Изобретение относится к методу регистрации яркостных точек (зеркальное отражение от объективов) и может быть использовано в способах засечки лесных пожаров, в оптических способах регистрации огня F42C 13/04, методах оценки мест дислокации снайперов, при защите бронетанковой техники путем введения операций подавления противотанковых ракетных комплексов (ПТРК), расположенных на дальностях, превышающих радиус существующих активных методов защиты бронетехники (класс МПК F41H 007/02, F41G 003/22).
Известен способ защиты бронетанковой техники, который основан на введении в бронетанковую колону боевой машины поддержки и защиты танков (БМПТ), который представлен в описании http://www.vk.mesi.ru/arms2112_2.html. По данному способу защиты бронетанковой техники БМПТ:
- оснащают многоканальным вооружением, позволяющим подавлять и уничтожать одновременно большое количество целей, включая живую силу противника, оснащенную гранатометами, ликвидировать бронированную технику в радиусе действия средств поражения, а также отражать атаки вертолетов и низколетящих самолетов, в том числе при массовом нападении такой техники противника на танковую колонну;
- укрепляют броню по критерию эффективность защиты бронетанковой техники-стоимость-маневренность;
- регистрируют объекты в зоне поражения за счет использования известных радиооптических методов;
- нейтрализуют обнаруженные объекты поражения.
Кроме отмеченных операций вводят операции автоматического пожаротушения, а также используют методы защиты бронетанковой техники от оружия массового поражения (операция защиты от ядерных боеприпасов).
Однако по данному способу защита колон нейтрализация воздушных и наземных средств поражения танка возможна лишь для случая ближнего боя и с определенной вероятностью выполнения поставленной задачи. Если средства нападения типа ПТРК изготавливаются по технологии «Стелз», имеют большой радиус поражения, превышающий радиус действия огневых систем защиты танка, используют тандемные боевые части, подкалиберные боеприпасы, задействуют нестандартные технологии встречи, обеспечивают массовый обстрел, высокий темп стрельбы со стороны противника, то вероятность описываемого способа защиты и нейтрализации существенно снижается.
В рассматриваемом способе по этому варианту нет решений подавления кассетных ПТРК, расположенных на большом удалении от бронетанковой колоны.
Для решения этих проблем и устранения отмеченных недостатков необходим способ оценки и засечки координат мест дислокации удаленных ПТРК и оригинальные методы «зачистки» пути продвижения танковой колоны еще до момента ее вхождения в зону действия дальнобойных высокоэффективных ПТРК.
Известен способ защиты бронетанковой техники http://www.vk.mesi.ru/arms2112 5.html, по которому для защиты колоны бронетанковой техники вводят предварительные операции разведки, реализуемые специализированной бронемашиной. За счет операции разведки пеленгуют средства подавления танковых колон, регистрируют координаты и передают их на командный пункт (КП) для последующего уничтожения (нейтрализации). Реализация такого способа отображена в описании боевой разведывательной машине БРМ-3 "Рысь", которая предназначена для проведения специальных операций днем и ночью, в любое время года и при любой погоде, на относительно большом удалении от своих войск.
Однако из-за относительно невысокой скорости обзора пространства впереди продвигающейся колоны и при массовом обстреле разведывательной машины зарубежными комплексами типа ПТРК, имеющими малую ЭПР, все преимущества бронетехники падают. Поэтому к недостаткам известного способа следует отнести:
- большое время засечки огневых точек, которое определяется относительно низкой скоростью продвижения разведывательной машины, и соответственно низкая эффективность подавления современных удаленных ПТРК;
- отсутствие возможности проведения операций засечки координат снайперов, оптических прицелов и систем наведении высокоэффективных замаскированных средств вооружения в дневное время при солнечных засветках;
- нет возможности ускоренной разведки с верхней полусферы, в том числе на большом удалении от разведывательных летательных аппаратов.
Известен способ защиты бронетанковой техники, основанный на подавлении или изменении траектории подлетающих боеприпасов, в том числе и ПТРК, который реализован в танковом комплексе КАЗ "Арена"-http://www. vk.mesi.ru/arms2113.html. В рассматриваемом способе обнаруживают по всем траекториям подлета на расстоянии 50 м от танка атакующие с земли или с воздуха средства поражения - [http://www.vk.mesi.ru/arms2ll3.html]. После обнаружения проводят первичную селекцию подлетающей цели, т.е. определяют траекторию ее движения (вне зависимости от того, управляемый это снаряд или что-то другое.). Если цель представляет угрозу для танка, в расчетный момент времени отстреливается защитный элемент, затем следует команда на его подрыв. Локализованный поток поражает цель на расстоянии от 3 до 6 метров от танка в зависимости от направления ее подхода. На перезарядку комплекса экипажу требуется около 15 минут.
По описанному способу "Арена" успешно борется с любыми единичными типами противотанковых управляемых средств, в том числе с самыми современными. Оснащение танка комплексом активной защиты повышает его боевую эффективность в зависимости от условий боевых действий от 2 до 3-4 раз.
Недостатком этого способа является низкая эффективность защиты колон бронетанковой техники, связанная с большим временем готовности комплекса защиты. Это особенно проявляется при массовом обстреле атакующей колонны кассетными тандемными снарядами ПТРК и др., в том числе ложными боеприпасами в условиях массового обстрела.
Известен способ защиты бронетанковой техники http://www.vk.mesi.ru/arms2121.html - прототип, по которому в нормальных беспомеховых условиях операции защиты бронетанковой техники реализуют в следующем порядке:
- обнаруживают с высоты, например, с помощью дистанционно-пилотируемого летательного аппарата - ДПЛА по оптико- радио излучению, т.е. в по уровню отраженного сигнала (эффективная поверхность рассеяния - ЭПР) и по геометрическим параметрам (протяженность, объем, высота), определенные относительно крупные объекты - танки, самоходки, грузовики и др.);
- распознают выделенные объекты и фиксируют их координаты;
- передают информацию в наземный пункт дистанционного управления (НПДУ), где происходит автоматическое определение его координат по сигналу от летательного аппарата (ЛА);
- эти данные тут же передаются на командный пункт, производящий в автоматическом режиме расчет установок и огневое поражение цели.
Важной особенностью способа является наличие возможности проведения таких операций как:
- круговой облет над обнаруженной целью;
- корректировка траектории поражающих боеприпасов (при этом направление и сила ветра автоматически учитываются в вырабатываемых на борту командах управления, что позволяет удерживать аппарат точно на заданной траектории полета);
- фиксация поражения цели.
Недостатками способа-прототипа являются:
- низкая уровень защиты бронетанковой техники, обусловленный малой достоверностью способа регистрации малоразмерных противотанковых ракетных комплексов - ПТРК, имеющих малую эффективную поверхность рассеяния - ЭПР, которая особенно проявляется при наличии аэрозольных помех и при наличии вводимых операций маскировки ПТРК;
- неудовлетворительный исход операции оптической разведки в ИК диапазоне, обусловленный влиянием солнечных засветок и аэрозольных помех особенно при широкодиапазонной селекции, связанной с низкой помехозащищенностью операции обнаружения с летательного аппарата;
- малые значения ЭПР в условиях применения радио и оптико-поглощающих материалов и наличие затухания излучения на трассе подсвета резко снижают вероятность обнаружения в существующих традиционных методах регистрации, особенно при наличии аэрозольных помех естественного и искусственного происхождения;
- низкая вероятность регистрации и нейтрализации ПТРК, обусловленная применяемыми вертикальными углами обзора подстилающей поверхности и ограниченными возможностями предлагаемой операции селекции яркостных точек (операции переотражения от объективов ПТРК).
Задачей предлагаемого изобретения является повышение уровня защиты бронетанковой техники, достоверности обнаружения и повышение вероятности нейтрализации противотанковых комплексов противника, имеющих малую эффективную поверхность рассеяния и расположенных на большом удалении от наступательного вооружения, повышение помехозащиты оптических систем обнаружения летательного аппарата и обеспечение их инвариантности к аэрозольным помехам.
Поставленная задача в заявляемом способе достигается тем, что в известном способе защиты бронетанковой техники, в котором с защищаемого объекта выпускают дистанционно пилотируемый летательный аппарат, с которого по тепловому ИК излучению и в активном режиме радиодиапазона обнаруживают и распознают объект противника, передают информацию на космическую систему или в наземный пункт дистанционного управления, где автоматически по излучению с летательного аппарата определяют координаты поражаемого объекта, передают на командный пункт, производящий в автоматическом режиме расчет установок, и последующее огневое поражение цели, вводят операцию бреющего полета, осуществляют горизонтальный подсвет в режиме пикосекундного диапазона излучения, вобуляцию периода излучения с синхронным стробированием приемного тракта, осуществляют выравнивание чувствительности по дальности лоцирования, адаптацию к фону и компенсацию помехи на селектируемом участке, компенсируют затухание на трассе, обеспечивая инвариантность метода к аэрозольным помехам, регистрируют координаты яркостных точек по местоположению летательного аппарата в момент его непосредственного бреющего прохода над регистрируемым объектом.
Предлагаемый способ рассмотрим на примере работы устройства, структурная схема которого реализует заявляемый способ защиты бронетанковой техники.
На фиг.1 приведена структурная схема устройства (система) ближнего действия, реализующего предлагаемый способ.
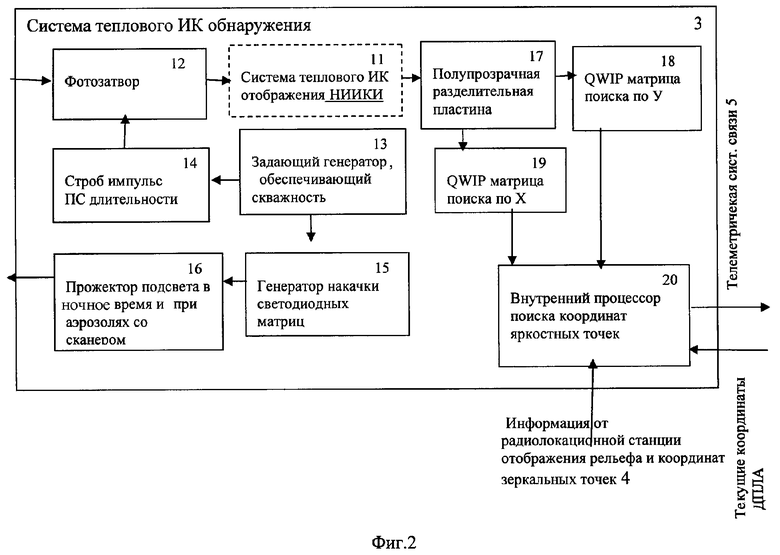
На фиг.2 приведена развернутая схема устройства (система) теплового ИК обнаружения.
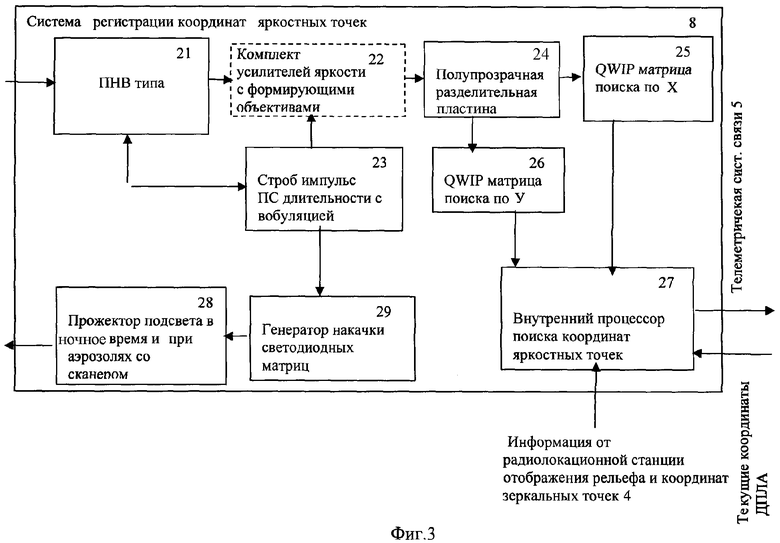
На фиг.3 приведена структурная схема устройства (система) регистрации координат яркостных точек.
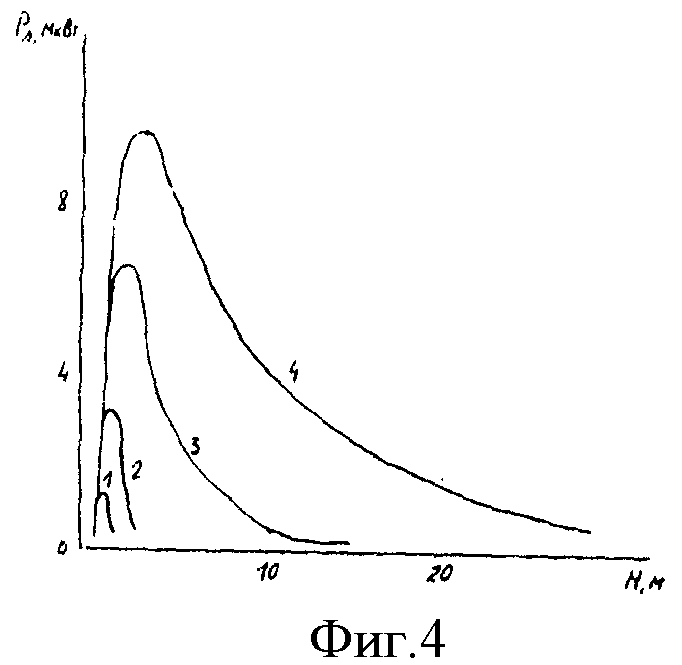
На фиг.4 распределение помехового сигнала по дальности: 1-τu=0,5 нс; 2-τu=2 нс; 3-τu=10 нс; 4-τu=50 нс; Н*=2 м; Gs=0,4 м-1.
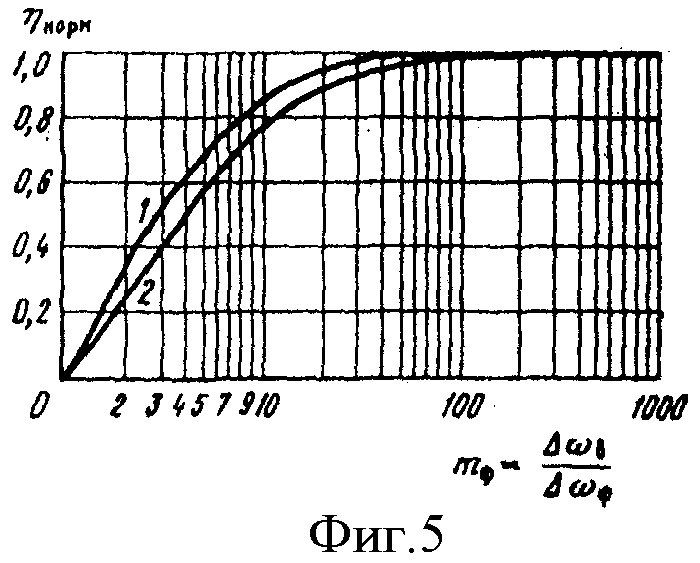
На фиг.5 изменение энергии сигнала в зависимости от mф для колоколообразного (1) и прямоугольного (2) импульсов.
Устройство (система) защиты бронетанковой техники (фиг.1) содержит:
1 - дистанционно пилотируемый летательный аппарат (ДПЛА);
2 - противотанковый ракетный комплекс (ПТРК);
3 - система теплового ИК обнаружения;
4 - радиолокационная станция отображения рельефа;
5 - система связи с наземным пунктом;
6 - наземный пункт дистанционного управления огнем;
7 - система огневого поражения;
8 - активная система регистрации координат объектов на земле;
9 - бортовая система разового огневого поражения;
10 - комплексный бортовой процессор.
Устройство теплового ИК обнаружения (фиг.2) содержит:
11 - система теплового ИК отображения;
12 - фотозатвор с изменяющимся углом обзора;
13 - задающий генератор, обеспечивающий изменение скважности и вобуляцию периода;
14 - строб-импульс пикосекундной длительности;
15 - генератор накачки светодиодных матриц;
16 - прожектор подсвета в ночное время и при аэрозолях;
17 - полупрозрачная разделительная пластина;
18 - QWIP матрица поиска по У;
19 - QWIP матрица поиска по X;
20 - внутренний процессор регистрации координат контрастных точек.
Устройство (система) регистрации координат яркостных точек (фиг.3) содержит:
21 - прибор ночного видения - высокочувствительный, стробируемый ПНВ, не зависящий от солнечного фона типа ЭП62Г 21,
22 - комплект усилителей яркости с формирующими объективами типа УПЗС-021 и 023;
23 - строб-импульс пикосекундной (ПС) длительности с вобуляцией;
24 - полупрозрачная разделительная пластина;
25 - QWIP матрица поиска по X;
26 - QWIP матрица поиска по У;
27 - внутренний процессор поиска координат яркостных точек;
28 - прожектор подсвета в ночное время и при аэрозолях со сканером;
29 - генератор накачки светодиодных матриц.
На фиг.1 блоки находятся в следующей взаимосвязи.
Система теплового ИК обнаружения 3 и радиолокационная станция отображения рельефа 4 посредством оптического и радио излучений соединены с противотанковым ракетным комплексом (ПТРК) 2. К выходу системы теплового ИК обнаружения 3 последовательно подключены телеметрическая система связи 5, наземный пункт дистанционного управления огнем 6, система огневого поражения 7. К управляемым входам телеметрической системы связи 5 подключены радиолокационная станция отображения рельефа 4, активная система регистрации координат яркостных точек 8, комплексный бортовой процессор 10, второй выход которого соединен с управляемым входом радиолокационной станции отображения рельефа 4 и активной системы регистрации координат яркостных точек 8, а ее выход последовательно соединен с бортовой системой разового огневого поражения 9 и противотанковым ракетным комплексом 2. Отмеченные блоки фиг.1 установлены в дистанционно пилотируемом летательном аппарате (ДПЛА) 1.
На фиг.2 - устройство (система) теплового ИК обнаружения; блоки находятся в следующей взаимосвязи.
К выходу фотозатвора 12 с изменяющимся углом обзора последовательно подключены система теплового ИК отображения 11, полупрозрачная разделительная пластина 17, QWIP матрица поиска по У 18, внутренний процессор регистрации координат контрастных точек 20. К управляемому входу фотозатвора 12 последовательно подключены строб-импульс пикосекундной длительности 14, задающий генератор, обеспечивающий изменение скважности и вобуляцию периода 13, генератор накачки светодиодных матриц 15, прожектор подсвета в ночное время и при аэрозолях 16, QWIP матрица поиска по X 19 по ходу соединена с полупрозрачной разделительной пластиной 17, а выход матрицы подключен ко второму входу внутреннего процессора регистрации координат контрастных точек 20.
На фиг.3 - структурная схема устройства (система) регистрации координат яркостных точек; блоки находятся в следующей взаимосвязи.
Последовательно соединены прибор ночного видения ПНВ 21, комплект усилителей яркости с формирующими объективами 22, полупрозрачная разделительная пластина 24, QWIP матрица поиска по Х 25, внутренний процессор поиска координат яркостных точек 27. К управляемому входу ПНВ 21 последовательно подключен строб-импульс пикосекундной (ПС) длительности с вобуляцией 23, генератор накачки светодиодных матриц 29, прожектор подсвета в ночное время и при аэрозолях со сканером 28. Второй выход полупрозрачной разделительной пластины 24 соединен QWIP матрицей поиска по Х 25, выход которой соединен со вторым входом внутреннего процессора поиска координат яркостных точек 27. Выход строб-импульса пикосекундной (ПС) длительности с вобуляцией 23 соединен с управляемым входом комплекта усилителей яркости с формирующими объективами типа УПЗС-021.
На фиг.1 в качестве дистанционно-пилотируемого летательного аппарата (ДПЛА) -1 используют отечественный серийно выпускаемый прибор типа Пчела 1T, тактико-технические характеристики которого описаны:
http://po-russkv.ru/big_image/img 104n0.html
http://www.yak.ru/PROD/current_rpv.php
http://www.chelindustry.ru/view2.php?rr=l&idd=145
http://www.airshow.ru/expo/658/prod_482_r.htm.
Примером реализации блока 2 - объекта поражения являются наиболее современные ПТРК, представленные в материалах:
http://www.npo-sm.ru/mag/2063.html Защита и безопасность // Военно-политический и научно-технический журнал, N2, 2006, Противодействие терроризму
НВО 1999-09-24: http://armor.kiev.ua/ptur/dz/era-nvo.html
http://armor.kiev.ua/ptur/armor/rastl.html
http://www.new-factoria.ru/missile/wobb/hellfire2/hellfire2.shtm]
http://armor.kiev.ua/ptur/armor/tankroofs.html
Систему теплового ИК обнаружения 3 выполняют на основе авиационной многоспектральной сканирующей пассивной оптико-электронной системы съемки типа сканера "ЭТНА-М" (http://www.niiki.ru/pages/n-r-op-etna.html)- государственное унитарное предприятие федеральный научно-производственный центр "Научно-исследовательский институт комплексных испытаний оптико-электронных приборов и систем"_(НИИКИ ОЭП), реализуют операции стробирования и поиска яркостных точек с помощью шагового двигателя, а также устанавливают переотражающую пластину на входе для установки угла обзора подстилающей поверхности, например, с углом порядка 45 градусов в момент поиска яркостных точек (отражение от оптических объективов систем подсвета ПТРК, прицелов гаубиц, снайперов и т.д.).
Радиолокационную станцию отображения рельефа 4 реализуют на базе когерентно-импульсных систем дальнометрии с внутренней когерентностью и ЛЧМ модуляцией (стр.641 В.Е.Дулевич и др. Теоретические основы радиолокации. - М.: Сов. радио, 1964, 732 с.) с обеспечением поперечного сканирования с определенным углом визирования подстилающей поверхности, что позволяет измерять две ортогональные составляющие: наклонную дальность, высоту и доплеровскую составляющую и соответственно фиксировать на земле объекты с зеркальным отражением, например танки, машины, ПТР и др., а также проводить относительно высокоточные измерения высоты полета и с определенной невысокой вероятностью фиксировать координаты зеркальных точек за счет использования эффекта сжатия принятого сигнала с ЛЧМ, анализа доплеровской составляющей и амплитуды сигнала, а также фиксировать координаты и относительную скорость перемещения наземных объектов с большим ЭПР.
Система связи с наземным пунктом 5 использует малогабаритный радиопередатчик ТО-1 [Проспект фирмы ЭВС, Россия, 1995; http://www.vimi.ru/applphys/appl-99/99-2/99-2-25r.htm.] / Это активно-импульсный переносной телевизионный прибор наблюдения с дистанционной передачей изображения [Государственное унитарное дочернее предприятие «Специальное конструкторское бюро техники ночного видения», Москва, Россия; Волков В.Г., Кощавцев Н.Ф. Комбинированный переносной оптико-электронный прибор наблюдения //Вопросы оборонной техники. Сер. 11, 1997. Вып.1(152)-2(153). С.34-36], который выполнен в малогабаритном корпусе со встроенной антенной, периодически передает в эфир частотные извещения, в том числе о наличии яркостных обнаруженных точках и получении информации о текущих координатах ДПЛА.
Наземный пункт дистанционного управления огнем 6 реализуют в виде пеленгатора излучения ДПЛА типа АРК-РПЗ в сочетании с карманным компьютером «Кулон» и в комплекте с приемником GPS, в сочетании с носимым измерительным комплексом радиомониторинга и пеленгования АРК-НК3И (http://st.ess.ru/publications/4 2006/rembo/index.htm), осуществляет преобразование координат ДПЛА под огневую систему поражения.
Система огневого поражения 7 типа РСЗО ГРАД, гаубица Мста-С и др.
Активная система регистрации координат яркостных точек 8 состоит из взаимосвязанных системы подсвета типа серийно выпускаемого полупроводникового лазера, например, типа ЛПИ -114, по длине волны совместимого с длиной волны подсвета зарубежных ПТРК, высокочувствительного стробируемого прибора ночного видения ПНВ типа ЭП 62, усилителя света на входе, например, типа УПЗС-021; 023 и т.д., а также с вводимым на выходе люминесцентного экрана ЭОП и фотолинеек типа ФПУ64 с цилиндрической оптикой.
Бортовая система разового огневого поражения 9 - вертолетные малогабаритные НУРС
Бортовой процессор 10.
На фиг.2 - развернутая структурная схема теплового ИК обнаружения, блоки выполняются:
11 - система теплового ИК отображения, используется Сканер типа "ЭТНА-М"
http://www.niiki.ru/pages/p-e.html4, http://www.niiki.ru/pages/n-r-pr-peleng.html
Россия, 188540 Ленинградская обл. г.Сосновый Бор НИИКИ ОЭП
12 - фотозатвор, реализован в виде пространственно-временного модулятора света (ПВМС) на основе ЦТСЛ-керамики http://www.niiki.ru/pages/p-e.html, НИИКИ ОЭП, обеспечивающий операцию стробирования с формирующей на входе оптикой и отклоняющей пластиной и шаговым двигателем для установки угла обзора;
13 - задающий генератор, обеспечивающий необходимую скважность, выполнен по схеме мультивибратора, рис 5.11, стр.200. Брамер Н.А., Пащук И.Н. Импульсная техника. - М.: Высшая школа. 1985, 319 с.
14 - формирователь строб-импульса ПС длительностью выполнен по схеме ждущего мультивибратора, стр.201, рис.5.12. Брамер Н.А., Пащук И.Н. Импульсная техника. - М.: Высшая школа. 1985, 319 с., запускаемый по информации о дальности от радиолокационной станции отображения рельефа 4 (фиг.1);
15 - генератор накачки светодиодных матриц малой длительности с учетом выполнения требований энергетического подобия, выполнен по схеме рис.1. Легкий В.Н., Миценко И.Д., Каримбаев Д.Д. и др. Мощный генератор наносекундных импульсов с высокой частотой повторения //ПТЭ, №3, 1988, стр.96.
16 - прожектор подсвета в ночное время и при аэрозолях со сканером типа серийно выпускаемого полупроводникового лазера, например, типа ЛПИ -114, по длине волны совместимого с длиной волны подсвета зарубежных ПТРК или по технологии http://www.niiki.ru/pages/p-e.htm; Волков В.Г. Лазерные осветители и целеуказатели для приборов ночного видения //Журнал специальная техника, №2, 2002, http://st.ess.ru/publication2_2002/volkov/volkov.htm реализация сканера; прожектор изготавливается на базе фотиодных матриц различной длины волны в наборе с импульсной накачкой, стр.146-147, рис.2.89. Легкий В.Н., Миценко И.Д. и др. Малогабаритные генераторы накачки полупроводниковых лазеров. - Томск: Радио и связь, 1990, 215.
17 - полупрозрачная разделительная пластина - серийно выпускаемое изделие;
18 - QWIP матрица поиска по У, представляет из себя фотолинейку НПО «Восток» типа ФПУ64, имеющую четыре независимые матрицы по восемь элементов, т.е. 4*8*256. При независимом опросе каждой из четырех секторов матрицы при частоте тактовых импульсов ~ 10 МГц время опроса матрицы порядка 1 мс, на входе которой устанавливают цилиндрическую оптику;
19 - QWIP матрица поиска яркостной точки по Х - фотолинейка НПО «Восток» типа ФПУ64, имеющая четыре независимые последовательно соединенные фотолинейки, состоящие из восьми элементов, т.е. 4*8*256. При независимом опросе каждой из четырех секторов матрицы при частоте тактовых импульсов ~10 МГц время опроса матрицы составляет менее 1 мс, а на входе которой установлена цилиндрическая оптика;
20 - внутренний процессор поиска координат яркостных точек, обслуживает и регистрирует координаты яркостных точек;
21 - примером реализации ПНВ является ПНВ типа ЭП62Г разработки ЦКБ «Точприбор», г.Новосибирск или можно реализовать с помощью ТПИ, работающих в области спектра 0,6-2 мкм. В отличие от ЭОП ТПИ - безвакуумный прибор, не требует высоковольтного питания, легко стробируется, его устойчивость к воздействию световых помех на несколько порядков выше, чем у ЭОП. Достижения в технике передачи и воспроизведения изображений, Т.1 /Под ред. Б.Кейзана. - М.: Мир, 1978. 2. Алексадрович С.В., Антонов В.А., Григорьев В.А., Кошавцев Н.Ф. и др. Преобразование изображений ИК-диапазона (λmах>1,1 мкм) фоточувствительной жидкокристаллической структурой //Краткое сообщение по физике, 1992. N7, 8/;
22 - комплект усилителей яркости с формирующими объективами типа УПЗС-021 и 023;
23 - строб-импульс пикосекундной (ПС) длительности с вобуляцией;
24 - полупрозрачная разделительная пластина;
25 - QWIP матрица поиска по Х представляет из себя фотолинейку НПО «Восток» ФПУ64, имеющую четыре независимые матрицы по восемь элементов, т.е. 4*8*256. При независимом опросе каждой из четырех секторов матрицы при частоте тактовых импульсов ~10 МГц время опроса матрицы порядка 1 мс, на входе которой устанавливают цилиндрическую оптику;
26 - QWIP матрица поиска яркостной точки по У - фотолинейка НПО «Восток» типа ФПУ64, имеющая четыре независимые последовательно соединенные фотолинейки, состоящие из восьми элементов, т.е. 4*8*256. При независимом опросе каждой из четырех секторов матрицы при частоте тактовых импульсов ~ 10 МГц время опроса матрицы составляет менее 1 мс, на входе которой установлена цилиндрическая оптика;
27 - внутренний процессор поиска координат яркостных точек;
28 - прожектор подсвета в ночное время и при аэрозолях со сканером типа серийно выпускаемого полупроводникового лазера, например, типа ЛПИ -114, по длине волны совместимого с длиной волны подсвета зарубежных ПТРК или по технологии http://www.niiki.ru/pages/p-e.htm; Волков В.Г. Лазерные осветители и целеуказатели для приборов ночного видения //Журнал специальная техника, №2, 2002, http://st.ess.ru/publication2_2002/volkov/volkov.htm реализация сканера; прожектор - изготавливается на базе фотиодных матриц различной длины волны в наборе с импульсной накачкой, стр.146-147, рис.2.89. Легкий В.Н., Миценко И.Д. и др. Малогабаритные генераторы накачки полупроводниковых лазеров. - Томск: Радио и связь, 1990, 215;
29 - генератор накачки светодиодных матриц, стр.146-147, рис.2.89. Легкий В.Н., Миценко И.Д. и др. Малогабаритные генераторы накачки полупроводниковых лазеров. - Томск: Радио и связь, 1990, 215.
В статике внутри ДПЛА-1 в соответствии с фиг.1 и 2: система теплового ИК обнаружения 3 оптически связана с противотанковым ракетным комплексом ПТРК-2. Выход системы ИК обнаружения 3 соединен со входом 1 телеметрической системы связи 5. Второй вход телеметрической системы связи 5 соединен с выходом радиолокационной станции отображения рельефа и зеркальных точек 4, а ее вход через среду связи с противотанковым ракетным комплексом ПТРК-2. Дополнительный вход телеметрической системы связи 5 соединен с выходом активной системы регистрации координат яркостных точек 8. В свою очередь ее выход соединен с бортовой системой разового огневого поражения. Выход телеметрической системы связи соединен через атмосферный канал с наземный пунктом дистанционного управления огнем 6, выход которого соединен со входом системы огневого поражения 7.
Предлагаемый способ осуществляется следующим образом.
Защиту продвигающейся бронетанковой колоны по предлагаемому способу с учетом операций аналога в общем виде реализуют:
- периодически запускают дистанционно - пилотируемый летательный аппарат с бортовой радио-оптической аппаратурой распознавания, инвариантной к аэрозольным помехам и фоновым засветкам, с помощью которой регистрируют координаты наземных объектов в следующей последовательности:
- осуществляют по определенному закону облет трассы продвижении бронетанковой колоны (1 - пролет на стандартной высоте с построчным вертикальным обзором и 2 - пролеты на бреющем полете с засечкой координат яркостных точек ПТРК при горизонтальном обзоре простраства - новая вводимая операция);
- в обоих режимах пролетов фиксируют и распознают наземные объекты, выделяя средства поражения как наиболее опасные;
- обнаруживают на бреющем полете яркостные точки ПТРК, снайперских винтовок, артиллерийских установок, систем наведения и запуска управляемых снарядов и другие объекты военной техники противника, формирующие яркостные точки в момент подсвета, близкий к горизонтальному - вводимые операции;
- обеспечивают средства поражения разведывательными данными о видах и координатах военной техники, по сооружениям противника, а также о координатах яркостных точек, принадлежащих ПТРК, с последующим их поражением, обеспечивая операцию защиты в процессе продвижения бронетанковой техники.
В описанном способе вводятся новые операции: а) бреющий полет; б) обнаружение и регистрация координат яркостных точек противотанковых ракетных комплексов - ПТРК 2 и другого управляемого оружия, использующего лазерное наведение или подсвет, но расположенных на большом удалении от места продвигающейся бронетанковой колоны. Физика формирования яркостной точки сводится к процессу, когда оптический сигнал подсвета, например, с ДПЛА собирается приемным объективом на фокальную площадку. Переотражаясь от фокальной плоскости, энергия подсвета, попадаемая на объектив системы, возвращается в точку облучения и воспринимается как яркостная точка 9 - отражение близкое к зеркальному). При этом формируется максимальный уровень отраженного сигнала (коэффициент отражения ~0,9). Это отражение легко выделяется по уровню амплитуды сигнала от окружающего фона при активном или пассивном режимах работы пеленгатора.
При этом, как отмечено, разведка и поиск ПТРК 2 разбивается на две взаимосвязанные операции:
1 - известная операция, связанная с обнаружением на базе ДПЛА1 скопления и оценкой мест дислокации технических средств вооружения противника типа бронетехника, артиллерия, самолеты и др. в ИК посредством теплового ИК обнаружения 3 и СВЧ локатора (РЛС 4) при облетах на относительно большой высоте с близким или вертикальном угле обзора с формированием кадра за счет поперечного сканирования и перемещения объекта в продольном плоскости посредством использования методов распознавания и поиска объектов с относительно большим ЭПР. При этом яркостные точки как отражение от объективов для этого случая полета ДПЛА1 из-за вертикальных или близких к нему углов обзора отсутствуют. Для известных операций находится лишь предполагаемое место сосредоточения ПТРК:
- по вертикальной предполагаемой нечеткой малоразмерной проекции объекта, снятого в оптическом диапазоне длин волн 4,
- наличия цели определенной нестабильной ЭПР (металлоконструкция корпуса ПТРК) - признакам в СВЧ диапазоне;
2 - вводимые новые операции связаны с облетом предполагаемых мест дислокации ПТРК на бреющем полете, а также в сочетании с подсветом засечкой координат яркостных точек как внутреннее переотражение объективов ПТРК при горизонтальном подсвете. Процесс обнаружения яркостных точек по вводимой операции не должен зависеть от уровня фоновой засветки и от плотности аэрозольных помех. Т.е. не должен переводить оптический тракт в режим насыщения, не выдавать ложные тревоги и пропуски за счет обратного рассеяния от аэрозольных помех естественного и искусственного происхождения. Поэтому в предлагаемый способ вводят ряд существенных операций, а именно:
- выравнивание чувствительности фотоприемного тракта по дальности - ПРУ (программная регулировка усиления, обеспечивающая выравнивание чувствительности по дальности);
- операцию обеспечения инвариантности способа к дестабилизирующим факторам (аэрозольным помехам, фоновым засветкам и др.). Для этого вводят операцию стробирования, которая при коротких импульсах излучения и высоком разрешении по простраству (при выборе длительности операции стробирования) снижает уровень аэрозольной помехи как минимум на 30-60 дБ и более, А также вводят операцию вобуляции. Вобуляция - это операция изменения периода следования процесса стробирования, которая предназначена для устранения прицельных ответных активных помех со стороны перспективных создаваемых комплексов ПТРК.
При постоянной длительности строба для таких видов фотодетекторов как ФЭУ, ЭОП, фотоматрица и др. амплитуда сигнала определяется энергией принимаемого оптического сигнала. Поэтому можно считать, что процесс снижения фона связан с операцией изменения скважности импульсов стробирования, что подтверждается экспериментом. Для снижения энергии обратного рассеяния от аэрозоля до допустимого уровня необходимо переходить в диапазон субнаносекундных или пикосекундных импульсов излучения.
Длительность строба определяется разрешением по высоте протяженности обнаружителя и находится в пределах 10-30 нс. В процессе перестройки по дальности глубина загрубления, определяемая амплитудой строба, должна быть в соответствии с формулой светолокации -  , где а - коэффициент пропорциональности (при Н=0 величина Н загрубления, как правило, определяется потенциалом бортовой системы и составляет, например, для ближней локации - 130 дБ). Поэтому операцию стробирования и ПРУ необходимо реализовать по входным цепям - усилитель яркости или ЭОП. Однако при фоновой засветке для этой операции на выходе появляется аддитивная смесь строба и полезного сигнала. Для временной или частотной селекции полезного сигнала и устранения фоновой помехи их спектры огибающих и временные параметры - длительности должны существенно отличаться друг от друга. Поэтому для решения возникающей задачи и сокращения уровня обратного рассеяния от аэрозольных помех необходимо переходить в субнаносекундный или пикосекундный диапазон длительностей излучения. Однако при этом теряют энергию принимаемого сигнала. Поэтому при переходе в диапазон коротких импульсов излучения для сохранения энергии полезного сигнала должно выполняться условие энергетического подобия (с сокращением длительности излучения пропорционально увеличивается мощность). При отражении от аэрозольных помех амплитуда обратного рассеяния существенно снижается, а длительность коротких импульсов значительно расширяется и превышает отмеченные длительности стробов.
, где а - коэффициент пропорциональности (при Н=0 величина Н загрубления, как правило, определяется потенциалом бортовой системы и составляет, например, для ближней локации - 130 дБ). Поэтому операцию стробирования и ПРУ необходимо реализовать по входным цепям - усилитель яркости или ЭОП. Однако при фоновой засветке для этой операции на выходе появляется аддитивная смесь строба и полезного сигнала. Для временной или частотной селекции полезного сигнала и устранения фоновой помехи их спектры огибающих и временные параметры - длительности должны существенно отличаться друг от друга. Поэтому для решения возникающей задачи и сокращения уровня обратного рассеяния от аэрозольных помех необходимо переходить в субнаносекундный или пикосекундный диапазон длительностей излучения. Однако при этом теряют энергию принимаемого сигнала. Поэтому при переходе в диапазон коротких импульсов излучения для сохранения энергии полезного сигнала должно выполняться условие энергетического подобия (с сокращением длительности излучения пропорционально увеличивается мощность). При отражении от аэрозольных помех амплитуда обратного рассеяния существенно снижается, а длительность коротких импульсов значительно расширяется и превышает отмеченные длительности стробов.
Однако при таком подходе (в условиях соблюдения энергетического подобия) увеличивается не только амплитуда полезного сигнала, но и амплитуда аэрозольной помехи. Поэтому для обеспечения помехозащищенности системы к аэрозольным помехам необходимы новые операции. Если предположить, что ПТРК-техника находится в однородной по высоте аэрозольной помехе, например туман, то, вводя несколько рядом стоящих стробов с разрешением, превышающим размеры техники, сигнал помехи одновременно может присутствовать в обоих рядом стоящих стробах, а сигнал от цели - в одном, например в дальнем. Вводя операцию взаимного вычитания сигнала аэрозольной помехи в априоре заданным весовым коэффициентом, компенсируем помеху на селектируемых участках дальности и выделяем полезный сигнал, отраженный от объекта (ПТРК).
Если обратное рассеяние от аэрозольных помех за счет выбора длительности строба (увеличения мертвой зоны) и длительности импульса излучения (сокращение объема рассеяния) и введения операции вычитания, в заявляемом способе нейтрализуют принимаемый сигнал обратного рассеяния. Но при этом потери полезного сигнала, связанные с затуханием в атмосфере на трассе, по закону Бугера остаются, что приводит к увеличению вероятности пропуска процесса регистрации цели и снижению достоверности обнаружения. Необходимы новые дополнительные операции селекции объектов, чтобы обеспечить инвариантность операции обнаружения к аэрозольным помехам. Для этого при малой длительности строба дополнительно в блоке 8 (фиг.1) вводится адаптивная операция управления (повышения) потенциала, устраняющая ослабление на трассе. В предлагаемом частном случае эта операция реализуется посредством изменения усиления яркости принимаемого сигнала или операции его накопления по выходу, например, с помощью вводимого ПЗС фотоприемного тракта 24, 25 на выходе ПНВ 22 - фиг.3 или поднятия мощности излучения в зависимости от уровня затухания. Мерой уровня управления может служить операция просмотра дальности лоцирования посредством перемещающего строба. При этом проявляются следующие признаки:
- Если на дальности лоцирования нет помехи, то сигнал цели последовательно перемещается по заданной дистанции со скоростью выставляемых и перемещаемых стробов, имитирующих процесс сближения с целью;
- Если присутствует однородная помеха (наиболее вероятная ситуация для систем ближнего действия), а потенциал системы не достаточен для проникновения через толщу аэрозольной помехи, то при продвижении строба по дальности сигнал помехи появится в начале в ближней зоне и будет отсутствовать в дальней.
Зная дальность до цели (по положению строба или радиоканалу) и место положения амплитуды помехи, определяют по закону Бугера затухание на трассе, которое компенсируют операцией повышения потенциала системы как, например, управлением коэффициента усиления приемного тракта до появления сигнала помехи в дальней зоне. Но, учитывая наличие операции вычитания: помеха в продвигающихся по дальности стробах компенсируется, а сигнал цели выделяется последовательно, появляясь на селектируемых участках за счет повышение отношения сигнал - помеха. Таким образом логически доказали, что вводимые новые операции в заявляемом способе обеспечивают инвариантность предлагаемой системы к аэрозольным помехам. Аналогично доказывается возможность устранения импульса фоновой засветки (подставка от фона), образующийся в процессе стробирования. Следует отметить, что фоновая засветка, образующаяся от фона, дробовой шум и полезный сигнал образуют аддитивную смесь. Длительность импульса строба в силу вводимых ограничений, как правило, больше длительности сигнала, а образующий от фона дробовой шум на два-три порядка меньше импульса фона. Из-за вводимой операции стробирования импульс фона соизмерим с регистрируемым полезным сигналом. Для фотоприемных устройств, реагирующих на энергию принимаемого сигнала типа ЭОП, этого условия достаточно, чтобы селектировать объекты типа яркостных точек с помощью ЭОП как в ночное, так и в дневное время суток. Для дальнейшего улучшения, т.е. повышения достоверности операции селекции сигнала цели, можно использовать операцию выделения сигнала из аддитивной смеси, применяя операцию вычитания. Но для сигнала подсвета, в частном случае, необходимы через периодное излучение по отношению к периоду стробирования и реализации операции вычитания в двух рядом отстоящих выборках (добиваясь далее после операции вычитания процедуры оптимального выделения и обнаружения сигнала на фоне дробовых шумов).
Однако если учесть, что длительность строба с ПРУ во много раз превышает длительность импульса подсвета и, соответственно, во столько же раз отличаются их спектры, целесообразно ввести в приемный тракт спектральную селекцию. При этом потери, как будет показано далее, незначительны и приемлемы для практической реализации.
Для повышения достоверности обнаружения, устранения возможной засечки подсвета и постановки ответных прицельных активных помех в излучение подсвета предлагается ввести операцию вобуляции периода излучения и стробирования. Искусственный лазерный подсвет выполняется в виде единого блока, устанавливаемого на борту ДПЛА.
С учетом раскрытых особенностей порядок последовательности выполняемых операций в предлагаемом способе защиты бронетанковой техники определяется:
- выпускают ДПЛА1 для разведки местности с определенной в априори заданной высотой и траекторией полета;
- включают измерительные бортовые системы, измеряющие высоту, вектор полета, скорость и направление ветра, канал помехи и др., и систему отображения и распознавания рельефа;
- осуществляют с высоты полета обзор и анализ рельефа местности в диапазонах (оптический: ближний, дальний, ультрафиолетовый и радио СВЧ);
- при вертикальном зондировании подстилающей поверхности с заданной в априори высоты регистрируют и передают информацию об объектах на подстилающей поверхности и распознают объекты (бронетехнику, артиллерию, укрепсооружения, отражение металлоконструкций и др.);
- фиксируют координаты выявленных целей;
- передают кодированную информацию на командный наземный пункт управления 6 фиг.1, где принимают информацию, засекают координаты и дополнительно обрабатывают полученную информацию скоростным, емким вычислительным наземным комплексом;
- в зависимости от важности полученной информации выдают команду на поражение;
- для нейтрализации ПТРК переводят процесс поиска в бреющий режим (особенно, если ПТРК замаскирован, а информации маловероятна для известных средств распознавания);
- в оптическом диапазоне с помощью блока 3, 8 осуществляют поиск яркостных точек в режиме, близком к горизонтальному подсвету (например, высота регистрации, 10-20 м - катет, а дальность обнаружения 100 м - 3-4 км - гипотенуза); и реализуют в процессе обнаружения яркостных точек операции:
- подсвет - короткими импульсами как операцию, снижающую уровень обратного рассеяния от аэрозольных помех;
- повышение потенциала за счет увеличения мощности излучения и введения операции усиления яркости при приеме (соблюдение принципов энергетического подобия),
- выравнивание чувствительности по дальности (ПРУ - программная регулировка усиления) - операция, устраняющая ложные срабатывания в ближней зоне, например, при наличии обратного рассеяния от аэрозольных помех;
- стробирование приемного тракта и просмотр селектируемой дальности посредством смещения места стробирования по дальности с определенной скоростью - снижающая вероятность появления ложных срабатываний как отношение периода следования стробирующих импульсов к длительности строба;
- вобуляция периода импульсов подсвета и стробов и частотно зависимое накопление как операции, устраняющие ложные срабатывания при ответных активных помехах со стороны ПТРК;
- помехозащита от фона, достигаемая посредством спетральной селекции огибающих подставки от фона и принимаемого отраженного сигнала;
- снижение уровня обратного рассеяния от аэрозольных помех достигается ведением, например, дуального стробирования, операции взвешенного вычитания сигналов аэрозольной помехи как одновременно появляющихся в рядом стоящих, но перемещающихся стробах при выполнении операции ПРУ и применении коротких импульсов при подсвете;
- управление потенциала по уровню затухания на трассе как операция обеспечения инвариантности регистрации координат яркостных точек к аэрозольным помехам;
- передают информацию на командный наземный пункт управления 6, например, в момент пролета над поражаемым объектом 2 с целью засечки обнаруженной яркостной точки.
По пунктам описаны известные операции прототипа и новые, заявляемые с момента операции перехода на бреющий полет, повышающие эффективность защиты бронетанковой техники.
В отличие от известных решаемых задач предлагается внедрить новые операции: - подавления наземных ПТРК путем обнаружения и нейтрализации «яркостных точек», находящихся на дальностях от колоны в радиусе более 4 км (дистанция, превышающая радиус обнаружения известных оптикоэлектронных методов обнаружения и превышающая радиус огневых средств поражения бронетанковой техники).
В заключении отметим, что повышение помехозащиты оптических систем обнаружения летательного аппарата и обеспечения инвариантности к аэрозольным помехам достигается по трем предлагаемым вводимым направлениям:
а) переход в диапазон коротких импульсов излучения пикосекундного диапазона;
б) введение операции стробирования по входу, вобуляции,
в) обеспечение инвариантности предлагаемого способа к аэрозольным помехам, которое достигается компенсацией затухания излучаемого сигнала на трассе путем введения операции изменения потенциала системы (повышение мощности излучения или улучшения чувствительности) до появления признаков помехи на селектируемой дистанции и последующего введения операции ликвидации признаков помехи на селектируемом участке путем его разбиения на ряд смежных участков (например два) и введения предлагаемой операции вычитания (так как аэрозольная помеха и сигнал представляют аддитивную смесь, сигнал как отражение от плоской преграды локализован на одном из участков, а аэрозольная помеха как отражение от селектируемого объема представляет растянутый импульс с относительно равномерной амплитудой для коротких импульсов подсвета и при относительно малом объеме рассеяния).
Все три пункта плюс выявление ПТРК по яркостным точкам и переход на бреющий полет (очевидные операции, не требующие особых доказательств) ведут к основному преимуществу предлагаемого способа, а именно повышению уровня защиты бронетанковой техники, достоверности обнаружения, повышению вероятности нейтрализации противотанковых комплексов противника с малым ЭПР, расположенных на большом удалении от наступательного вооружения, за пределами возможностей бронетехники.
Приведем некоторые теоретические доказательства реальной возможности выполнения поставленной задачи.
В отличие от перечисленных работ исследования характеристик обратного рассеяния применительно к лазерным системам ближнего действия проводилось с использованием синтезированных импульсной и передаточной характеристик аэрозольной среды. Такой подход позволяет найти параметры сигнала от аэрозольной помехи для любого вида модуляции и рассчитать помехозащищенность оптико-электронных систем с различными способами обработки сигнала.
Для количественной оценки обратного рассеяния будем использовать известные оптические характеристики облачности: коэффициент рассеяния σs, индикатриса рассеяния fn(θ) и градиент изменения σs-ξn.
Решения по определению импульсной характеристики аэрозольной среды базируются на статистике выживания фотонов на трассе распространения излучения и обратного рассеяния. Обозначим через Г событие, заключающееся в том, что излученные фотоны были впервые рассеяны в слое от Н до Н+ΔН, и после рассеяния их траектория лежит внутри телесного угла Ωn.
Чтобы произошло событие Г, должны выполняться следующие условия:
Г1 - фотон рассеется, пройдя расстояние от 0 до Н;
Г2 - он будет рассеян в интервале от Н до Н+ΔН;
Г3 - траектория переотраженного фотона лежит внутри телесного угла;
Г4 - переотраженный фотон достигает приемника.
Вероятности этих событий соответственно равны
 ;
;  ,
,
где Ωпр - угол поля зрения приемного объектива;
 ;
;  ;
;
Р1 - вероятность попадания фотона на общую площадь приемоизлучателя;
Р2 - вероятность того, что фотон рассеется в слое ΔН;
 ;
;
S(H) - площадь, перекрытия диаграммы приемоизлучающих объективов.
Считая события Г1, Г2, Г3, Г4 независимыми, имеем
 .
.
За время длительности светового импульса τи излучается  фотонов (где Р0 - мощность излучателя), в этом случае событие
фотонов (где Р0 - мощность излучателя), в этом случае событие
определяет приращение мощности ΔР на интервале ΔН, расположенном на дистанции Н при облучении среды единичным импульсом, то есть служит мерой реакции среды и является импульсной характеристикой
Для принятой размерности hδ(t), используя интеграл Дюамеля, отражающий характер изменения огибающей светового сигнала аэрозольной помехи на входе объектива, имеет вид
 ,
,
где Ри(Н) - функция, определяющая огибающую излучения фотонов.
Для экспоненциальной формы импульса
 ,
,
где  ,
,
Вводя подстановку  ;
;  получим
получим
 .
.
В этом случае, учитывая ранее представленные соотношения, имеем
 ,
,
где  - площадь перекрытия диаграмм приемопередатчика;
- площадь перекрытия диаграмм приемопередатчика;
Н* - расстояние до кромки облачности.
Очевидно, значение огибающей Рn(Н) на входе фотоприемника может быть получено для любой формы излученного сигнала при подстановке соответствующих значений функций Pи(t).
Значение функции Рn(Н) характеризует долю вклада отраженного сигнала по дальности, которая при временном представлении описывается соответствующей огибающей Pn(t).
При сопряженных диаграммах, когда  , а Н*=0, исходная зависимость приводится к виду, удобному для расчета на ЭВМ.
, а Н*=0, исходная зависимость приводится к виду, удобному для расчета на ЭВМ.

или
 ,
,
где zp=fn(θ)P0S2 вх, H0 - «мертвая зона» (ближняя зона, где Pn(H)=0).
Используя теорему о среднем, легко получить
С учетом того, что 
получим
 ,
,
где пшг - число "шагов" на дистанции Н, определяемых интервалом ΔН.
Учитывая, что разрешение по дальности
 , а
, а  ; то из приведенного соотношения вытекает, что максимальный уровень обратного рассеяния-помеха приходится на дистанцию Но и его можно в упрощенном виде описать соотношением Рn=аP0τu, где а - коэффициент пропорциональности; Р0 - излучаемая мощность. Т.е чем короче импульс излучения τи, тем меньше объем рассеяния и тем меньше обратное рассеяние и соответственно уровень помехового сигнала.
; то из приведенного соотношения вытекает, что максимальный уровень обратного рассеяния-помеха приходится на дистанцию Но и его можно в упрощенном виде описать соотношением Рn=аP0τu, где а - коэффициент пропорциональности; Р0 - излучаемая мощность. Т.е чем короче импульс излучения τи, тем меньше объем рассеяния и тем меньше обратное рассеяние и соответственно уровень помехового сигнала.
Необходимо отметить, что
- на амплитудное распределение сигнала оказывает существенное влияние Но, где Но - величина "мертвой зоны". Гиперболический характер изменения Рn(Н) в зависимости от Но свидетельствует о том, что основная мощность отраженного светового сигнала формируется в области, прилегающей непосредственно к системе. Практически 90% энергии обратного рассеяния сосредоточено в объеме с пространственным расстоянием Нэф=0-4 м;
- для приемопередающих устройств с малыми базовыми расстояниями (Но<0,5 м) величина "мертвой зоны", амплитуда отраженных импульсов увеличивается практически линейно в зависимости от коэффициента рассеяния σs м-1;
- с увеличением Но линейность зависимости Pn(H)=f(σs) нарушается, стремясь к приведенной функциональной зависимости с экстремумом в точке аргумента σs=0,1÷0,4 м-1.
Очевидно, что расширение импульса наблюдается, когда разрешающая способность импульса по дальности будет меньше Нэф, то есть  . Численный анализ зависимости, проведенный для наиболее вероятных значений σs≈0,01 1/м и П≈5·106, доказывает, что эффективная длина облака формирования 90% обратного рассеяния соответствует Нэф=4÷5 м.
. Численный анализ зависимости, проведенный для наиболее вероятных значений σs≈0,01 1/м и П≈5·106, доказывает, что эффективная длина облака формирования 90% обратного рассеяния соответствует Нэф=4÷5 м.
Поэтому существенное расширение импульса будет наблюдаться лишь при малых длительностях зондирующего импульса  , то есть при τu<20 нс. Степень расширения импульса обратного рассеяния в зависимости от конструктивных параметров систем и плотности аэрозоля можно оценить по соотношению
, то есть при τu<20 нс. Степень расширения импульса обратного рассеяния в зависимости от конструктивных параметров систем и плотности аэрозоля можно оценить по соотношению  .
.
С учетом сказанного заявителем вводится метод помехозащиты, основанный на создании знакопеременной функции селекции по дальности, разрешающая способность которой по полупериоду должна быть не менее Нэф.
Расчеты, определяющие мощность помеховых импульсов на входе фотоприемного тракта при различных длительностях огибающей, представлены на фиг.4.
Имперически для малых длительностей это можно представить Рn=Р0aτu, где а - коэффициент пропорциональности. Выигрыш в помехозащите можно оценить по соотношению энергии сигнала Еc к энергии аэрозольной помехи - Еn=Рnτu. В условиях энергетического преобразования с соблюдением энергетического подобия энергия излучения должна быть постоянна Ec.=const, тогда

Т.е. отношение сигнал-помеха резко улучшается с переходом в субнаносекундный и пикосекундный диапазон длительностей лазерного излучения.
Рассчитанное и подтвержденное экспериментом распределение помехового сигнала показывает, что с уменьшением длительности от 50 нс до 2 нс и менее амплитуда импульса обратного рассеяния уменьшается до 20 раз и более, в зависимости от плотности аэрозоля, расстояния до кромки облачности и величины "мертвой зоны". При снижении плотности аэрозольных образований становятся заметнее искажения отраженных от них оптических сигналов, что приводит к расширению длительности огибающей и тем больше, чем больше отношение  к
к  .
.
Далее математически подтвердим, что введение операции стробирования и программной регулировки ПРУ на первых каскадах с целью получения для помехозащиты большой глубины загрубления тракта практически не влияет на энергетику принимаемого сигнала. Сигнал на выходе фотоприемного тракта в общем виде представляет собой:

Uc(t) - огибающая полезного сигнала; Uфо - огибающая постоянной составляющей фоновой солнечной засветки; Uш.др - дробовой шум, обусловленный фоновой засветкой; Uшу - тепловой шум усилителя; U0 - постоянная составляющая фоновой засветки.
Наличие фоновой солнечной засветки с уровнем мощности Рф приводит к появлению постоянной составляющей Uфо и дробового шума Uш.дp, изменяющихся под действием отражающих свойств поверхности, на которой располагается объект. Первая составляющая сигнала Uф0 приводит при определенных условиях к насыщению фотоприемника, «запиранию», а вторая Uш.др - к появлению ложных тревог. Кроме того, для определенных видов систем огибающая сигнала от фона, зависящая от альбедо поверхности, также может привести к появлению ложных тревог. Значение Uфо можно оценить, используя известное соотношение
Uф0(t)=(ηe/hν)PфRн, или Uф0=РфS[B/Вт],
где η - квантовая эффективность катода, е - заряд электрона, h - постоянная Планка, ν - частота излучения, RH - сопротивление нагрузки, или найти его через вольт-ваттную характеристику (Sф) фотоприемника Uф0(t)=SфРф. (t) Соответственно, уровень дробового шума определяется выражением
Uш.др=[2eΔf(ηe/hν)РфRн 2]1/2,
где Δf - полоса пропускания инерционного звена фотоприемника, Рф - мощность солнечной фоновой засветки, сопротивление нагрузки.
Если учесть, что для реальных систем дальнометрии (СД) уровень Рф.mах на светочувствительной площадке приемника существенно превышает уровень пороговой мощности сигнала, a Uш.max в некоторых случаях намного больше пороговой чувствительности фотоприемника и всего тракта в целом, то проблема ослабления фоновой засветки весьма актуальна и практически до сих пор не решена полностью.
Применение в данной ситуации полосовых абсорбционных оптических фильтров из-за малой крутизны их фильтрационной характеристики не дает ощутимых преимуществ в фотоприемниках с узкой спектральной характеристикой чувствительности. Проанализируем некоторые способы снижения влияния засветки от фона. Так как спектр сигнальных импульсов пикосекундного диапазона во много раз шире спектра огибающей фона 20-40 нс, помеховый сигнал Uфо может быть, как ранее отмечено, подавлен фильтром, полоса непрозрачности которого определяется спектром огибающей стробируемой засветки. Однако возможна потеря энергии сигнала, поэтому целесообразно определить область применимости данного метода.
При наличии фильтра нормированная энергия импульса
ηнорм=(ЕэΔωв-ЕэΔωф)/ЕэΔωв
где ЕэΔωв - энергия импульса, соответствующая 0,9 ЕэΔω;
ЕэΔωф - энергия импульса, сосредоточенная в полосе фильтра.
Рассмотрим возможности подавления помехового сигнала для двух видов импульсов: прямоугольного и колоколообразного.
При прямоугольном импульсе энергию сигнала, заключенную в полосе частот Δω, можно найти, используя известные соотношения:
 ,
,
где S(jω) - спектральная плотность сигнала; Um, τи - амплитуда и длительность импульса;
 - интегральный синус.
- интегральный синус.
Учитывая, что
ЕэΔωв→∞=Um 2τu; Δωвτu/2=π; Δf=1/τu,
энергия импульса будет равна
ЕэΔωв=2Um 2τuSi(2π)/π=0,9ЕэΔω→∞
Нормированная энергия импульса в этом случае может быть представлена в следующем виде:
ηнорм=1-2[Si(2π/mф)-sin(π/mф)/(π/mф)]/0,9π,
где  ,
, 
Аналогично для колоколообразного импульса выражение имеет вид
 .
.
Данные расчета ηнорм по полученным зависимостям приведены на фиг.5.
Из фиг.5 видно, что независимо от формы импульса при mф>10 фильтр низкой частоты с точностью не ниже 20% не оказывает влияния на энергию принимаемого сигнала.
Таким образом, для сокращения числа ложных тревог необходимо, чтобы длительность импульса выбиралась с учетом выполнения полученного соотношения для mф.
Для снижения возможных потерь энергии полезного сигнала необходимо сокращать длительность огибающей светового импульса.
В заявляемом варианте mф>100, поэтому, выполняя требования энергетического подобия и рекомендуемого значения mф, за счет введения операций стробирования первых каскадов обеспечивают большую глубину процесса стробирования, что в сочетании с вводимой операцией вобуляции обеспечивает высокую помехозащищенность оптического канала, и соответственно можно выполнить требования по высокой достоверности обнаружения ПТРК.
Таким образом, поставленная задача предлагаемого изобретения, направленная на повышение уровня защиты бронетанковой техники, достоверности обнаружения, вероятности нейтрализации противотанковых комплексов противника с малым ЭПР, расположенных на большом удалении от наступательного вооружения, повышение помехозащиты оптических систем обнаружения летательного аппарата и обеспечение инвариантности к аэрозольным помехам, доказана.
В заключении отметим, что в заявляемом способе предлагаются оригинальные методы нейтрализации оптических систем наведения, практическая реализация которых является своевременным и актуальным этапом модернизации бронетанковой техники.
Использование предлагаемого способа защиты бронетанковой техники от современных противотанковых ракетных комплексов и создание на этой основе техники нового поколения позволит резко повысить могущество бронетанковой техники, снизить вероятность поражения бронетанковой техники системами ПТРК и увеличить эффективность проведения боевых операций, устранив отставание бронетанковой техники в своем развитии от средств ее поражения, тем самым обеспечив подъем продаж бронетанковой техники за рубежом.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЗАЩИТЫ БРОНИРОВАННОЙ ТЕХНИКИ НА МАРШЕ ОТ ВОЗДЕЙСТВИЯ КАССЕТНЫХ БОЕВЫХ ЭЛЕМЕНТОВ С МНОГОКАНАЛЬНЫМИ ДАТЧИКАМИ ЦЕЛЕЙ | 2016 |
|
RU2651788C2 |
| АДАПТИВНЫЙ СПОСОБ ЗАЩИТЫ ОБЪЕКТА ОТ УПРАВЛЯЕМОЙ ПО ЛАЗЕРНОМУ ЛУЧУ РАКЕТЫ | 2014 |
|
RU2553407C1 |
| СИСТЕМА ЗАЩИТЫ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ ОТ САМОНАВОДЯЩИХСЯ И САМОПРИЦЕЛИВАЮЩИХСЯ ВЫСОКОТОЧНЫХ БОЕПРИПАСОВ НА МАРШЕ | 2021 |
|
RU2751260C1 |
| Способ формирования изображения карты дальностей до наблюдаемых объектов в рассеивающих средах | 2024 |
|
RU2837050C1 |
| СПОСОБ НОЧНОГО И/ИЛИ ДНЕВНОГО НАБЛЮДЕНИЯ УДАЛЕННОГО ОБЪЕКТА С СИНХРОННОЙ ФАЗОВОЙ МАНИПУЛЯЦИЕЙ ЛАЗЕРНЫМИ ИМПУЛЬСАМИ ПОДСВЕТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2269804C1 |
| ЛАЗЕРНЫЙ ИМПУЛЬСНЫЙ ДАЛЬНОМЕР | 2004 |
|
RU2288449C2 |
| УСТРОЙСТВО ЗАЩИТЫ ОТ САМОНАВОДЯЩИХСЯ СУББОЕПРИПАСОВ | 2019 |
|
RU2704549C1 |
| СПОСОБ СОЗДАНИЯ АКТИВНЫХ ПОМЕХ ЛАЗЕРНЫМ СРЕДСТВАМ ДАЛЬНОМЕТРИРОВАНИЯ | 2000 |
|
RU2186409C2 |
| ВЗРЫВАТЕЛЬ | 2007 |
|
RU2362969C2 |
| СПОСОБ ОДНОВРЕМЕННОГО НАВЕДЕНИЯ ТЕЛЕОРИЕНТИРУЕМЫХ В ЛУЧЕ УПРАВЛЕНИЯ РАКЕТ (ВАРИАНТЫ) И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2479818C1 |
Изобретение относится к методам регистрации яркостных точек и может быть использовано для защиты бронетанковой техники. Технический результат - повышение уровня защиты. Способ включает запуск с защищаемого объекта дистанционно пилотируемого летательного аппарата (ДПЛА), с которого по тепловому инфракрасному излучению и в активном режиме радиолокации обнаруживают и распознают объект противника. Передают информацию на космическую систему или в наземный пункт дистанционного управления, по излучению с летательного аппарата в автоматическом режиме определяют координаты объекта противника и передают их на командный пункт. Производят в автоматическом режиме расчет установок и последующее огневое поражение объекта противника. При этом переводят (ДПЛА) в режим бреющего полета, осуществляют горизонтальный подсвет в режиме пикосекундного диапазона излучения с вобуляцией его периода излучения и синхронным стробированием приемного тракта. Осуществляют выравнивание чувствительности по дальности лоцирования, адаптацию к фону и компенсацию помехи на селектируемом участке. Компенсируют затухание на трассе распространения импульсов для обеспечения инвариантности к аэрозольным помехам, регистрируют координаты яркостных точек по местоположению летательного аппарата в момент его непосредственного бреющего прохода над объектом противника. 5 ил.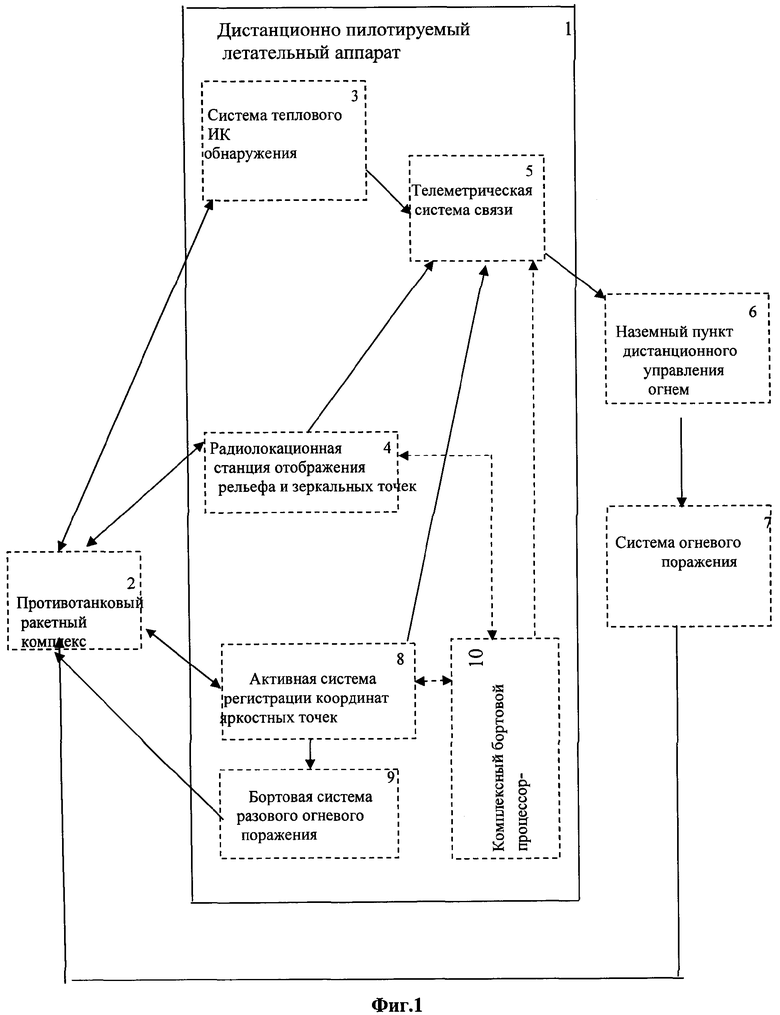
Способ защиты бронетанковой техники, включающий запуск с защищаемого объекта дистанционно пилотируемого летательного аппарата, с которого по тепловому инфракрасному излучению и в активном режиме радиолокации обнаруживают и распознают объект противника, передают информацию на космическую систему или в наземный пункт дистанционного управления, по излучению с летательного аппарата в автоматическом режиме определяют координаты объекта противника и передают их на командный пункт, производящий в автоматическом режиме расчет установок и последующее огневое поражение объекта противника, отличающийся тем, что переводят дистанционно пилотируемый летательный аппарат в режим бреющего полета, осуществляют горизонтальный подсвет в режиме пикосекундного диапазона излучения с вобуляцией его периода излучения и синхронным стробированием приемного тракта, осуществляют выравнивание чувствительности по дальности лоцирования, адаптацию к фону и компенсацию помехи на селектируемом участке, компенсируют затухание на трассе распространения импульсов для обеспечения инвариантности к аэрозольным помехам, регистрируют координаты яркостных точек по местоположению летательного аппарата в момент его непосредственного бреющего прохода над объектом противника.
| СИСТЕМА САМООБОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2204108C1 |
| СПОСОБ ЗАЩИТЫ ОБЪЕКТОВ ОТ СРЕДСТВ ПОРАЖЕНИЯ | 2004 |
|
RU2287763C2 |
| СИСТЕМА САМООБОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА "РАНОВИТ" | 2004 |
|
RU2257531C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МНОГОЛЕЗВИЙНЫХ РЕЖУЩИХ ИНСТРУМЕНТОВ | 2006 |
|
RU2306208C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ШЛАКОВОГО РАСПЛАВАВ КОВШЕ | 0 |
|
SU292912A1 |

