Изобретение относится к транспортным средствам, для передвижения которых водители используют энергию своих мышц.
В этой области техники значительную нишу занимают велосипеды и самокаты. Изобретатели первых образцов этих машин передвигались на них при помощи своих ног, которыми отталкивались от земли. В дальнейшем велосипед был оснащен цепной передачей на заднее колесо, обгонной муфтой, тормозом, пневматическими шинами и другими устройствами, получил широкое распространение в мире и превратился в серьезное транспортное средство, тогда как самокат практически остался на уровне своей первоначальной схемы и, как правило, используется для детских забав.
В патентной печати имеется ряд предложений о приводе задних колес самокатов от различного рода педалей, установленных на его опорной площадке. Одно из таких устройств раскрыто в описании изобретения к патенту DE 10132497 A1 B62M 1/04. Самокат содержит переднее управляемое колесо, рулевую колонку, раму, опорно-приводную площадку и заднее ведущее колесо. Его опорно-приводная площадка выполнена в виде коромысла, которое шарнирно закреплено на раме и имеет поперечно-горизонтальную ось качания. На заднем плече коромысла устроена опорная площадка для спортсмена, на которой он может стоять обеими ногами, а переднее плечо представляет собой педаль, плоскость которой приподнята на угол около 25° и обращена назад. На заднем конце коромысла за опорной площадкой вертикально закреплен зубчатый сектор, входящий в зацепление с шестерней, которая установлена на одной оси с ведущим колесом и связана с ним через обгонную муфту велосипедного типа. Устройство работает следующим образом: спортсмен, стоящий на задней площадке, делает шаг вперед и переносит вес своего тела на педаль коромысла, отчего коромысло наклоняется вперед, заднее плечо с зубчатым сектором подымается вверх, вхолостую проворачивая шестерню, а при отступе спортсмена назад, на опорную площадку, коромысло возвращается в исходное положение, при этом зубчатый сектор проворачивает шестерню, уже сцепленную с ведущим колесом, в нужную для движения сторону. Далее рабочий цикл повторяется.
Этот самокат имеет простую и эффективную схему передачи мощности на ходовое колесо, но для езды на расстояние, допустим, 10 километров его использование можно поставить под вопрос, так как движения человека, которые он в таких количествах должен будет совершить, нельзя считать рациональными и естественными. Спортсмен, находясь в позе широкого шага и держась за руль, вынужден раскачивать свой корпус по схеме вперед-назад и так далее, перенося тяжесть тела с одного плеча коромысла на другое. Подобные монотонные раскачивания не применяются в спорте и трудовой деятельности человека, возможно потому, что в таких случаях быстро устают глазные мышцы, которые рефлекторно перефокусируют хрусталик глаза вслед за изменением расстояния до объекта наблюдения. К недостаткам этого самоката следует отнести и тот факт, что тяговое усилие на его ведущем колесе возникает периодически, занимая не более половины времени рабочего цикла.
Патент ЕР 1256363 А63С 17/12 выдан на самокат, в конструкцию которого включены: рулевая колонка, переднее колесо, рама, опорно-приводная площадка, ведущее заднее колесо. Самокат оборудован приводом на ведущее заднее колесо от качающегося в продольно-вертикальной плоскости коромысла, которое шарнирно связано с рамой и имеет две симметрично расположенные педали - переднюю и заднюю. На раме самоката помимо коромысла жестко закреплен блок шестерен, сцепленных друг с другом в следующей последовательности: большая передняя шестерня сцеплена с большой задней, а эта в свою очередь - с малой шестерней. Малая шестерня посажена на вал, на другом конце которого установлена ведущая звездочка, связанная цепным контуром с ведомой звездочкой, закрепленной на втулке заднего колеса. На валах передней и задней больших шестерен установлены храповые устройства с кривошипами, которые соединены при помощи шатунов с передней и задней педалями коромысла. Такая схема соединения звеньев механизма привода позволяет при смене направления качания коромысла приводить во вращение малую шестерню в одну и ту же сторону, что вызывает практически постоянную тягу на ходовом колесе самоката, в отличие от пульсирующего режима работы предыдущего аналога. Однако считать этот самокат серьезным транспортным средством можно только с большой натяжкой по причине описанных выше неудобных движений ездока при продольном раскачивании коромысла, а также по причине больших потерь мощности при ее передаче на ведущее колесо. Трансмиссия этого самоката включает пять шарниров, три вала, два храповика, три зубчатые и одну цепную передачи, что по многозвенности в два раза превышает схему, например, дорожного велосипеда.
Известно устройство, раскрытое в FR 748137 A, 29/06/1933, ЕС Class: B62K 3/00, В62М 1/04/. Самокат содержит переднее управляемое колесо, рулевую колонку, продольную раму, опорно-приводную площадку, заднее ведущее колесо. Опорно-приводная площадка включает в себя две педали, сориентированные вдоль самоката и размещенные справа и слева от его продольной оси. Задние обрезы педалей соединены с поперечно-горизонтальным валом, вращающимся на высокой приводной стойке. На валу установлены два силовых рычага, связанные с двумя приводными цепями, которые охватывают правую и левую ведомые звездочки, закрепленные на клиновых сердечниках обгонных муфт ведущего колеса. Свободные концы цепей подтянуты пружинами к приводной стойке. Под воздействием пружин педали в исходном положении зависают над поверхностью опорно-приводной площадки. Для начала движения самоката достаточно перенести вес тела на одну из педалей.
По признакам использования в этой конструкции двусторонних обгонных муфт и цепных контуров данный аналог можно считать наиболее близким к заявленному самокату.
Существенный недостаток указанного аналога был выявлен заявителем осенью 2005 года при испытании подобного устройства. Следует заметить, что во многих техниках движения - ходьба, бег, езда на велосипеде - одна нога воздействует на опору, а другая в то же время переносится в исходную для этого позицию. При езде на описанном самокате такая последовательность оказалась нарушенной. Здесь спортсмен стоит, скажем, на левой педали, а правой ногой совершает подъем и опускание педали справа. Далее следует короткая фаза простого стояния на двух педалях. Потом можно начинать подъем или левой, или снова правой педали. Практически, если не считать усталости, удобнее работать одной и той же ногой с одной и той же педалью. При этом в любом случае получается сугубо пульсирующий режим передачи мощности, где рабочий ход занимает не более 40% времени цикла. Это обстоятельство не позволяет развивать скорость более 12 км в час и затрудняет преодоление подъемов дороги. Режим же езды, когда сопротивление педали при рабочем ходе будет равно весу спортсмена, и он смог бы оторвать от площадки опорную ногу, практически бывает только в самом начале разгона. Конструкция заявленного самоката предполагает решение задачи по созданию транспортного средства, сохраняющего признаки самоката, но по скорости и легкости езды приближающегося к характеристикам дорожного велосипеда за счет рационального использования физических возможностей человека.
Достижение указанного технического результата обеспечивается тем, что самокат, содержащий рулевую колонку, переднее управляемое колесо, продольную раму, опорно-приводную площадку, ведущее заднее колесо с правой и левой обгонными муфтами в его втулке, с двумя звездочками, закрепленными на сердечниках обгонных муфт, и двумя цепными приводными контурами, отличается от аналогов тем, что его опорно-приводная площадка содержит две продольные симметрично расположенные относительно оси самоката направляющие, каждая из которых состоит из беговой дорожки, двух Г-образных бортов и двух концевых упоров. По направляющим имеют возможность возвратно-поступательно двигаться подстопные платформы, каждая из которых соединена посредством толкающей штанги с нижней ветвью двухосевого цепного контура, одна из звездочек которого закреплена на клиновом сердечнике обгонной муфты ведущего колеса самоката. Толкающие штанги упругой связью подтянуты к передней кромке опорно-приводной площадки, что обеспечивает возврат подстопных платформ в исходное положение после рабочего хода. При этом рулевая колонка соединена с рамой самоката посредством цилиндрического шарнира с поперечно-горизонтальной осью вращения, что дает возможность спортсмену силовым воздействием на руль изменять угловое положение рулевой колонки относительно рамы самоката в продольно-вертикальной плоскости. Последнее обстоятельство позволяет спортсмену выбирать наклон собственного корпуса и угол упора ног в подстопные платформы в зависимости от сопротивления движению самоката.
Первый отличительный признак самоката - устройство его опорно-приводной площадки, которое дает возможность водителю-спортсмену использовать техники пешего хода, бега трусцой или классического лыжного бега для привода ведущего колеса самоката.
Второе отличие самоката от ближайшего аналога заключается в шарнирном соединении рамы и рулевой колонки самоката, что создает своеобразный эффект толкания руля: чем сильнее спортсмен отталкивает от себя руль, тем больше и выгоднее по направлению сила его воздействия на подстопные платформы.
Устройство самоката показано на следующих фигурах:
фиг.1 - общий вид самоката сбоку;
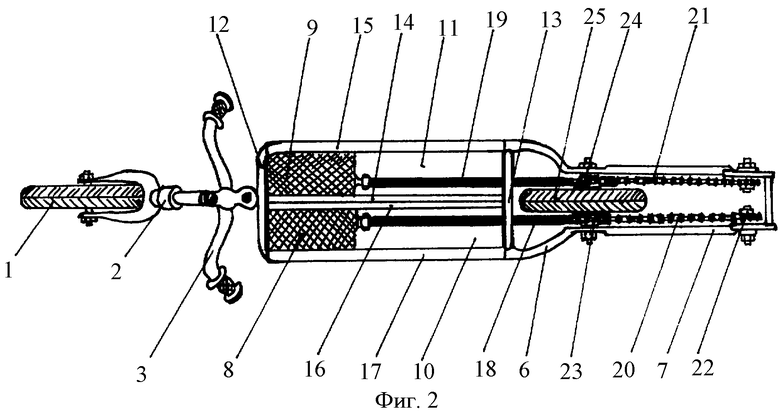
фиг.2 - общий вид самоката сверху.
Рулевая колонка самоката опирается на управляемое колесо 1 и помимо других частей включает в себя руль 3 и корпус подшипников 2 с поводком 4. Рама самоката соединена с поводком 4 посредством цилиндрического шарнира 5. Рама изготовлена из трубы, замкнутой в единый контур, из которого выделяется широкая несущая часть 6 спереди и узкая задняя часть 7 для цепных приводов. На несущей части рамы 6 установлены две продольные направляющие для двух четырехколесных подстопных платформ 8 и 9. Направляющие содержат плоские беговые дорожки 10 и 11, ограниченные передним 12 и задним 13 концевыми упорами, а также четырьмя г-образного профиля бортами: 14 и 15 для правой дорожки, 16 и 17 - для левой (на фиг.1 борт 17 условно снят). Подстопные платформы 8 и 9 соединены штангами 18 и 19 с нижними ветвями двух цепных контуров 20 и 21. В левый цепной приводной контур входят натяжная звездочка 22 и ведомая звездочка 23, которая соединена с левой обгонной муфтой ведущего колеса 25. С правой стороны самоката цепной приводной контур выполнен как зеркальное отражение описанного левого. Для подачи платформы 8 в верхнее исходное положение под опорно-приводной площадкой установлена пружина 27, связанная тросом 26 с задним концом толкающей штанги 18. Аналогичное устройство выполнено для подачи в исходное положение платформы 9.
Для начала езды на самокате достаточно взять его за руль с левой стороны, поставить правую ногу на правую подстопную платформу, оттолкнуться от земли левой ногой, перенести вес тела на правую ногу, выпрямиться и поставить левую ногу на соответствующую платформу. Под действием вашего веса правая платформа 9 пойдет назад-вниз, толкающая штанга 19 приведет в движение нижнюю ветвь цепного контура 21, ведомая звездочка 24 через левую обгонную муфту придаст вращение ведущему колесу 25. В момент контакта платформы с задним концевым упором 13 спортсмен переносит вес тела на левую ногу, включая в работу левую половину механизма привода, а правая нога начинает движение вперед-вверх вместе с платформой в исходное положение. Для ускорения разгона или преодоления, скажем, встречного ветра спортсмен может навалиться на руль, толкая его вперед, что само по себе реактивно увеличивает силу, приложенную к платформам в обратном направлении. При достижении усилия на руль определенной величины последний уходит вперед, рулевая колонка поворачивается в шарнире 5 до упора, переднее колесо 1 подкатывается под раму, а крутизна беговых дорожек в направлении назад возрастает. При этом тело спортсмена получает больший наклон вперед, отчего увеличивается составляющая его воздействия на платформы по направлению их движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОКАТ | 2012 |
|
RU2520634C1 |
| САМОПЕД | 2007 |
|
RU2373099C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
| Индивидуальное транспортное средство | 2016 |
|
RU2656802C2 |
| САМОКАТ | 2016 |
|
RU2658234C2 |
| ВЕЛОМОБИЛЬ-САМОКАТ МАМЫРИНА | 1992 |
|
RU2022864C1 |
| САМОКАТ-ЭКИПАЖ | 2002 |
|
RU2228279C2 |
| Транспортное средство с мускульным приводом | 1986 |
|
SU1311996A1 |
| ЛЕГКОВОЙ ВЕЛОМОБИЛЬ, ПРИВОДИМЫЙ В ДВИЖЕНИЕ МУСКУЛЬНОЙ СИЛОЙ НОГ, СПИНЫ, РУК, ВЕСОМ ВОДИТЕЛЯ И ГРУЗА | 1996 |
|
RU2124450C1 |
| МОНОГУСЕНИЦА | 2022 |
|
RU2779126C1 |
Изобретение относится к двухколесным средствам без седла. Самокат содержит опорно-приводную площадку с двумя направляющими, вдоль каждой из которых может перемещаться соответствующая подстопная платформа (8), которая связана толкающей штангой (18) с нижней ветвью соответствующего цепного приводного контура (20). При этом холостой ход платформы (8) обеспечивается посредством упругого элемента в виде пружины (27). Рулевая колонка соединена с рамой при помощи цилиндрического шарнира (5) с поперечно-горизонтальной осью вращения для изменения наклона площадки с направляющими. Техническое решение направлено на увеличение составляющей рабочего хода в цикле возвратно-поступательного движения подстопных платформ. 2 ил.
Самокат, содержащий рулевую колонку, переднее управляемое колесо, продольную раму, опорно-приводную площадку, ведущее заднее колесо с правой и левой обгонными муфтами в его втулке, с двумя ведомыми звездочками и двумя цепными приводными контурами, отличающийся тем, что его опорно-приводная площадка состоит из двух направляющих, симметрично расположенных справа и слева от продольной оси самоката и несущих на себе две подстопные платформы, каждая из которых имеет возможность независимо от другой совершать возвратно-поступательные движения по своей направляющей, будучи связанной посредством толкающей штанги с нижней ветвью одного из двух цепных приводных контуров, при этом холостой ход каждой из платформ обеспечивается за счет энергии возвратного упругого элемента, а рулевая колонка соединена с рамой при помощи цилиндрического шарнира с поперечно-горизонтальной осью вращения и заданным сектором поворота.
| DE 19757358 A1, 24.06.1999 | |||
| US 6698779 B2, 02.03.2004 | |||
| Чувствительный элемент термоэлектрического термометра для измерения температуры поверхности | 1976 |
|
SU741072A1 |
| US 4334695 A, 15.06.1982 | |||
| DE 202006005456 U, 14.06.2006 | |||
| ПЕДАЛЬНЫЙ ПРИВОД | 2003 |
|
RU2274576C2 |

