Изобретение относится к области радиолокации, в частности к области защиты радиолокационных станций (РЛС) от пассивных помех, и может быть использовано для обеспечения работы обзорных РЛС в условиях воздействия пассивных помех.
Под пассивными помехами понимают сигналы, образующиеся на входе РЛС в результате рассеяния электромагнитных волн объектами, преднамеренно применяемыми в массовых количествах, например дипольными отражателями (Вакин С.А., Шустов Л.Н. Основы радиопротиводействия и радиотехнической разведки. - М., Сов. радио, 1968, с.259), а также в результате рассеяния электромагнитных волн метеообразованиями и подстилающей поверхностью.
Наиболее эффективными средствами защиты от пассивных помех являются методы селекции движущейся цели, основанные на различии радиальной скорости цели и объектов-источников пассивных помех. В этих средствах защиты применяется череспериодная компенсация (ЧПК) помех, при которой путем череспериодного вычитания подавляются принятые сигналы с неизменной (мало изменяющейся) амплитудой и выделяются сигналы, амплитуда которых изменяется (изменяется более значительно) от периода к периоду (Теоретические основы радиолокации. Под ред. В.Е.Дулевича. - М., Сов. радио, 1978, с.463, 469).
Известная РЛС, реализующая известный способ защиты от пассивных помех, содержит устройство ЧПК, включающее схему синхронизации, схему дифференциальной автоматической регулировки усиления, два усилителя, два амплитудных детектора, схему вычитания (Теоретические основы радиолокации. Под ред. В.Е.Дулевича. - М., Сов. радио, 1978, с.469-473).
В известных технических решениях средства защиты от пассивных помех применяются по всем принятым сигналам: отраженным от пассивных отражателей и по активным шумовым сигналам, излучаемым постановщиками активных шумовых помех и другими электронными средствами. Поскольку по активным шумовым сигналам указанные средства защиты неэффективны, а время, выделяемое в РЛС на защиту от пассивных помех, ограничено и, как правило, недостаточно для обеспечения защиты всей зоны обзора, то значительная часть зоны обзора РЛС оказывается не защищенной от пассивных помех. Это является недостатком известных технических решений.
Наиболее близким к заявляемому является способ защиты от пассивных помех, включающий предварительное (до начала работы РЛС) назначение в зоне обзора РЛС границ области, в пределах которых наличие пассивных помех предполагается наиболее вероятным (это, как правило, нижняя часть зоны обзора), и применение в пределах назначенных границ средств защиты от пассивных помех (например, ЧПК) (Воздушно-космическая оборона, №4(11) 2003, с.17, кол. 1-2).
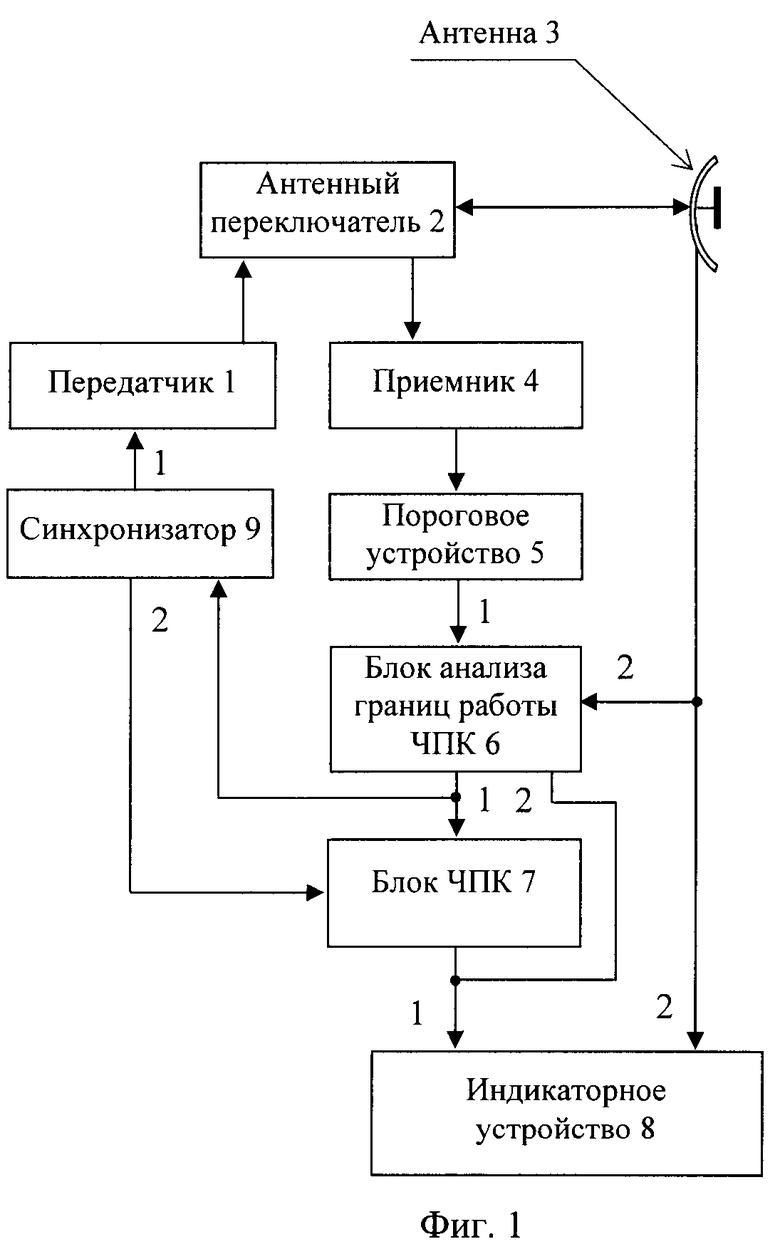
Наиболее близкое устройство (фиг.1), реализующее заявляемый способ, содержит передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, блок анализа границ работы ЧПК 6, блок ЧПК 7, индикаторное устройство 8, синхронизатор 9, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен с последовательно соединенными приемником 4, пороговым устройством 5, блоком анализа границ работы ЧПК 6, блоком ЧПК 7 и индикаторным устройством 8, вход блока ЧПК 7 соединен также со входом синхронизатора 9, координатный выход антенны 3 соединен со вторым входом блока анализа границ работы ЧПК 6 и вторым входом индикаторного устройства 8, второй выход блока анализа границ работы ЧПК 6 соединен с первым входом индикаторного устройства 8, первый и второй выходы синхронизатора 9 соединены с синхровходами передатчика 1 и блока ЧПК 7 соответственно (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана, - М., Сов. радио, 1970, стр.221).
Наиболее близкое устройство работает следующим образом.
В передатчике 1 по командам синхронизатора 9 (импульсам синхронизации) формируются зондирующие сигналы, соответствующие режиму регулярного обзора, которые с помощью антенны 3 излучаются в пространство. Принятые антенной 3 сигналы поступают в приемник 4, с выхода которого поступают на вход порогового устройства 5, где сравниваются с порогом, который задается исходя из допустимой вероятности ложных тревог. Сигналы, уровень которых превышает пороговый, с выхода порогового устройства 5 подаются в блок анализа границ работы ЧПК 6, на второй вход которого с координатного выхода антенны 3 подаются также координаты положения луча антенны 3. Если оказывается, что луч антенны находится в пределах заданных границ работы устройства ЧПК, то принятый сигнал с выхода блока анализа границ работы ЧПК 6 в качестве управляющего сигнала подается на вход синхронизатора 9, по которому изменяется режим работы передатчика 1, и передатчик 1 формирует зондирующие сигналы, соответствующие режиму ЧПК. Принятые затем сигналы с выхода блока анализа границ работы ЧПК 6 подаются на вход блока ЧПК 7 и далее - на вход индикаторного устройства 8 для отображения. Если луч антенны находится вне пределов указанных границ, то принятые сигналы подаются на вход индикаторного устройства 8, минуя блок ЧПК 7.
Недостатки наиболее близких технических решений заключаются в следующем. В наиболее близких технических решениях средства защиты от пассивных помех применяются по всем сигналам, принятым в пределах заданных границ. То есть указанные средства защиты применяются не только по отраженным сигналам, являющимися пассивными помехами (сигналам, отраженным от подстилающей поверхности, метеообразований, облаков искусственных отражателей), но также и по активным шумовым сигналам, излучаемым постановщиками активных шумовых помех и другими электронными средствами. Поскольку по активным шумовым сигналам указанные средства защиты не эффективны, то время (которое в обзорных РЛС всегда весьма ограничено) затрачивается при этом впустую. В результате в значительной части зоны обзора РЛС средства защиты от пассивных помех не включаются, и эта часть зоны оказывается не защищенной от пассивных помех. Защищенность РЛС от пассивных помех в целом по зоне обзора оказывается недостаточной.
Решаемой задачей (техническим результатом), таким образом, является увеличение защищенности РЛС от пассивных помех.
Указанный технический результат достигается тем, что в способе защиты радиолокационной станции (РЛС) от пассивных помех, создаваемых пассивными отражателями, включающий применение в направлениях зоны обзора средств защиты от пассивных помех, согласно изобретению в каждом направлении зоны обзора РЛС проводят анализ принятого сигнала, при котором определяют, является ли он отражением от пассивных отражателей или представляет собой активный шумовой сигнал, для чего формируют автокорреляционную функцию (АКФ) принятого сигнала, нормированную к его мощности, и сравнивают ширину нормированной АКФ по фиксированному уровню с порогом, который выбирают равным ширине нормированной АКФ, вероятность превышения которой в случае, когда принятый сигнал является активным шумовым сигналом, не превосходит заданного достаточно малого значения, при превышении указанного порога принимают решение о том, что принятый сигнал является отражением от пассивных отражателей, и применяют в данном направлении упомянутые средства защиты от пассивных помех.
Указанный технический результат достигается также тем, что в радиолокационную станцию, содержащую передатчик, антенный переключатель, антенну, приемник, пороговое устройство, блок ЧПК, индикаторное устройство, синхронизатор, при этом выход передатчика соединен со входом антенного переключателя, вход/выход которого соединен с антенной, выход антенного переключателя соединен с последовательно соединенными приемником и пороговым устройством, вход блока ЧПК соединен со входом синхронизатора, а выход его - с первым входом индикаторного устройства, второй вход индикаторного устройства соединен с координатным выходом антенны, первый и второй выходы синхронизатора соединены с синхровходами передатчика и блока ЧПК соответственно, согласно изобретению введен блок анализа принятых сигналов, вход и выход которого подключены соответственно к выходу порогового устройства и ко входу блока ЧПК, при этом блок анализа принятых сигналов содержит детектор огибающей сигнала, аналого-цифровой преобразователь (АЦП), n устройств задержки, n устройств умножения, квадратор, n+1 сумматоров, n устройств деления, блок определения ширины АКФ и устройство сравнения с порогом, причем вход детектора огибающей сигнала является входом блока анализа принятых сигналов, а выход его соединен со входом АЦП, выход которого соединен со входами n устройств задержки, входом квадратора и первыми входами n устройств умножения, выходы n устройств задержки соединены со вторыми входами соответствующих n устройств умножения, выходы которых соединены со входами n соответствующих сумматоров, выход квадратора соединен со входом n+1-го сумматора, выходы n сумматоров соединены с первыми входами соответствующих n устройств деления, выход n+1-го сумматора соединен с их вторыми входами, выходы n устройств деления соединены с соответствующими n входами блока определения ширины АКФ, выход которого соединен со входом устройства сравнения с порогом, выход устройства сравнения с порогом является выходом блока анализа принятых сигналов.
Суть изобретения состоит в следующем.
Известно, что в качестве средств защиты обзорной РЛС от пассивных помех, как правило, применяют устройства селекции движущихся целей, основанные на череспериодной компенсации принятых (ЧПК) помех. При работе РЛС в режиме ЧПК в каждом анализируемом направлении зоны обзора последовательно излучают не менее двух зондирующих сигналов РЛС. Принятые сигналы вычитают (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана, - М., Сов. радио, 1970, стр.466-471). Сигналы, отраженные от достаточно быстро движущихся объектов, раскоррелированы по времени и пространству и поэтому в устройстве ЧПК не компенсируются, а сигналы, отраженные от неподвижных или медленно движущихся отражателей (дипольных отражателей, метеообразований, местных предметов), которые, как правило, и являются источниками пассивных помех, имеют высокую степень корреляции и компенсируются.
Таким образом, средства защиты от пассивных помех используют достаточно много времени, которое в обзорных РЛС весьма ограничено.
Известно также, что в зоне обзора РЛС кроме пассивных отражателей сигналов существует множество активных шумовых источников излучения: постановщиков активных шумовых помех, соседних РЛС, других электронных средств, сигналы которых принимаются РЛС, и по ним в наиболее близких технических решениях также включаются средства защиты от пассивных помех. Поскольку по сигналам, излучаемым активными шумовыми источниками, средства защиты от пассивных помех неэффективны, то временные ресурсы РЛС, отвлекаемые при этом, растрачиваются напрасно. В результате в значительной части зоны обзора РЛС средства защиты от пассивных помех не включаются, и эта часть зоны оказывается не защищенной от пассивных помех. Защищенность РЛС от пассивных помех в целом по зоне обзора оказывается недостаточной.
Таким образом, средства защиты от пассивных помех должны применяться только в тех направлениях, в которых принятые сигналы являются сигналами, отраженными от пассивных отражателей, и не должны применяться в направлениях, в которых принятые сигналы представляют собой излучения активных шумовых источников. Это требование реализовано в заявляемых технических решениях.
В заявляемых технических решениях в каждом направлении зоны обзора РЛС осуществляется анализ принятого сигнала, при котором определяется, является ли он отражением от пассивных отражателей или представляет собой излучение активного шумового источника. Данный анализ основан на различии ширины АКФ принятого сигнала, отраженного от пассивного отражателя, и АКФ шумового сигнала, поскольку известно, что АКФ принятого сигнала, отраженного от пассивного отражателя, всегда шире, чем АКФ шумового сигнала (Гоноровский И.С.Радиотехнические цепи и сигналы. - М.: Сов. радио, 1977, с.146-150).
В процессе анализа принятого сигнала формируют АКФ принятого сигнала, нормированную к его мощности (Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. - М., Мир, 1978, с.444):
где i - порядковый номер дискреты принятого сигнала;
n - количество дискрет принятого сигнала;
р - количество дискрет, на которое задерживается принятый сигнал в процессе формирования АКФ (р=1,…, n), при этом время задержки сигнала равно:  , где τИ - длительность зондирующего сигнала;
, где τИ - длительность зондирующего сигнала;
хi - амплитуда принятого сигнала в i-й дискрете,
после чего измеряют ширину полученной АКФ по фиксированному уровню (обычно по уровню половинной мощности) ΔR0,5 и сравнивают ее с порогом ΔRa0,5, который выбирают равным ширине нормированной АКФ, вероятность превышения которой в случае, когда принятый сигнал является активным шумовым сигналом, не превышает заданного достаточно малого значения (например, 0.01).
Если измеренная ширина АКФ ΔR0,5 превышает выбранный порог ΔRa0,5, принимают решение о том, что принятый сигнал является отражением от пассивных отражателей, и в этом направлении применяют средства защиты от пассивных помех (например, ЧПК), в противном случае принимают решение о том, что принятый сигнал является излучением активного шумового источника, и средства защиты от пассивных помех не применяют.
Таким образом, в заявляемых технических решениях время, выделяемое в РЛС на защиту от пассивных помех, используется более эффективно. В результате увеличивается количество направлений зоны обзора, в которых применяются средства защиты от пассивных помех, и, следовательно, увеличивается защищенность РЛС от пассивных помех в целом по зоне обзора, то есть достигается заявляемый технический результат.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - функциональная схема наиболее близкой РЛС, реализующей наиболее близкий способ защиты от пассивных помех.
Фиг.2 - функциональная схема заявляемой РЛС, реализующей заявляемый способ защиты от пассивных помех.
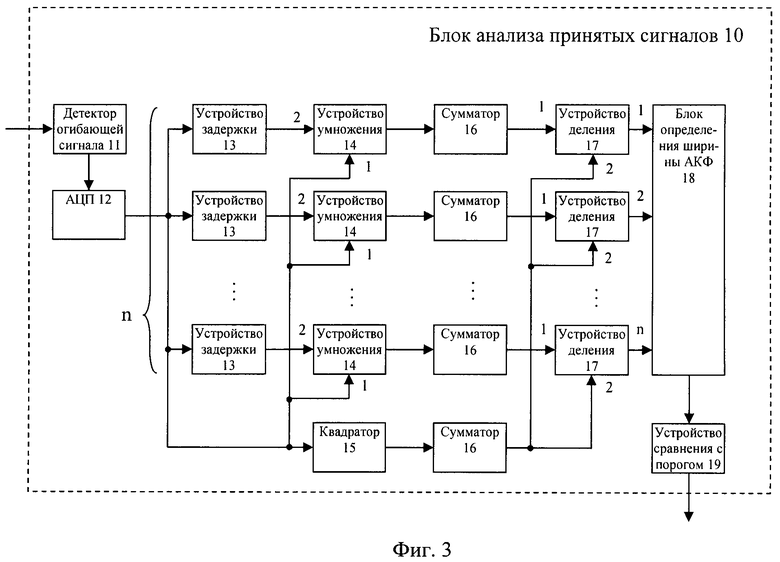
Фиг.3 - функциональная схема блока анализа принятого сигнала.
Заявляемая РЛС содержит (фиг.2) передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, блок ЧПК 7, индикаторное устройство 8, синхронизатор 9 и блок анализа принятых сигналов 10, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен с последовательно соединенными приемником 4, пороговым устройством 5, блоком анализа принятых сигналов 10, блоком ЧПК 7 и индикаторным устройством 8, при этом вход блока ЧПК 7 соединен также со входом синхронизатора 9, второй вход индикаторного устройства 8 соединен с координатным выходом антенны 3, первый и второй выходы синхронизатора 9 соединены с синхровходами передатчика 1 и блока ЧПК 7 соответственно. Блок анализа принятых сигналов 10 (фиг.3) содержит детектор огибающей сигнала 11, аналого-цифровой преобразователь (АЦП) 12, n устройств задержки 13, n устройств умножения 14, квадратор 15, n+1 сумматоров 16, n устройств деления 17, блок определения ширины АКФ 18 и устройство сравнения с порогом 19, причем вход детектора огибающей сигнала 11 является входом блока анализа принятых сигналов 10, а выход его соединен со входом АЦП 12, выход которого соединен с n входами устройств задержки 13, первыми входами n устройств умножения 14, входом квадратора 15, выходы устройств задержки 13 соединены со вторыми входами соответствующих устройств умножения 14, выходы которых соединены со входами n соответствующих сумматоров 16, выход квадратора 15 соединен со входом n+1-го сумматора 16, выходы n сумматоров 16 соединены с первыми входами n соответствующих устройств деления 17, вторые входы которых соединены с выходом n+1-го сумматора 16, выходы n устройств деления 17 соединены с соответствующими n входами блока определения ширины АКФ 18, выход которого соединен со входом устройства сравнения с порогом 19, выход устройства сравнения с порогом 19 является выходом блока анализа принятых сигналов 10.
Радиолокационная станция может быть выполнена с использованием следующих функциональных элементов.
Передатчик 1 - импульсного типа (Справочник по основам радиолокационной техники. - М., 1967, с.278).
Антенный переключатель 2 - выполнен на циркуляторе (Справочник по основам радиолокационной техники. - М., 1967, с.146-147).
Антенна 3 - фазированная антенная решетка с электронным сканированием по одной или обеим угловым координатам и с круговым механическим вращением (Справочник по радиолокации. Под ред. М. Сколника, т.2, - М.: Сов. радио, 1977, с.132-138).
Приемник 4 - супергетеродинного типа (Справочник по основам радиолокационной техники. - М.: 1967, с.343-344).
Синхронизатор 6 - выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В.Григорина-Рябова. - М., Сов. радио, 1970, с.602-603).
Блок ЧПК 7 - в соответствии с функциональной схемой, приведенной в источнике: Теоретические основы радиолокации. Под ред. Я.Д.Ширмана, - М., Сов. радио, 1970, стр.469, рис.17.4.
Индикаторное устройство 8 - устройство отображение информации (Автоматизация обработки, передачи и отображения радиолокационной информации. Под ред. В.Г.Корякова, - М., Сов. радио, 1975, с.176-221).
Пороговое устройство 5, детектор огибающей сигнала 11, аналого-цифровой преобразователь 12, устройство задержки 13, устройство умножения 14, квадратор 15, сумматор 16, устройство деления 17, блок определения ширины АКФ 18, устройство сравнения с порогом 19-цифровые устройства, выполненные на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина, - М.: «Радио и связь», 1984).
Работа заявляемой РЛС, реализующей заявляемый способ защиты от пассивных помех, происходит следующим образом. В передатчике 1 по командам синхронизатора 9 (импульсам синхронизации) формируются зондирующие сигналы, соответствующие режиму регулярного обзора, которые излучаются с помощью антенны 3. Принятые антенной 3 сигналы поступают в приемник 4 и далее - на вход порогового устройства 5, где сравниваются с порогом, который задается исходя из допустимой вероятности ложных тревог. Сигналы, уровень которых превышает пороговый, с выхода порогового устройства 5 подаются в блок анализа принятых сигналов 10, где определяется, является ли принятый сигнал отражением зондирующего сигнала от пассивных отражателей или представляет собой излучение активного источника шумового сигнала. Анализ принятого сигнала в блоке 10 проводится по ширине его автокорреляционной функции, нормированной к мощности принятого сигнала. Для этого с помощью детектора огибающей 11 исключается высокочастотное заполнение принятого сигнала, т.е. выделяется его огибающая. В аналого-цифровом преобразователе (АЦП) 12 полученный таким образом сигнал из аналогового вида преобразуется в цифровой, при котором он представляется в виде n дискрет, и подается на входы n устройств задержки 13. В каждом из этих устройств сигнал задерживается на время одной дискреты, равное  . C выхода n устройств задержки 13 сигналы поступают на первые входы n устройств умножения 14, на вторые входы которых с выхода АЦП 12 поступает незадержанный сигнал. Таким образом, произведения, полученные в устройствах умножения 14, определяются для каждой дискреты сигнала. Сигнал с выхода АЦП 12 поступает также на вход квадратора 15, в котором сигнал возводится во вторую степень, и таким образом определяется (для каждой дискреты сигнала) его мощность.
. C выхода n устройств задержки 13 сигналы поступают на первые входы n устройств умножения 14, на вторые входы которых с выхода АЦП 12 поступает незадержанный сигнал. Таким образом, произведения, полученные в устройствах умножения 14, определяются для каждой дискреты сигнала. Сигнал с выхода АЦП 12 поступает также на вход квадратора 15, в котором сигнал возводится во вторую степень, и таким образом определяется (для каждой дискреты сигнала) его мощность.
С выходов n устройств умножения 14 и квадратора 15 сигналы подаются на входы n+1 соответствующих сумматоров 16, где осуществляется соответственно суммирование полученных n произведений и квадратов сигнала. Полученные на выходах n сумматоров сигналы поступают на первые входы n устройств деления (в качестве делимого), на вторые входы которых поступает сигнал с выхода n+1-го сумматора (в качестве делителя). В результате на выходах n устройств деления 17 формируются значения АКФ принятого сигнала, нормированной к его мощности (1), причем каждое значение АКФ соответствует своему времени задержки . Полученные значения АКФ принятого сигнала поступают на вход блока определения ширины АКФ 18, в котором путем сравнения определяется порядковый номер устройства деления 17 (величина k), на выходе которого нормированная к мощности сигнала величина АКФ наиболее близка к фиксированному уровню, принятому для определения ширины АКФ (обычно это половинная мощность, то есть величина 0.5). Измеренная таким образом ширина нормированной АКФ с выхода блока 18 поступает на вход устройства сравнения с порогом 19. Величина порога в устройстве 19 устанавливается равной заранее определенной ширине нормированной АКФ принятого сигнала, вероятность превышения которой принятым сигналом в случае, когда он является активным шумовым сигналом, не превышает заданного достаточно малого значения. При превышении указанного порога принимается решение о том, что принятый сигнал является отражением зондирующего сигнала от пассивных отражателей, в противном случае считается, что принятый сигнал представляет собой излучение активного шумового источника.
Если результаты анализа в блоке анализа принятых сигналов 10 показывают, что принятый сигнал является отражением зондирующего сигнала от пассивных отражателей, то он в качестве управляющего сигнала подается на вход синхронизатора 9, по которому изменяется режим работы передатчика 1, и передатчик 1 формирует зондирующие сигналы, соответствующие режиму ЧПК. Принятые затем сигналы с выхода блока анализа принятых сигналов 10 подаются на вход блока ЧПК 7 и, если они являются отражениями от пассивных неподвижных или медленно движущихся отражателей, то подавляются в ЧПК 7, если же сигналы отражены от пассивного отражателя, являющегося движущейся с достаточно большой скоростью целью, то они в блоке ЧПК 7 не подавляется и подаются на индикаторное устройство 8.
Если же при анализе в блоке анализа принятых сигналов 10 оказывается, что принятый сигнал не является отражением зондирующего сигнала от пассивных отражателей, то он с выхода блока анализа принятых сигналов 10 не выдается.
Таким образом, в заявляемой РЛС средство защиты от пассивных помех - блок ЧПК 7 - включается только в направлениях зоны обзора РЛС, содержащих пассивные отражатели. В результате за счет более эффективного использования времени, выделяемого в РЛС на защиту от пассивных помех, увеличивается защищаемая от пассивных помех область зоны обзора, то есть достигается заявляемый технический результат.

Заявляемое техническое решение относится к области радиолокации, в частности к области защиты радиолокационных станций (РЛС) от пассивных помех, и может быть использовано для обеспечения работы обзорных РЛС в условиях воздействия пассивных помех. Достигаемым техническим результатом является увеличение защищенности РЛС от пассивных помех. Технический результат достигается тем, что в каждом направлении зоны обзора РЛС осуществляется анализ принятого сигнала, основанный на различии ширины автокорреляционной функции (АКФ) принятого сигнала, отраженного от пассивных отражателей, и АКФ шумового сигнала. Средства защиты от пассивных помех применяются только в тех направлениях, в которых принятый сигнал является отражением зондирующего сигнала от пассивных отражателей. 3 ил.
Способ защиты радиолокационной станции (РЛС) от пассивных помех, создаваемых пассивными отражателями, включающий применение в направлениях зоны обзора средств защиты от пассивных помех, отличающийся тем, что в каждом направлении зоны обзора РЛС проводят анализ принятого сигнала, при котором определяют, является ли он отражением от пассивных отражателей или представляет собой активный шумовой сигнал, для чего формируют автокорреляционную функцию (АКФ) принятого сигнала, нормированную к его мощности, и сравнивают ширину нормированной АКФ по фиксированному уровню с порогом, который выбирают равным ширине нормированной АКФ, вероятность превышения которой в случае, когда принятый сигнал является активным шумовым сигналом, не превосходит заданного достаточно малого значения, при превышении указанного порога принимают решение о том, что принятый сигнал является отражением от пассивных отражателей, и применяют в данном направлении упомянутые средства защиты от пассивных помех.
| Воздушно-космическая оборона, 2003, №4 (11), с.17, кол.1-2 | |||
| УСТРОЙСТВО ЗАЩИТЫ ОТ ПАССИВНЫХ ПОМЕХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ С СЕЛЕКЦИЕЙ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1963 |
|
SU1840386A1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ ОТ ПАССИВНЫХ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
RU2237906C2 |
| АДАПТИВНОЕ УСТРОЙСТВО ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПАССИВНЫХ ПОМЕХ | 1994 |
|
RU2097781C1 |
| US 4415898 A, 15.11.1983 | |||
| US 5359329 A, 25.10.1994 | |||
| US 5502448 А, 26.03.1996. | |||

