Область техники
Настоящее изобретение относится к мобильному стенду для испытания шины и к способу ее испытания на стенде.
Предшествующий уровень техники
Производители шин используют испытательные стенды для проверки различных параметров шин, таких как сопротивление ударам, эрозионная прочность при контакте с дорогой, на скорости, под нагрузкой и деформация при заносах.
Такие испытательные стенды могут быть стационарными или мобильными.
Стационарный испытательный стенд описан в документе (1), указанном среди ссылок в конце описания. В этом испытательном стенде колесо с проверяемой шиной устанавливают на оси над плоской конвейерной лентой с возможностью вхождения с ней в контакт при определенных нагрузках и с возможностью регулирования ее кривизны и направления. Приводимый в движение двигателем ленточный конвейер можно, таким образом, использовать для испытания указанной шины, имитируя определенные дорожные условия.
Подвижный испытательный стенд описан в ссылке (2). Этот испытательный стенд содержит тягач, шасси, шарнирно соединенное с тягачом, механизм привода колеса, оснащенного предназначенной для испытания шиной, ось которого соединена с измерительными элементами, закрепленными на шасси, механизм компенсации реактивного момента, измерительные элементы, записывающие устройства и гидравлическое устройство создания нагрузок на колесо. Этот испытательный стенд позволяет испытать указанную шину в реальных условиях эксплуатации.
Этот испытательный стенд предназначен для испытания шин, используемых на легковых автомобилях, грузовиках или тракторах. Он позволяет имитировать или воспроизводить различные условия эксплуатации шины, будь то скорость, нагрузка или угол заноса.
Однако такие испытательные стенды не позволяют воспроизводить все условия эксплуатации шин, установленных на ноге шасси самолета.
В настоящее время производители таких шин испытывают их в пределах возможностей имеющихся у них испытательных стендов и предоставляют данные произведенных замеров авиаконструкторам. Эти данные можно уточнять, чтобы привести их к значениям, близким к реальным условиям. Так, можно осуществлять первые измерения на известной шине, а затем заменить эту шину на шину, предназначенную для испытаний. На этой тестируемой шине можно осуществлять вторые измерения, стараясь воспроизвести первые измерения. Сравнение между этими измерениями позволяет лучше понять поведение тестируемой шины. Вместе с тем представляется сложным воспроизвести условия испытания, близкие к реальным. Кроме того, измерения невозможно производить для каждой шины в отдельности из-за габаритов и условий применения датчиков. Поэтому такие измерения всего лишь отражают среднее значение характеристик таких шин.
Для тестирования в реальных условиях эксплуатации шин авиаконструкторы прибегают также к технологии экстраполяции. Из соображений безопасности они могут завышать измеренные данные. Такие измеренные данные используют также для построения модели поведения самолета в целом. Обобщение такого рода еще больше снижает репрезентативность осуществленных таким образом экстраполяций.
В связи с этим объектом настоящего изобретения является мобильный испытательный стенд для испытаний шин, например авиационных шин, и способ применения этого стенда, позволяющие устранить эти недостатки.
Сущность изобретения
Настоящим изобретением предлагается мобильный стенд для испытания шины, отличающийся тем, что содержит самоходную платформу, выполненную с возможностью передвижения по прямолинейной и круговой траекториям, содержащий:
- инструментальный модуль для испытания комплекса колесо-шина, позволяющий ориентировать этот комплекс по всем направлениям, наклонять его и воздействовать на него вертикальным усилием,
- первые регулируемые по направлению оси, оборудованные подвесками и ведущими колесами,
- блок обработки, связанный с запоминающими устройствами,
- средства управления циклом испытаний, позволяющие управлять ориентацией указанного комплекса и действующей на него нагрузкой.
Предпочтительно этот испытательный стенд может дополнительно содержать средства сбора данных и управления траекторией, связанные с системой позиционирования, средства радиосвязи, позволяющие осуществлять связь с постом управления, и вторые регулируемые по направлению оси, оборудованные подвесками и ведомыми колесами. Испытательный стенд может быть выполнен с возможностью дистанционного управления. Он может быть выполнен также с возможностью транспортировки.
В предпочтительном варианте выполнения каждую ось оборудуют четырьмя колесами. Указанный испытательный стенд содержит восемь осей, оборудованных ведущими колесами, и четыре оси, оборудованные ведомыми колесами. Инструментальный модуль содержит первый силовой цилиндр, позволяющий создавать вертикальные усилия, прилагаемые к проверяемой шине, и, по меньшей мере, один второй силовой цилиндр, позволяющий наклонять шину. Два дизельных двигателя приводят в действие два гидравлических насоса, один для левой стороны платформы, другой - для правой стороны. Каждая ось оборудована силовым цилиндром для регулирования высоты платформы. По меньшей мере, одна камера обеспечивает отслеживание траектории испытательного стенда, и, по меньшей мере, одна камера позволяет производить оценку деформации проверяемой шины.
Указанный испытательный стенд содержит датчики растяжения/сжатия, расположенные в пространстве между осью колеса с проверяемой шиной и удерживающей его вилкой. Например, он содержит:
- два датчика для измерения продольного усилия и момента вокруг вертикальной оси,
- два датчика для измерения вертикального усилия и момента вокруг продольной оси,
- датчик для измерения бокового усилия,
- датчик для измерения момента вокруг боковой оси,
- датчик для измерения момента торможения.
Указанный испытательный стенд содержит систему сигнализации типа вращающегося маячка и звуковой сигнализатор.
Предпочтительно инструментальный модуль содержит силовой цилиндр, взаимодействующий с двумя стационарными и/или съемными балластами, позволяющий создавать вертикальные усилия, действующие на проверяемую шину.
Испытательный стенд является разборным и состоит из трех сбалансированных частей: двух полуплатформ и инструментального модуля, при этом обе полуплатформы являются самоходными.
В предпочтительном варианте выполнения проверяемый комплекс колесо-шина является комплексом колесо-шина самолета.
Объектом настоящего изобретения является также способ испытания шины на стенде, содержащий следующие этапы:
- этап позиционирования испытательного стенда в определенном месте испытательной дорожки,
- этап определения идеальной траектории испытательного стенда на малой скорости на продольной оси испытательной дорожки,
- один или несколько этапов испытаний, каждый из которых включает:
- фазу набора скорости испытательного стенда,
- фазу испытаний, во время которой запускают цикл последовательных углов заноса проверяемой шины, заранее программируемый и дистанционно загружаемый на испытательный стенд,
- фазу остановки.
Испытательный стенд в соответствии с настоящим изобретением позволяет воспроизводить все условия эксплуатации проверяемой шины, в том числе наиболее экстремальные с точки зрения вертикальной нагрузки, угла заноса и скорости. Этот испытательный стенд позволяет испытывать шину непосредственно на взлетно-посадочных полосах, в теплую или холодную погоду, на сухой полосе или на полосе с плохими условиями (мороз, дождь и т.д.).
Испытательный стенд в соответствии с настоящим изобретением предпочтительно позволяет:
- испытывать авиационные шины размером до 60" (1,524 м),
- испытывать шину на различных покрытиях, характерных для взлетно-посадочных полос аэропортов, на прямолинейных и/или круговых траекториях,
- осуществлять качение шины на разных установившихся скоростях (максимальная прямолинейная скорость 90 км/ч, максимальная круговая скорость 29,5°/с) или для фаз торможения по прямолинейной траектории,
- воздействовать на шину вертикальной нагрузкой от 1 до 75 т, при этом прикладываемая максимальная нагрузка связана с конкретным типом шины и может быть ограничена до 45 т для скоростей, превышающих 30 км/ч, и для круговых траекторий,
- устанавливать угол заноса шины по отношению к траектории +/-90° и ограничивать его значением +/-30°, если вертикальная нагрузка превышает 45 т,
- устанавливать угол развала/схождения для шины относительно вертикальной плоскости +/-5°,
- испытывать авиационную шину, установленную неподвижно, воздействуя на нее нагрузкой, например, в 30 т,
- испытывать авиационную шину на земле в условиях руления, посадки и взлета на малой скорости, воздействуя на нее нагрузкой, например, в 45 т,
- испытывать авиационную шину на земле на высокой скорости, воздействуя на нее нагрузкой, например, в 45 т.
Испытательный стенд позволяет также имитировать посадку. Наконец, он позволяет производить измерения по всей системе торможения проверяемого комплекса колесо-шина.
Краткое описание чертежей
Фиг.1 - схематичный вид испытательного стенда в соответствии с настоящим изобретением.
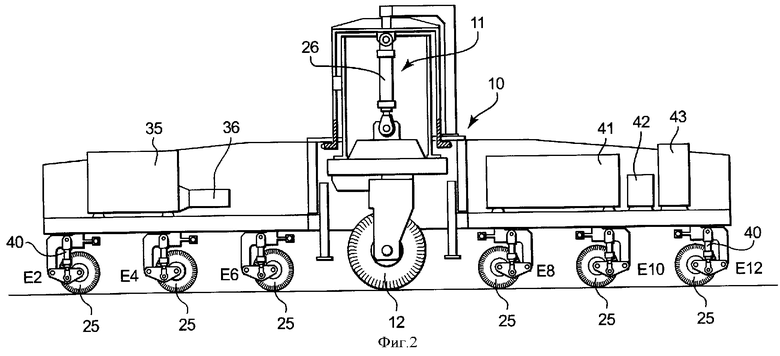
Фиг.2 - схематичный вид сбоку испытательного стенда в соответствии с настоящим изобретением.
Фиг.3 - схематичный вид сверху испытательного стенда в соответствии с настоящим изобретением.
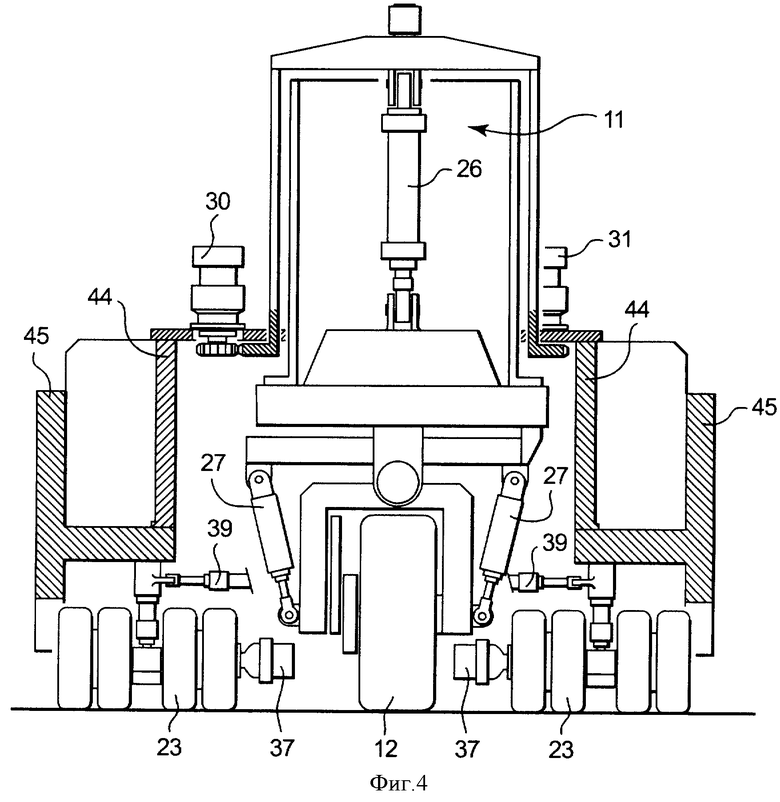
Фиг.4 - схематичный вид в разрезе испытательного стенда в соответствии с настоящим изобретением по сечению А-А, показанному на фиг.3.
Подробное описание частных вариантов выполнения
Мобильный испытательный стенд для испытания шины, например авиационной шины, показанный на фиг.1, состоит из самоходной платформы 10, выполненной с возможностью дистанционного управления и с возможностью перемещения по прямолинейной и круговой траекториям, и содержит:
- блок 15 обработки, связанный с запоминающими устройствами 16 и позволяющий управлять нижеуказанными элементами,
- инструментальный модуль 11 для испытания комплекса колесо-шина 12, позволяющий ориентировать этот комплекс 12 по всем направлениям, наклонять его (или устанавливать угол «развала/схождения») и воздействовать на него вертикальным усилием,
- подвешенные оси Е1…Еn, регулируемые по направлению и оборудованные ведущими колесами и, в случае необходимости, ведомыми колесами,
- средства 17 радиосвязи, позволяющие устанавливать сообщение с постом 18 управления,
- в случае необходимости, средства 19 сбора данных и управления траекторией, связанные с системой позиционирования 20,
- средства 21 управления, по меньшей мере, одним циклом испытаний, позволяющие управлять ориентацией указанного проверяемого комплекса 12 и действующей на него нагрузкой.
Этот испытательный стенд предпочтительно выполнен с возможностью его транспортировки, например, на полуприцепе.
В варианте выполнения, показанном на фиг.2, 3 и 4, оси, каждая из которых оснащена четырьмя колесами 25, например колесами для грузовика, выполнены в количестве двенадцати и обозначены позициями Е1-Е12. В другом варианте выполнения вместо двенадцати осей можно использовать четыре авиационных колеса, которые все являются ведущими.
По меньшей мере, две из этих осей, например восемь, обозначенных позициями Е3, Е4, Е5, Е6, Е7, Е8, Е9 и Е10, оборудованных зубчатыми механизмами 37, являются моторизованными осями. Другие оси E1, E2, Е11 и Е12 не моторизованы.
Инструментальный модуль 11 содержит первый силовой цилиндр 26, позволяющий создавать вертикальные усилия, действующие на проверяемую шину 12, и, по меньшей мере, один второй силовой цилиндр 27, позволяющий ее наклонять.
Зубчатые механизмы 30 и 31 на зубчатом венце 32 позволяют ориентировать проверяемую шину 12 по всем направлениям.
Два дизельных двигателя 35 приводят в действие, по меньшей мере, два гидравлических насоса 36: один для левой части платформы 10, другой для правой части для передачи движения на ведущие оси через гидравлические приводы 37.
Регулировочный контур позволяет управлять ориентацией осей E1-Е12 при помощи силовых цилиндров 39. Каждая из этих осей дополнительно содержит систему подвески, позволяющую регулировать при помощи силового цилиндра 40 высоту платформы 10. Можно также предусмотреть наличие опорных колес, не показанных на чертеже, например, в количестве восьми.
На фиг.2 показаны также другие различные элементы, а именно:
- гидравлический резервуар 41 с запасом жидкости для гидравлического контура, выполняющий функцию температурного буфера,
- система 42 охлаждения масла,
- электрический распределительный щит 43, от которого подается питание на все средства управления.
В центре платформы находится инструментальный модуль 11 с установленной в нем проверяемой шиной 12. Во время маневра бокового скольжения ведомые колеса ориентируют таким образом, чтобы они создавали боковое усилие, противодействующее боковому усилию, создаваемому проверяемым комплексом колесо-шина.
Действующие на проверяемую шину вертикальные усилия создаются первым силовым цилиндром 26, с которым взаимодействуют стационарные или съемные балласты 44 и 45, показанные на фиг.4.
Испытательный стенд в соответствии с настоящим изобретением позволяет замерять усилия, создаваемые шиной во время контакта шина/земля.
Испытательный стенд замеряет следующие величины:
- торсор усилий в центре проверяемого комплекса колесо-шина по метке колеса,
- реальную траекторию испытательного стенда,
- реальный угол заноса,
- реальный угол развала/схождения,
- тормозной момент колеса, оборудованного проверяемой шиной,
- температуру тормозного устройства,
- вертикальную нагрузку, прикладываемую к проверяемой шине,
- деформации проверяемой шины, наблюдаемые при помощи камеры,
- давление проверяемой шины.
Проблема габаритов, которая существовала в известных испытательных стендах при креплении датчиков, устранена. Испытательный стенд в соответствии с настоящим изобретением имеет достаточно места, необходимого для установки датчиков.
Этот испытательный стенд может быть разборным и состоять из трех частей (полуплатформа 50, полуплатформа 51 и инструментальный модуль 11), показанных на фиг.3, что позволяет легко осуществлять его перемещение. Эти три части сбалансированы, и ни одна из них не может опрокинуться.
Способ применения испытательного стенда в соответствии с настоящим изобретением содержит следующие этапы:
- этап позиционирования испытательного стенда в определенном месте испытательной дорожки после сборки его составных частей,
- этап определения «идеальной» траектории путем перемещения испытательного стенда на малой скорости вдоль продольной оси дорожки с одновременным определением точек этой траектории при помощи системы позиционирования, например, типа GPS ("Global Positioning System"),
- один или несколько этапов испытаний содержат, каждый:
- фазу набора скорости испытательного стенда, во время которой можно устанавливать угол развала/схождения и вертикальную нагрузку на проверяемую шину, при этом устанавливают нулевой угол заноса, а испытательный стенд разгоняют до заданной скорости.
- фазу испытаний, во время которой при достижении скорости испытания в испытательный стенд дистанционно загружают заранее запрограммированную последовательность углов заноса, которые устанавливают при помощи подшипников удержания заданного угла заноса в течение заданных промежутков времени с торможением или без торможения колеса, оборудованного проверяемой шиной.
- фазу остановки, которая состоит в торможении гидравлических приводов и в обнулении угла заноса.
В случае отказа одного из гидравлических приводов также включается торможение колеса, оборудованного проверяемой шиной. Во время этой фазы остановки контрольные средства обеспечивают удержание испытательного стенда на «идеальной» траектории. Может также автоматически включаться экстренная остановка, если контрольные средства или оператор обнаруживают опасность схода с дорожки.
Пример предпочтительного варианта выполнения
В этом варианте выполнения испытательный стенд в соответствии с настоящим изобретением содержит самоходную платформу, состоящую из двух полуплатформ, расположенных по обе стороны от инструментального модуля.
Этот испытательный стенд может быть определен следующим образом.
1) Основные характеристики
Этот испытательный стенд оборудован двенадцатью осями на подвесках, регулируемыми по направлению; каждая ось оснащена четырьмя шинами типа «Мишлен 245/70 R17,5 XTE2», накачанными азотом.
Два программируемых автоматических устройства управляют каждым распределителем направления при помощи осевой карты, в котором обратный измерительный канал образован абсолютным преобразователем, установленным на рассматриваемой оси.
В собранном виде испытательный стенд имеет длину 14 м, ширину 4,5 м и высоту 5,5 м. В зависимости от наличия или отсутствия балласта его вес колеблется от 60 т до 190 т.
В разобранном виде этот испытательный стенд состоит, в частности, из следующих частей:
- две полуплатформы, имеющие следующие характеристики:
вес <35 т,
длина: 14 м,
ширина: 2,4 м,
высота <3,7 м;
- инструментальный модуль (нижняя часть), имеющий следующие характеристики:
вес <10 т,
длина: 2,3 м,
ширина: 2 м,
высота <3 м;
- инструментальный модуль (верхняя часть), имеющий следующие характеристики:
вес <15 т,
длина: 3 м,
ширина: 3 м,
высота <3,5 м;
- балласты «мертвый груз», выполненные в виде стальных плит весом примерно 4,5 тонн каждая, при этом каждая плита имеет следующие размеры: высота: 0,2 м; длина: 2,85 м; ширина: 1 м; эти плиты образуют два набора по 27,5 т (вес <55 т);
- пост управления, имеющий следующие характеристики:
вес <2 т,
длина: 4,41 м,
ширина: 2,44 м,
высота <2,61 м.
2) Средства моторизации
Этот испытательный стенд оборудован двумя тепловыми двигателями, приводящими в действие два гидравлических насоса. Эти насосы приводят в действие восемь гидравлических приводов с передачей мощности с вторичным регулированием на ведущие оси. Давление в гидравлическом контуре поддерживается почти постоянным. Благодаря этому не происходит изменения объема из-за сжимаемости используемой рабочей жидкости. Собственная частота приводного узла понижения передачи мощности практически может быть бесконечной. За счет этого можно быстро и точно производить динамическое регулирование скорости.
Используют плунжерные насосы с переменным рабочим объемом, выполненные с возможностью автоматического регулирования (поддержание давления, отсечка напора).
Силовые приводы являются приводами с переменным рабочим объемом, которые обладают следующими преимуществами. Их используют для создания поступательного движения заднего и переднего хода платформы путем простой инверсии рабочего объема, а также для торможения платформы. В фазе торможения также осуществляют инверсию рабочего объема, а рабочий объем насосов приводят к нулю. В этом случае приводы действуют как насосы, и энергия гасится на ограничителях давления.
Рабочий объем приводов регулируют в каждый момент при помощи автоматического контура регулирования скорости. Заданное значение скорости устанавливают в зависимости от конкретного испытания.
3) Управление
Система управления испытательного стенда позволяет решать три задачи:
- управление платформой с одновременным получением любой информации, связанной с ее работой (тревожные сигналы, аварийные сигналы и т.д.),
- полное и автономное управление испытательным циклом одновременно с наблюдением со стороны оператора и с автоматическим контролем,
- обеспечение безопасности людей и оборудования во время испытаний.
Таким образом, испытательный стенд характеризуется отсутствием оператора на его борту. Во время испытаний система управляется двумя бортовыми автоматическими устройствами и отслеживает «идеальную» траекторию. Оператор находится на удалении от поста управления и использует терминал управления, позволяющий выбирать режимы хода и функции, аналоговую рукоятку («джойстик») с двумя осями движение/направление и две нажимные кнопки пуска и остановки испытания.
Сообщение между постом управления и платформой осуществляется при помощи независимых средств радиосвязи, которые обеспечивают:
- связь управления и измерения, включающую видеоканалы связи,
- связь обеспечения безопасности (приоритетные команды).
Оси платформы скомпонованы в четыре группы по три оси: переднюю левую группу, переднюю правую группу, заднюю левую группу и заднюю правую группу.
Для прямолинейных траекторий оси одной и той же группы связаны механически соединительными тягами. Они имеют одинаковое заданное значение ориентации, которое является средним значением заданных значений независимой работы.
Определение идеальной траектории производят в начале каждого блока испытаний на малой скорости на продольной оси дорожки. Система DGPS ("Differential Global Positioning System") обеспечивает сбор информации о точках этой траектории и определение курса движения на дорожке.
Во время испытаний по прямолинейной траектории в результате измерений, производимых DGPS и измерителем скорости, программируемые автоматические устройства получают данные о реальной траектории и курсе движения. Сравнивая эти данные с измерениями, полученными при определении идеальной траектории, контрольные средства автоматически определяют корректирующие углы для передачи на каждую из групп осей, чтобы привести испытательный стенд на «идеальную» траекторию.
Этот испытательный стенд позволяет также имитировать условия посадки, приводя проверяемую шину в контакт с землей при скоростях поступательного перемещения платформы, превышающих 55 км/ч, и при вертикальной скорости касания с землей порядка 3 м/с.
В этом случае специфический цикл испытания можно разложить на три фазы:
- фазу набора скорости испытательного стенда, во время которой углы развала/схождения устанавливают на ноль, на проверяемую шину не действует никакая вертикальная нагрузка, испытательный стенд разгоняют до заданной скорости,
- фазу испытаний, во время которой на проверяемой шине можно устанавливать угол заноса в диапазоне, ограниченном +/-10°, при достижении скорости испытания колесо с проверяемой шиной приводят в контакт с землей при значении вертикальной скорости 3 м/с. После этого при помощи подшипников удержания заданного угла заноса на испытательный стенд можно дистанционно загрузить заранее запрограммированную последовательность углов заноса для заданных промежутков времени с торможением этого колеса или без торможения,
- фазу остановки, которая состоит в торможении гидравлических приводов и в обнулении угла заноса.
Проверяемый комплекс колесо-шина оборудован устройством торможения, реально существующим на самолете, что позволяет производить испытание этого устройства и, в частности, антиблокировочной системы.
4) Наблюдение за испытанием
В начале испытания при помощи экрана, воспроизводящего данные предстоящего испытательного цикла (кинематика платформы, установка угла заноса и т.д.), отвечающий за испытания наблюдатель, находящийся в посту управления, может дать подтверждение на этот цикл до начала испытания (на основании своего опыта или с учетом предыдущих испытаний). Такая имитация позволяет подтвердить соответствие цикла испытательной дорожке.
После этого программу цикла загружают дистанционно при помощи радиосвязи в программируемое автоматическое устройство каждой из двух полуплатформ. Одно из автоматических устройств считается «управляющим», а другое - «исполнительным». Оператор запускает испытание нажатием на стартовую кнопку. Программируемое управляющее автоматическое устройство задает последовательность испытательного цикла. Динамическое управление траекторией непосредственно действует на углы поворота колес платформы для компенсации бокового усилия, создаваемого при ориентации по заносу колеса, оборудованного проверяемой шиной. Оно обеспечивает оптимальное отслеживание траектории, заданной оператором, при сохранении постоянной скорости, если позволяет установившаяся мощность (в противном случае скорость корректируется).
Во время реализации испытательного цикла оператор отслеживает траекторию при помощи камер, установленных на испытательном стенде. Другие камеры, также установленные на испытательном стенде, позволяют производить оценку деформаций проверяемой шины. В случае отклонения от траектории оператор может скорректировать эту траекторию из поста управления при помощи рукоятки. Специальная видеосвязь обеспечивает сообщение между бортовой видеосистемой и видеомонитором, установленным в посту управления. Оператор может выводить на экран монитора изображение от одной или от нескольких камер. Таким образом, отпадает необходимость в наличии «автомобиля сопровождения» испытательного стенда.
Во время перемещения данные о состоянии датчиков и приводов управления передаются на пост управления, что позволяет наблюдателю отслеживать на экране изменение измеряемых величин.
Управляющее программируемое автоматическое устройство может получить сообщение о потере связи в системе защиты, о чем свидетельствует обнуление сигналов (регулируемая задержка составляет от 0,5 до 4 с для блокировки возможных кратковременных отключений), и может запустить программу остановки испытательного стенда в соответствии с заранее определенным протоколом.
Отмену испытания и процедуру остановки испытательного стенда может также запустить оператор из поста управления путем подачи команды при помощи нажимной кнопки «стоп», которая передается системой защиты.
Автоматические процедуры защиты осуществляются программируемыми автоматическими устройствами для ограничения критических ситуаций во время испытания, в частности, путем ограничения угла заноса колес платформы в зависимости от ее скорости, ограничения резкого изменения траектории при корректировке, ограничения времени испытания для больших углов заноса колеса, оборудованного проверяемой шиной.
В дополнение к измерениям, связанным с испытанием шины, можно также производить замеры различных величин для обеспечения динамического управления испытательным стендом и контроля за испытанием из поста управления, таких как:
- скорость перемещения испытательного стенда,
- пройденное им расстояние,
- продольное и боковое ускорения испытательного стенда,
- положение платформы (углы поперечного и продольного наклона),
- высота платформы,
- реальная траектория платформы,
- курс движения платформы.
5) Режимы хода/управления
Были определены различные режимы хода/управления:
- режим расцепления, во время которого каждая полуплатформа является самоходной и содержит автомат: в фазе монтажа/демонтажа обе полуплатформы отсоединены друг от друга и управляются независимо с локального пульта управления. В этом режиме возможно только управление по поступательному движению и по направлению и только на малой скорости. В фазе монтажа после соединения обеих полуплатформ вокруг инструментального модуля производят подключение всех соединительных кабелей, и стенд считается собранным. Режим расцепления прекращается, и возможно использование только пульта управляющего автоматического устройства,
- локальный ручной режим, во время которого пульт, соединенный с управляющим автоматическим устройством, позволяет влиять на все движения, которые может совершать испытательный стенд. Пульт является передвижным и соединен с распределительным щитом при помощи кабеля длиной примерно 3 м. Он позволяет включать или выключать испытательный стенд, включать поступательное движение переднего/заднего хода, левые/правые повороты по направлению (с использованием дисплея, на который выводится угол поворота осей платформы), регулировать высоту платформы и колеса, оборудованного проверяемой шиной. Движения поступательного перемещения и поворотов ограничены малыми скоростями,
- дистанционный ручной режим, являющийся аналогичным предыдущему, но управляемый непосредственно из поста управления,
- автоматический режим, являющийся режимом использования испытательного стенда для осуществления испытаний проверяемой шины.
6) Интерфейс человек/машина
В посту управления оператор использует компьютерный терминал типа PC («Personal Computer») в качестве интерфейса управления, который позволяет осуществлять:
- задание параметров и контроль за ходом испытаний,
- выбор режима ход/управление,
- вывод на дисплей мнемонической схемы состояния и значений датчиков и приводов управления,
- вывод на дисплей отчета о дефектах и аварийных сигналах.
Оператор имеет в своем распоряжении также компьютерный терминал типа PC, используемый в качестве интерфейса измерения, который позволяет:
- накапливать данные, поступающие с испытательного стенда, при этом некоторые данные передаются на пост управления по радио для контроля за испытанием в режиме реального времени,
- по завершении испытания вводить в память данные, собранные на носитель информации.
Видеомонитор обеспечивает следующие функции:
- считывание изображений, передаваемых по радио от бортовых камер,
- вывод на цветной экран изображение в режиме «полиэкран» или «полный экран»,
- управление трансфокатором, углами наклона и горизонтального направления каждой камеры.
7) Инструментальное оснащение
Определение торсора усилий, создаваемых проверяемой шиной, осуществляется специальными инструментами, находящимися максимально близко к центру колеса, оборудованного проверяемой шиной, в месте, где требуется рассчитать торсор. Датчики растяжения/сжатия установлены в пространстве между осью колеса, оборудованного проверяемой шиной, и вилкой этого колеса, например:
- два датчика для измерения продольного усилия и момента вокруг вертикальной оси (момент самовыравнивания),
- два датчика для измерения вертикального усилия и момента вокруг продольной оси,
- датчик для измерения бокового усилия,
- датчик для измерения момента вокруг боковой оси,
- датчик для измерения момента торможения.
На различных деталях испытательного стенда используют преобразователи для определения различных величин (ход силовых цилиндров ориентации, скорость колес платформы и т.д.), позволяющие осуществлять динамическое управление испытательным стендом.
8) Сборка стенда
Инструментальный модуль состоит из двух отдельных частей:
- вилка, которая позволяет позиционировать колесо, оборудованное проверяемой шиной, в разных угловых положениях и в которой установлены датчики измеряемых усилий, при этом с вилкой взаимодействует также зубчатое колесо установки угла заноса,
- часть цилиндрической формы, расположенная над вилкой и являющаяся силовым цилиндром, который позволяет одновременно регулировать вилку по высоте и создавать вертикальное усилие.
Для перемещения и сборки этого модуля и двух полуплатформ используют кран.
После сборки модуль оказывается охваченным со всех сторон двумя самоходными полуплатформами. Сначала полуплатформы соединяют между собой при помощи болтовых соединений. Затем при помощи болтовых соединений их соединяют с модулем.
Указанный кран необходим также для перемещения балласта и для его установки на платформе. Размер и вес балласта определяют в зависимости от выбранного испытательного цикла.
9) Сигнализация-освещение
Испытательный стенд оборудован системой сигнализации типа вращающегося маячка для указания хода и, в случае необходимости, звуковым сигнализатором.
Испытательный стенд оборудован двумя прожекторами мощностью 300 Вт и флуоресцентными лампами в распределительных щитах.
ССЫЛКИ
1. US 4238954.
2. RU 2085891.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕДВИЖНОЙ ПРИЦЕП-СТЕНД ДЛЯ ДИАГНОСТИКИ, РЕГУЛИРОВКИ, РЕМОНТА, УСТАНОВКИ ТОРМОЗНОЙ СИСТЕМЫ КОЛЕС АВТОМОБИЛЕЙ | 2011 |
|
RU2456184C1 |
| Стенд для испытания автогрейдера | 1989 |
|
SU1647336A1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2005 |
|
RU2279361C1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД ДЛЯ ДИАГНОСТИРОВАНИЯ ТОРМОЗНОЙ СИСТЕМЫ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2613076C1 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ОСИПОВА ДЛЯ ДИАГНОСТИРОВАНИЯ ТОРМОЗОВ И ПОДВЕСКИ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2584641C1 |
| ПЕРЕДВИЖНОЙ ПРИЦЕП-СТЕНД ДЛЯ ДИАГНОСТИКИ, РЕГУЛИРОВКИ, РЕМОНТА, УСТАНОВКИ УГЛОВ СХОЖДЕНИЯ И РАЗВАЛА КОЛЕС АВТОМОБИЛЕЙ | 2010 |
|
RU2442127C1 |
| Стенд для испытания шин | 1979 |
|
SU966530A1 |
| Стенд для испытания противоблокировочной системы транспортного средства | 1984 |
|
SU1245472A1 |
| СПОСОБ ОЦЕНКИ ТОРМОЗНОЙ ЭФФЕКТИВНОСТИ И УСТОЙЧИВОСТИ АВТОМОБИЛЯ, ОБОРУДОВАННОГО АНТИБЛОКИРОВОЧНОЙ СИСТЕМОЙ, СПОСОБ ОЦЕНКИ РАБОТОСПОСОБНОСТИ АНТИБЛОКИРОВОЧНОЙ СИСТЕМЫ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБОВ | 2008 |
|
RU2365516C1 |
| СТЕНД ОЦЕНКИ ТЯГОВО-СЦЕПНЫХ СВОЙСТВ ШИН С ПОКРЫТИЕМ | 2020 |
|
RU2738363C1 |


Изобретение относится к мобильному испытательному стенду для испытания шины. Испытательный стенд содержит самоходную платформу, инструментальный модуль, первые регулируемые по направлению оси, вторые регулируемые по направлению оси, блок обработки, средства управления циклом испытаний. Способ включает этап позиционирования испытательного стенда в определенном месте испытательной дорожки, этап определения идеальной траектории путем перемещения испытательного стенда на малой скорости вдоль продольной оси дорожки и считывания точек этой траектории при помощи системы позиционирования, один или несколько этапов испытания. Технический результат заключается в обеспечении воспроизведения всех условий эксплуатации проверяемой шины. 2 н. и 20 з.п. ф-лы, 4 ил.
1. Мобильный испытательный стенд для испытания комплекса колесо-шина, который содержит: самоходную платформу, выполненную с возможностью передвижения по прямолинейной и круговой траекториям на испытательной дорожке, инструментальный модуль, расположенный в центре платформы для испытания комплекса колесо-шина, позволяющий вводить в контакт комплекс колесо-шина с испытательной дорожкой и ориентировать его во всех направлениях, наклонять комплекс колесо-шина, и воздействовать на комплекс колесо-шина вертикальным усилием, первые регулируемые по направлению оси, смонтированные на платформе и оборудованные подвесками и ведущими колесами, вторые регулируемые по направлению оси, смонтированные на платформе и оборудованные подвесками и ведомыми колесами, первые и вторые регулируемые по направлению оси группируются в четыре группы: переднюю левую группу, переднюю правую группу, заднюю левую группу и заднюю правую группу, блок обработки, связанный с запоминающими устройствами, который позволяет управлять инструментальным модулем и первыми и вторыми регулируемыми по направлению осями, и средства управления циклом испытаний, позволяющие управлять ориентацией комплекса колесо-шина и действующей на комплекс нагрузкой.
2. Испытательный стенд по п.1, содержащий средства сбора данных и управления траекторией, связанные с системой (20) позиционирования.
3. Испытательный стенд по п.1, выполненный с возможностью дистанционного управления.
4. Испытательный стенд по п.3, содержащий средства (17) радиосвязи, позволяющие устанавливать сообщение с постом (18) управления.
5. Испытательный стенд по п.1, выполненный с возможностью транспортировки.
6. Испытательный стенд по п.1, содержащий вторые регулируемые по направлению оси, оборудованные подвесками и ведомыми колесами.
7. Испытательный стенд по любому из пп.1 или 6, в котором каждая ось оборудована четырьмя колесами.
8. Испытательный стенд по п.7, содержащий восемь осей (Е3-Е10), оборудованных ведущими колесами, и четыре оси (El, E2, Ell, E12), оборудованные ведомыми колесами.
9. Испытательный стенд по п.1, в котором инструментальный модуль (11) содержит первый силовой цилиндр (26), обеспечивающий создание вертикальных усилий, действующих на проверяемую шину, и, по меньшей мере, один второй силовой цилиндр (27), позволяющий ее наклонять.
10. Испытательный стенд по п.1, содержащий два дизельных двигателя (35), приводящие в действие, по меньшей мере, два гидравлических насоса (36): один для левой части платформы, другой для правой части.
11. Испытательный стенд по любому из пп.1 или 6, в котором каждая ось оборудована силовым цилиндром (40) для регулирования высоты платформы.
12. Испытательный стенд по п.1, содержащий, по меньшей мере, одну камеру, позволяющую отслеживать траекторию, и, по меньшей мере, одну камеру, позволяющую производить оценку деформаций проверяемой шины.
13. Испытательный стенд по п.1, содержащий два датчика растяжения/сжатия, расположенные в пространстве между осью колеса, оборудованного проверяемой шиной, и вилкой, поддерживающей это колесо.
14. Испытательный стенд по п.8, содержащий два датчика для измерения продольного усилия и момента вокруг вертикальной оси, два датчика для измерения вертикального усилия и момента вокруг продольной оси, датчик для измерения бокового усилия, датчик для измерения момента вокруг боковой оси, датчик для измерения момента торможения.
15. Испытательный стенд по п.1, содержащий систему сигнализации типа вращающегося маячка и звуковой сигнализатор.
16. Испытательный стенд по п.1, в котором инструментальный модуль (11) расположен в центре платформы.
17. Испытательный стенд по п.1, в котором инструментальный модуль содержит силовой цилиндр (26), взаимодействующий со стационарными и/или съемными балластами (44, 45), позволяющий создавать вертикальные усилия, действующие на проверяемую шину.
18. Испытательный стенд по п.1, являющийся разборным и состоящий из трех сбалансированных частей: двух полуплатформ (50, 51) и инструментального модуля (11).
19. Испытательный стенд по п.18, в котором обе полуплатформы (50, 51) являются самоходными.
20. Испытательный стенд по п.1, в котором проверяемый комплекс (12) колесо-шина является авиационным комплексом колесо-шина.
21. Способ испытания шины на стенде, выполненном согласно любому из предыдущих пунктов, и содержащий следующие этапы: этап позиционирования испытательного стенда в определенном месте испытательной дорожки, этап определения идеальной траектории путем перемещения испытательного стенда на малой скорости вдоль продольной оси дорожки и считывания точек этой траектории при помощи системы позиционирования, один или несколько этапов испытания.
22. Способ по п.21, в котором каждый этап содержит фазу набора скорости испытательного стенда, фазу испытания, во время которой заранее запрограммированную последовательность углов заноса проверяемой шины дистанционно загружают в испытательный стенд и запускают испытание, фазу остановки.
| ШИННЫЙ ТЕСТЕР | 1999 |
|
RU2167402C2 |
| 0 |
|
SU151849A1 | |
| KR 20020012366 А, 16.02.2002 | |||
| Устройство для испытания шин | 1986 |
|
SU1399658A1 |
| Экскаватор | 1926 |
|
SU17646A1 |
| Стенд для испытания пневматических шин | 1984 |
|
SU1188563A1 |
| Двухполярный источник питания | 1982 |
|
SU1072027A1 |
| Устройство для выключения счетчика числа отпечатанных листов при холостом ходе | 1930 |
|
SU25309A1 |

