Изобретение относится к транспортным средствам, а именно к испытанию транспортных средств, оборудованных проти- воблокировочными системами (ПБС).
Целью изобретения является повышение точности моделирования процесса торможения и оценки устойчивости и управляемости.
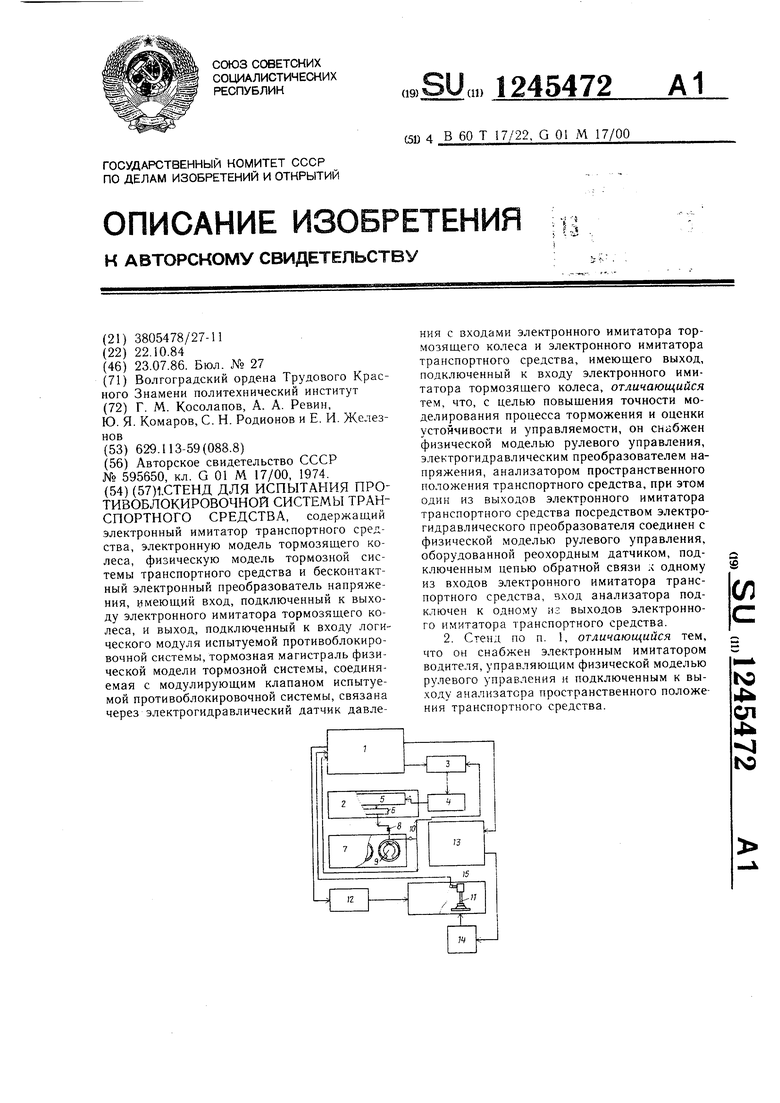
На чертеже представлена блок-схема стенда.
Стенд содержит члектронный имитатор 1 транспортного средства, испытываемую про- тиаоблокировочную систему 2, электронный имитатор 3 тормозных колес и бесконтактный электронный преобразователь 4 напряжения. Посредством включенных в состав противоблокировочной системы 2 лО1 ическо- го .модуля Г) и модулирующего клапана 6 физическая .модель 7 тормозной системы соединена с электронным имитатором 1 транс- 1 Ортного средства и электронным имитатором 3 тормозных колес. В физическую мо.аель 7 тормозной системы входит регулятор 8 давления, тормозной механизм 9 и датчик 10 давления. Стенд снабжен физической моделью 1 1 рулевого управления, связанной с входом электронного и.митато- ра 1 транспортного средства и через электрогидравлический преобразователь 12 напряжения с его выходом, а также анализатором 13 пространственного положения транспортного средства, вход которого подключен к электроь но.му имитатору I транспортного средства, а выход через и.митатор 14 водителя - к физической модели 11 рулевого управления. Одной из составньгх частей стенда является физическая .модель 7 тор.мозной системы, в качестве которой используется реальный тормозной привод легкового автомобиля. Связь физической .модели 7 тормозной системы с электронными имитаторами транспортного средства 1 и его тормозных колес 3 осуществляется посредством датчиков 10 давления, установленных на входе в рабочие тормозные цилиндры.
В состав стенда входит исследуемая ПБС 2, состоящая из логического моду.чя 5 и модулирующего клапана 6.
Для исследования управляемого движения транспортного средства в ко11струкц5-:ю стенда введена физическая модель 11 f)y.. ie- вого управления, в качестве которой использованы реальные узлы автомобиля: рулевой механизм с , рулевая колонка и колесо, а характеристики рулев1 1х тяг, рычагов новоротных стоек с цапфами, подвески и дорожных условий при этом моделируются блоками АВ.М.
В качестве стыковочь-ого уз.ча между -(лектронным имитатором транспортного средства и физической моделью 11 рулево1-о управления применен электрогидравлический преобразователь 12 напряжения, )уктивно выполненный на базе рулевой мк0
5
0
5
0
0
.S
0
.ки типа РА-42, применяемой в авиации. Он служит для .моделирования момента на руле13ом колесе и кинематически связан с рулевой соткой физической модели 1 i рулевого управления. Обратная связь осуществляется с помощью реохордного датчика 15, установленного на рулевом механизме.
Электронные имитаторы транспортного средства 1 и его тормозных колес 3 конструктивно peineHbi на основе аналогового вычислительного комплекса, состоящего из АВМ ЭМУ-10 и трех АВМ МН-7, и реализующего пространственную мате.матическую модель транспортного средства.
Функцию стыковочного узла между электронными имитаторами транспортного средства 1 и его тормозных колес 3 с ПБС 2 выполняет электронный преобразователь 4 напряжения. Он преобразует аналоговый сигнал АВМ в частотный, пропорциональный угловой частоте вращения колеса.
С целью приближения .моделируемого процесса торможения транспортнвго средства с ПБС к реально.му, оценки его устойчивости и управляемости, в стенд вводится анализатор ;3 пространственного положения. Он содержит телевизор, видеомаг- нитофо.ч и электронный блок ком.мутации. Видео.магнитофон служит для записи и вос- произведе.чия на экране телевизора реальной дс рожной обстановки. Запись обстановки предварительно производится в реальных дорожнь х ус;1овиях на однотипном транс- портнс.м средстве. Транспортное средство оборудуется видео.магнитофоном с камерой, носредство.м которых фиксируется воснрини- .мае.мая водителем обстановка.
Воспроизведение дорожной обстановки на экране телевизора с видеомагнитофона осу- |цеств;1яется по постуцаюпшм с блоков АВМ сигнала. лпн ейной скорости транспортного средства, курсового угла и отклоне.ния центра масс путем из.менения скорости протяжки )г смсп1ения растра на экране. Работа электронного имитатора 14 водителя предполагает исгь :;льзование операторов различной квалификации и водительского стажа.
Стецд работает следующим образом.
При нажатии водителе.м на тормозную педаль транспортного средства производится и; 1итация его торможения. Аналоговый сигна.л из электронного имитатора 3 тормозных колес, пропорпиональный их у.гло- вым скоростям, поступает на вход бескон- тактно1 о преобразователя 4 напряжения, где он преобразуется в частотную форму и подается на логический .модуль 5 противо- блокирс)вочной системы 2. При начавшемся блокировании одног О из колес логический модуль 5 Е.ыдает компндный сигнал на модулирующий клапан 6, срабатьп.ание которого приводит к уменьшению давления в тормозном механиз.ме 9.
Производится растормаживание колеса. В дальнейшем при изменениях давления в тормозной системе цикл работы стенда повторяется.
Сигнал из электронного имитатора 1 транспортного средства, пропорциональный стабилизирующему моменту шин с учетом углов их увода, перераспределения нормальных реакций на колесах, параметров подвески, рулевого управления, тормозного привода, структурных схем ПБС и т. д. испытываемого транспортного средства, поступает на управляющие обмотки четырехлинейного золотникового преобразователя 12 напряжения, регулируя подачу рабочего тела в испытательном силовом цилиндре, тем самым изменяя усилие на рулевом колесе физической модели 11 рулевого уп
равления. Напряжение, соответствующее углу поворота рулевого колеса, поступает в электронный имитатор 1 транспортного средства. Сигнал, вырабатываемый электронным имитатором I транспортного средства с учетом сигналов, поступивших из физических моделей тормозного механизма 7 и рулевого управления 11, поступает в анализатор 13 пространственного положения транспортного средства. В каждый момент времени к водителю поступает информация о состоянии транспортного средства в процессе торможения. Водитель, воспринимая информацию, анализирует ее, оценивает дорожно-транспортную ситуацию, прогнозирует возможные варианты ее развития и посредством органов управления изменяет имитируемое положение транспортного средства на дороге.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131146C1 |
| Способ обучения приемам управления четырехколесным внедорожным мототранспортным средством (квадроциклом) и тренажер для его реализации | 2024 |
|
RU2830015C1 |
| СПОСОБ ОБУЧЕНИЯ ВОЖДЕНИЮ БОЕВОГО ТРАНСПОРТНОГО СРЕДСТВА И ТРЕНАЖЕР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2709344C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| Тренажер транспортного средства | 1987 |
|
SU1508265A1 |
| Тренажер для водителей транспортных средств | 1983 |
|
SU1238135A1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ПСИХОФИЗИОЛОГИЧЕСКИХ ЭФФЕКТОВ В ТРЕНАЖЕРЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2369909C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ В СТАЦИОНАРНЫХ УСЛОВИЯХ ВРЕМЕНИ ЗРИТЕЛЬНО-МОТОРНОЙ РЕАКЦИИ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА НА ОПАСНЫЕ ДОРОЖНЫЕ СИТУАЦИИ | 2011 |
|
RU2475186C2 |
| Стенд для исследования тормозных свойств прицепов, оборудованных инерционной тормозной системой | 1990 |
|
SU1783346A1 |
| МНОГОФУНКЦИОНАЛЬНАЯ АВТОМОБИЛЬНАЯ СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ | 2011 |
|
RU2480356C2 |
| Стенд для испытания противоблокировочной системы транспортного средства | 1974 |
|
SU595650A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
