Изобретение относится к области артиллерийских систем, установленных на транспортном средстве. Артиллерийские системы этого типа предусматривают самозащиту транспортных средств, преимущественно танков.
Прототипом изобретения является система самообороны транспортного средства, зарегистрированная в Государственном реестре изобретений 2102678 от 20.01.1998 г. [1].
Согласно этому прототипу система самообороны содержит радиолокационную станцию (РЛС) обнаружения и измерения траекторных параметров атакующего средства, блок прогнозирования входа атакующего средства в зону поражения системы, блок выбора защитного боеприпаса и выдачи команд на его отстрел и подрыв, комплект защитных боеприпасов, формирующих круговую оборону. Каждый боеприпас размещен в пусковой шахте, а сами пусковые шахты расположены вокруг башни танка. Пусковая шахта имеет прямоугольное сечение и установлена наклонно, предпочтительно под углом 25-40o, к вертикальной оси танка.
Как следует из описания работы рассматриваемой системы самообороны, РЛС производит измерение дальности, угла места, азимута и доплеровской составляющей вектора скорости.
Поэтому при работе системы для обеспечения необходимых углов подлета атакующего средства необходимо, чтобы диаграмма направленности приемопередающих антенн практически на всем рабочем участке была направлена в сторону подстилающей поверхности. Такой режим работы, как показано в [2], [3], [4], приводит к тому, что на входе приемного устройства, кроме прямого сигнала, отраженного от атакующего средства, формируются сигналы от атакующего средства, переотраженные от земной поверхности, т.е. как бы появляется "антипод" атакующего средства. Это приводит к тому, что в зависимости от величины коэффициента переотражения радиолокационных сигналов от земной поверхности РЛС определяет не фактические координаты атакующего средства, а координаты фиктивного центра отражения, расположенного между атакующим снарядом и "антиподом". Поэтому в связи с появлением "антипода" атакующего средства снижаются точностные характеристики измерения параметров траектории полета, что приводит к нестабильной работе системы защиты в целом и пропуску атакующего средства.
Задача, решаемая изобретением, - снижение влияния переотражений подстилающей поверхности на точность измерения траекторных параметров РЛС станции и тем самым повышение вероятности поражения атакующего средства системой самообороны. Техническим решением задачи является ведение в приемные каналы РЛС системы блока разделения доплеровских частот от атакующего средства и "антипода" и выбора сигнала с более высокой доплеровской частотой. При этом система самообороны транспортного средства, например танка, содержит: РЛС обнаружения и измерения траекторных параметров атакующего средства, приемные каналы которой снабжены блоком разделения доплеровских частот и выбора сигнала с более высокой доплеровской частотой, и боеприпасы, расположенные на верхних частях этого транспортного средства и формирующие круговую оборону; каждый боеприпас размещен в пусковом устройстве и имеет метательный заряд и антиснаряд.
Сущность предлагаемой системы состоит в том, что доплеровские частоты сигналов, отраженных от атакующего средства и переотраженных от земной поверхности, всегда отличаются друг от друга, причем, чем ближе подлетает атакующий снаряд к защищаемому объекту, тем больше они отличаются друг от друга. Это отличие может составлять единицы килогерц для системы самообороны, имеющей небольшое время реакции защитного боеприпаса, какое обеспечивается в указанном выше прототипе. Такое отличие доплеровских частот сигналов, отраженных от атакующего средства и переотраженных от земной поверхности, позволяет использовать частотное разделение этих сигналов в приемных каналах с помощью полосовых фильтров. Причем, так как частота Доплера от атакующего средства всегда больше, чем аналогичная частота "антипода", то в приемных каналах должны выделяться сигналы атакующего средства с более высокой доплеровской частотой, что и позволяет снизить влияние подстилающей поверхности на точностные характеристики РЛС и тем самым повысить вероятность поражения атакующих средств.
Изобретение поясняется чертежом.
На чертеже изображена функциональная схема РЛС с исключением отраженных от земной поверхности сигналов.
На чертеже обозначено:
1 - модулятор сигнала передатчика;
2 - усилитель мощности;
3 - задающий генератор;
4 - преобразователь частоты;
5 - модулятор;
6 - блок памяти;
7 - генератор модулирующего сигнала;
8 - усилитель мощности;
9 - задающий генератор;
10 - делитель мощности;
11 - генератор модулирующего сигнала с задержкой;
12 - преобразователь частоты опорного канала;
13, 18 - фильтры предварительной фильтрации;
14, 19 - усилители;
15, 20 - преобразователи частоты;
16, 21 - полосовые усилители;
17 - преобразователь частоты измерительного канала;
22 - задающий генератор;
23 - преобразователь частоты;
24 - делитель мощности;
25 - блок разделения доплеровских частот и выбора сигнала с более высокой доплеровской частотой;
26 - формирователь сигнала дальности;
27 - устройство определения обобщенных координат;
28 - измеритель разности фаз;
29 - схема сравнения;
30 - регистр хранения предыдущей координаты;
31 - вычислитель;
32 - измеритель частоты Доплера;
33 - устройство определения номера боеприпаса;
34 - счетчик времени выдачи команды на отстрел боеприпаса;
35, 38 - ключи;
36 - задающий генератор;
37 - счетчик времени выдачи команды на подрыв боеприпаса.
Сигнал несущей частоты с задающего генератора 3 через усилитель мощности 2 поступает на модулятор сигнала передатчика 1. Этот модулятор 1 модулирует сигнал несущей частоты сигналом, поступающим с генератора модулирующего сигнала 7. Выходной сигнал модулятора сигнала передатчика 1 через антенну А1 излучается в открытое пространство. В то же самое время сигнал, полученный с генератора модулирующего сигнала 7, поступает на модулятор сигнала передатчика 1 и на генератор модулирующего сигнала 11 с задержкой, величина этой задержки изменяется путем подачи сигнала номера расчетной зоны обнаружения атакующего средства с блока памяти 6 на вход вышеуказанного генератора. Модулирующий задержанный сигнал поступает на формирователь сигнала первого гетеродина. Формирователь сигнала первого гетеродина содержит преобразователь частоты 4, модулятор 5 и делитель мощности 10. Сигнал несущей частоты с задающего генератора 3 подается на первый вход преобразователя частоты 4, а на второй вход поступает сигнал первой промежуточной частоты с задающего генератора 9, выходной сигнал с преобразователя частоты поступает на первый вход модулятора 5, на второй вход которого поступает модулирующий задержанный сигнал. Сигнал первого гетеродина поступает с выхода модулятора 5 через делитель мощности 10 на первые преобразователи частоты 12, 17 опорного и измерительного каналов соответственно.
Как опорный, так и измерительный каналы РЛС имеют одинаковые составные части.
Работа опорного канала происходит следующим образом. Сигнал с приемной антенны А2 поступает на первый вход преобразователя частоты 12, а на его второй вход поступает сигнал с делителя 10 первого гетеродина. С выхода преобразователя частоты 12 сигнал частотой, равной разности значений промежуточной частоты и частоты Доплера атакующего средства и "антипода", поступает на фильтр 13 предварительной фильтрации сигналов, отраженных от атакующего средства.
С выхода фильтра 13 сигнал поступает на усилитель 14, а с выхода последнего - на первый вход преобразователя частоты 15, на второй вход которого подается сигнал со второго гетеродина. Одновременно с этим сигнал с выхода фильтра 13 поступает на первый вход преобразователя частоты 23, на второй вход которого приходит сигнал первой промежуточной частоты с задающего генератора 9, на третий вход преобразователя 23 подается сигнал задающего генератора 22. Сигнал доплеровской частоты с первого выхода преобразователя частоты 23, содержащий информацию о скорости атакующего средства и "антипода", поступает на блок разделения доплеровских частот и выбора сигнала с более высокой доплеровской частотой 25. Затем сигнал с более высокой доплеровской частотой подается на измеритель частоты Доплера 32, на четвертый вход преобразователя частоты 23 и на формирователь сигнала дальности 26, выходной сигнал которого поступает на устройство определения обобщенных координат 27. Со второго выхода преобразователя частоты 23 сигнал через делитель мощности 24 поступает на вторые входы преобразователей частоты 15, 20 опорного и измерительного приемных каналов. С выходов преобразователей частоты 15, 20 сигнал на частоте, равной значению второй промежуточной частоты, поступает через полосовые усилители 16, 21 с полосой пропускания, обеспечивающей подавление сигнала "антипода", на первый вход измерителя разности фаз 28 блока прогнозирования.
Работа измерительного приемного канала аналогична работе опорного канала за исключением того, что его выходной сигнал поступает на второй вход измерителя разности фаз 28. Разность фаз между опорным и измерительным приемными каналами содержит информацию об угловых траекторных параметрах атакующего средства.
Работа блоков 29-38 аналогична работе блоков прототипа [1].
Система самообороны работает следующим образом.
При попадании атакующего средства в зону действия РЛС сигнал с ее входа поступает в блок прогнозирования входа атакующего средства в зону поражения системы. Блок прогнозирования анализирует полученные сигналы и переводит РЛС в режим измерения. Информация о параметрах атакующего средства (дальность, скорость, азимут, угол места) снова подается в блок прогнозирования. Для уменьшения влияния подстилающей поверхности в приемные каналы вводятся блоки и устройства разделения сигналов атакующего снаряда и "антипода". В процессе измерения блок прогнозирования управляет работой радиолокационной станции и по данным, полученным в процессе измерения, рассчитывает точку попадания атакующего средства в зону поражения системы.
Эффективность и работоспособность заявленной системы подтверждена математическим моделированием системы самообороны в целом.
Источники информации
1. Патент 2102678 (РФ). Система самообороны транспортного средства. / КБ машиностроения; заявл. 01.09.95, 95122733.
2. А.Ф. Величко. Моделирование на ЭВМ амплитуд, фаз, периодов смеси сигнал + шум на выходе РЛС непрерывного излучения с ЧМ. Харьков: АН УССР, институт радиофизики и электроники. 1988 г., 29 с.
3. Распространение и дифракция радиоволн в миллиметровом и субмиллиметровом диапазонах. Сборник научных трудов. Киев: Наукова думка, 1984 г., 300 с.
4. Справочник по основам радиолокационной техники // под ред. В.В. Дружинина. М.: Военное издательство МО СССР. 1967 г., 768 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА САМООБОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2286529C2 |
| СИСТЕМА САМООБОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2336485C2 |
| СИСТЕМА САМООБОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2102678C1 |
| СИСТЕМА ДОРОЖНОЙ СИГНАЛИЗАЦИИ ТАНКА | 2001 |
|
RU2202758C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2002 |
|
RU2207488C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1999 |
|
RU2144681C1 |
| ПРИЦЕЛ-ПРИБОР НАБЛЮДЕНИЯ С УСТРОЙСТВОМ ИНДИКАЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2004 |
|
RU2254541C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЭКСПЛУАТАЦИОННЫХ ПАРАМЕТРОВ ТАНКА | 2000 |
|
RU2186327C1 |
| СТОЯНОЧНЫЙ ТОРМОЗ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2177889C2 |
| СПОСОБ ЗАЩИТЫ РЛС ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 1999 |
|
RU2153684C1 |
Изобретение относится к области артиллерийских систем самообороны транспортного средства. Технический результат - снижение влияния подстилающей поверхности на точностные характеристики радиолокационной станции и повышение вероятности поражения атакующих средств с одновременным увеличением их скоростного диапазона. Согласно изобретению система содержит радиолокационную станцию обнаружения и измерения траекторных параметров атакующего средства и боеприпасы, расположенные на верхних частях транспортного средства и формирующие круговую оборону. Каждый боеприпас размещен в пусковом устройстве и имеет метательный заряд и антиснаряд. Приемные каналы радиолокационной станции содержат блок разделения доплеровских частот и выбора сигнала с более высокой доплеровской частотой. 1 ил.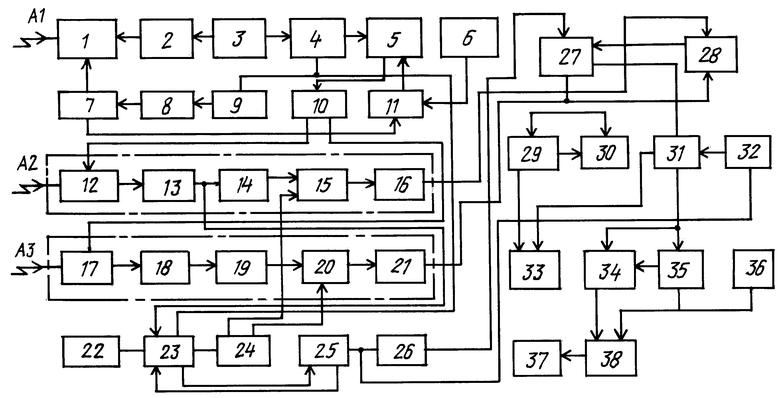
Система самообороны транспортного средства, содержащая радиолокационную станцию обнаружения и измерения траекторных параметров атакующего средства и боеприпасы, расположенные на верхних частях транспортного средства и формирующие круговую оборону, каждый боеприпас размещен в пусковом устройстве и имеет метательный заряд и антиснаряд, отличающаяся тем, что приемные каналы радиолокационной станции системы снабжены блоком разделения доплеровских частот и выбора сигнала с более высокой доплеровской частотой.
| СИСТЕМА САМООБОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2102678C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МНОГОЛЕЗВИЙНЫХ РЕЖУЩИХ ИНСТРУМЕНТОВ | 2006 |
|
RU2306208C1 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 1998 |
|
RU2135924C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ШЛАКОВОГО РАСПЛАВАВ КОВШЕ | 0 |
|
SU292912A1 |
| СОЕДИНИТЕЛЬНЫЙ УЗЕЛ ЦЕПИ | 2015 |
|
RU2695467C1 |

