времени, когда выступы становятся под правыми (на фиг. 5) активными ветвями катушек 13 и 13', образование ЭДС в катушках повторяется с той разницей, что ее направление меняется на противоположное. Таким образом, на выводных клеммах ДУ возникает переменное напряжение амплитудой 4Δе и частотой k⋅ƒP, где k - число пазов на магнитах. После усиления и преобразования (преобразователь не показан) сигнал в виде тока подается в катушки датчика момента 7, образуя, тем самым, замкнутый контур компенсационной системы измерения. Протекание тока в рабочих ветвях 7' катушек ДМ, расположенных в магнитном поле над сплошной частью кольцевых магнитов, создает момент соответствующего знака и величины, приводящий к нулю угол рассогласования между ротором и корпусом. Ток в катушках ДМ является мерой абсолютной угловой скорости, действующей на прибор. Поскольку рабочие ветви катушек ДМ расположены в магнитном поле над сплошной частью кольцевых магнитов, это, в отличие от прототипа, способствует увеличению диапазона угловых скоростей, измеряемых данным прибором.
Вращение ротора с угловой скоростью 2πƒР индуцирует в генераторных катушках 14, 14' ЭДС, амплитуда которой прямо пропорциональна магнитной индукции в рабочем зазоре датчика момента. Происходит это следующим образом. В момент времени, когда активные ветви 14'' и 14''' (фиг. 6) генераторных катушек находятся над выступами кольцевых магнитов 12 и 12', в них индуцируется ЭДС

где е5, е6 - ЭДС, индуцируемые в активных ветвях генераторных катушек в момент прохождения под ними выступов на кольцевых магнитах;
В - индукция магнитного поля над выступами кольцевого магнита;
S - длина проводника;
ν - скорость движения проводника относительно магнитного поля;
m - число витков в каждой катушке;
h - длина активной части ветви генераторной катушки, находящейся в зоне переменного магнитного поля над пазами в магнитах, и равная глубине этих пазов;
R - радиус, на котором располагаются генераторные катушки.
Поскольку катушки 14 и 14' соединены перемычкой 18 последовательно встречно, ЭДС на выводных клеммах 19 и 20 удвоится и будет равна 2е5. В следующий момент времени, когда выступы будут находиться под правыми (на фиг. 6) активными ветвями катушек 14 и 14', на выводных клеммах 19 и 20 будет индуцирована ЭДС противоположного знака. Таким образом, на выводных клеммах одной пары генераторных катушек будет индуцировано переменное напряжение с частотой k⋅ƒP и амплитудой 2е5. При последовательном соединении пар генераторных катушек амплитуда напряжения возрастет в соответствующее число раз и может достичь U=1В и более. Как видно из фиг. 6 и формулы (2), амплитуда этого напряжения инвариантна к перемещениям катушек относительно ротора, т.к. при малых перемещениях длина активной части ветви генераторной катушки, находящейся в переменном магнитном поле, не изменится и будет всегда равна h - глубине пазов в магнитах. Поэтому амплитуда напряжения на выводных клеммах генераторных катушек гироскопа определяется только индукцией В магнитного поля в рабочем зазоре датчика момента (изменением глубины пазов h вследствие теплового расширения магнита можно пренебречь, т.к в относительных единицах оно на два порядка меньше, чем соответствующее изменение индукции).
Электронное устройство (не приводится на чертежах) измерителя абсолютной угловой скорости (ИУС) измеряет ток в катушках ДМ и напряжение на выводных клеммах генераторных катушек, формирует информацию об абсолютной угловой скорости по формуле:

где N - выходная информация ИУС;
k0 - масштабирующий коэффициент электронного блока ИУС по току в катушках ДМ, определяемый и паспортизуемый при калибровке;
IДМ - ток, протекающий в катушках ДМ при воздействии абсолютной угловой скорости в текущий момент времени;
U - напряжение на выводных клеммах генераторных катушек в текущий момент времени;
U0 - напряжение на выводных клеммах генераторных катушек, измеренное и паспортизованное при калибровке ИУС.
5.3 Покажем, что использование напряжения, индуцированного в генераторных катушках, делает ИУС на базе предлагаемого ДНГ инвариантным к изменению коэффициента передачи ДМ, обусловленного изменением температуры окружающей среды и старением магнитов.
Формируемый компенсационной системой измерения ток IДМ прямо пропорционален абсолютной угловой скорости основания, на котором установлен ДНГ, и зависит от коэффициента передачи ДМ:
где Н - кинетический момент ДНГ;
kДМ - коэффициента передачи ДМ;
ωα - измеряемая абсолютная угловая скорость.
Изменение температуры окружающей среды и старение магнитов приведет к изменению индукции в рабочем зазоре ДМ и изменению коэффициента передачи ДМ:

где kДМ0 - коэффициент передачи ДМ при калибровке ИУС на этапе его изготовления;
В0 - индукция в рабочем зазоре ДМ при калибровке ИУС;
ΔВ - изменение индукции в рабочем зазоре ДМ при эксплуатации ИУС вследствие изменения температуры окружающей среды и старения магнитов.
В соответствии с формулой (2), напряжение на выводных клеммах генераторных катушек прямо пропорционально индукции в рабочем зазоре ДМ, поэтому, при изменении индукции оно, по сравнению с измеренным при калибровке ИУС, будет:
Подставляя (5) в (4), (4) и (6) в (3) получаем:

Формула (7) показывает, что использование напряжения на выводных клеммах генераторных катушек при вычислении абсолютной угловой скорости ИУС на базе предлагаемого ДНГ исключает ошибку, обусловленную изменением коэффициента передачи ДМ вследствие изменения температуры окружающей среды и старения магнитов.
Таким образом, введение в конструкцию датчика угла и момента ДНГ двух кольцевых магнитов радиальной намагниченности с пазами на торцах, специальных генераторных катушек и расположение рабочих ветвей ДМ над сплошной частью кольцевых магнитов увеличивает диапазон измеряемых угловых скоростей, повышает точность измерения абсолютной угловой скорости в условиях меняющейся температуры окружающей среды, увеличивает срок между регламентными проверками измерителя абсолютной угловой скорости на базе предлагаемого ДНГ.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2017 |
|
RU2653155C1 |
| МАГНИТНАЯ СИСТЕМА ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 2012 |
|
RU2505784C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2302692C9 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437203C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С КОМБИНИРОВАННЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2390086C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416861C1 |
| РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОЛЮСНЫМ ЗУБЧАТЫМ ИНДУКТОРОМ | 2011 |
|
RU2478250C1 |

Изобретение относится к гироскопической технике и может быть использовано для измерения абсолютной угловой скорости подвижных объектов. Сущность изобретения заключается в том, что динамически настраиваемый гироскоп содержит магниты, при этом на торцах магнитов, обращенных друг к другу, выполнены пазы, стороны катушек датчика момента, протекание тока в которых создает управляющий момент, расположены над сплошными частями магнитов, стороны катушек датчика угла, в которых формируется сигнал об угловых отклонениях ротора, расположены над пазами в магнитах, в рабочий зазор магнитной системы помещены генераторные катушки прямоугольной формы, соединенные последовательно и расположенные парами в два ряда над кольцевыми магнитами так, что они не выходят за пределы магнитной системы ротора датчика угла и момента, а оси каждого ряда находятся над пазами в соответствующем магните. Технический результат – повышение точности измерения абсолютной угловой скорости, увеличение диапазона измеряемых угловых скоростей. 6 ил.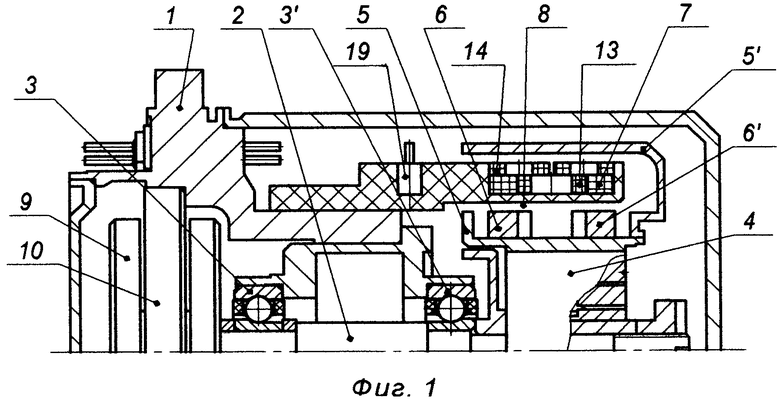
Динамически настраиваемый гироскоп, содержащий корпус, приводной вал, расположенный в корпусе на шарикоподшипниках, ротор, вращающийся вокруг оси вращения вала, упругий подвес, передающий вращение от вала к ротору и обеспечивающий ему две угловые степени свободы относительно вала, два кольцевых постоянных магнита, установленные на роторе и намагниченные в радиальном направлении, катушки прямоугольной формы, образующие статор двухкоординатного датчика угла и момента, двигатель, состоящий из ротора и статора, отличающийся тем, что на торцах магнитов, обращенных друг к другу, выполнены пазы, стороны катушек датчика момента, протекание тока в которых создает управляющий момент, расположены над сплошными частями магнитов, стороны катушек датчика угла, в которых формируется сигнал об угловых отклонениях ротора, расположены над пазами в магнитах, в рабочий зазор магнитной системы помещены генераторные катушки прямоугольной формы, соединенные последовательно и расположенные парами в два ряда над кольцевыми магнитами так, что они не выходят за пределы магнитной системы ротора датчика угла и момента, а оси каждого ряда находятся над пазами в соответствующем магните.
| US 4487083 A1, 11.12.1984 | |||
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| RU 93026419 A, 27.05.1996 | |||
| Способ получения ацетальдегида | 1949 |
|
SU77418A1 |
| CN 204301743 U, 29.04.2015. | |||

