Область техники у к которой относится изобретение
Настоящее изобретение в целом относится к досмотровой системе для проверки груза с помощью радиационного излучения. А именно, настоящее изобретение относится к рентгеновской досмотровой системе, приспособленной для осмотра груза на поддонах, авиационного груза в контейнерах или другого крупногабаритного груза.
Уровень техники
Досмотровая система для крупногабаритного авиационного груза в контейнерах является той досмотровой системой, в которой остро нуждается таможенная служба в аэропортах. В настоящее время крупногабаритный авиационный груз досматривается путем вскрытия грузового контейнера, содержащего крупногабаритный авиационный груз, или же его просвечиванием с помощью рентгеновской установки.
Однако досмотровая операция, заключающаяся во вскрытии контейнера с грузом, является затратной по времени и низкоэффективной, а обходится дорого. Досмотр же груза с использованием рентгеновской установки выполняется просвечиванием этого груза с целью получения его отображения. Однако, поскольку лучи рентгеновской установки имеют низкую мощность и слабую проницаемость и ими можно четко просветить только ту часть груза, которая находится на определенном удалении от источника излучения, то качество отображения и диапазон применения такой установки не отвечают требованиям досмотра.
Соответственно, в документе в CN 1405555A, поданном заявителем настоящей заявки, раскрывается система досмотра груза, озаглавленная как «Система досмотра авиационных грузов в контейнерах/грузов на поддонах». Эта система досмотра грузов включает выполненную в форме перевернутой буквы U раму, состоящую из источника радиационного излучения, детекторного устройства, коллиматора, прилегающей стойки и вертикальной стойки с детектором; комбинированную транспортировочную систему, состоящую из главного пластинчатого конвейера и вспомогательного роликового конвейера; систему защиты от радиации, приборный отсек, пункт управления и т.д.
Во время погрузки груза, находящегося в авиационном контейнере/на грузовом поддоне, когда поверхность основания этого авиационного грузового контейнера/грузового поддона входит в контакт с роликами на самой крайней стороне погрузочного роликового стола, приводится в действие вспомогательный роликовый конвейер и тогда эти ролики транспортируют данный груз на главный пластинчатый конвейер. Этот главный пластинчатый конвейер перемещает груз, чтобы тот прошел зону под сканирующей рамой.
Однако в вышеупомянутой обычной системе досмотра высота вспомогательного роликового конвейера, как и главного пластинчатого конвейера, остается постоянной. Таким образом, чтобы транспортировать груз от грузовика к вспомогательному роликовому конвейеру и затем, после того, как этот груз будет досмотрен, доставить его назад, требуется задействовать дополнительный буксировочный транспорт, такой как вилочный погрузчик или двухосный автомобильный прицеп. Поэтому при эксплуатации вышеупомянутой обычной досмотровой системы на обоих концах системы ее оборудования необходимо оставить свободное пространство для подъезда и выруливания буксировочного транспорта, что приводит к увеличению площади, занимаемой данной системой оборудования.
Исходя из сказанного вышеупомянутая обычная радиационная досмотровая система имеет следующие технические недостатки. Эта система занимает сравнительно большое пространство, а требуемое для нее дополнительное оборудование является технически сложным, к тому же ее трудно скомпоновать с другим оборудованием, ее эксплуатационные расходы весьма высоки и она также не подходит для погрузочной площадки с ограниченным пространством.
Сущность изобретения
В воплощении настоящего изобретения предлагается досмотровая система для досмотра груза, которая занимает меньше площади, не задействует при этом буксировочный транспорт и отлично компонуется с другим оборудованием, имеет более низкие эксплуатационные расходы и более широкие возможности применения; или же она обладает, по меньшей мере, одним из вышеперечисленных преимуществ.
Соответственно, согласно одному из аспектов настоящего изобретения, предлагается досмотровая система для досмотра груза с помощью радиационного излучения, включающая: главный пластинчатый конвейер; радиационное сканирующее устройство, в зону облучения которого попадает указанный главный пластинчатый конвейер, и при этом данное устройство располагается над указанным главным пластинчатым конвейером, на котором размещается предназначенный для сканирования груз; вспомогательные конвейеры, устроенные, соответственно, на переднем и заднем концах указанного главного пластинчатого конвейера, чтобы погрузить предназначенный для досмотра груз на указанный главный пластинчатый конвейер и затем выгрузить досмотренный груз с указанного главного пластинчатого конвейера; и подъемные устройства для подъема указанных вспомогательных конвейеров.
В предпочтительном варианте воплощения указанные вспомогательные конвейеры являются роликовыми конвейерами.
При этом каждое из указанных подъемных устройств включает: верхнюю платформу, которая поддерживает указанный роликовый конвейер на верхней поверхности этой верхней платформы и которая снабжена проходящим в продольном направлении верхним желобком скольжения; нижнюю платформу, которая снабжена проходящим в продольном направлении нижним желобком скольжения, который соответствует верхнему желобку скольжения; рычажный механизм, включающий первый передаточный рычаг и второй передаточный рычаг, где первый указанный передаточный рычаг и второй указанный передаточный рычаг поворотно соединены друг с другом в соответствующих главных центрах своих продольных направлений, и при этом верхний конец первого передаточного рычага и нижний конец второго передаточного рычага поворотно присоединены к верхней платформе и к нижней платформе соответственно, а нижний конец первого передаточного рычага и верхний конец второго передаточного рычага входят в скользящее сцепление соответственно с нижним указанным желобком скольжения и верхним указанным желобков скольжения; и пусковой механизм, который заставляет первый указанный передаточный рычаг и второй указанный передаточный рычаг поворачиваться относительно друг друга так, что в результате верхняя платформа поднимается и опускается.
Кроме этого, нижний конец первого передаточного рычага и верхний конец второго передаточного рычага снабжены направляющими колесами, которые входят в скользящее сцепление с верхним желобком скольжения и нижним желобком скольжения.
При этом верхний указанный желобок скольжения выполнен на продольной боковой поверхности верхней платформы, а нижний указанный желобок скольжения выполнен на продольной боковой поверхности нижней платформы, которая размещена с той же стороны, что и продольная боковая поверхность верхней платформы, и при этом верхний конец первого передаточного рычага и нижний конец второго передаточного рычага шарнирно прикреплены к продольным боковым поверхностям верхней и нижней платформ соответственно.
Предпочтительно, чтобы один конец указанного пускового механизма имел поворотное соединение у нижнего конца второго передаточного рычага, а другой его конец имел поворотное соединение в месте, находящемся между верхним концом первого передаточного рычага и продольным центром этого первого передаточного рычага.
Далее указанный пусковой механизм включает гидравлический цилиндр или пневматический цилиндр. В альтернативном варианте указанный пусковой механизм включает: ходовой винт; винтовую муфту, которая сцеплена с ходовым винтом, так что эта винтовая муфта может продольно перемещаться относительно данного ходового винта при вращении этого ходового винта; а также двигатель для обеспечения вращения этого ходового винта. Помимо этого указанный пусковой механизм включает телескопическую штангу.
Предпочтительно, чтобы указанное радиационное сканирующее устройство включало: источник радиационного излучения, расположенный у первой стороны главного пластинчатого конвейера; коллиматор, расположенный между источником радиационного излучения и первой стороной главного пластинчатого конвейера и предназначенный для преобразования лучей, испускаемых из источника радиационного излучения; вертикальную рамочную стойку, которая установлена на второй стороне указанного главного пластинчатого конвейера, напротив первой стороны главного пластинчатого конвейера, и при этом она снабжена первым детекторным устройством, которое принимает лучи, испущенные радиационным источником и преобразованные коллиматором; а также горизонтальную или поперечную стойку, один конец которой соединен с верхним концом вертикальной рамочной стойки, а другой ее конец накрывает главный пластинчатый конвейер так, чтобы быть соединенным с коллиматором; таким образом, данная вертикальная рамочная стойка, горизонтальная рамочная стойка и коллиматор составляют раму в форме перевернутой буквы U, и при этом данная горизонтальная рамочная стойка снабжена вторым детекторным устройством, которое принимает лучи, испущенные источником радиационного излучения и преобразованные коллиматором.
Кроме того, согласно настоящему изобретению досмотровая система дополнительно включает стенку для защиты от радиации, которая находится снаружи от рамы, имеющей форму перевернутой буквы U, на второй стороне главного пластинчатого конвейера и служит защитой от радиационных лучей.
Помимо этого, защитные рамы могут иметься и на удалении от указанного главного пластинчатого конвейера, то есть на концах указанных вспомогательных конвейеров.
В предпочтительном варианте система досмотра, выполненная согласно настоящему изобретению, дополнительно включает тяговое устройство, находящееся на концах верхних указанных платформ рядом с главным указанным пластинчатым конвейером, при этом каждое из этих тяговых устройств включает: барабан; двигатель для вращения данного барабана и тяговый канат, один конец которого намотан на указанный барабан, а другой его конец тянет предназначенный для досмотра груз таким образом, чтобы этот груз втягивался на вспомогательные конвейеры.
Согласно варианту воплощения настоящего изобретения, указанным источником радиационного излучения может быть рентгеновская трубка и источник изотопного излучения.
В альтернативном варианте каждое из указанных подъемных устройств включает: платформу для обеспечения опоры указанного вспомогательного конвейера и гидравлический цилиндр, расположенный под этой платформой и используемый для поддержки и подъема указанной платформы.
В альтернативном варианте, каждое из указанных подъемных устройств включает: платформу для обеспечения опоры указанного вспомогательного конвейера и передающий механизм для ходового винта, включающий ходовой винт, двигатель для обеспечения работы ходового винта и гайку, сцепленную с ходовым винтом и прикрепленную к поверхности основания указанной платформы так, чтобы указанная гайка перемещалась вдоль ведущего винта, поднимая тем самым указанную платформу и указанный вспомогательный конвейер, когда двигатель вращения ведущего винта запущен.
В соответствии с приведенным вариантом воплощения настоящего изобретения, в котором задействованы вспомогательные конвейеры, способные быть поднятыми, необходимость в использовании буксировочного транспорта отпадает. Кроме того, данная досмотровая система имеет преимущества в том, что она занимает меньшее пространство, ее эксплуатационные расходы менее затратны, она отлично компонуется с другим оборудованием, может найти широкое применение и при этом приспособлена для досмотра без вскрытия авиационного контейнерного груза, груза на поддонах или другого груза, перевозимого автомобильным, железнодорожным, портовым и другим транспортом.
Краткое описание чертежей
Эти и/или другие аспекты и преимущества настоящего изобретения станут более очевидными из следующего подробного описания предпочтительных вариантов воплощений при их рассмотрении вместе с сопровождающими чертежами.
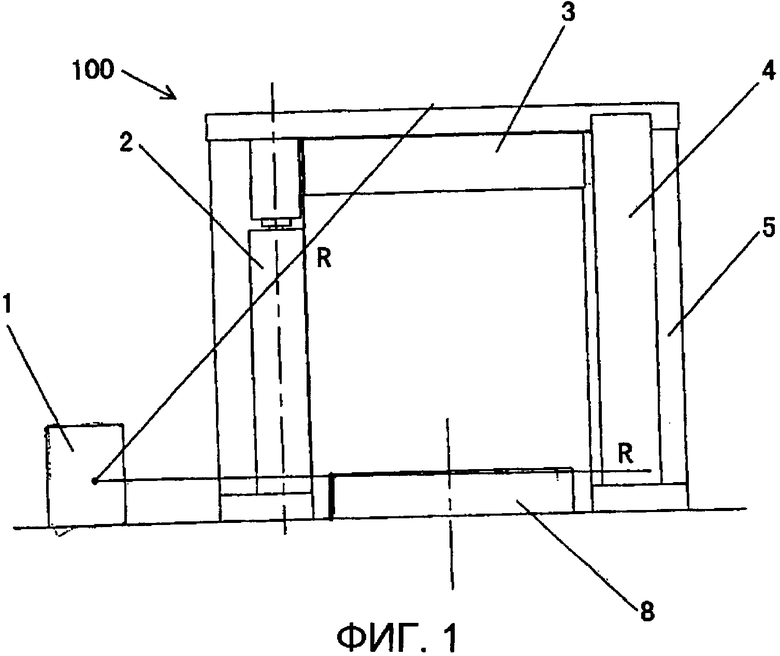
Фиг.1 - схематичный чертеж радиационной досмотровой системы согласно одному варианту воплощения настоящего изобретения, где главным образом показан радиационный сканер, относящийся к системе радиационного досмотра.
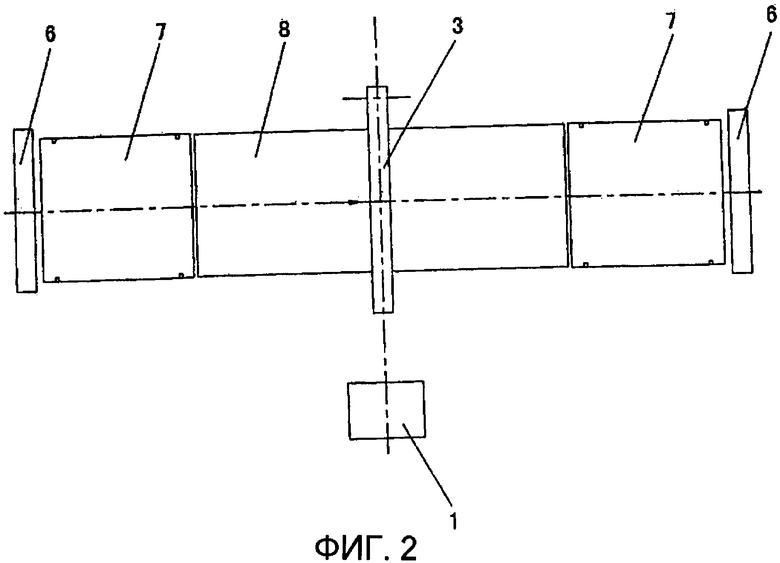
Фиг.2 - вид сверху системы радиационного досмотра, показанной на фиг.1, где эта система радиационного досмотра повернута на 90 угловых градусов.
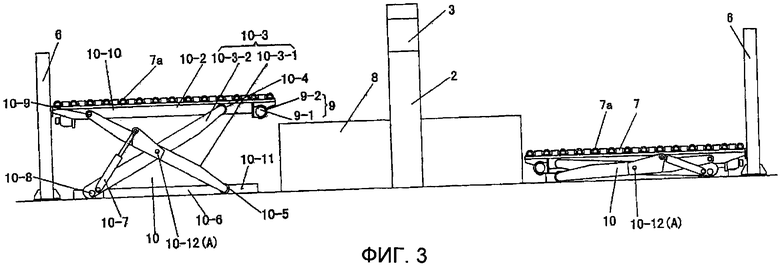
Фиг.3 - схематичный чертеж системы радиационного досмотра согласно варианту воплощения настоящего изобретения, где главным образом показан роликовый конвейер и его подъемное устройство.
Фиг.4 - схематичный чертеж системы радиационного досмотра согласно варианту воплощения настоящего изобретения, где система радиационного досмотра показана в рабочем состоянии.
Подробное описание предпочтительных вариантов воплощений
Далее будут следовать подробные ссылки на варианты воплощений настоящего изобретения, примеры которых проиллюстрированы на данных чертежах, на которых одинаковые ссылочные номера относятся к подобным элементам на всех чертежах. Описанные ниже варианты воплощений служат для того, чтобы пояснить особенности настоящего изобретения, ссылаясь на настоящие чертежи.
На фиг.1-4 показана выполненная согласно настоящему изобретению досмотровая система 100, которая проверяет авиационный груз в контейнерах, на поддонах, а также другой крупногабаритный груз с помощью радиационного излучения, например рентгеновского излучения, и которая при этом включает главный пластинчатый конвейер 8, радиационное сканирующее устройство, вспомогательные конвейеры 7 и подъемные механизмы 10.
А именно, на фиг.1 показано радиационное сканирующее устройство, в зону облучения которого попадает главный пластинчатый конвейер 8, чтобы сканировать груз, доставленный на главный пластинчатый конвейер 8. Например, главный пластинчатый конвейер 8 несет и перемещает груз в направлении D, обозначенном стрелкой на фиг.4, с целью прохода через радиационное сканирующее устройство, чтобы сканировать данный груз и получить его изображение, выполняя, таким образом, операцию по его досмотру. В альтернативном варианте главный пластинчатый конвейер 8 может нести и перемещать груз в направлении, противоположном направлению D, чтобы таким образом пройти через радиационное сканирующее устройство, или же совершить возвратно-поступательное движение груза в направлении D и в обратном ему направлении, чтобы пройти через радиационное сканирующее устройство для повторного досмотра груза.
Как показано на фиг.2-4, вспомогательные конвейеры 7 установлены спереди (левая сторона на фиг.2-4) и позади (правая сторона на фиг.2-4) главного пластинчатого конвейера 8, чтобы, соответственно, загрузить подлежащий досмотру груз на главный пластинчатый конвейер 8 и сгрузить досмотренный груз с главного пластинчатого конвейера 8.
С целью облегчения описания в варианте воплощения настоящего изобретения, показанном на фиг.2-4, вспомогательный конвейер, расположенный слева от главного пластинчатого конвейера 8, называется вспомогательным погрузочным конвейером, который служит для погрузки груза на главный пластинчатый конвейер 8; а вспомогательный конвейер, находящийся справа от главного пластинчатого конвейера 8, называется вспомогательным разгрузочным конвейером, который служит для выгрузки груза с главного пластинчатого конвейера 8. Однако поскольку главный пластинчатый конвейер 8 может перемещать груз, проходя через радиационное сканирующее устройство, совершая при этом возвратно-поступательное движение, чтобы подвергнуть данный груз повторному досмотру, то термины «погрузочный» и «разгрузочный» использованы только с иллюстративной целью и для настоящего изобретения они не являются ограничительными. Например, в альтернативном варианте на фиг.2-4, вспомогательный конвейер, размещенный слева от главного пластинчатого конвейера 8, используется для выгрузки груза с главного пластинчатого конвейера 8, а вспомогательный конвейер, расположенный справа от главного пластинчатого конвейера 8, используется для погрузки груза на главный пластинчатый конвейер 8.
Как можно видеть на фиг.3 и 4, вспомогательные конвейеры являются роликовыми конвейерами. Однако вспомогательные конвейеры 7 не ограничены только роликовыми конвейерами, а могут быть представлены, например, пластинчатыми конвейерами или любыми другими подходящими конвейерами.
Подъемные механизмы 10 используются, соответственно, для подъема вспомогательных конвейеров 7, так что высота вспомогательных конвейеров 7 может быть отрегулирована, чтобы находиться на том же уровне, как и главный пластинчатый конвейер 8, чтобы загрузить груз на главный пластинчатый конвейер 8 с вспомогательных конвейеров 7 или выгрузить груз на вспомогательные конвейеры 7 с главного пластинчатого конвейера 8; или же высота вспомогательных конвейеров 7 может быть отрегулирована таким образом, чтобы быть ниже или выше, чем главный пластинчатый конвейер 8. Следует отметить, что высота вспомогательных конвейеров, размещенных по обеим сторонам главного пластинчатого конвейера 8, регулируется по отдельности.
Как показано на фиг.3 и 4, каждое из подъемных устройств 10 включает верхнюю платформу 10-2, нижнюю платформу 10-6, рычажный механизм 10-3 и пусковой механизм 10-7.
Верхняя платформа 10-2 используется в качестве поддерживающей опоры для вспомогательного роликового конвейера 7, находящегося на ее верхней поверхности, и эта платформа снабжена проходящим по ней в продольном направлении верхним желобком скольжения 10-10. На верхней платформе 10-2 расположены ролики 7а и другие компоненты вспомогательного конвейера 7. Нижняя платформа 10-6 снабжена проходящим по ней в продольном направлении нижним желобком скольжения 10-11, который соответствует верхнему желобку скольжения 10-10.
Рычажный механизм 10-3 включает первый передаточный рычаг 10-3-1 и второй передаточный рычаг 10-3-2. Первый передаточный рычаг 10-3-1 и второй передаточный рычаг 10-3-2 поворотно соединены друг с другом в главных центрах А, лежащих на продольном направлении, например, штырем 10-12. Верхний конец первого передаточного рычага 10-3-1 (то есть, тот конец, который находится на удалении от главного пластинчатого конвейера 8) поворотно присоединен к верхней платформе 10-2, например, с помощью штыря 10-9, и нижний конец второго передаточного рычага 10-3-2 (то есть, тот конец, который находится на удалении от главного пластинчатого конвейера 8) поворотно присоединен (в этом варианте воплощения шарнирно) к нижней платформе 10-6, например, с помощью штыря 10-8, в то время как нижний конец первого передаточного рычага 10-3-1 (то есть, тот конец, который находится рядом с главным пластинчатым конвейером 8) и верхний конец второго передаточного рычага 10-3-2 (то есть, тот конец, который находится рядом с главным пластинчатым конвейером 8) находятся в скользящем сцеплении с нижним желобком скольжения 10-10 и с верхним желобком скольжения 10-11 соответственно.
Предпочтительно, чтобы нижний конец первого передаточного рычага 10-3-1 и верхний конец второго передаточного рычага 10-3-2 были снабжены направляющими колесами 10-5 и 10-4 соответственно. Направляющие колеса 10-4 и 10-5 входят в скользящее сцепление с верхним желобком скольжения 10-10 и нижним желобком скольжения 10-11 так, что нижний конец первого передаточного рычага 10-3-1 и верхний конец второго передаточного рычага 10-3-2 могут скользить в пределах верхнего желобка скольжения 10-10 и нижнего желобка скольжения 10-11.
А именно, верхний желобок скольжения 10-10 выполнен на первой боковой поверхности верхней платформы 10-2 (то есть, на нижней стороне этой поверхности, как показано на фиг.2), а нижний желобок скольжения 10-11 выполнен на первой боковой поверхности нижней платформы 10-6 (то есть, на нижней стороне этой поверхности, как показано на фиг.2). В то же время верхний конец первого передаточного рычага 10-3-1 и нижний конец второго передаточного рычага 10-3-2 шарнирно присоединены к первой боковой поверхности верхней платформы 10-2 и нижней платформы 10-6 с помощью штырей 10-9 и 10-8 соответственно. Однако квалифицированному специалисту в данной области будет понятно, что расположение верхнего желобка скольжения и нижнего желобка скольжения не ограничено боковыми поверхностями верхней и нижней платформы и что и верхний желобок скольжения, и нижний желобок скольжения могут, например, быть выполнены на нижних поверхностях верхней платформы и нижней платформы соответственно. Кроме того, эти желобки скольжения могут быть выполнены в любом подходящем количестве.
Следует отметить, что подъемные устройства для подъема вспомогательных конвейеров 7 не ограничены конструкцией, представленной в вышеупомянутым варианте воплощения, и специалист в данной области может решить проблему подъема вспомогательных конвейеров любым подходящим способом. Например, верхняя платформа 10-2 может опираться на гидравлический цилиндр или на ходовой винт и подниматься при приведении в действие этого гидравлического цилиндра или при вращении ходового винта, так что в результате вспомогательные конвейеры 7 могут быть подняты.
Пусковой механизм 10-7 заставляет первый передаточный рычаг 10-3-1 и второй передаточный рычаг 10-3-2 поворачиваться относительно друг друга вокруг штыря 10-12, так что в результате верхняя платформа 10-2 поднимается и опускается относительно нижней платформы 10-6.
А именно, как показано на фиг.3 и фиг.4, один конец пускового механизма 10-7 (нижний конец на фиг.3) поворотно присоединен у нижнего конца второго передаточного рычага 10-3-2, а другой его конец поворотно присоединен в месте между верхним концом первого передаточного рычага 10-3-1 и продольным центром А первого передаточного рычага.
Как показано в левой части фиг.3, когда штанга гидравлического цилиндра вытягивается, первый передаточный рычаг 10-3-1 и второй передаточный рычаг 10-3-2 поворачиваются относительно друг друга вокруг штыря 10-12 так, что расстояние между верхним концом первого передаточного рычага 10-3-1 и нижним концом второго передаточного рычага 10-3-2 и расстояние между нижним концом первого передаточного рычага 10-3-1 и верхним концом второго передаточного рычага 10-3-2 увеличиваются, и в то же время нижний конец первого передаточного рычага 10-3-1 и верхний конец второго передаточного рычага 10-3-2 скользят в пределах нижнего желобка скольжения 10-11 и верхнего желобка скольжения 10-10, чтобы, отсоединившись от главного пластинчатого конвейера 8, верхняя платформа 10-2 смогла подняться относительно нижней платформы 10-6.
И наоборот, как показано в правой части фиг.3, когда штанга гидравлического цилиндра втягивается, верхняя платформа 10-2 опускается относительно нижней платформы 10-6. Таким образом, высота вспомогательных конвейеров 7 может регулироваться, чтобы находиться на одном уровне с главным пластинчатым конвейером 8 (как показано на фиг.4), или же быть ниже или выше этого главного пластинчатого конвейера 8 (как показано на фиг.3).
В варианте воплощения, показанном на фиг.3 и 4, пусковой механизм 10-7 представляет собой гидравлический цилиндр или пневматический цилиндр, но данное изобретение ими не ограничивается. Пусковой механизм 10-7 может также быть представлен телескопической штангой. В альтернативном варианте пусковой механизм 10-7 включает ходовой винт; винтовую муфту, которая сцеплена с ходовым винтом так, что эта винтовая муфта может продольно перемещаться относительно ходового винта при вращении этого ходового винта; а также двигатель для обеспечения вращения этого ходового винта. В этом случае операция, выполняемая пусковым механизмом 10-7, является подобной той, что выполняет описанный выше гидравлический или пневматический цилиндр, поэтому подробное описание этой операции здесь опущено.
Подъемное устройство для подъема вспомогательного конвейера 7 не ограничено вышеупомянутым рычажным механизмом. В альтернативном варианте подъемное устройство может включать платформу (не показано), подобную верхней платформе 10-2, служащую опорой для вспомогательного конвейера 7, и гидравлический цилиндр, расположенный под этой платформой и служащий для подъема и опоры этой платформы. Для этой цели могут, согласуясь с практическими требованиями, применяться различные гидравлические цилиндры. Более того, вместо вышеупомянутого гидравлического цилиндра может использоваться передаточный механизм с ходовым винтом. Этот передаточный механизм с ходовым винтом может включать ходовой винт, двигатель для этого ходового винта, гайку, сцепленную с этим ходовым винтом и прикрепленную к поверхности основания платформы для обеспечения опоры вспомогательному конвейеру 7. Когда двигатель запущен, ходовой винт вращается, так что данная гайка перемещается вдоль ходового винта, заставляя, таким образом, платформу и вспомогательный конвейер 7 подниматься. Специалист в данной области легко поймет вышеизложенное, и поэтому его подробное описание опускается.
В соответствии с вариантом воплощения настоящего изобретения, показанном на фиг.1 и 2, радиационное сканирующее устройство включает источник радиации 1, такой как рентгеновская трубка и источник изотопного излучения, коллиматор 2, вертикальную рамочную стойку 4 и горизонтальную или поперечную рамочную стойку 3. Предпочтительно, чтобы радиационное сканирующее устройство дополнительно включало защитную стенку 5 от радиационного излучения.
А именно, радиационной источник 1 находится у первой стороны главного пластинчатого конвейера 8 (левая сторона на фиг.1, то есть нижняя сторона на фиг.2) и излучает лучи R. Следует заметить, что хотя на фиг.1 лучи R обозначены двумя прямыми линиями, луч, испускаемый из источника радиационного излучения 1, преобразуется коллиматором 2 в плоский пучок.
Коллиматор 2 находится между источником радиационного излучения 1 и первой стороной главного пластинчатого конвейера 8, и при этом он предназначен преобразовывать лучи R, испускаемые из источника радиационного излучения 1.
Вертикальная рамочная стойка 4 располагается у второй стороны главного пластинчатого конвейера 8 (левая сторона на фиг.1, то есть верхняя сторона на фиг.2), напротив первой стороны главного пластинчатого конвейера 8, при этом эта вертикальная рамочная стойка оборудована первым детекторным устройством (не показано), которое принимает лучи R, излученные из источника радиационного излучения 1 и преобразованные коллиматором 2.
Один конец горизонтальной рамочной стойки 3 (правый конец на фиг.1) соединен с верхним концом вертикальной рамочной стойки 4, а другой ее конец покрывает главный пластинчатый конвейер 8, чтобы соединиться с коллиматором 2, то есть этот коллиматор 2 опирается на другой конец горизонтальной рамочной стойки 3, так что вертикальная рамочная стойка 4, горизонтальная рамочная стойка 3 и коллиматор 2 составляют рамочную конструкцию в форме перевернутой буквы U. При этом горизонтальная рамочная стойка 3 оборудована вторым детекторным устройством (не показано), которое принимает лучи R, излученные из источника радиационного излучения 1 и преобразованные коллиматором 2.
Защитная стенка 5 от радиационного излучения расположена у второй стороны главного пластинчатого конвейера 8 и снаружи от рамы в виде перевернутой буквы U, чтобы служить защитой от лучей R (включая лучи, образуемые в результате рассеивания, преломления и других подобных процессов).
В альтернативном варианте досмотровая система 100 согласно варианту воплощения настоящего изобретения дополнительно включает защитные рамы 6, которые установлены, соответственно, на концах вспомогательных конвейеров 7, не контактирующих с главным пластинчатым конвейером 8, чтобы предотвратить падение груза с этих вспомогательных конвейеров 7.
В альтернативном варианте досмотровая система 100 согласно варианту воплощения настоящего изобретения дополнительно включает тяговые устройства 9, которые расположены, соответственно, на концах верхней платформы 2 рядом с главным пластинчатым конвейером 8 и служат для доставки (загрузки) груза на вспомогательные конвейеры.
А именно, каждое из тяговых устройств 9 включает барабан 9-1, двигатель (не показано) для вращения барабана 9-1 и тяговый канат 9-2. Один конец тягового каната 9-2 намотан на барабан 9-1, а другой его конец тянет подлежащий досмотру груз, так что этот груз попадает на вспомогательный конвейер или снимается со вспомогательного конвейера.
Следует отметить, что досмотровая система, выполненная согласно настоящему изобретению, дополнительно включает модуль управления сканированием, модуль фиксирования изображения, контрольное устройство, блок обработки данных и блок управления. Эти компоненты являются такими же, как и те, что используются на предшествующем уровне техники, и поэтому их подробное описание опущено.
Далее приводится объяснение операций по досмотру груза с использованием радиационной досмотровой системы, выполняемых в соответствии с воплощением настоящего изобретения.
(1) Первая операция заключается в том, что досмотровая система включается для разогрева, после чего она находится в режиме готовности к работе.
(2) Вспомогательный погрузочный роликовый конвейер 7 (например, вспомогательный конвейер 7 слева на фиг.2-4) устанавливается регулировкой на соответствующую высоту с помощью подъемного механизма 10 так, что на этот вспомогательный конвейер 7 может быть установлен груз.
(3) Груз в контейнере втягивается на вспомогательный роликовый погрузочный конвейер 7 тяговым устройством 9 или вручную.
(4) Вспомогательный погрузочный роликовый конвейер 7 устанавливается вровень с главным пластинчатым конвейером 8, как это показано на фиг.4.
(5) Вспомогательный погрузочный роликовый конвейер 7 запускается для перемещения груза на главный пластинчатый конвейер 8, затем главный пластинчатый конвейер 8 перемещает этот полученный груз в направлении D, чтобы он прошел через радиационное сканирующее устройство; когда этот груз проходит через плоскость луча, поступают данные о его сканировании, которые затем передаются в центр обработки данных, чтобы получить изображение груза в реальном времени.
(6) Когда груз уже прошел через плоскость луча, его изображение на дисплее прекращается, и проверенный таким образом груз транспортируется на вспомогательный разгрузочный роликовый конвейер 7 (вспомогательный конвейер справа на фиг.2-4) с главного пластинчатого конвейера 8, и при этом высота вспомогательного разгрузочного роликового конвейера 7 является той же самой, что и высота главного пластинчатого конвейера 8.
(7) Высота вспомогательного разгрузочного роликового конвейера 7 подгоняется до соответствующего уровня, и затем груз с него удаляется.
Если проводящий досмотр служащий, наблюдая за отображением груза, решит, что этот груз следует подвергнуть вторичному досмотру, то груз, находящийся на вспомогательном роликовом разгрузочном конвейере 7, подается при помощи устройства управления назад, на главный пластинчатый конвейер 8, и затем этот главный пластинчатый конвейер 8 перемещает этот груз в направлении, противоположном направлению D, чтобы он снова мог пройти через радиационное сканирующее устройство с целью его повторного досмотра; или же этот груз может быть выгружен, а грузовой контейнер затем открыт для досмотра этого груза. Груз также может быть повторно досмотрен с изменением его расположения или под другим углом с целью улучшения точности данных досмотра, как это показано на фиг.4.
Хотя в данном тексте был описан один вариант воплощения настоящего изобретения, специалисты в данной области могут понять, что в это воплощение могут быть внесены изменения, не противоречащие при этом духу и букве настоящего изобретения, рамки которого определены в формуле изобретения и равнозначных ей документах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРОВЕРКИ ТРЕЙЛЕРОВ | 2008 |
|
RU2402075C2 |
| ТОМОГРАФИЧЕСКАЯ СКАНИРУЮЩАЯ ДОСМОТРОВАЯ УСТАНОВКА И СПОСОБ СКАНИРОВАНИЯ | 2008 |
|
RU2383882C2 |
| УСТАНОВКА И СПОСОБ ОБНАРУЖЕНИЯ КОНТРАБАНДЫ В АВИАЦИОННЫХ ГРУЗОВЫХ КОНТЕЙНЕРАХ | 2008 |
|
RU2390006C1 |
| УСТАНОВКА ДЛЯ ОБНАРУЖЕНИЯ КОНТРАБАНДЫ В АВИАЦИОННЫХ ГРУЗОВЫХ КОНТЕЙНЕРАХ | 2008 |
|
RU2390761C1 |
| СПОСОБ ДОСМОТРА ГРУЗОВ С ИСПОЛЬЗОВАНИЕМ ПРОСВЕЧИВАНИЯ ИЗЛУЧЕНИЕМ ПОД РАЗНЫМИ УГЛАМИ | 2007 |
|
RU2400735C2 |
| Система досмотра транспортных средств, перемещающихся своим ходом, включая находящихся в транспортных средствах грузы, пассажиров и водителя, способ автоматического радиоскопического контроля движущихся объектов и зоны радиационного сканирования и способ формирования теневого изображения инспектируемого объекта | 2018 |
|
RU2716039C1 |
| СПОСОБ ДОСМОТРА И ДОСМОТРОВЫЙ КОМПЛЕКС | 2012 |
|
RU2512679C1 |
| МОБИЛЬНАЯ КОНСОЛЬНАЯ СИСТЕМА ДВЕРНОГО ТИПА ДЛЯ ДОСМОТРА ГРУЗОВИКОВ-КОНТЕЙНЕРОВОЗОВ | 2007 |
|
RU2381490C2 |
| УСТРОЙСТВО ДЕТЕКТИРОВАНИЯ | 2009 |
|
RU2402013C1 |
| СТАЦИОНАРНЫЙ ДОСМОТРОВЫЙ КОМПЛЕКС | 2016 |
|
RU2623835C1 |
Использование: для проверки груза с помощью радиационного излучения. Сущность: заключается в том, что досмотровая система для досмотра груза с помощью радиационного излучения включает: главный пластинчатый конвейер; радиационное сканирующее устройство, в зону облучения которого попадает указанный главный пластинчатый конвейер, и при этом оно располагается над указанным главным пластинчатым конвейером и служит для сканирования груза, доставленного на главный пластинчатый конвейер; вспомогательные конвейеры, которые расположены, соответственно, на переднем и заднем концах указанного главного пластинчатого конвейера, чтобы загрузить подлежащий досмотру груз на указанный главный пластинчатый конвейер и сгрузить проверенный груз с указанного главного пластинчатого конвейера; подъемные устройства для подъема указанных вспомогательных конвейеров, каждое из которых содержит верхнюю платформу, которая служит опорой для указанного вспомогательного конвейера, а также тяговые устройства, которые расположены на концах указанных верхних платформ рядом с указанным главным пластинчатым конвейером, при этом каждое из этих тяговых устройств включает: барабан; двигатель для обеспечения вращения барабана и тяговый канат, один конец которого намотан на указанный барабан, а другой его конец тянет подлежащий досмотру груз так, что этот груз втягивается на вспомогательные конвейеры или стягивается с этих вспомогательных конвейеров. Технический результат: уменьшение площади, занимаемой системой для досмотра груза, исключение необходимости задействовать буксировочный транспорт, а также обеспечение возможности отличной компоновки с другим оборудованием. 13 з.п. ф-лы, 4 ил.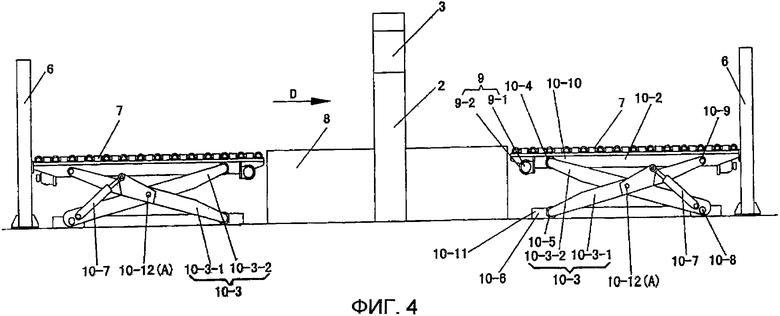
1. Досмотровая система для досмотра груза с помощью радиационного излучения, включающая
главный пластинчатый конвейер;
радиационное сканирующее устройство, в зону облучения которого попадает указанный главный пластинчатый конвейер, при этом оно располагается над указанным главным пластинчатым конвейером и служит для сканирования груза, доставленного на главный пластинчатый конвейер;
вспомогательные конвейеры, которые расположены, соответственно, на переднем и заднем концах указанного главного пластинчатого конвейера, чтобы загрузить подлежащий досмотру груз на указанный главный пластинчатый конвейер и сгрузить проверенный груз с указанного главного пластинчатого конвейера;
подъемные устройства для подъема указанных вспомогательных конвейеров, каждое из которых содержит верхнюю платформу, которая служит опорой для указанного вспомогательного конвейера, и
тяговые устройства, которые расположены соответственно на концах указанных верхних платформ рядом с указанным главным пластинчатым конвейером, при этом каждое из этих тяговых устройств включает
барабан;
двигатель для обеспечения вращения барабана; и
тяговый канат, один конец которого намотан на указанный барабан, а другой его конец тянет подлежащий досмотру груз так, что этот груз втягивается на вспомогательные конвейеры или стягивается с этих вспомогательных конвейеров.
2. Досмотровая система по п.1, в которой указанные вспомогательные конвейеры являются роликовыми конвейерами.
3. Досмотровая система по п.2, в которой указанная верхняя платформа служит опорой для указанного роликового конвейера на ее верхней поверхности, и которая снабжена верхним желобком скольжения, проходящим по ней в продольном направлении;
при этом каждое из подъемных устройств дополнительно содержит
нижнюю платформу, которая снабжена нижним желобком скольжения, проходящим по ней в продольном направлении, и при этом данный нижний желобок скольжения соответствует верхнему желобку скольжения;
рычажный механизм, включающий первый передаточный рычаг и второй передаточный рычаг, где первый указанный передаточный рычаг и второй указанный передаточный рычаг поворотно соединены друг с другом в соответствующих главных центрах, лежащих вдоль их продольных направлений, а верхний конец первого передаточного рычага и нижний конец второго передаточного рычага поворотно присоединены, соответственно, к верхней платформе и к нижней платформе, а нижний конец первого передаточного рычага и верхний конец второго передаточного рычага входят в скользящее сцепление, соответственно, в нижнем указанном желобке скольжения и верхнем указанном желобке скольжения; и
пусковой механизм для обеспечения поворота первого указанного передаточного рычага и второго указанного передаточного рычага относительно друг друга, в результате чего верхняя платформа поднимается и опускается.
4. Досмотровая система по п.3, в которой в нижнем конце первого передаточного рычага и в верхнем конце второго передаточного рычага размещены направляющие колеса, и эти направляющие колеса входят в скользящее сцепление с верхним желобком скольжения и нижним желобком скольжения, соответственно.
5. Досмотровая система по п.4, в которой верхний указанный желобок скольжения выполнен на продольной боковой поверхности верхней платформы, а нижний указанный желобок скольжения выполнен на продольной боковой поверхности нижней платформы, причем с той же самой боковой стороны, где по продольной боковой поверхности верхней платформы проходит верхний желобок скольжения, и при этом верхний конец первого передаточного рычага и нижний конец второго передаточного рычага шарнирно прикреплены к этим продольным боковым поверхностям верхней и нижней платформ, соответственно.
6. Досмотровая система по п.5, в которой один конец указанного пускового механизма имеет поворотное соединение у нижнего конца второго передаточного рычага, а другой его конец имеет поворотное соединение в месте между верхним концом первого передаточного рычага и продольным центром первого передаточного рычага.
7. Досмотровая система по п.6, в которой указанный пусковой механизм включает гидравлический цилиндр или пневматический цилиндр.
8. Досмотровая система по п.6, в которой указанный пусковой механизм включает
ходовой винт;
винтовую муфту, которая сцепляется с ходовым винтом так, что эта винтовая муфта может продольно перемещаться относительно ходового винта при вращении этого ходового винта; и
двигатель для обеспечения вращения ходового винта.
9. Досмотровая система по п.6, в которой указанный пусковой механизм включает телескопическую штангу.
10. Досмотровая система по любому из пп.1-9, в которой указанное радиационное сканирующее устройство включает
источник радиационного излучения, который находится у первой стороны главного пластинчатого конвейера и испускает лучи;
коллиматор, который находится между данным источником радиационного излучения и первой стороной главного пластинчатого конвейера и предназначен для преобразования лучей, испускаемых источником радиационного излучения;
вертикальную рамочную стойку, которая расположена у второй стороны указанного главного пластинчатого конвейера напротив первой стороны этого главного пластинчатого конвейера, и которая оборудована первым детекторным устройством, которое принимает лучи, излученные источником радиационного излучения и преобразованные коллиматором, и
горизонтальную, или поперечную, рамочную стойку, один конец которой соединен с верхним концом вертикальной рамочной стойки, а другой конец накрывает указанный главный пластинчатый конвейер таким образом, чтобы находиться в соединении с коллиматором так, что в результате вертикальная рамочная стойка, горизонтальная, или поперечная, рамочная стойка и коллиматор составляют раму в форме перевернутой буквы U, при этом данная горизонтальная, или поперечная, рамочная стойка оборудована вторым детекторным устройством, которое принимает лучи, излученные источником радиационного излучения и преобразованные коллиматором.
11. Досмотровая система по п.10, дополнительно включающая защитные рамы, которые устанавливаются на тех концах указанных вспомогательных конвейеров, которые находятся на удалении от указанного главного пластинчатого конвейера, соответственно.
12. Досмотровая система по п.10, в которой указанный источник радиационного излучения представляет собой рентгеновскую трубку или источник изотопного излучения.
13. Досмотровая система по п.1, в которой каждое из указанных подъемных устройств дополнительно содержит
гидравлический цилиндр, расположенный под указанной верхней платформой и используемый для поддержки и подъема указанной верхней платформы.
14. Досмотровая система по п.1, в которой каждое из указанных подъемных устройств дополнительно содержит
передаточное устройство с ходовым винтом, включающее
ходовой винт;
двигатель для вращения этого ходового винта, и
гайку, сцепленную с данным ходовым винтом и прикрепленную к поверхности основания указанной верхней платформы так, что указанная гайка может перемещаться вдоль ведущего винта, поднимая тем самым указанную верхнюю платформу и указанный вспомогательный конвейер, когда двигатель для обеспечения вращения ходового винта запущен.
| US 2004213374 A1, 28.10.2004 | |||
| US 4304518 A, 08.12.1981 | |||
| JP 8333094 A, 17.12.1996 | |||
| МОНТАЖНЫЙ ШЕВРОВЫЙ КРАН | 0 |
|
SU162643A1 |
| JP 60259434 A, 21.12.1985 | |||
| WO 2005015102 A2, 17.02.2005 | |||
| 0 |
|
SU271723A1 | |
| US 4978272 A, 18.12.1990 | |||
| СПОСОБ РЕНТГЕНОВСКОГО КОНТРОЛЯ ТЕЛА (ВАРИАНТЫ) И УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2000 |
|
RU2261465C2 |
| Подъемник | 1984 |
|
SU1239089A1 |
| Устройство для разрезки глиняного бруса на изделия | 1986 |
|
SU1447676A1 |

