Изобретение относится к средствам передвижения, в частности к индивидуальным безмоторным транспортным средствам, у которых отсутствует какой-либо механизм для обеспечения движения, движение осуществляется исключительно физическим усилием человека.
Самокат - простое колесное транспортное средство, оборудованное рулем, приводимое в движение отталкиванием ногой от земли и не имеющее сидения.
В современном исполнении чаще всего представляет собой площадку для ног, или деку, с нескользящим покрытием наподобие материала шлифовальной шкурки, покоящуюся на двух колесах, расположенных одно за другим.
Также встречаются детские модели с тремя колесами. Спереди к платформе крепится вертикальная стойка-руль, как правило, регулируемая по высоте, с прорезиненными ручками. При езде водитель отталкивается одной ногой от земли, удерживая вторую на деке и держась за ручки.
Наиболее распространенным средством повышения ходовых качеств самокатов является использование усилий ног для создания крутящего момента на ведущем, чаще всего заднем колесе.
Известен самокат, включающий переднее управляемое колесо, рулевую колонку, раму, опорно-приводную площадку, заднее ведущее колесо (см. патент DE №Ю132497, В62М 1/04, 2003).
Самокат имеет простую схему передачи мощности на ходовое колесо, привод заднего колеса осуществляется от педалей, установленных на его опорной площадке. Опорно-приводная площадка выполнена в виде коромысла, которое шарнирно закреплено на раме и имеет поперечно-горизонтальную ось качания.
Недостатками данного устройства являются низкая эксплуатационная эффективность, необходимость строго определенной амплитуды движений ездока.
Водитель, находясь в позе широкого шага и держась за руль, вынужден раскачивать свой корпус по схеме вперед-назад и так далее, перенося тяжесть тела с одного плеча коромысла на другое.
Известен самокат, включающий рулевую колонку, переднее колесо, раму, опорно-приводные площадки, заднее колесо с обгонными муфтами в его втулке (см. патент RU №2329911, В62М 1/04, 2008).
Данное техническое решение направлено на увеличение составляющей рабочего хода в цикле возвратно-поступательного движения подстопных платформ, при этом использован принцип имитации ходьбы в гору. Причем ноги ездока расположены на опорно-приводящих площадках, скользящих по наклонной раме, кинематически связанных с ведущим задним колесом.
Недостатком данного самоката является небольшая величина полезной силы, равной небольшой части веса ездока в соответствии с принципом разложения сил на наклонной плоскости. Небольшая величина силы определяется небольшим углом наклона рамы самоката. Этим определены невысокие ходовые качества конструкции, например небольшая величина предельной скорости.
Известен также самопед педальный, содержащий раму, соединенную с ней рулевую вилку с рулем, переднее колесо, ведущее заднее колесо, установленное на приводной оси с парой обгонных муфт (см. патент RU№2373099, В62М 1/04, 2008).
В данном изобретении для повышения эффективности движения самоката используются движения ног ездока для передачи крутящего момента на ведущее заднее колесо, причем имитируется ходьба на месте. При этом ноги ездока располагаются на платформах, закрепленных на приводных рычагах, кинематически связанных с ведущим колесом.
Ходовые качества этой конструкции определяются предельной величиной полезной силы, которая, в свою очередь, определяется весом ездока. С учетом потерь на трение в трансмиссии эта величина может оказаться недостаточной для комфортной езды.
Известен также самокат, содержащий двухколесную снабженную площадкой для ступней тележку, переднее колесо, управляемое посредством руля, при этом переднее колесо имеет привод, состоящий из одного или двух функционально эквивалентных устройств, связанных с рулем (см. патент RU №2418708, В62М 1/00, 2011).
В каждом из эквивалентных устройств один конец приводного ремня связан с имеющим подвижность «вверх-вниз» от переднего колеса рулем самоката. Второй конец приводного ремня навивается на барабан, соединенный с ведущим звеном обгонной муфты, соединенной с осью колеса и одним из концов возвратной пружины, второй конец которой связан с вилкой или равнозначным ей элементом подвески колеса.
Рабочим ходом привода является движение руля на себя, в котором работает все тело ездока.
Недостатком известного устройства является наличие трения скольжения при возвратно-поступательном движении руля внутри рулевой колонки.
Известно, что наивысшей эффективностью работы подобных устройств является достижение максимальной скорости при минимальных усилиях ездока, что реализуется при прохождении линии действия полезной силы (здесь - сила вытягивания руля из рулевой колонки и направленная вдоль нее) примерно через середину стоп ног ездока.
В данном устройстве это условие не соблюдается, что, во-первых, требует дополнительных усилий от ездока в связи с неудобством положения, а во-вторых, вызовет неизбежные перекосы при перемещении руля внутри рулевой колонки, что увеличивает силу сопротивления (силу трения) при перемещении руля.
Также известно, что эффективность движения связана с передаточным отношением механизма. В данной конструкции оно ограничено соотношением диаметров барабана и переднего колеса, отсутствуют механизмы изменения передаточного отношения.
Наиболее близким по технической сущности к заявляемому решению является самокат, содержащий раму с подставкой для ног и рулевой колонкой, переднее управляемое приводное колесо и заднее колесо, привод (см. патент US №7360780, В62К 3/00, В62М 1/16, 2008).
Привод включает рулевую вилку, выполненную в виде поперечного по отношению к рулевой колонке рычага, один конец которого шарнирно закреплен на кронштейне, связанном с вилкой переднего колеса, а на другом, обращенном к ездоку, имеет рукоятки управления самокатом.
Для передачи крутящего момента на переднее колесо самокат снабжен передачей в виде расположенной вертикально бесконечной цепи, прикрепленной к рычагу и связывающей обгонную муфту на переднем колесе и ролик, закрепленный на кронштейне, на верху вилки переднего колеса.
Таким образом, рычаг с рукоятками управления несет две функции: является частью привода и рулем управления самоката.
Ездок, располагаясь на подставке, надавливая на рукоятки управления, поворачивает рычаг вокруг шарнира и смещает его вниз. Цепь, увлекаемая рычагом, передает переднему колесу через обгонную муфту крутящий момент, сообщая импульс движения самокату.
Недостатком данного изобретения является невысокая эффективность, вследствие того, что усилие, обеспечивающее импульс движения, ограничено лишь небольшой частью веса ездока, поскольку большая часть его приходится на подставку для ног.
Другим недостатком конструкции является его сложность, обусловленная кинематикой механизма, требующей перекрещивания ветвей цепи, что, в свою очередь, требует их разведения для предотвращения контакта при встречном их движении.
Работа цепной передачи в этих условиях существенно увеличивает нагрузку на нее, приведет к быстрому выходу из строя, а также потребует дополнительных усилий от ездока.
Также недостатком данного изобретения является низкая комфортность эксплуатации самоката, так как отсутствует механизм регулирования скорости движения, что существенно при движении по пересеченной местности.
Задачей заявляемого технического решения является создание транспортного средства, приводимого в движение мускульной силой человека, простого по конструкции, малого веса, надежного, удобного в эксплуатации, обеспечивающего возможность физического развития пользователя.
Технический результат заявляемого решения заключается в повышении эффективности движения устройства путем оптимизации соотношения скорости движения и затраченных усилий за счет компоновки элементов привода и возможности плавного регулирования скорости движения.
Для достижения указанного технического результата в самокате, содержащем раму с подставкой для ног и рулевой колонкой, переднее колесо с обгонной муфтой, заднее колесо, привод, включающий закрепленную на раме приводную траверсу с рукоятками управления, выполненную в виде поперечного по отношению к рулевой колонке рычага, шарнирно соединенного с вилкой переднего колеса в ее верхней части с возможностью вращения в вертикальной плоскости, совпадающей с плоскостью переднего колеса, при этом приводная траверса кинематически связана с обгонной муфтой гибкой связью, согласно предложению гибкая связь представляет собой незамкнутую цепь, один конец которой прикреплен к приводной траверсе с возможностью перемещения вдоль нее в пространстве между рукоятками управления и шарниром рулевой колонки, а другой конец закреплен с возможностью обратного вращения обгонной муфты и обратного перемещения цепи, а концы рукояток управления приводной траверсы пространственно расположены над серединой подставки для ног.
Согласно предложению, один конец цепи прикреплен к ползуну, расположенному на приводной траверсе между рукоятками управления и шарниром рулевой колонки, при этом ползун имеет выступ для крепления цепи, обеспечивающий ее расположение в плоскости обгонной муфты, причем ползун снабжен прижимным винтом с рукояткой для фиксации ползуна на приводной траверсе, которая имеет некруглое сечение, обеспечивающее отсутствие вращения ползуна вокруг оси траверсы.
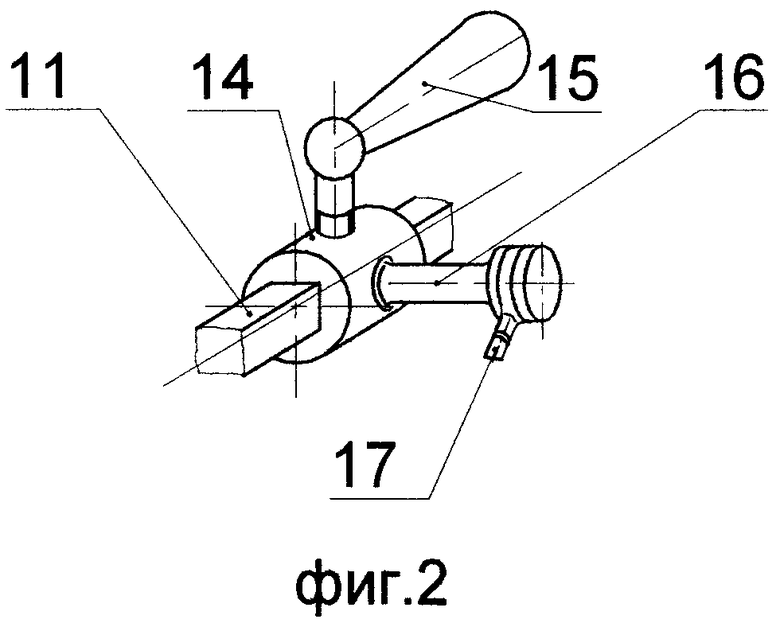
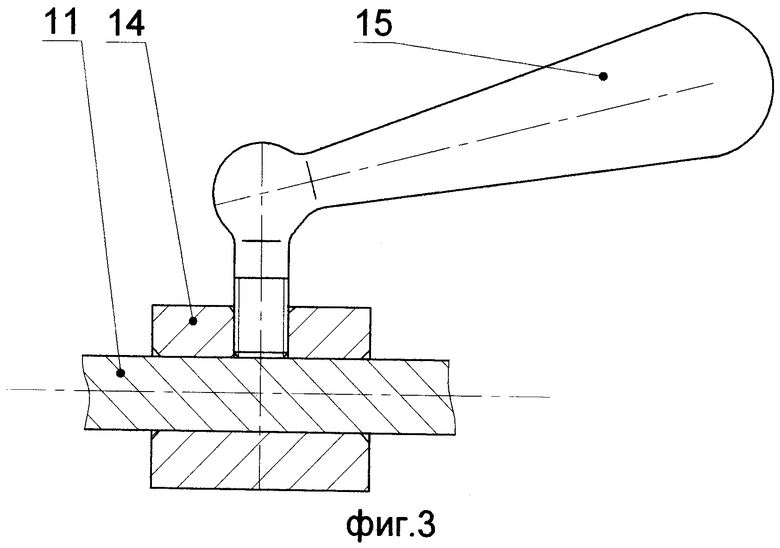
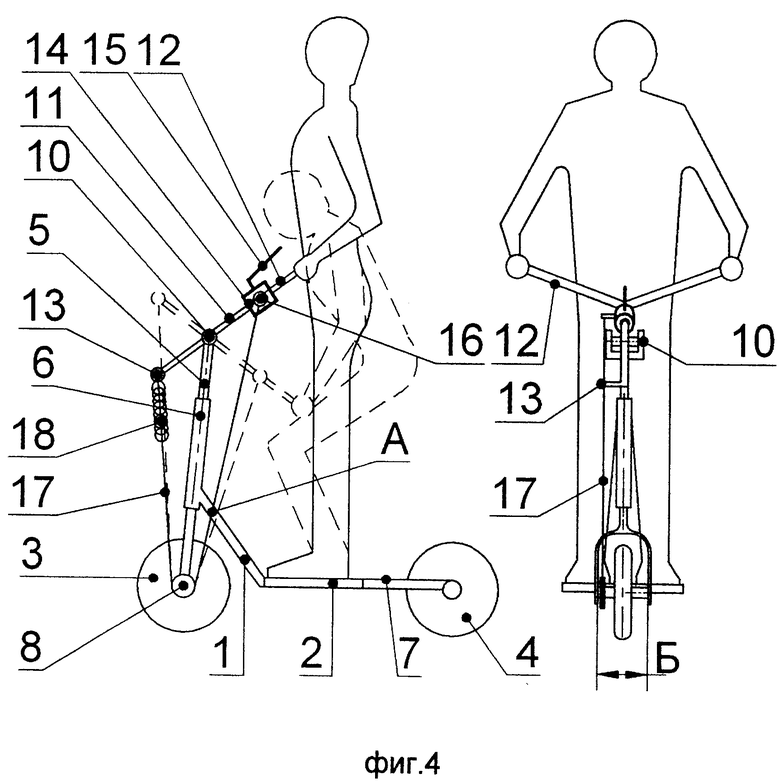
Сущность предложения поясняется чертежом, где на фиг.1 представлен общий вид самоката в пространственном изображении; на фиг.2 представлен внешний вид ползуна с прижимным винтом; на фиг.3 изображен частичный разрез приводной траверсы в месте установки ползуна; на фиг.4 схематично изображена работа устройства.
Следует учесть, что на чертеже представлены только те детали, которые необходимы для понимания существа предложения, а сопутствующее оборудование, хорошо известное специалистам в данной области, на чертеже не представлено.
Самокат включает стальную раму 1, подставку 2 для ног ездока, смонтированную на раме 1, управляемое приводное переднее колесо 3, заднее колесо 4 (фиг.1).
При этом рама 1 с одной стороны конструктивно связана с рулевой колонкой, содержащей вилку 5 переднего колеса 3, которая закреплена во втулке 6 с возможностью вращения вокруг своей оси. С другой стороны рама 1 также конструктивно связана с вилкой 7 заднего колеса 4.
В вилке 5 закреплено переднее колесо 3, а на вилке 7 закреплено заднее колесо 4. На переднем колесе 3 размещена обгонная муфта 8.
Верхний конец вилки 5 переднего колеса 3 снабжен шарниром 9 с горизонтально расположенной осью 10, на которой закреплена приводная траверса 11 рулевого управления с возможностью ее возвратно-вращательных движений (качания) в вертикальной плоскости, совпадающей с плоскостью переднего колеса 3.
Приводная траверса 11 выполнена в виде двуплечего рычага, на одном конце которого расположены рукоятки 12 для управления самокатом, а на другом конце приводной траверсы 11 выполнен выступ 13.
Причем концы рукояток 12 пространственно расположены над серединой подставки 2 для ног.
Между рукоятками 12 и шарниром 9 на приводной траверсе 11 расположен ползун 14, установленный с возможностью перемещения вдоль приводной траверсы 11. Ползун 14 имеет прижимной винт 15 с рукояткой для удобства вращения, предназначенный для фиксации ползуна 14 на приводной траверсе 11 (фиг.2).
Сбоку на ползуне 14 выполнен выступ 16, к которому прикреплен конец цепи 17, охватывающей звездочку обгонной муфты 8. К другому концу цепи 17 прикреплен амортизатор 18, другим своим концом прикрепленный к выступу 13 на противоположном конце приводной траверсы 11.
Приводная траверса 11 имеет некруглое сечение, обеспечивающее отсутствие вращения ползуна 14 вокруг оси траверсы.
Выступы 13 и 16 предназначены для улучшения работы цепи 17 путем смещения ее концов от плоскости обгонной муфты. Их величина равна величине смещения обгонной муфты относительно этой плоскости.
Устройство работает следующим образом.
Водитель, располагаясь обеими ногами на подставке 2, из крайнего нижнего положения распрямляется и, удерживая руками рукоятки 12, поднимает их, поворачивая приводную траверсу 11 вокруг оси 10, в верхнее положение (фиг.3). При этом вследствие натяжения цепи 17 происходит передача крутящего момента через обгонную муфту 8 на переднее колесо 3.
Далее водитель возвращается в нижнее (исходное) положение. В это время движение самоката происходит по инерции.
При этом приводная траверса 11 рулевого управления, цепь 17 и обгонная муфта 8 возвращаются в исходное положение вследствие перемещения выступа 13 (на конце приводной траверсы 11), увлекающего за собой амортизатор 18 с цепью 17, в верхнее положение.
Амортизатор 18, связывающий конец цепи 17 с выступом 13, обеспечивает постоянное натяжение цепи во всех фазах движения.
При езде водитель имеет возможность изменять скорость движения самоката путем изменения передаточного отношения привода. Для этого ему, в том числе и на ходу, достаточно поворотом ручки поперечного винта 15 ослабить затяжку ползуна 14 и переместить его вдоль приводной траверсы 11 в нужном направлении на нужную величину, после чего затянуть прижимной винт 15 и продолжать движение. Передаточное отношение привода изменяется в соответствии с изменением расстояния между шарниром 9 и ползуном 14.
Водитель выполняет повороты на самокате, вращая вилку 5 переднего колеса 3 вокруг оси рулевой колонки, перемещая влево или право приводную траверсу 11. Широко разведенные рукоятки 12 управления обеспечивают это движение.
При этом может иметь место ограничение угла поворота вследствие контакта цепи 17 с рамой 1 в точке А (фиг.3).
При необходимости угол поворота самоката может быть увеличен за счет увеличения ширины вилки 5 (размера Б) и смещения муфты 8 и цепи 17 в сторону ближнего конца вилки 5, то есть за счет увеличения зазора между цепью 17 и рамой 1 в точке А.
Возможно увеличение угла поворота самоката за счет смещения шарнира 9 вместе с приводной траверсой 11 вперед. В этом случае шарнир 9 размещен на кронштейне, закрепленном но вилке 5, а точка А смещается к рулевой колонке, что практически позволяет снять все ограничения с угла поворота.
Заявляемое техническое решение позволяет максимально эффективно использовать физические возможности человека. Для создания необходимого усилия используются практически все группы мышц: ног, мышцы тазобедренного сустава, туловища, рук, а не только одних ног, что характерно для большинства мускульных транспортных средств.
Активная фаза движения - разгибание ног, выпрямление туловища, сгибание рук - аналогичны движениям тяжелоатлета, поднимающего штангу. В момент отрыва штанги от помоста и при дальнейшем ее подъеме реализуются максимальные усилия, какие только возможны человеку.
Наличие пассивной фазы движения - движение по инерции в период обратного вращения приводной траверсы (перевод рукояток управления движения в нижнее положение) практически не сказывается на характере движения, так как время, необходимое для обратного вращения приводной траверсы, лежит в пределах 1,0-1,5 секунд.
Крепление конца цепи к ползуну на приводной траверсе позволяет достичь плавного регулирования скорости движения, что существенно влияет на комфортность движения по пересеченной местности в добавление к преимуществам использования всех групп мышц ездока.
Из изложенного следует, что заявляемая совокупность существенных признаков позволяет достичь указанного технического результата, а именно оптимизации соотношения скорости движения и затраченных усилий.
Изобретение относится к приводимому в движение мускульной силой человека транспортному средству. Самокат содержит раму с подставкой для ног и рулевой колонкой, переднее колесо с обгонной муфтой, заднее колесо, привод. Привод включает закрепленную на раме приводную траверсу с рукоятками управления, выполненную в виде поперечного по отношению к рулевой колонке рычага, шарнирно соединенного с вилкой переднего колеса в ее верхней части с возможностью вращения в вертикальной плоскости, совпадающей с плоскостью переднего колеса. Приводная траверса кинематически связана с обгонной муфтой гибкой связью, которая представляет собой незамкнутую цепь. Один конец цепи прикреплен к приводной траверсе с возможностью перемещения вдоль нее в пространстве между рукоятками управления и шарниром рулевой колонки. Другой конец цепи закреплен с возможностью обратного вращения обгонной муфты и обратного перемещения цепи. Достигается упрощение конструкции и повышение эффективности движения. 4 з.п. ф-лы, 4 ил.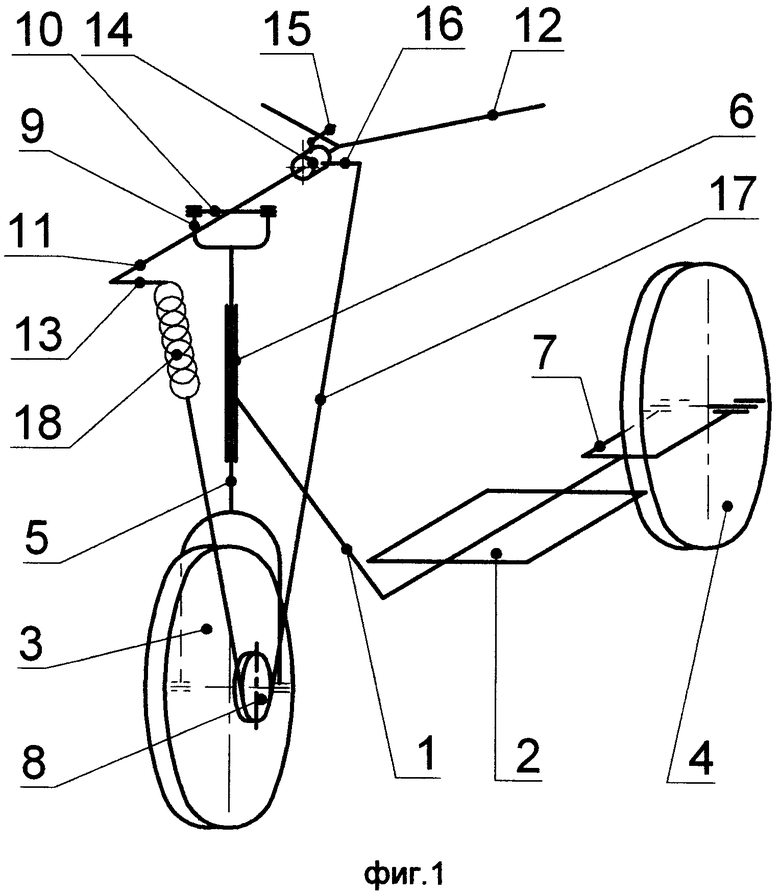
1. Самокат, содержащий раму с подставкой для ног и рулевой колонкой, переднее колесо с обгонной муфтой, заднее колесо, привод, включающий закрепленную на раме приводную траверсу с рукоятками управления, выполненную в виде поперечного по отношению к рулевой колонке рычага, шарнирно соединенного с вилкой переднего колеса в ее верхней части с возможностью вращения в вертикальной плоскости, совпадающей с плоскостью переднего колеса, при этом приводная траверса кинематически связана с обгонной муфтой гибкой связью, отличающийся тем, что гибкая связь представляет собой незамкнутую цепь, один конец которой прикреплен к приводной траверсе с возможностью перемещения вдоль нее в пространстве между рукоятками управления и шарниром рулевой колонки, другой конец закреплен с возможностью обратного вращения обгонной муфты и обратного перемещения цепи, а концы рукояток управления пространственно расположены над серединой подставки для ног.
2. Самокат по п.1, отличающийся тем, что один конец цепи прикреплен к ползуну, расположенному на приводной траверсе между рукоятками управления и шарниром рулевой колонки.
3. Самокат по п.1, отличающийся тем, что ползун имеет выступ для крепления цепи, обеспечивающий ее расположение в плоскости обгонной муфты.
4. Самокат по п.1, отличающийся тем, что ползун снабжен прижимным винтом с рукояткой для фиксации ползуна на приводной траверсе.
5. Самокат по п.1, отличающийся тем, что приводная траверса имеет некруглое сечение, обеспечивающее отсутствие вращения ползуна вокруг оси траверсы.
| US 7360780 B1, (TUCKER JOE W), 22.04.2008, реферат, фиг | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 6179307 B1, (MAO CHEN SHOU), 30.01.2001, описание, фиг | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 2002096855 B1, (LEE JUNG-TIEN), 25.07.2002, реферат, фиг | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 6311998 B1, (WANG LEAO, WU PETER), 06.11.2001, описание, фиг | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| САМОКАТ | 2006 |
|
RU2329911C2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

