Изобретение относится к радиотехнике, точнее к радиолокации, и может быть использовано при разработке систем радиозондирования атмосферы (CP), построенных на основе применения радиолокационного метода и использования сигналов спутниковых навигационных радиоэлектронных систем (СНРС) ГЛОНАСС/GPS для определения пространственных координат аэрологических радиозондов (АРЗ), передачи координатной и телеметрической информации на наземную базовую станцию (БС), а также определения направления и скорости ветра радиолокационным методом без запуска АРЗ.
Общей проблемой производства и эксплуатации CP атмосферы является создание высокоточных систем определения координат АРЗ запускаемых в свободную атмосферу с помощью наполненных легким газом шаров-пилотов и оперативное определение вертикального профиля метеорологических параметров атмосферы без запуска АРЗ.
Известна система GPS-слежения (патент США №5379224). Недорогая система слежения, использующая спутники глобальной системы позиционирования (GPS), пригодна для применения в прикладных задачах, в которых задействованы радиозонды, радиогидроакустические буйки и другие подвижные объекты. Система слежения включает в себя датчик, установленный на каждом объекте, который в оцифровывает сигналы GPS-спутников, и записывает их в буфер данных. Затем эти цифровые выборки передаются, с меньшей скоростью, чем эти сигналы GPS-спутников были оцифрованы, по телеметрическому каналу связи, чередуясь с другими телеметрическими данными объекта. Эти данные GPS обрабатываются вычислительной рабочей станцией, которая вычисляет координаты и скорость датчика на момент выборки (оцифровки) сигнала. Буфер данных датчика периодически обновляется, а на рабочей станции периодически пересчитываются координаты и скорость датчика. Кроме этого рабочая станция вычисляет дифференциальные поправки, чтобы помочь обнаружить сигналы и повысить точности определения координат.
Недостатки известного решения: большая загруженность радиоканала телеметрии, поэтому более широкий спектр передаваемого сигнала (потери в дальности или увеличение мощности передатчика); прерывистость обработки сигналов GPS, что усложняет функционирование следящих контуров и фильтров.
Известна «Комплексная система радиозондирования атмосферы», патент РФ на полезную модель №127944. Комплексная CP работает на основе сигналов спутниковых навигационных радиоэлектронных систем ГЛОНАСС, GPS, GALILEO. Аэрологический радиозонд содержит навигационный приемник сигналов ГЛОНАСС, GPS, GALILEO. Наземная базовая станция системы радиозондирования принимает сигналы навигационного радиозонда в диапазоне 1670-1690 МГц на антенну, обладающей высокими направленными свойствами.
Недостатком полезной модели является работа только в одном диапазоне 1670-1690 МГц и невозможность использования второго разрешенного диапазона 403 МГц. Другим недостатком следует считать возможные срывы автосопровождения радиозонда по угловым координатам из-за узкой диаграммы направленности РЛС при запуске радиозонда и в ближней зоне. Также недостатком является невозможность определения вертикального профиля скорости и направления ветра без применения АРЗ.
Известна «Многофункциональная система радиозондирования атмосферы», патент РФ №2626410 от 25.07.2016.
Эта система может работать в стандартном радиолокационном режиме измерения координат АРЗ снабженным сверхрегенеративным приемопередатчиком в диапазоне 1670-1690 МГц, в радиопеленгационном режиме измерения координат АРЗ снабженным датчиком давления и в радионавигационном режиме измерения координат АРЗ снабженным приемником сигналов ГЛОНАСС/GPS и передатчиком, работающим в диапазонах 401-406 МГц или 1670-1690 МГц. Эта CP выбрана в качестве ПРОТОТИПА.
Недостатком известных CP и ПРОТОТИПА является значительный интервал времени (более полутора-двух часов) необходимый для получения данных в процессе подъема АРЗ для определения метеорологических параметрах атмосферы до высоты 25-35 км и невозможность определения вертикального профиля скорости и направления ветра без применения АРЗ.
Технической задачей изобретения является расширение функциональных возможностей CP атмосферы за счет применения РЛС для определения вертикального профиля скорости и направления ветра без применения АРЗ.
Технический результат достигается за счет развития структуры построения CP, а именно, за счет введения режима непосредственного радиолокационного зондирования метеорологических параметров атмосферы для получения оперативной информации о параметрах вертикального профиля ветра - направлении и скорости без запуска АРЗ в атмосферу, обеспечения работы CP в стандартных радиолокационном, радиопеленгационном и радионавигационном режимах определения текущих координат АРЗ.
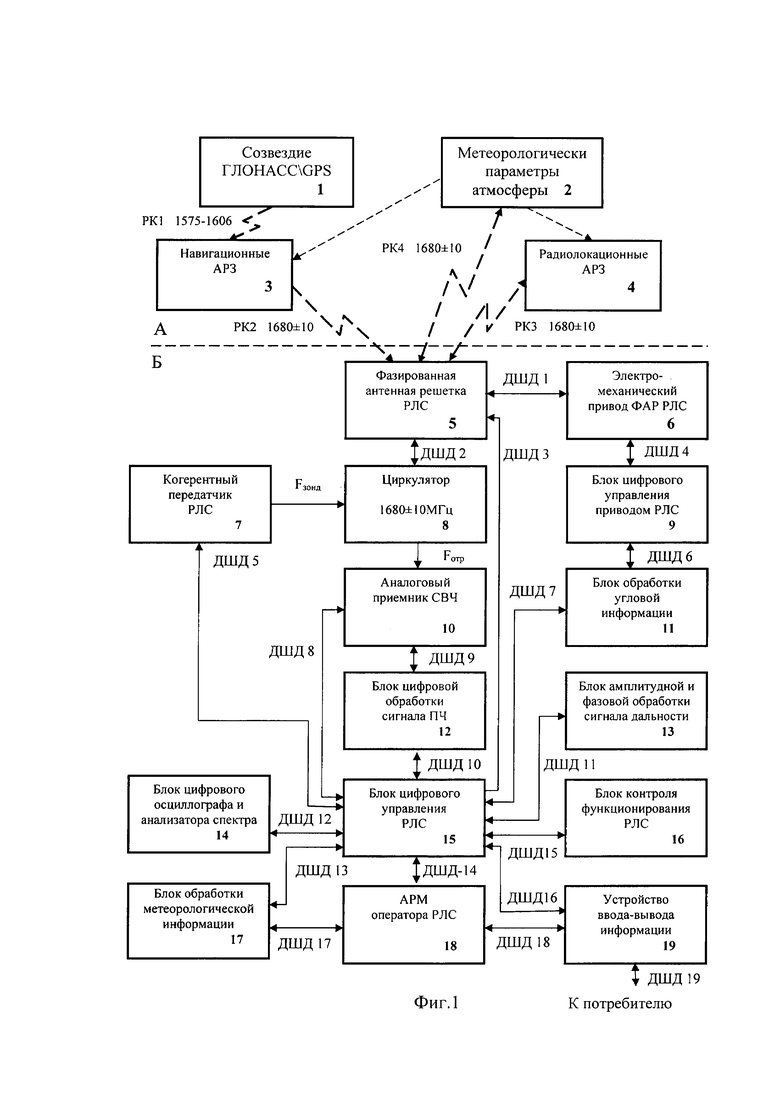
Для решения этой задачи предлагается многорежимный аэрологический комплекс, состоящий из двух основных частей: пространственной (А) и наземной (Б), причем пространственная часть содержит созвездия СНРС ГЛОНАСС/GPS, метеорологические параметры атмосферы, навигационные и радиолокационные АРЗ, а наземная часть состоит из многорежимной РЛС, которая содержит следующие блоки: фазированная антенная решетка (ФАР) с электромеханическим приводом (ЭМП), когерентный передатчик, циркулятор, блок цифрового управления приводом (БЦУП), аналоговый приемник СВЧ, блок обработки угловой информации (БОУИ), блок цифровой обработки сигналов ПЧ (БЦОС), блок амплитудной и фазовой обработки сигнала дальности (БАФОС), блок цифрового осциллографа и анализатора спектра (БЦОАС), блок цифрового управления (БЦУ) РЛС, блок контроля функционирования (БКФ) РЛС, блок обработки метеорологической информации (БОМИ), АРМ оператора РЛС и блок ввода-вывода информации (БВВИ), причем обе части имеют следующие соединения: созвездия СНРС ГЛОНАСС/GPS связаны первым радиоканалом РК 1 с навигационными АРЗ, которые вторым радиоканалом РК 2 связаны с ФАР, радиолокационные АРЗ третьим радиоканалом РК 3 связаны с ФАР, метеорологические параметры атмосферы четвертым радиоканалом РК 4 также связаны с ФАР; ФАР второй ДШД связана с входом/выходом циркулятора, а первой ДШД - с ЭМП ФАР; выход когерентного передатчика fзонд связан с входом циркулятора, выход которого fпp соединен с входом аналогового приемника, который в свою очередь восьмой ДШД соединен непосредственно с блоком цифрового управления (БЦУ) РЛС, а девятой ДШД через блок цифровой обработки сигналов ПЧ десятой ДШД также соединен с этим блоком, также с ним двенадцатой и тринадцатой ДШД соединены блоки БЦОС и БОМИ непосредственно, БОМИ семнадцатой ДШД соединен с АРМ, который четырнадцатой ДШД соединен с БЦУ РЛС, однонаправленная шина с его выхода соединена с ФАР; БЦУ РЛС седьмой ДШД соединен с блоком обработки угловой информации (БОУИ), одинадцатой ДШД - с блоком амплитудной и фазовой обработки сигнала дальности (БАФОС), пятнадцатой ДШД - с БКФ, шестнадцатой ДШД - с блоком ввода-вывода информации (БВВИ), также с которым восемнадцатой ДШД соединен АРМ; ЭМП ФАР четвертой ДШД соединен с блоком цифрового управления приводом (БЦУП) РЛС, который шестой ДШД соединен с блоком обработки угловой информации (БОУИ); блок ввода-вывода информации (БВВИ) девятнадцатой ДШД связан с потребителем этой информации и является выходом комплекса.
На фиг. 1 показана структурная схема комплекса, на которой изображено: (1) - созвездие спутниковых навигационных радиоэлектронных систем (СНРС) ГЛОНАСС/GPS соответственно, (2) - метеорологические параметры атмосферы, (3) - навигационные АРЗ, (4) - радиолокационные АРЗ, (5) - фазированная антенная решетка (ФАР) РЛС, (6) - электромеханический привод ФАР, (7) - когерентный передатчик РЛС, (8) - циркулятор, (9) - блок цифрового управления приводом антенны РЛС, (10) - аналоговый приемник СВЧ, (11) - блок обработки угловой информации, (12) - блок цифровой обработки сигнала промежуточной частоты (БЦОС), (13) - блок амплитудной и фазовой обработки сигнала дальности (БАФОС), (14) - блок цифрового осциллографа и анализатора спектра (БЦОАС), (15) - блок цифрового управления РЛС (БЦУ), (16) - блок контроля функционирования (БКФ) РЛС, (17) - блок обработки метеорологической информации (БОМИ), (18) - автоматизированное рабочее место оператора (АРМ) РЛС, (19) - устройство ввода-вывода информации (УВВИ), РК 1 - первый радиоканал (рабочий диапазон частот 1575-1606 МГц), РК 2, РК 3, РК 4 - второй, третий и четвертый радиоканалы (рабочий диапазон частот 1680±10 МГц).
Схема на фиг. 1 имеет следующие соединения: созвездия СНРС ГЛОНАСС/GPS 1 первым радиоканалом РК 1 связаны с навигационными АРЗ 3, которые вторым радиоканалом связаны с ФАР 5, радиолокационные АРЗ 4 третьим радиоканалом РК 3 связаны с ФАР 5, метеорологические параметры атмосферы четвертым радиоканалом РК 4 также связаны с ФАР 5, которая второй ДШД связана с входом/выходом циркулятора 8, а первым ДШД - с ЭМП ФАР 6; выход fзонд когерентного передатчика 7 связан с входом циркулятора 8, выход которого fпp соединен с входом аналогового приемника 10, который в свою очередь восьмой ДШД соединен непосредственно с блоком цифрового управления (БЦУ) РЛС 15, а девятой ДШД через блок цифровой обработки сигналов ПЧ (БЦОС) 12 десятой ДШД также соединен с этим блоком, также с ним двенадцатой и тринадцатой ДШД соединены блок цифрового осциллографа и анализатора спектра (БЦОАС) 14 и БОМИ 17 непосредственно, БОМИ 17 семнадцатой ДШД соединен с АРМ 18, который четырнадцатой ДШД соединен с БЦУ РЛС 15, однонаправленная шина с его выхода соединена с ФАР 5; БЦУ РЛС 15 седьмой ДШД соединен с блоком обработки угловой информации (БОУИ) 11, одинадцатой ДШД - с БАФОС 13, пятнадцатой ДШД - с БКФ 16, шестнадцатой ДШД - с блоком ввода-вывода информации (БВВИ) 19, также с которым восемнадцатой ДШД соединен АРМ 18; ЭМП ФАР 6 четвертой ДШД соединен с блоком цифрового управления приводом (БЦУП) РЛС 9, который шестой ДШД соединен с блоком обработки угловой информации (БОУИ) 11; блок ввода-вывода информации (БВВИ) 19 девятнадцатой ДШД связан с потребителем этой информации и является выходом комплекса.
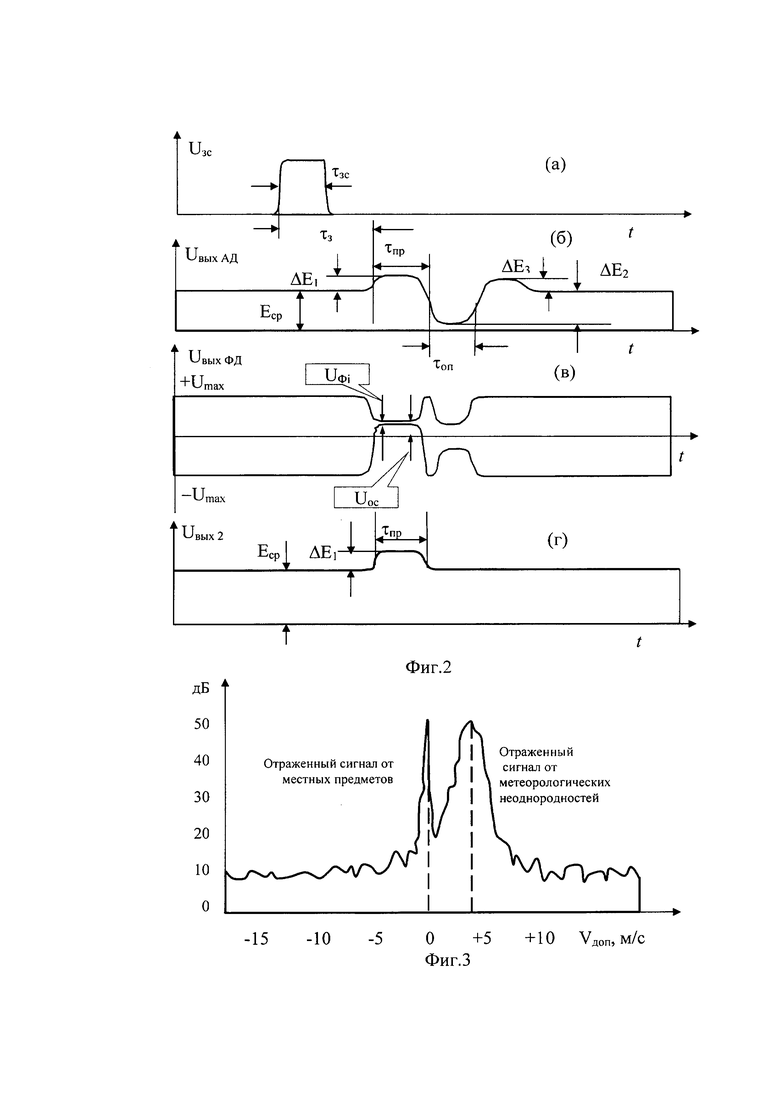
На фиг. 2 приведены осциллограммы ответного сигнала сверхрегенеративного приемопередатчика АРЗ по каналу дальности на выходе амплитудного и фазового детекторов приемного устройства РЛС в различных режимах работы. На фиг. 2 приведены обозначения и названия следующих сигналов:
(а) - огибающая запросных радиоимпульсов РЛС, Uзс;
(б) - ответный сигнал СПП на выходе амплитудного детектора РЛС в режиме «ответной паузы», Uвых;
(в) - ответный сигнал СПП на выходе фазового детектора когерентной РЛС, UФД;
(г) - ответный сигнал СПП на выходе амплитудного детектора в режиме «первичной реакции», U2.
Еср - средняя энергия радиоимпульсов СПП на выходе приемного устройства РЛС;
ΔE1 - энергия первичной реакции радиоимпульсов СПП;
ΔЕ2 - энергия вторичной реакции радиоимпульсов СП;,
ΔЕ3 - энергия третичной реакции радиоимпульсов СПП;
ΔЕос - энергия ответного сигнала СПП;
Umax - максимальна амплитуда сигнала на выходе ФД;
UФi - амплитуда шумов ФД в течение ответного сигнала;
Uос - мгновенное значение доплеровского сигнала на выходе ФД;
τзс - длительность радиоимпульса запросного сигнала РЛС;
τз - длительность задержки переднего фронта радиоимпульса СПП;
τпр - длительность приемного интервала СПП;
τос - длительность ответного сигнала.
Для описания работы МАК приводятся основные технические характеристики когерентной аэрологической РЛС:
- диапазон рабочих частот, МГц 1670-1690;
- импульсная мощность передатчика, Вт, не менее 1000;
- чувствительность приемника, минус дБ/Вт, не хуже 130;
- полоса пропускания усилителя промежуточной
частоты (УПЧ) приемника, МГц 0,7-4,0;
- длительность зондирующих радиоимпульсов, мкс 0,5-3,0;
- ширина диаграммы направленности (ДН) ФАР, град. 6,0;
- диапазон изменения углового положения ДН
по углу места (ε), град. 0-180;
- диапазон изменения углового положения ДН
по азимуту (β), град. 0±360;
МАК может работать в следующих режимах:
В первом режиме работы РЛС осуществляет зондирование атмосферы при работе с штатными радиолокационными радиозондами АРЗ 4 (5) типа МРЗ-3, МРЗ-3МК снабженными сверхрегенеративными приемопередатчиками-ответчиками (СПП) работающими в диапазоне частот 1670-1690 МГц. Координаты АРЗ определяется путем измерения его угловых координат методом равносигнальной зоны и определения наклонной дальности путем излучения передатчиком РЛС (7) запросного сигнала Uзс (см. фиг. 1). СПП АРЗ 4 формирует ответный сигнал по дальности в виде «первичной реакции» (см. фиг. 1, г) или «ответной паузы» (см. фиг. 1, б). В когерентном режиме работы РЛС ответный сигнал СПП на выходе ФД позволяет дополнительно определить мгновенную скорость движение АРЗ за счет эффекта Доплера (см. фиг. 1, в). Автосопровождение ответного сигнала по дальности и измерение угловых координат АРЗ обеспечивает непрерывное определение его пространственных координат. СПП АРЗ 4 (5) передает пакетную телеметрическую информацию по радиоканалу РК3 1670-1690 МГц, которая через блоки 5, 8, 10, 12 и 15 поступает в блоки 11, 13, 17, в которых происходит обработка координатно-телеметрической информации, осуществляется расшифровка принятых информационных пакетов АРЗ 4 (5). Это обеспечивает непрерывное автосопровождение АРЗ по пространственным координатам, построение профиля метеорологических параметров и ее вывод потребителю [1-3].
Во втором, радиопеленгационном режиме РЛС осуществляет зондирование атмосферы при работе с штатными радиопеленгационными радиозондами АРЗ (4) типа МРЗ-3, с снабженными дополнительно датчиками давления для измерения высоты подъема радиозонда. РЛС состоит из блоков (7), (8), (9), (10), (11), (13), (14), (16). Передатчик АРЗ (4) передают пакетную информацию по радиоканалу РК3 1670-1690 МГц. Блок цифрового управления (15) взаимодействует блоками 9, 11, 13, осуществляет расшифровку принятых информационных пакетов АРЗ 4, обеспечивает непрерывное автосопровождение АРЗ по пространственным координатам, построение профиля метеорологических параметров и ее вывод потребителю [1-3].
Третий режим CP предусматривает работу РЛС с навигационными радиозондами АРЗ 3. В этом режиме в работе РЛС участвуют блоки (7), (8), (9), (10), (11), (13), (14), (16). Однако РЛС работает во взаимодействии с навигационными радиозондами АРЗ 3 снабженными приемниками навигационных сигналов СНРС ГЛОНАСС/GPS (1) поступающих по радиоканалу РК 1 1575-1610 МГц в приемное устройство АРЗ 3. Навигационный аэрологический радиозонд АРЗ 3 снабжен передатчиком, работающим на частоте радиоканала РК 2 1670-1690 МГц. АРЗ 3 передает на РЛС измеренные координаты своего положения в пространстве и метеорологические параметры атмосферы. РЛС работает только в режиме приема сигналов навигационного АРЗ 3. Блок цифрового управления (15) взаимодействует блоками 9, 11, 13, осуществляет расшифровку принятых информационных пакетов АРЗ 3, обеспечивает непрерывное автосопровождение АРЗ по пространственным координатам, построение профиля метеорологических параметров и ее вывод потребителю [1-3].
В четвертом режиме (беззондового) определения параметров вертикального профиля ветра РЛС осуществляет зондирование атмосферы мощными когерентными радиоимпульсами. Метеорологическими отражателями, непосредственно связанными с движение воздушных масс - ветром, являются неоднородности диэлектрической проницаемости атмосфере. Период повторения радиоимпульсов РЛС определяет диапазон рабочих высот, составляет десятки и сотни микросекунд (200-15000 метров). Принимаемый РЛС сигнал формируется от неоднородностей в отражающем объеме, эффективные размеры которого определяются длительностью радиоимпульсов (длиной отражающего объема), шириной диаграммы направленности (диаметром отражающего объема) и значением исследуемого интервала высот. РЛС принимает и накапливает энергию отраженного сигнала от отражающего объема в течение определенного времени. Движения неоднородностей в отражающем объеме, связанные с ветром, вызывают доплеровское смещение частоты отраженного сигнала относительно зондирующего сигнала, которое может быть измерено на выходе ФД когерентной РЛС. Измерение движения неоднородностей в отражающем объеме (доплеровское смещение частоты) осуществляется при отклонении диаграммы направленности (ДН) РЛС от вертикали на рекомендуемые углы γ=15-20°.
Параметры ветра описываются скоростью V(H) и направлением αо(Н) являющиеся функциями высоты и времени. Пространственные изменения воздушного потока характеризуются скоростью Vг(x, у, Н, t) и направлением αо(х, у, Н, t) на высоте Н.
Величина доплеровского сдвига отраженного сигнала, направление зондирования и длина волны зондирующего сигнала связана с параметрами отражающего объема воздушного потока на высоте Н следующим соотношением:

где Vг - горизонтальная составляющая ветра; Vв - вертикальная составляющая ветра; х, у - координаты рассеивающего объема на высоте Н; αз - направление зондирования; β - угол места.
Скорость горизонтальной составляющей ветра может быть определена по соотношению

γ - угол отклонения ДН РЛС от вертикали.
Накопление энергии сигнала от исследуемого отражающего объема в течение определенного времени позволяет путем цифровой обработки оценить среднюю скорость движения метеорологических неоднородностей. Для определения профиля ветра измерения проводят для разных углов наклона диаграммы направленности РЛС относительно вертикали и на разных временных интервалах накопления энергии в пределах периода повторения радиоимпульсов. Такой метод позволяет последовательно построить вертикальный профиль скорости и направления ветра [4].
На фиг. 3 приведен вид спектральной плотности отраженного радиолокационного сигнала от метеорологических неоднородностей атмосферы (на некотором интервале высот наблюдения и накопления информации отраженного сигнала) и местных предметов. Максимум огибающей спектральной плотности доплеровского сигнала позволяет оценить среднюю скорость ветра (м/с) на некоторой высоте измерений. Максимум спектральной плотности доплеровского сигнала связан с серединой отражающего объема (интервала высот).
Технические характеристики когерентной аэрологической РЛС, приведенные выше, позволяют осуществлять измерения параметров ветра в приземном слое 1000-3000 метров. Блок управления приводом ФАР обеспечивает любое направление ДН для оптимального определения параметров ветра в рекомендуемом диапазоне углов относительно нормали.
Назначения блоков и узлов РЛС МАК:
- ФАР 5 обеспечивает излучение запросных радиоимпульсов когерентного передатчика 7 для измерения импульсным методом наклонной дальности до АРЗ, снабженных сверхрегенеративным приемопередатчиком и прием сигналов АРЗ всех типов. ФАР также обеспечивает излучение зондирующих радиоимпульсов когерентного передатчика 7 и прием отраженного сигнала от метеорологических отражателей в режиме измерения параметров ветра без запуска АРЗ. Автосопровождение АРЗ по углам осуществляется методом «равносигнальной зон»;
- когерентный передатчик 7 обеспечивает излучение запросных и зондирующих радиоимпульсов, совместно с блоками БЦОС 12 и БАФОСД 13 обеспечивает когерентный режим обработки принимаемых сигналов;
- ЭМП 6 обеспечивает поворот ФАР в угломестной и азимутальной плоскостях по командам БЦУ 15;
- Циркулятор 8 осуществляет распределение мощности радиоимпульсов когерентного передатчика 7 на вход ФАР 5 и принимаемых сигнала ФАР 5 на вход аналогово приемника 10;
- Аналоговый приемник 10 осуществляет прием сигналов АРЗ, отраженного сигнала от метеорологических отражателей в режиме измерения параметров ветра без запуска АРЗ, их усиление, фильтрацию, перенос спектра сигнала на промежуточную частоту (60 МГц);
- БЦОС 12 содержит эталонный высокостабильный задающий генератор, осуществляет преобразование аналогового сигнала в цифровой код и цифровую фильтрацию принятых сигналов;
- БЦУ 15 распределяет информацию в цифровом виде по всем функциональным блокам РЛС в соответствии с командами АРМ оператора РЛС 18.
- БОУИ 11 определяет методом «равносигнальной зоны» направление пеленга на АРЗ, обеспечивают автоматическое сопровождение радиозонда по угловым координатам - азимутальной (β) и угломестной (ε) плоскостям;
- БЦУП 9 вырабатывает цифровой код управления двигателями ЭМП 6;
- БКФ 16 осуществляет контроль функционирования РЛС по командам БЦУ 15 при включении РЛС.
- Блок осциллографа и анализатора спектра (14) используется во всех режимах работы РЛС, обеспечивает оценку помеховой обстановки в полосе рабочих частот 1670-1690 МГц, наблюдение временных и спектральных параметров принимаемых сигналов радиозондов, служебных сигналов РЛС, существенно облегчает работу оператора РЛС при сопровождении АРЗ в полете и радиолокационным измерениям параметров атмосферы;
- БОМИ 17 производит обработку метеорологической информации получаемой от АРЗ или путем зондирования метеорологических отражателей;
- АРМ оператора РЛС 18 позволяет управлять РЛС во всех режимах работ;
- УВВИ 19 обеспечивает ввод исходных данных необходимых для начала зондирования атмосферы и вывод потребителю полученной метеорологической информации в стандартном виде.
Предложенный МАК работает в следующих режимах:
- в штатном радиолокационном режиме с серийными АРЗ снабженными радиолокационными сверхрегенеративными приемопередатчиками в диапазоне 1680±10 МГц;
- в штатном радиопеленгационном режиме с серийными АРЗ в диапазоне 1680±10 МГц снабженными датчиками давления;
- в радионавигационнм режиме с навигационными АРЗ снабженными приемниками сигналов СНРС ГЛОНАСС/GPS и передатчиками, работающими в диапазоне 1680±10 МГц;
- в радиолокационном режиме зондирования метеорологических параметров атмосферы для определения вертикального профиля направления и скорости ветра без запуска АРЗ.
Таким образом, предлагаемое техническое решение позволяет существенно повысить тактико-технические и эксплуатационные характеристики отечественных CP:
- автосопровождение ответного сигнала радиолокационных АРЗ по дальности обеспечивается в режиме «первичной реакции», «ответной паузы», по доплеровскому сигналу СПП.
- автосопровождение сигнала АРЗ осуществляется в радионавигационном режиме без излучения запросного сигнала РЛС. При этом обеспечивается высокая точность определения текущих координат АРЗ (±15 м), направления и скорости ветра во всем оперативном радиусе действия CP, не менее 250 км.
- упрощается режим запуска навигационного АРЗ, поскольку при возможном срыве автосопровождения по угловым координатам прием сигнала АРЗ в ближней зоне (до 1-3 км) обеспечивается за счет боковых лепестков ДН РЛС, а координатная информация, передаваемая навигационным АРЗ, обеспечивает наведение антенны РЛС на АРЗ и автосопровождение по углам в течение полета АРЗ.
- для повышения ЭМС CP, мощность излучения передатчика радионавигационного АРЗ (3) в диапазоне 1680±10 МГц может быть снижена на 10-15 дБ (вплоть до 10 мВт) за счет усиления антенны РЛС (до 15 дБ). Важную роль для повышения помехоустойчивости играет дополнительная пространственная селекция сигнала АРЗ узконаправленной антенной РЛС.
- навигационный АРЗ снабжен передатчиком, работающем на несущей частоте существующих радиолокационных CP в диапазоне 1670-1690 МГц. Несущая частота передатчика АРЗ задается синтезатором с относительной точностью ±10-5 с узкополосной частотной или фазовой модуляцией несущей частоты и малым уровнем внеполосных излучений.
- пакетный режим работы навигационного АРЗ (см. Патент РФ на полезную модель №63551. Госреестр ПМ РФ от 27.05.2007; Патент РФ на полезную модель №106395. Госреестр ПМ РФ от 10.07.2011.), снижает влияние замираний сигнала АРЗ из-за его раскачивания, поскольку полный цикл приема метеорологической информации в цифровом виде происходит в течение короткого времени (1-2 секунды).
Литература
1. Киселев В.Н., Кузнецов А.Д. Методы зондирования окружающей среды (атмосферы). Учебник. - СПб, изд. РГГМУ, 2004, - 429 с.
2. Ермаков В.И., Кузенков А.Ф., Юрманов В.А. Системы зондирования атмосферы. Л.: Гидрометиздат, 1977. 304 с.
3. Ефимов А.А. Принципы работы аэрологического информационно-вычислительного комплекса АВК - 1. М.: Гидрометеоиздат, 1989. 149 с.
4. А.Г. Горелик, С.Ф. Коломиец, Г.Г. Щукин. Информационные возможности ветровых профайлеров при зондировании атмосферы. // Метеорология. Ученые записки №18, МГАПИ, 2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2793597C1 |
| НАВИГАЦИОННО-РАДИОЛОКАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2805163C1 |
| Многофункциональная система радиозондирования атмосферы | 2016 |
|
RU2626410C1 |
| УНИФИЦИРОВАННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2014 |
|
RU2576023C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ С ФАЗОМОДУЛИРОВАННЫМ КАНАЛОМ ТЕЛЕМЕТРИИ | 2021 |
|
RU2787777C1 |
| СПОСОБ ПЕРЕДАЧИ КОМАНД УПРАВЛЕНИЯ НА БОРТ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2804516C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ СИСТЕМА | 2011 |
|
RU2480791C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2014 |
|
RU2571870C1 |
| СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ С ПАКЕТНОЙ ПЕРЕДАЧЕЙ МЕТЕОРОЛОГИЧЕСКОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529177C1 |
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
Изобретение относится к радиотехнике, точнее к радиолокации, и может быть использовано при разработке систем радиозондирования атмосферы (CP), построенных на основе применения радиолокационного метода и использования сигналов спутниковых навигационных радиоэлектронных систем (СНРС) ГЛОНАСС/GPS для определения пространственных координат аэрологических радиозондов (АРЗ), передачи координатной и телеметрической информации на наземную базовую станцию (БС), а также определения направления и скорости ветра радиолокационным методом без запуска АРЗ. Технический результат состоит в расширении функциональных возможностей CP атмосферы. Для этого применяют РЛС для определения вертикального профиля скорости и направления ветра без применения АРЗ, а также вводят режим непосредственного радиолокационного зондирования метеорологических параметров атмосферы для получения оперативной информации о параметрах вертикального профиля ветра - направлении и скорости без запуска АРЗ в атмосферу, обеспечения работы CP в стандартных радиолокационном, радиопеленгационном и радионавигационном режимах определения текущих координат АРЗ. 3 ил.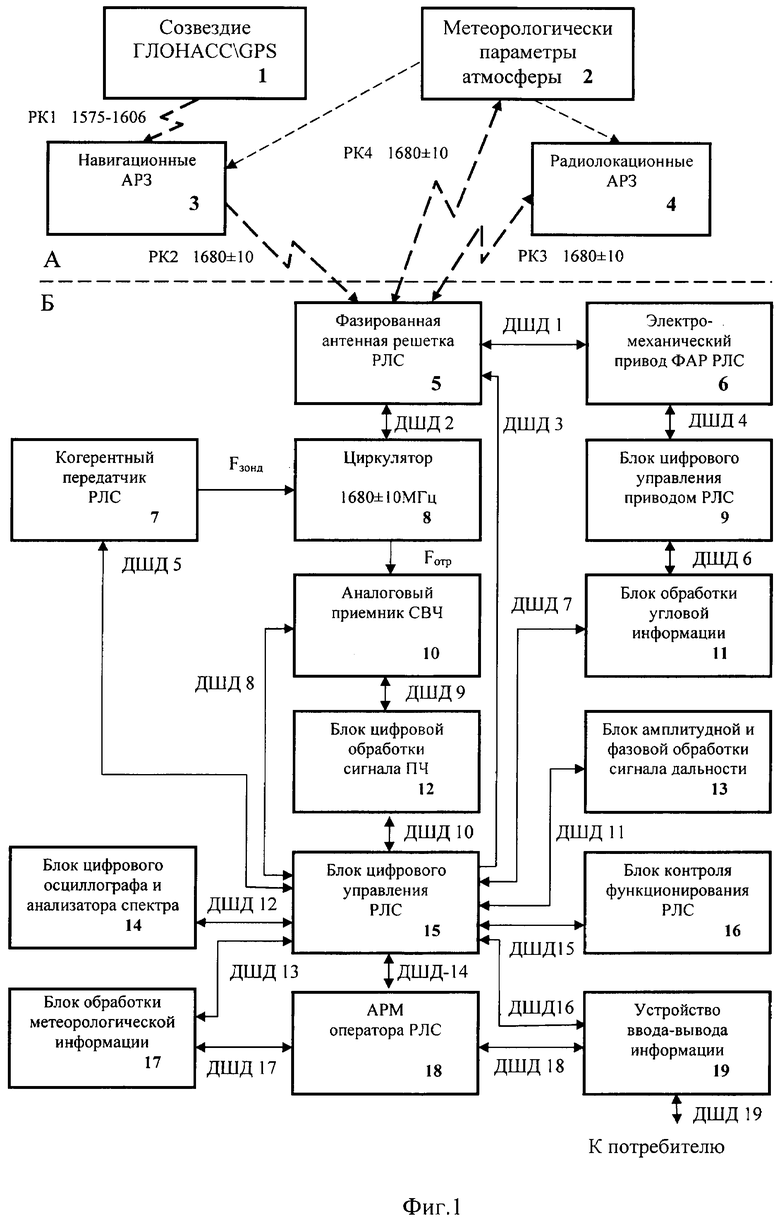
Многорежимный аэрологический комплекс, состоящий из двух основных частей: пространственной (А) и наземной (Б), причем пространственная часть содержит созвездия СНРС ГЛОНАСС/GPS, метеорологические параметры атмосферы, навигационные и радиолокационные АРЗ, а наземная часть состоит из многорежимной радиолокационной станции - РЛС, которая содержит следующие блоки: фазированную антенную решетку (ФАР) с электромеханическим приводом (ЭМП), когерентный передатчик, циркулятор, блок цифрового управления приводом (БЦУП), аналоговый приемник СВЧ, блок обработки угловой информации (БОУИ), блок цифровой обработки сигналов ПЧ (БЦОС), блок амплитудной и фазовой обработки сигнала дальности (БАФОС), блок цифрового осциллографа и анализатора спектра, блок цифрового управления (БЦУ) РЛС, блок контроля функционирования (БКФ) РЛС, блок обработки метеорологической информации (БОМИ), АРМ оператора РЛС и блок ввода-вывода информации (БВВИ), причем обе части имеют следующие соединения: созвездия СНРС ГЛОНАСС/GPS связаны первым радиоканалом РК1 с навигационными АРЗ, которые вторым радиоканалом РК2 связаны с ФАР, радиолокационные АРЗ третьим радиоканалом РКЗ связаны с ФАР, метеорологические параметры атмосферы четвертым радиоканалом РК4 также связаны с ФАР; ФАР второй дуплексной шиной (ДШД) связана с входом/выходом циркулятора, а первой ДШД - с ЭМП ФАР; выход когерентного передатчика fзонд связан с входом циркулятора, выход которого fпр соединен с входом аналогового приемника, который в свою очередь восьмой ДШД соединен непосредственно с блоком цифрового управления РЛС, а девятой ДШД через блок цифровой обработки сигналов ПЧ десятой ДШД также соединен с этим блоком, также с ним двенадцатой и тринадцатой ДШД соединены блоки БЦОС и БОМП непосредственно, БОМП семнадцатой ДШД соединен с АРМ, который четырнадцатой ДШД соединен с БЦУ РЛС, однонаправленная шина с его выхода соединена с ФАР; БЦУ РЛС седьмой ДШД соединен с блоком обработки угловой информации (БОУИ), одиннадцатой ДШД - с блоком амплитудной и фазовой обработки сигнала (БАФОС), пятнадцатой ДШД - с БКФ, шестнадцатой ДШД - с блоком ввода-вывода информации (БВВИ), также с которым восемнадцатой ДШД соединен АРМ; ЭМП ФАР четвертой ДШД соединен с блоком цифрового управления приводом (БЦУП) РЛС, который шестой ДШД соединен с блоком обработки угловой информации (БОУИ); блок ввода-вывода информации (БВВИ) девятнадцатой ДШД связан с потребителем этой информации и является выходом комплекса.
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2014 |
|
RU2571870C1 |
| Способ синтеза металл-графеновых нанокомпозитов | 2015 |
|
RU2623410C2 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| КОРРЕКТОР ВРЕМЕННЫХ ИСКАЖЕНИЙ ВИДЕОСИГНАЛА ДЛЯ ВИДЕОМАГНИТОФОНА | 0 |
|
SU352413A1 |

