ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к технологии управления с обратной связью для силовой установки и, в частности, оно относится к управлению механизмом с переменным подъемом и механизмом с переменными фазами, а также к регулированию соотношения воздух/топливо для двигателя внутреннего сгорания.
ПРЕДПОСЫЛКИ К СОЗДАНИЮ ИЗОБРЕТЕНИЯ
В случае когда силовая установка имеет характеристику с сильной нелинейностью, при использовании обыкновенного регулятора с линейной обратной связью типа PD, PID и т.п. управление с высокой точностью не может быть без труда реализовано из-за проблем слежения и/или стабильности. Например, в случае механизма с переменным подъемом в двигателе реализация высокой точности управления с обратной связью затруднена вследствие того, механизм с переменным подъемом имеет большое трение и нелинейную характеристику с гистерезисом, возникающим при увеличении/уменьшении величины подъема. Точно также механизм с переменными фазами, и/или механизм регулирования соотношения воздух/топливо для двигателя, и механизм управления исполнительным механизмом автоматической трансмиссии имеют сильную нелинейность.
Поскольку управление двигателем осуществляется путем реализации высокоточных операций каждым из многочисленных структурных элементов двигателя, то высокая точность для стабильности работы и возможности слежения требуется и в отношении структурных элементов, имеющих сильную нелинейность типа описанной выше. Таким образом, существует потребность в технологии управления и для силовой установки, имеющей характеристику с сильной нелинейностью.
Например, в заявке на патент Японии, опубликованной под №2001-152885, раскрывается технология управления с использованием контроллера со скользящим режимом работы, суть которой заключается в добавлении входного шумового сигнала. В этой технологии управления входной шумовой сигнал используется для коррекции регулируемой переменной, вычисляемой контроллером со скользящим режимом работы, и выполнения управления с обратной связью, обеспечивающего доведение выходного сигнала силовой установки до целевого значения. Эта обработка позволяет компенсировать снижение управляемости, обусловливаемое нелинейностью характеристики силовой установки типа трения или т.п.
Однако согласно вышеупомянутой технологии в случае, когда переключательная функция контроллера со скользящим режимом работы превышает пороговое значение, в регулируемую переменную добавляется только входной шумовой сигнал, имеющий определенную амплитуду. Другими словами, при приближении силовой установки к целевому значению (когда переключательная функция имеет значение ниже порогового) добавление входного шумового сигнала приостанавливается, так что процесс управления становится эквивалентным обычному управлению с обратной связью. Поэтому, несмотря на сглаживание участков характеристики в процессе управления с обратной связью, предотвратить запаздывания слежения и появления установившегося отклонения не удается. Кроме того, если для разрешения изложенной выше проблемы добавление шума используется даже в случае, когда переключательная функция не достигает порогового значения и амплитуда шумового сигнала задается большой, колебания могут возникать вокруг целевого значения.
Для реализации подобной технологии управления может быть использован алгоритм ΔΣ-модуляции (см., например, заявку на патент Японии, опубликованную под №2003-195908). В этой технологии в качестве входного сигнала управления используется модулированный сигнал, т.е. двоичный сигнал, получаемый в результате преобразования контрольного входного сигнала от контроллера. Согласно этой технологии, если силовая установка обладает способностью восстанавливать входные сигналы вкл./выкл., то обеспечивается возможность компенсации нелинейности характеристики и высокая точность регулирования выходного сигнала силовой установки независимо от степени ее чувствительности.
Однако чтобы реализовать управляемость с высокой точностью по всему диапазону значений контрольного входного сигнала, генерируемого контроллером, диапазон пульсаций модулированного сигнала должен быть больше, чем у контрольного входного сигнала. В результате в случае силовой установки типа механизма с переменным подъемом с большим диапазоном пульсаций и высокой скоростью изменения контрольного входного сигнала абсолютное значение генерируемого модулированного сигнала может стать большим. В таком случае даже по отношению к стабилизированному целевому значению существует возможность колебаний входного сигнала управления и, следовательно, выходного сигнала силовой установки.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
ПРОБЛЕМА, РЕШЕАЕМАЯ С ПОМОЩЬЮ ИЗОБРЕТЕНИЯ
Выше были предложены некоторые традиционные технологии управления для компенсации нелинейности характеристики силовой установки, однако при использовании таких технологий применительно к силовой установке с сильной нелинейностью характеристики по-прежнему существует проблема надежности. В частности, и для силовой установки с большими пульсациями регулируемой переменной требуется технология для реализации высокой точности управления.
Поэтому целью настоящего изобретения является создание технологии управления, обеспечивающей достаточную степень компенсации нелинейности характеристики силовой установки, имеющей характеристику с сильной нелинейностью, а также удовлетворение требованиям по обеспечению возможности слежения и стабильности для силовой установки с большими пульсациями регулируемых переменных.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В настоящем изобретении предлагается устройство для управления силовой установкой с использованием алгоритма модуляции. Контроллер имеет средство для вычисления предварительного входного сигнала управления, который используется для доведения выходного сигнала силовой установки до целевого значения, средство для деления предварительного входного сигнала управления на множество составляющих, средство модуляции, предназначенное для модуляции, по меньшей мере, одной из множества составляющих и средство для суммирования модулированной составляющей с другими составляющими с целью генерации входного сигнала управления. Согласно настоящему изобретению обеспечивается возможность минимизации пульсаций входного сигнала, вызываемых модуляцией, при сохранении возможности компенсации нелинейности характеристики силовой установки типа трения и/или гистерезиса, обусловливаемой традиционным алгоритмом модуляции. Это позволяет предотвратить колебания выходного сигнала силовой установки даже с большими пульсациями предварительного входного сигнала управления и, следовательно, обеспечивает повышение управляемости.
Согласно одному объекту настоящего изобретения составляющие, полученные в результате деления предварительного входного сигнала управления, включают в себя первую составляющую, вычисляемую путем фильтрации предварительного входного сигнала, и вторую составляющую, которая находится пределах определенного диапазона абсолютных значений разности между предварительным входным сигналом управления и первой составляющей. Вторая составляющая подвергается модуляции. Согласно этому объекту изобретения при сохранении способности к реагированию, которая может быть реализована с помощью предварительного входного сигнала управления, дополнительно обеспечивается возможность компенсации нелинейности характеристики, обусловливаемой традиционными алгоритмами модуляции. Минимизация амплитуды составляющей, подвергаемой модуляции, позволяет повысить разрешающую способность системы управления и подавить малые колебания выходного сигнала и обеспечивает повышение управляемости.
Согласно другому объекту настоящего изобретения фильтрация выполняется с помощью линейного фильтра или медианного фильтра. Согласно этому объекту изобретения в случае, когда предварительный входной сигнал управления имеет импульсовидные участки и/или участки с флуктуациями, обеспечивается возможность устранения таких участков в достаточной степени, позволяющая предотвратить снижение стабильности и/или управляемости системы управления.
Согласно дополнительному объекту настоящего изобретения фильтрация выполняется ε-фильтром. Согласно этому объекту изобретения в случае, когда предварительный входной сигнал управления имеет участки с флуктуациями, в достаточной степени обеспечивается возможность устранения таких участков, позволяющая предотвратить снижение устойчивости и/или управляемости системы управления.
В случае значительных ступенчатых изменений предварительного входного сигнала управления обеспечивается возможность сохранения такого участка, позволяющая повысить возможность слежения системы управления.
Согласно еще одному дополнительному объекту настоящего изобретения контроллер с использованием алгоритма модуляции может быть использован для механизма с переменным подъемом, механизма с переменными фазами или для регулирования соотношения воздух/топливо в двигателе или для автоматической трансмиссии. Согласно этому объекту изобретения обеспечивается возможность повышения точности управления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - блок-схема алгоритма ΔΣ-модуляции байпасного типа в соответствии с одним вариантом осуществления настоящего изобретения.
Фиг.2 - блок-схема нелинейного фильтра, используемого в одном варианте осуществления настоящего изобретения.
Фиг.3 - схематичное представление результатов процессов фильтрации контрольного входного сигнала каждым фильтром.
Фиг.4 - схематичное представление соотношения между составляющей с малыми пульсациями и составляющей с большими пульсациями по отношению к контрольному входному сигналу.
Фиг.5 - блок-схема системы управления механизмом с переменным подъемом, использующей ΔΣ-модулятор байпасного типа.
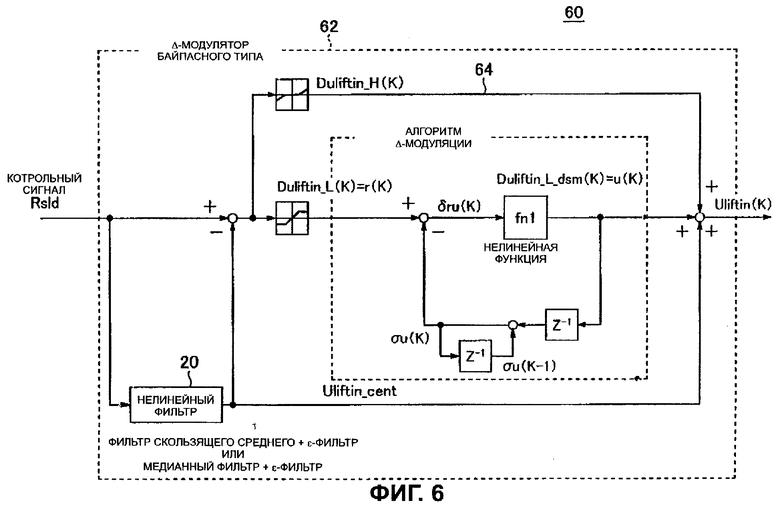
Фиг.6 - блок-схема Δ-модулятора байпасного типа.
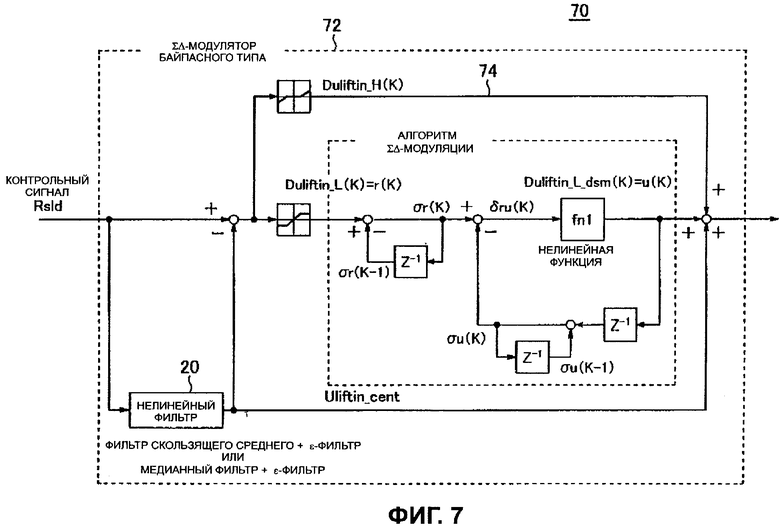
Фиг.7 - блок-схема ΔΣ-модулятора байпасного типа.
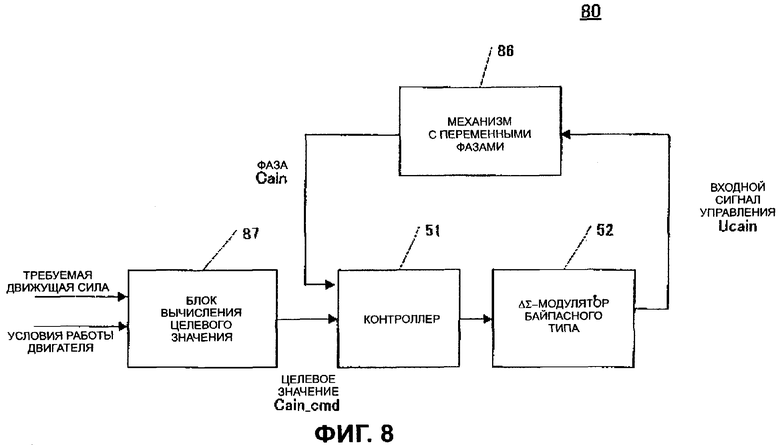
Фиг.8 - блок-схема системы с использованием ΔΣ-модулятора байпасного типа применительно к механизму с переменными фазами.
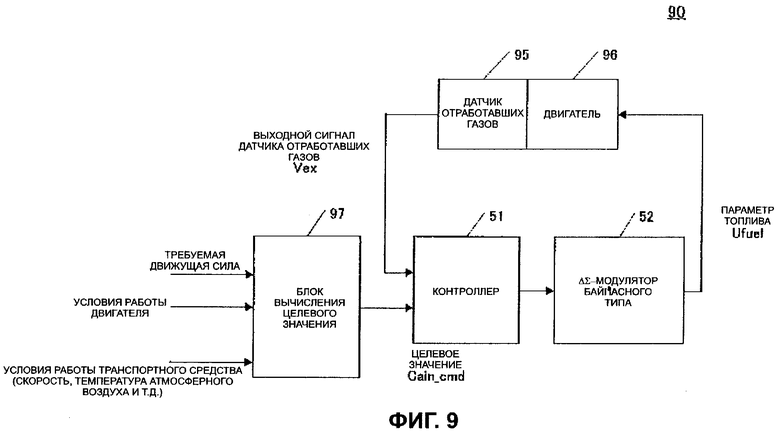
Фиг.9 - блок-схема системы с использованием ΔΣ-модулятора байпасного типа применительно к регулированию соотношения воздух/топливо.
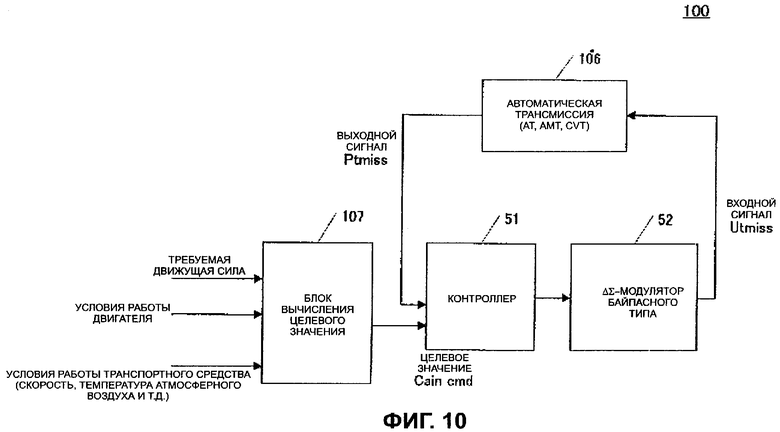
Фиг.10 - блок-схема системы с использованием ΔΣ-модулятора байпасного типа применительно к управлению исполнительным механизмом для автоматической трансмиссии.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ
Описание предпочтительных примеров осуществления настоящего изобретения будет вестись со ссылками на прилагаемые чертежи.
1. Технология управления механизмом с переменным подъемом в соответствии с одним вариантом осуществления настоящего изобретения
Алгоритм модуляции типа ΔΣ-модуляции или т.п. обладает высокой компенсирующей способностью по отношению к определенной нелинейности характеристики объекта управления типа гистерезиса, трения или т.п. Однако в случае большого диапазона изменений или высокой скорости пульсаций входного сигнала возникает проблема возможного получения на выходе управляющего сигнала, содержащего определенные колебания. Потребность в технологии управления с возможностью использования обеспечиваемого алгоритмом ΔΣ-модуляции эффекта компенсации нелинейности существует и для объекта управления со значительными изменениями входного сигнала.
В одном варианте осуществления настоящего изобретения объектом управления является механизм с переменным подъемом в двигателе. Механизм с переменным подъемом состоит из кулачка, тяги с переменным подъемом, верхней тяги и нижней тяги. Этот механизм имеет функцию регулировки максимальной величины подъема клапана путем изменения угла нижней тяги с помощью исполнительного механизма или т.п. Максимальная величина подъема клапана определяется в соответствии с режимом работы двигателя и/или требуемой движущей силы. В случае механизма с переменным подъемом диапазон пульсаций контрольного входного сигнала, обусловливаемых контроллером, является большим и составляет ±10 В, и скорость изменения является высокой. Для обеспечения компенсации пульсаций в таком диапазоне модулированный сигнал должен быть больше диапазона пульсаций контрольного входного сигнала. При этом вследствие колебаний регулируемой переменной может наблюдаться снижение точности управления.
В рассматриваемом варианте осуществления изобретения для разрешения этой проблемы при управлении механизмом с переменным подъемом используется алгоритм ΔΣ-модуляции байпасного типа. Ниже следует его подробное описание.
1.1 Схема алгоритма ΔΣ-модуляции байпасного типа
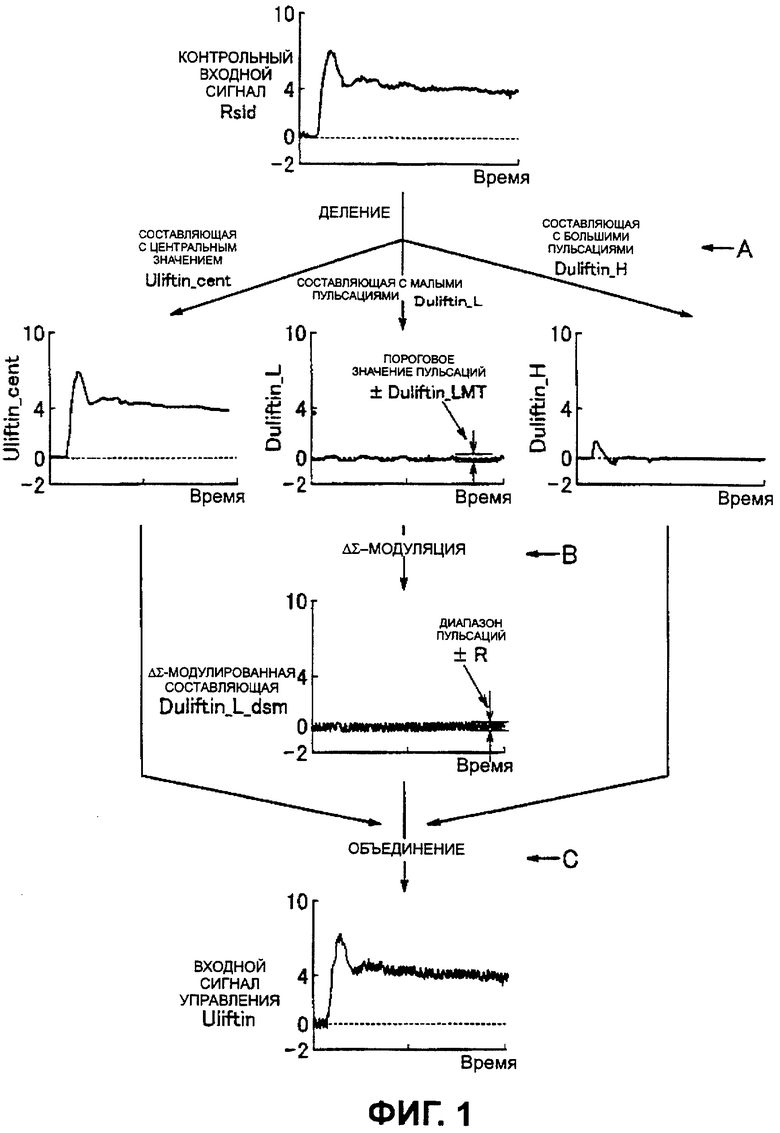
На фиг.1 представлена блок-схема алгоритма ΔΣ-модуляции. Как показано на фиг.1, алгоритм ΔΣ-модуляции байпасного типа сначала делит контрольный входной сигнал Rsld от контроллера на три составляющие, как в уравнении (1) (см. "А" на фиг.1).

В уравнении (1) Uliftin_cent(k) представляет собой составляющую с центральным значением в диапазоне пульсаций контрольного входного сигнала, a Duliftin_L(k) является составляющей с малыми пульсациями по отношению к составляющей Uliftin_cent(k) с центральным значением, находящимися в пределах определенного диапазона. Duliftin_H(k) представляет собой составляющую с большими пульсациями по отношению к Uliftin_cent(k), выходящими за пределы определенного диапазона.
Только составляющая Duliftin_L(k) с малыми пульсациями подвергается модуляции с помощью алгоритма ΔΣ-модуляции для получения модулированной составляющей Duliftin_L_dsm(k) (см. "В" на фиг.1). После этого модулированная составляющая Duliftin_L_dsm(k) и другие составляющие подвергаются повторному объединению, как показано в уравнении (2), для получения входного сигнала управления Uliftin(k) (см. "С" на фиг.1).

В результате во всей области значений контрольного входного сигнала Rsld в качестве входного сигнала управления генерируется ΔΣ-модулированный сигнал с малой амплитудой. Согласно этой технологии сначала в неизменном виде из управляющего сигнала сохраняется составляющая с большими пульсациями и только составляющая сигнала, имеющая амплитуду в пределах определенного диапазона, подвергается ΔΣ-модуляции. Поэтому эта технология имеет возможность компенсировать нелинейность характеристики, являющейся особенностью алгоритма ΔΣ-модуляции, и позволяет генерировать управляющий сигнал с подавленными колебаниями.
Далее приводится описание способов вычисления вышеуказанных трех составляющих, полученных в результате деления.
1.2 Вычисление составляющей Uliftin_cent с центральным значением
Составляющая Uliftin_cent с центральным значением в контрольном входном сигнале Rsld от контроллера не должна следовать за импульсовидными участками и/или участками с малой амплитудой пульсаций контрольного входного сигнала (условие 1), но должна следовать за большими пульсациями контрольного входного сигнала, например ступенчатой формы (условие 2). Условие 1 требуется для повышения возможности конвергенции управления, а условие 2 - для повышения возможности слежения в процессе управления.
Так как условие 1 и условие 2 противоречат одно другому, оба условия не могут быть удовлетворены одновременно в результате использования обычных линейных фильтров. При удалении высокочастотных составляющих, например импульсовидной формы и/или с малыми колебаниями, в результате использования обычного линейного фильтра (условие 1) вместе с ними могут быть сглажены и ступенчатые или т.п. участки. С другой стороны, при сохранении больших пульсаций, например ступенчатой или т.п. формы (условие 2), высокочастотные составляющие могут быть удалены только частично.
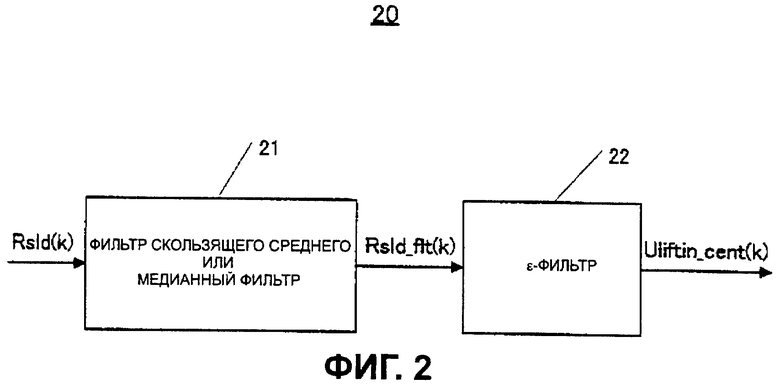
Поэтому в одном варианте осуществления настоящего изобретения для выделения целевой составляющей Uliftin_cent с центральным значением используется нелинейный фильтр, являющийся комбинацией многочисленных фильтров. На фиг.2 представлена блок-схема нелинейного фильтра 20, используемого в одном варианте осуществления настоящего изобретения. В этом варианте осуществления в нелинейном фильтре 20 используется фильтр 21, выбранный из группы, состоящей из фильтра скользящего среднего и медианного фильтра, в комбинации с ε-фильтром 22.
Фильтр скользящего среднего является фильтром для вычисления среднего определенного числа данных, позволяющего сглаживать высокочастотные составляющие, например импульсовидной формы волны и/или с малыми колебаниями. Как показано на фиг.2, этот фильтр вычисляет среднее Rsld_flt(k) путем использования m+1 данных, начиная от входного сигнала Rsld(k) в текущий момент времени до входного сигнала Rsld(k-m) через m шагов. Формула фильтра скользящего среднего, как правило, выражается уравнением (3).

Фильтр скользящего среднего - типичный линейный фильтр. В другом варианте изобретения может быть использован любой другой линейный фильтр типа фильтра нижних частот.
Медианный фильтр является фильтром для выбора центрального значения из определенного числа данных. Медианный фильтр - один тип нелинейного фильтра для сглаживания высокочастотных составляющих, например импульсовидной формы и/или с малыми колебаниями. В случае, когда медианный фильтр выполняет процесс сглаживания сигналов ступенчатой и т.п. формы, то это вызывает меньшую деформацию по сравнению с линейными фильтрами. Формула медианного фильтра, как правило, выражается уравнением (4).

В уравнении (4) Fmed представляет собой функцию для выделения центрального значения из (2m'+1) входных данных. (2m'+1) - нечетное число. В этом случае центральное значение является m'-м. В случае, когда (2m'+1) - четное число, в качестве центрального значения может быть выбрано или m'-e значение, или (m'+1)-е значение, или их среднее.
ε-фильтр - нелинейный фильтр, особенностью которого является то, что в переходном состоянии выходной сигнал представляет собой входной сигнал в неизменном виде, а в установившемся состоянии выходной сигнал представляет собой скользящее среднее, ε-фильтр в основном вычисляет скользящее среднее значение путем использования n+1 данных, начиная от входного сигнала Rsld_flt(k) в текущий момент времени до входного сигнала Rsld_flt(k-n) через n шагов. Однако данные, которые выходят за пределы определенного порогового значения ε по отношению к входному сигналу Rsld_flt(k) в текущий момент времени, заменяются на Rsld_flt(k). Другими словами, ε-фильтр является фильтром скользящего среднего с эффектом нелинейной функции Fε. Формула ε-фильтра, как правило, выражается уравнением (5).

Нелинейная функция Fε определяется уравнением (6).

Использование такого ε-фильтра позволяет уменьшить флуктуации в установившемся состоянии и подавить запаздывания по фазе в переходном состоянии.
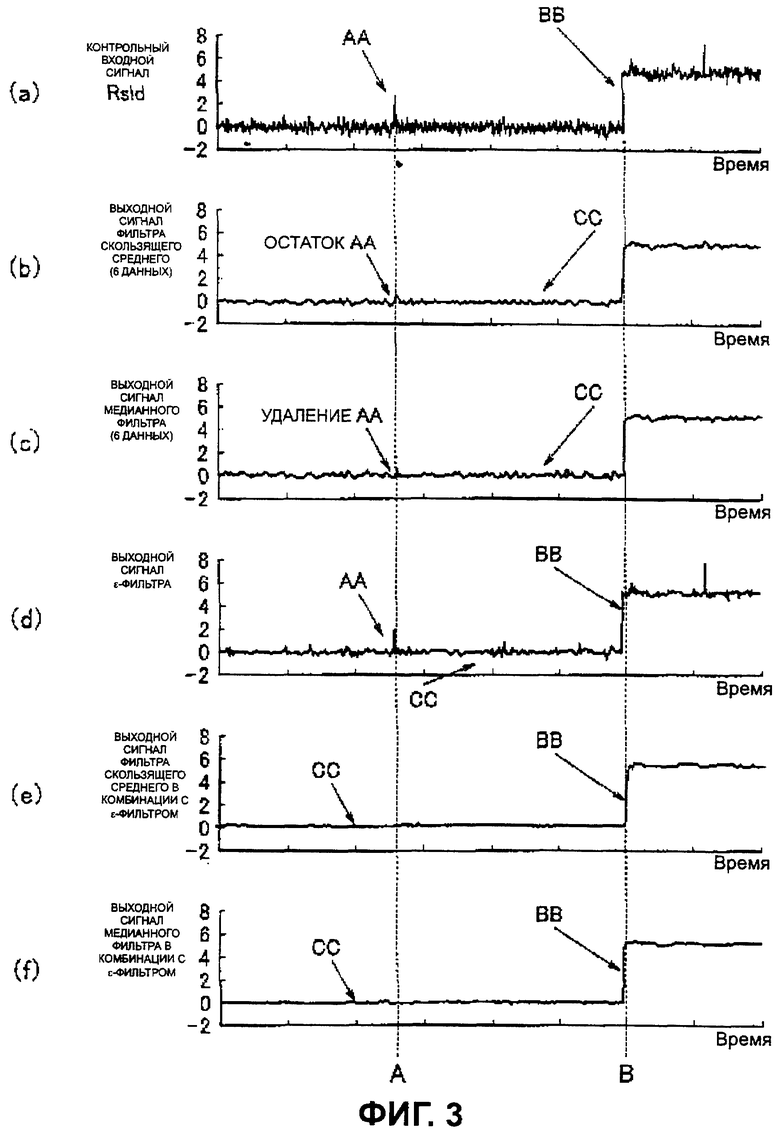
На фиг.3 представлены сравнительные характеристики фильтров при выделении составляющей с центральным значением из контрольного входного сигнала. На фиг.3(а) - контрольный входной сигнал Rsld от контроллера. На фиг.3(b)-(d) - выходной сигнал описанных выше трех типов фильтров (скользящего среднего, медианного и ε-). В каждом случае используется только один тип фильтра. На фиг.3(е) представлен выходной сигнал нелинейного фильтра 20, представляющего собой комбинацию фильтра скользящего среднего и ε-фильтра. На фиг.3(f) - выходной сигнал другого нелинейного фильтра 20, являющегося комбинацией медианного фильтра и ε-фильтра.
На фиг.3 число данных, используемых в фильтре скользящего среднего и медианном фильтре, составляет шесть. В ε-фильтре также используются 6 данных.
Результат каждого процесса фильтрации является следующим. Основное внимание в следующем ниже описании уделяется импульсовидному участку (А-А на фиг.3) и ступенчатому участку (ВВ на фиг.3). Оба участка включены в контрольный входной сигнал Rsld.
В случае выполнения процесса фильтрации с использованием фильтра скользящего среднего (фиг.3(b)) импульсовидный участок контрольного входного сигнала Rsld подавляется, хотя и не полностью (остаток А-А на фиг.3(b)), и сохраняется ступенчатый участок. Однако определенное влияние пульсаций с малой амплитудой (СС на фиг.3(b)) остается. Для уменьшения такого влияния требуется увеличение числа данных, используемых в процессе вычисления скользящего среднего. При этом с увеличением числа данных возможность слежения по отношению к ступенчатому участку может ухудшиться.
В случае выполнения процесса фильтрации с использованием медианного фильтра (фиг.3(с)), импульсовидный участок контрольного входного сигнала Rsld удаляется и в достаточной степени обеспечивается слежение по отношению к ступенчатому участку. Однако возможность подавления влияния пульсаций с малой амплитудой является низкой (С-С на фиг.3(с)). Для улучшения возможности медианного фильтра по подавлению влияния пульсаций с малой амплитудой требуется увеличение числа данных, используемых в процессе вычисления медианного значения (центрального значения). При этом с увеличением числа данных возможность слежения по отношению к ступенчатому участку может ухудшиться.
В случае использования ε-фильтра (фиг.3(d)) возможность слежения по отношению к ступенчатому участку является очень высокой, и никакого запаздывания не наблюдается (В-В на фиг.3(d)). Однако возможность подавления влияния пульсаций с малой амплитудой и/или импульсовидного участка очень низка (А-А на фиг.3(d)).
В случае использования нелинейного фильтра 20 (фильтр скользящего среднего значения + ε-фильтр) (см. (е) на фиг.3) импульсовидный участок подавляется фильтром скользящего среднего, ε-фильтрация осуществляется применительно к фильтрованным значениям в более широком временном интервале, чем временной интервал данных, используемых в фильтре скользящего среднего. В результате обеспечивается сильное ослабление импульсовидного участка и пульсаций с малой амплитудой при одновременном сохранении высокой возможности слежения по отношению к ступенчатому участку.
В случае использования нелинейного фильтра 20 (медианный фильтр + ε-фильтр) (фиг.3(f)) импульсовидный участок подавляется медианным фильтром, ε-фильтрация осуществляется применительно к фильтрованным значениям в более широком временном интервале, чем временной интервал данных, используемых в медианном фильтре. В результате обеспечивается сильное ослабление импульсовидного участка и/или пульсаций с малой амплитудой (С-С на фиг.3(f)) при одновременном сохранении высокой возможности слежения по отношению к ступенчатому участку (В-В на фиг.3(f)).
Сравнение нелинейных фильтров (е) и (f) показывает, что (f) превосходит по возможности слежения по отношению к ступенчатому участку, а (е) превосходит по возможности ослабления импульсовидного участка и/или пульсаций с малой амплитудой.
Из этого следует, комбинация фильтров в этом варианте осуществления изобретения позволяет эффективно использовать преимущества каждого из фильтров при одновременной компенсации недостатков каждого фильтра.
1.3 Вычисление составляющей Duliftin_L с малыми пульсациями и составляющей Dliftin_H с большими пульсациями
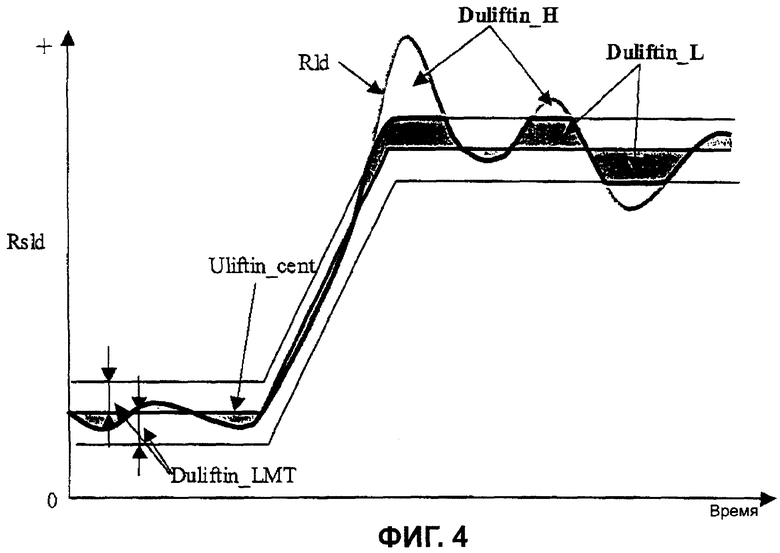
На фиг.4 представлено соотношение между составляющей Duliftin_L с малыми пульсациями и составляющей Dliftin_H с большими пульсациями по отношению к контрольному входному сигналу. Сначала вычисляется составляющая Uliftin_cent с центральным значением в составе контрольного входного сигнала и находится разность Dliftin между составляющей с центральным значением и контрольным входным сигналом. Затем из разности Dliftin в качестве составляющей Duliftin_L с малыми пульсациями извлекается составляющая входного сигнала в пределах определенного порогового значения Duliftin_LMT деления. Составляющая сигнала, превышающая определенное пороговое значение деления, выделяется в качестве составляющей Dliftin_H с большими пульсациями.
В этом варианте осуществления составляющая Duliftin_L с малыми пульсациями и составляющая Dliftm_H с большими пульсациями вычисляются по уравнениям (7)-(9).



1.4 Вычисление ΔΣ-модулированной составляющей Duliftin_L_DSM с малыми пульсациями
Далее составляющая Duliftin_L с малыми пульсациями из составляющих, полученных в результате деления, подвергается модуляции с помощью алгоритма ΔΣ модуляции и вычисляется ΔΣ-модулированная составляющая Duliftin_L_DSM с малыми пульсациями. В подробностях вычисление ΔΣ-модулированной составляющей с малыми пульсациями рассматривается ниже.
Как показано в уравнении (10), составляющая Duliftin_L с малыми пульсациями используется в качестве входной величины r(k) при ΔΣ-модуляции без предварительной обработки. При ΔΣ-модуляции обычно выполняется предварительная обработка типа ограничения или смещения. Так как извлечение составляющей Duliftin_L с малыми пульсациями осуществлялось в пределах порогового значения (±Duliftin_LMT) деления, то фактически эта составляющая была подвергнута предварительной обработке.

Затем, как показано в уравнении (11), вычисляется отклонение δ(k) между входным значением r(k) и модулированным сигналом u(k-1) в предыдущий момент времени k-1. Далее, как показано в уравнении (12), сигнал отклонения δ(k) суммируется с интегральной величиной отклонения σ(k-l) в предыдущий момент времени k-1, чтобы получить интегральную величину отклонения σ(k).


Затем, как показано в уравнении (13), к интегральной величине отклонения σ(k) применяется нелинейная функция fnl, чтобы получить двоичное значение +R или -R. В частности, если интегральное значение отклонения σ(k) равно или больше нуля, в результате применения нелинейной функции fnl получается модулированный сигнал u(k) со значением +R, а если интегральное значение отклонения σ(k) меньше нуля, результатом применения нелинейной функции является модулированный сигнал со значением -R. При этом R представляет собой определенное значение, которое превышает максимальное абсолютное значение входной величины r. Кроме того, в случае, когда интегральное значение отклонения σ(k) равно нулю, результатом применения нелинейной функции fnl может быть модулированный сигнал со значением 0. Затем, как показано в уравнении (14), модулированный сигнал u(k) выводится в качестве модулированной составляющей Duliftin_L_DSM с малыми пульсациями.


1.5 Система управления механизмом с переменным подъемом
На фиг.5 представлена блок-схема системы 50 управления механизмом с переменным подъемом, которая включает в свой состав ΔΣ-модулятор 52 байпасного типа.
Сначала целевая величина подъема и измеренное значение liftin подаются на вход контроллера 51. Это измеренное значение представляет собой максимальную величину подъема, измеренную обычным способом с использованием датчика 55, установленного в механизме 56 с переменным подъемом. Контроллер вычисляет контрольный входной сигнал Rsld, который является величиной коррекции, используемой для устранения ошибки. Затем контрольный входной сигнал Rsld подается на вход ΔΣ-модулятора 52 байпасного типа, в котором с помощью нелинейного фильтра 20 выделяется составляющая Uliftin_cent с центральным значением.
После этого разность между контрольным входным сигналом Rsld и составляющей Uliftin_cent с центральным значением подвергается делению на составляющую Dliftin_L с малыми пульсациями и составляющую Dliftin_H с большими пульсациями с использованием порогового значения. Затем составляющая Dliftin_L с малыми пульсациями подвергается вычислительной обработке с помощью алгоритма 54 ΔΣ-модуляции и вычисляется ΔΣ-модулированная составляющая Dliftin_L_dsm с малыми пульсациями. В заключение ΔΣ-модулированная составляющая с малыми пульсациями объединяется с составляющей с центральным значением и составляющей с большими пульсациями и генерируется входной сигнал Uliftin управления.
Следует отметить, что несмотря на то, что в описанной выше системе используется алгоритм 54 ΔΣ-модуляции, модулятор может быть построен и с использованием алгоритма 64 Δ-модуляции или алгоритма 74 ΔΣ-модуляции.
На фиг.6 представлена блок-схема системы управления механизмом 60 с переменным подъемом, в которой применяется алгоритм 64 Δ-модуляции. Операции, выполняемые алгоритмом 64 Δ-модуляции, представлены в уравнениях (15)-(19).





На фиг.7 представлена блок-схема системы управления 70 механизмом с переменным подъемом, в котором применяется алгоритм 74 ΣΔ-модуляции. Операции, выполняемые алгоритмом 74 ΣΔ-модуляции, представлены в уравнениях (20)-(24).





2. Использование применительно к другим объектам управления
В традиционных алгоритмах модуляции типа ΔΣ-модуляции, несмотря на их высокую компенсирующую способность по отношению к нелинейности, имеется проблема, связанная с возможностью генерации колебаний в объектах управления, имеющих большие пульсации в регулируемых переменных. Рассматриваемый в настоящем изобретении алгоритм модуляции байпасного типа может быть использован применительно даже к таким объектам управления. В других вариантах осуществления настоящего изобретения алгоритм модуляции байпасного типа используется и применительно к объектам управления, отличным от механизма с переменным подъемом, которые имели проблемы с традиционными алгоритмами модуляции.
На фиг.8 представлена блок-схема системы 80 управления, в которой ΔΣ-модулятор 52 применяется в механизме 86 с переменными фазами. Механизм 86 с переменными фазами регулирует моменты открытия и закрытия клапана путем изменения фазы Cain кулачка с использованием тормоза с гидравлическим приводом, электромагнитного тормоза и т.д. В этой системе 80 регулируемость фазы Cain повышается по сравнению с традиционными модуляторами вследствие обеспечения возможности компенсации гистерезисной характеристики гидравлического соленоида и/или электромагнитного тормоза, а также низкой разрешающей способности системы управления с помощью входного модулированного сигнала при одновременном уменьшении диапазона модуляции.
На фиг.9 представлена блок-схема системы 90 управления, в которой ΔΣ-модулятор 52 байпасного типа применяется при регулировании соотношения воздух/топливо. Система управления устройством регулирования соотношения воздух/топливо доводит выходной сигнал Vex датчика 95 отработавших газов, установленного в системе выпуска отработавших газов, до целевого значения Vex_cmd путем регулировки параметра Ufuel топлива (например, величины коррекции подачи топлива). В этом случае обеспечивается возможность компенсации запаздывания реакции и/или определенного разброса характеристик двигателя 96 и/или каталитического нейтрализатора отработавших газов, а также возможность точного регулирования выходного сигнала Vex датчика отработавших газов и доведения его до целевого значения, позволяющего снизить содержание вредных компонентов в отработавших газах. Кроме того, уменьшение диапазона изменений параметра топлива (являющегося входным сигналом управления) позволяет уменьшить пульсации параметров процесса сгорания в двигателе 96 и обеспечить снижение количества несгоревших НС (углеводородов).
На фиг.10 представлена блок-схема системы 100, в которой ΔΣ-модулятор 52 байпасного типа применяется при управлении исполнительным механизмом для автоматической трансмиссии. Управление исполнительным механизмом для автоматической трансмиссии включает в себя управление сцеплением для АМТ (для автоматической трансмиссии с ручным переключением) и/или управление гидравлическим приводом для переключения, регулирование положения исполнительного механизма с электрическим приводом, управление включением и выключением сцепления или регулирование скорости скольжения гидравлической многодисковой муфты AT (автоматической трансмиссии), регулирование бокового давления для CVT (для бесступенчато регулируемой трансмиссии) типа ременной и т.д. При этом достижение высокой управляемости затруднено вследствие трения и/или гистерезисной характеристики автоматической трансмиссии 106 и/или исполнительного механизма. Однако использование ΔΣ-модулятора 52 байпасного типа, как показано на фиг.10, обеспечивает возможность реализации высокой управляемости и повышение эффективности расхода топлива (пробега в милях на единицу расхода топлива) вследствие уменьшения удара при переключении передачи и повышения коэффициента полезного действия передачи.
В системах, представленных на фиг.8-10, в качестве модулятора используется ΔΣ-модулятор 52 байпасного типа, однако это не исключает возможности использования Δ-модулятора 62 байпасного типа или ΣΔ-модулятора 72 байпасного типа в другом варианте изобретения. Описание изобретения велось на конкретных примерах осуществления. Приведенное описание не предполагает ограничения изобретения такими вариантами осуществления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2012 |
|
RU2509337C1 |
| Приёмо-передающее устройство гомодинного радиолокатора | 2021 |
|
RU2787976C1 |
| Способ управления фильтрокомпенсирующим устройством при нестационарных нелинейных нагрузках и устройство для его осуществления | 2021 |
|
RU2776423C1 |
| УСТРОЙСТВО И СПОСОБ ЛИНЕАРИЗАЦИИ УСИЛИТЕЛЯ МОЩНОСТИ В СИСТЕМЕ ПОДВИЖНОЙ РАДИОСВЯЗИ | 1999 |
|
RU2172552C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРАЛЛЕЛЬНОЙ РАБОТОЙ ЧЕТЫРЕХКВАДРАНТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2005 |
|
RU2305361C2 |
| ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ И СТАБИЛИЗАТОР НАПРЯЖЕНИЯ ИСТОЧНИКА БЕСПЕРЕБОЙНОГО ПИТАНИЯ | 2009 |
|
RU2498487C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ИНВЕРТОРОМ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1999 |
|
RU2159002C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ВЫЧИСЛЕНИЕМ ФАЗ КОММУТАЦИИ И МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2006 |
|
RU2327276C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ | 2002 |
|
RU2238583C2 |
| СПОСОБ УПРАВЛЕНИЯ КОНДИЦИОНЕРОМ ЭЛЕКТРОСЕТИ | 2009 |
|
RU2408122C1 |
Изобретение относится к области автоматики и может быть использовано в силовых установках для управления механизмами с переменным подъемом, переменными фазами и в регуляторах соотношения воздух/топливо. Техническим результатом является обеспечение достаточной степени компенсации нелинейности характеристики силовой установки, удовлетворение требованиям по обеспечению возможности слежения и стабильности силовой установки с большими пульсациями регулируемых переменных. В способе управления силовой установкой и устройстве для ее управления использован алгоритм модуляции. Устройство управления содержит средство для вычисления предварительного сигнала управления для доведения выходного сигнала силовой установки до целевого значения; средство для деления предварительного входного сигнала управления на множество составляющих; средство модуляции, предназначенное для модуляции, по меньшей мере, одной из множества составляющих; средство для суммирования модулированной составляющей с другими составляющими для генерации входного сигнала управления. Это обеспечивает минимизацию пульсаций входного сигнала, вызываемых модуляцией, сохранение возможности компенсации нелинейности характеристики силовой установки типа трения и гистерезиса, обусловленных традиционным алгоритмом модуляции, предотвращение колебания выходного сигнала даже в силовой установке с большими изменениями предварительного входного сигнала управления и, следовательно, повышение управляемости. 6 н. и 6 з.п. ф-лы, 10 ил.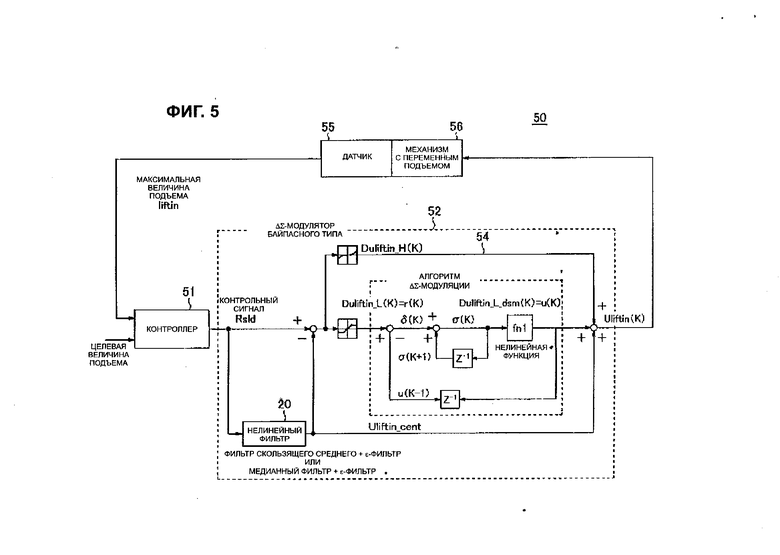
1. Контроллер силовой установки, использующий алгоритм модуляции и содержащий: средство для вычисления предварительного сигнала управления, используемого для доведения выходного сигнала силовой установки до целевого значения; средство для деления предварительного входного сигнала управления на множество составляющих; средство модуляции, предназначенное для модуляции, по меньшей мере, одной из множества составляющих; и средство для суммирования модулированной составляющей с другими составляющими с целью генерации входного сигнала управления.
2. Контроллер силовой установки по п.1, отличающийся тем, что указанное множество составляющих включает в себя: первую составляющую, выделяемую путем фильтрации предварительного входного сигнала управления; и вторую составляющую, выделяемую из разности между предварительным входным сигналом управления и первой составляющей, где указанная вторая составляющая находится в пределах определенного диапазона абсолютных значений; причем указанное средство модуляции модулирует вторую составляющую.
3. Контроллер силовой установки по п.1, отличающийся тем, что указанное средство модуляции использует алгоритм, выбранный из группы, состоящей из алгоритма ΔΣ-модуляции, алгоритма ΣΔ-модуляции и алгоритма Δ-модуляции.
4. Контроллер силовой установки по п.2, отличающийся тем, что указанная фильтрация выполняется линейным фильтром или медианным фильтром.
5. Контроллер силовой установки по п.4, отличающийся тем, что указанная фильтрация дополнительно выполняется ε-фильтром.
6. Контроллер силовой установки по п.2, отличающийся тем, что указанная фильтрация выполняется ε-фильтром.
7. Контроллер для механизма с переменным подъемом в двигателе внутреннего сгорания, использующий алгоритм модуляции и содержащий: средство для вычисления предварительного сигнала управления, используемого для доведения максимальной величины подъема в механизме с переменным подъемом до целевого значения; средство для деления предварительного входного сигнала управления на множество составляющих; средство модуляции, предназначенное для модуляции, по меньшей мере, одной из множества составляющих; и средство для суммирования модулированной составляющей с другими составляющими с целью генерации входного сигнала управления.
8. Контроллер для механизма с переменными фазами в двигателе внутреннего сгорания, использующий алгоритм модуляции и содержащий: средство для вычисления предварительного сигнала управления, используемого для доведения фазы кулачка в механизме с переменным подъемом до целевой фазы; средство для деления предварительного входного сигнала управления на множество составляющих; средство модуляции, предназначенное для модуляции, по меньшей мере, одной из множества составляющих; и средство для суммирования модулированной составляющей с другими составляющими с целью генерации входного сигнала управления.
9. Контроллер соотношения воздух/топливо в двигателе внутреннего сгорания, использующий алгоритм модуляции и содержащий: средство для вычисления предварительного сигнала управления, используемого для доведения выходного сигнала датчика отработавших газов до целевого значения; средство для деления предварительного входного сигнала управления на множество составляющих; средство модуляции, предназначенное для модуляции, по меньшей мере, одной из множества составляющих; и средство для суммирования модулированной составляющей с другими составляющими с целью генерации входного сигнала управления.
10. Контроллер для автоматической трансмиссии в двигателе внутреннего сгорания, использующий алгоритм модуляции и содержащий: средство для вычисления предварительного сигнала управления, используемого для доведения выходного положения автоматической трансмиссии до целевого положения; средство для деления предварительного входного сигнала управления на множество составляющих; средство модуляции, предназначенное для модуляции, по меньшей мере, одной из множества составляющих; и средство для суммирования модулированной составляющей с другими составляющими с целью генерации входного сигнала управления.
11. Способ управления силовой установкой, содержащий этапы: вычисления предварительного входного сигнала управления, используемого для доведения выходного сигнала силовой установки до целевого значения; деления предварительного входного сигнала управления на множество составляющих; модуляции, по меньшей мере, одной из множества составляющих; и суммирования модулированной составляющей с другими составляющими с целью генерации входного сигнала управления.
12. Способ по п.11, отличающийся тем, что указанная силовая установка представляет собой двигатель внутреннего сгорания.
| АДАПТИВНАЯ НЕЛИНЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1990 |
|
RU2027212C1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ЭЛЕКТРОМАГНИТНОГО КЛАПАНА, ПРЕДНАЗНАЧЕННОГО ДЛЯ ДОЗИРОВАНИЯ ГАЗОВОГО ТОПЛИВА В ЦИЛИНДРЫ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2002 |
|
RU2213249C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТОПЛИВОПОДАЧЕЙ С ПОМОЩЬЮ ЭЛЕКТРОМАГНИТНЫХ КЛАПАНОВ | 1999 |
|
RU2191912C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ УСИЛИЕМ ПЕРЕКЛЮЧЕНИЯ СКОРОСТЕЙ В АВТОМАТИЗИРОВАННОЙ МЕХАНИЧЕСКОЙ ТРАНСМИССИИ | 1994 |
|
RU2101199C1 |
| Самонастраивающаяся система управления | 1972 |
|
SU454534A1 |
| US 2003023328 A1, 30.01.2003 | |||
| JP 2003195908 A, 11.07.2003 | |||
| JP 2003241803 A, 29.08.2003 | |||
| Сечка для измельчения пищевых и кормовых материалов | 1985 |
|
SU1279820A1 |

