Изобретение относится к способам воздушной разведки наземных объектов и может быть использовано при создании новых и модернизации существующих систем воздушной разведки.
Известен способ воздушной разведки наземных объектов с использованием беспилотного летательного аппарата (БЛА) [1], который состоит в том, что предварительно на БЛА устанавливают полезную нагрузку (ПН) (телевизионную камеру, инфракрасную систему, радиолокационную станцию), радиоаппаратуру линии передачи данных (РЛПД), навигационную систему (НС), двигательную установку и автопилот с системой измерения углов Fк крена и Fт тангажа (СИКТ) БЛА, по прибытии БЛА в район разведки с помощью ПН получают на БЛА соответствующее отображение (телевизионное, инфракрасное, радиолокационное) наземных объектов (НО) на фоне земной поверхности (ЗП), с помощью НС определяют значения координат местоположения (KМП) БЛА, а с помощью СИКТ измеряют значения Fк и Fт. Через РЛПД передают с БЛА на наземный пункт (НП) сигналы, соответствующие этому отображению, КМП, Fк и Fт, принимают их на НП, где преобразуют эти сигналы в видимое отображение (ВО) НО на фоне ЗП, на ВО обнаруживают НО и опознают их как НО определенного класса, и с использованием ВО, КМП, Fк и Fт определяют координаты местоположения обнаруженных НО. Недостатком этого способа является низкая скрытность воздушной разведки, обусловленная инфракрасной и акустической заметностью БЛА в полете вследствие работы двигательной установки БЛА.
Известен также способ воздушной разведки наземных объектов с использованием беспилотного летательного аппарата (БЛА) с запуском из артиллерийских систем GLUAV [2], который состоит в том, что предварительно один БЛА устанавливают в артиллерийский пусковой контейнер (АрПК), в который также устанавливают вышибной заряд (ВЗ) и систему инициирования вышибного заряда (СИВЗ), на БЛА устанавливают полезную нагрузку (ПН) из одного датчика разведывательной информации (ДРИ), которым является телевизионная камера, или тепловизионная камера, или датчик для обнаружения химических агентов, или датчик для обнаружения биологических агентов, радиопередатчик (РПр), приемник глобальной спутниковой системы определения местоположения (ПССОМ), автопилот (АП) с системой измерения углов Fк крена и Fт тангажа (СИКТ) БЛА, складные аэродинамические плоскости, электроракетные двигатели, систему электропитания (СЭП) и парашютную систему (ПС). В АП предварительно вводят координаты заданного района разведки. После пуска АрПК из артиллерийской системы и при достижении им апогея в 3000-3500 м и скорости V, приближающейся к М=1 (М=V/Аз, Аз - скорость звука в воздухе), инициируют с помощью СИВЗ срабатывание ВЗ, БЛА выбрасывают из АрПК назад с помощью ВЗ и раскрывают парашют, с помощью которого притормаживают БЛА, включают в работу СЭП, ДРИ, АП, ПССОМ, РПр БЛА, который планирует затем в заданный район разведки, где с помощью ПН получают на БЛА отображение наземных объектов (НО) на фоне земной поверхности (ЗП), соответствующее типу установленного ДРИ, и электрические сигналы (ЭС), соответствующие этому отображению. На БЛА определяют значения координат местоположения (КМП) БЛА и измеряют значения Fк и Fт углов крена и тангажа БЛА. С помощью РПр на наземный пункт (НП) передают ЭС, КМП, Fк, Fт БЛА, принимают их на НП, где формируют видимое отображение (ВО) НО на фоне ЗП, соответствующее ЭС. На ВО обнаруживают НО и опознают их как НО определенного класса, и вычисляют КМП обнаруженных НО с использованием ВО, КМП, Fк, Fт. Недостатком этого способа является невысокое значение вероятности Ропи опознания на НП обнаруженных НО как истинных, а не ложных, НО этого класса.
Прототипом заявляемого изобретения следует считать способ воздушной разведки наземных объектов с использованием беспилотного летательного аппарата (БЛА) с запуском из артиллерийских систем [2], общими признаками которого с заявляемым изобретением является то, что предварительно БЛА устанавливают в ПК, в который также устанавливают ВЗ и СИВЗ, на БЛА устанавливают ПН, РПр, ПССОМ, СИКТ, ПС, СЭП. После пуска ПК с помощью СИВЗ инициируют срабатывание ВЗ, БЛА выбрасывют назад из ПК с помощью ВЗ, раскрывают ПС, с помощью которой притормаживают БЛА, и включают в работу ПН, ПССОМ, СИКТ, СЭП, РПр БЛА. В заданном районе разведки с помощью ПН получают на БЛА отображение НО на фоне ЗП, соответствующее типу ПН, и ЭС, соответствующие этому отображению, определяют на БЛА значения КМП БЛА и измеряют значения Fк и Fт углов крена и тангажа БЛА. С помощью РПр передают на НП ЭС, КМП, Fк, Fт и принимают их на БНП, где формируют ВО НО на фоне ЗП, соответствующее ЭС. На ВО обнаруживают НО и опознают их как НО определенного класса, и с использованием ВО, КМП, Fк, Fт вычисляют КМП обнаруженных НО.
Кроме того, в прототипе в качестве ПК используют АрПК, в который устанавливают один БЛА, ПН состоит из одного ДРИ, которым является телевизионная камера, или тепловизионная камера, или датчик для обнаружения химических агентов, или датчик для обнаружения биологических агентов, на БЛА устанавливают складные аэродинамические плоскости и электроракетные двигатели, предварительно в АП БЛА вводят координаты заданного района разведки, АрПК выстреливают из артиллерийской системы и выбрасывают БЛА из АрПК при достижении АрПК апогея в 3000-3500 м и скорости, приближающейся к М=1, после чего БЛА планирует в заданный район разведки.
Недостатком прототипа является невысокое значение вероятности Ропи опознания на НП обнаруженных НО как истинных, а не ложных, НО определенного класса. Это обусловлено тем, что ДРИ, который устанавливают в ПН БЛА, получает сигналы от НО лишь в одном (видимом или инфракрасном) диапазоне длин волн (ДЛВ) электромагнитного излучения (ЭМИ). В результате в прототипе на БЛА получают "портрет" НО в оптическом ДЛВ ЭМИ, который назовем "портретом НО в оптическом диапазоне" ("ПООД"), или "портрет" НО в инфракрасном ДЛВ ЭМИ, который назовем "инфракрасным портретом НО" ("ИПО"), и ЭС, соответствующие "ПООД" или "ИПО". Эти ЭС передают на НП, где их принимают и формируют ВО НО на фоне ЗП, соответствующее этим ЭС. Таким образом, на НП получают ВО НО на фоне ЗП, соответствующее "ПООД", которое назовем видимым "портретом" "ПООД" ("ВППООД"), или ВО НО на фоне ЗП, соответствующее "ИП", которое назовем видимым "портретом" "ИПО" ("ВПИПО"). При опознании НО сравнивают характерные признаки его видимого "портрета" с характерными признаками известных видимых "портретов" НО различных классов (например, автомобилей разных типов, сооружений и т.д.) и отождествляют обнаруженный НО с тем из известных НО, с видимым "портретом" которого видимый "портрет" обнаруженного НО имеет наибольшее сходство. Поэтому, если обнаруженный НО является ложным НО (ЛНО), но его видимый "портрет" идентичен известному видимому "портрету" истинного НО (ИНО) определенного класса, то с одинаковой вероятностью, равной 0,5, обнаруженный НО можно отнести к ИНО этого класса или к ЛНО. Таким образом, значение вероятности Ропи того, что обнаруженный НО является истинным, например танком, или ложным, например макетом танка, составляет 0,5 при идентичности видимых "портретов" ИНО и ЛНО, и увеличивается с ростом различий между видимыми "портретами" ИНО и ЛНО.
Для "ВППООД" НО характерными признаками, позволяющими опознать этот НО, являются конфигурация, соотношения между геометрическими размерами и цвет НО. Очевидно, что если создать макет, аналогичный соответствующему НО по конфигурации, геометрическим размерам и окраске, что вполне осуществимо и сравнительно недорого (надувные макеты), то при всех ракурсах "ВППООД" ИНО и ЛНО будут идентичны, и следовательно, при использовании на БЛА одного телевизионного ДРИ значение вероятности Ропи, которую в этом случае обозначим Ропив, составляет
Ропи=Ропив=0,5. (1)
Характерными признаками "ВПИЛО" НО, которые позволяют опознать этот НО, являются взаимное расположение на НО источников инфракрасного излучения (ИМИ), спектральный состав и интенсивность этого излучения от этих ИМИ. Поэтому, расположив на макете НО соответствующим образом НИИ соответствующих спектральных составов и интенсивности, можно создать ЛНО, "ВПИПО" которого будет в значительной мере похож на "ВПИПО" соответствующего ИНО. Однако, "ВПИПО" ИНО весьма сложен. Поэтому создание ЛНО, "ВПИПО" которого при всех ракурсах был бы аналогичен "ВПИПО" ИНО соответствующего класса, по-видимому, невозможно, и при некоторых ракурсах наблюдения будут различия между "ВПИПО" ИНО и "ВПИПО" ЛНО. Это увеличивает значение Ропи и при использовании на БЛА только одного тепловизионного ДРИ для вероятности Ропи, которую в этом случае обозначим Ропии, можно принять
Ропи=Ропии=0,5...0,6. (2)
Следовательно, при установке на БЛА полезной нагрузки, получающей отображение НО только в одном ДЛВ ЭМИ, как это имеет место в прототипе, значение вероятности Ропи опознания на НП обнаруженного НО как истинного, а не ложного, НО определенного класса, с учетом (1) и (2) не превышает 0,6, т.е. является невысоким.
Целью изобретения является устранение указанного недостатка прототипа, а именно, повышение значения вероятности Ропи опознания обнаруженных в процессе воздушной разведки НО как истинных НО определенного класса, а не ложных НО.
Для достижения этой цели в заявляемом изобретении используют авиационный пусковой контейнер (АПК), который предварительно устанавливают на летательный аппарат (ЛА), в АПК предварительно устанавливают не менее двух беспилотных летательных аппаратов (БЛА), в полезной нагрузке (ПН) каждого из которых устанавливают не менее двух датчиков разведывательной информации (ДРИ), каждый из которых может обнаружить электромагнитное излучение (ЭМИ) в оптическом, или инфракрасном, или радиолокационном диапазоне длин волн, или акустическое излучение (АИ) в соответствующем диапазоне длин волн, или присутствие в окружающей среде химических, радиационных или биологических агентов, причем в ПН всех БЛА, установленных в АПК, устанавливают не менее одного ДРИ указанных диапазонов длин волн ЭМИ и АИ, парашютную систему каждого БЛА составляют из вытяжного и основного парашютов, в вычислитель ЛА предварительно вводят заданные значения географической широты ГШр, географической долготы ГДр и высоты Нр над уровнем моря центра района разведки (ЦРР), горизонтальной дальности Дтр между точкой С сброса АПК с ЛА и ЦРР, высоты Нк над ЦРР точки инициирования срабатывания ВЗ, курса Кшт полета ЛА в момент сброса АПК без учета ветра, большой полуоси Ар и эксцентриситета Ер референц-эллипсоида Земли, углов Fx и Fy поля зрения каждого ДРИ в двух взаимно перпендикулярных плоскостях, баллистического коэффициента Сн АПК и заданную зависимость R(H) плотности R воздуха от высоты Н, а в вычислитель НП предварительно вводят значения Ар, Ер, Fx и Fy, на ЛА в процессе полета определяют вектор скорости ветра и с использованием значений ГШр, ГДр, Нр, Дтр, Нк, Кшт, Сн, зависимости R(H) и вектора скорости ветра вычисляют требуемые значения географической широты ГШс, географической долготы ГДс и высоты Нст над уровнем моря точки С сброса АПК с ЛА, а также требуемые значения скорости Vст, углов курса Кст и тангажа Тст ЛА в точке С и времени Трт инициирования срабатывания ВЗ после сброса АПК, вводят значение Трт в систему инициирования срабатывания ВЗ, управляют полетом ЛА так, чтобы вывести ЛА в точку С с параметрами полета Нст, Vст, Кcт и Тст, в точке С сбрасывают АПК с ЛА, через время Трт после сброса АПК инициируют срабатывание ВЗ, в результате срабатывания ВЗ отбрасывают назад заднюю крышку АПК, раскрывают вытяжной парашют каждого БЛА, с помощью этого парашюта извлекают этот БЛА из АПК и раскрывают основной парашют этого БЛА, в процессе снижения каждого БЛА на основном парашюте электрические сигналы с выхода ПН каждого БЛА, значения его Fк, Fт и координат местоположения передают на ЛА и принимают их на ЛА, на НП и на ЛА формируют видимые изображения НО на фоне ЗП, соответствующие электрическим сигналам, полученным от каждого ДРИ, обнаруживают НО на каждом из этих видимых изображений и опознают его как НО определенного класса, с использованием этих видимых изображений, значений Fк, Fт и координат местоположения соответствующих БЛА вычисляют значения координат местоположения НО, которые обнаружены на соответствующих видимых изображениях, и опознают как истинные, а не ложные, те из обнаруженных НО определенного класса, для которых совпадают значения координат их местоположения, полученные с использованием не менее чем двух этих видимых изображений.
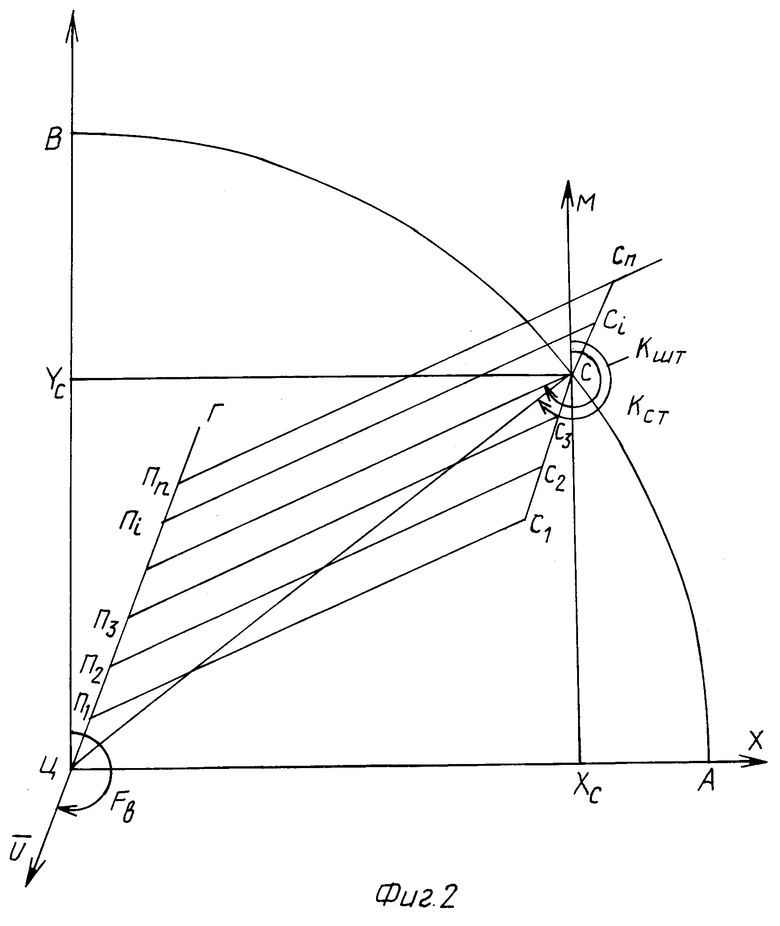
Существо изобретения поясняется схемами, которые показаны на фиг.1, фиг.2, фиг.3 и фиг.4. На фиг.1 показана схема выполнения воздушной разведки предлагаемым способом при установке в авиационный пусковой контейнер (АПК) трех беспилотных летательных аппаратов (БЛА). На фиг.1 обозначено: 1, 2, 3 - БЛА в процессе спуска на основных парашютах (ОП); 4 - АПК в процессе полета после сброса с летательного аппарата (ЛА); 5 - траектория полета АПК от момента сброса его с ДА в точке С до момента срабатывания вышибного заряда (ВЗ) АПК в точке Р; 6 - траектория полета ЛА после сброса АПК; 7 - наземный пункт (НП); 8 - линия радиосвязи БЛА 3 с НП (аналогичные линии радиосвязи для других БЛА не показаны, чтобы не загромождать схему); 9 - линия радиосвязи БЛА 3 с ЛА (аналогичные линии радиосвязи для других БЛА не показаны, чтобы не загромождать схему); 10 - положение задней крышки АПК после срабатывания ВЗ; 11 - вытяжные парашюты (ВП) БЛА; Нст, Vcт, Кст, Тст - потребные высота, скорость, курс и угол кабрирования полета ЛА в точке С сброса АПК; Ц - центр заданного района разведки (ЦРР); ГШр, ГДр, Нр - географические широта и долгота ЦРР, а также высота ЦРР над уровнем моря; Нк - высота над уровнем ЦРР точки Р; ЦХУ - прямоугольная система координат, начало которой находится в точке Ц, ось ЦХ направлена на восток по касательной к географической параллели, проходящей через точку Ц, ось ЦY направлена на север по касательной к географическому меридиану, который проходит через точку Ц; С’ - проекция точки С на горизонтальную плоскость ЦХY; Хс, Yc - координаты точки С’ в системе координат ЦХY; CM - направление географического меридиана в точке С; Дтр - расстояние между точками Ц и С в горизонтальной плоскости ЦХУ.
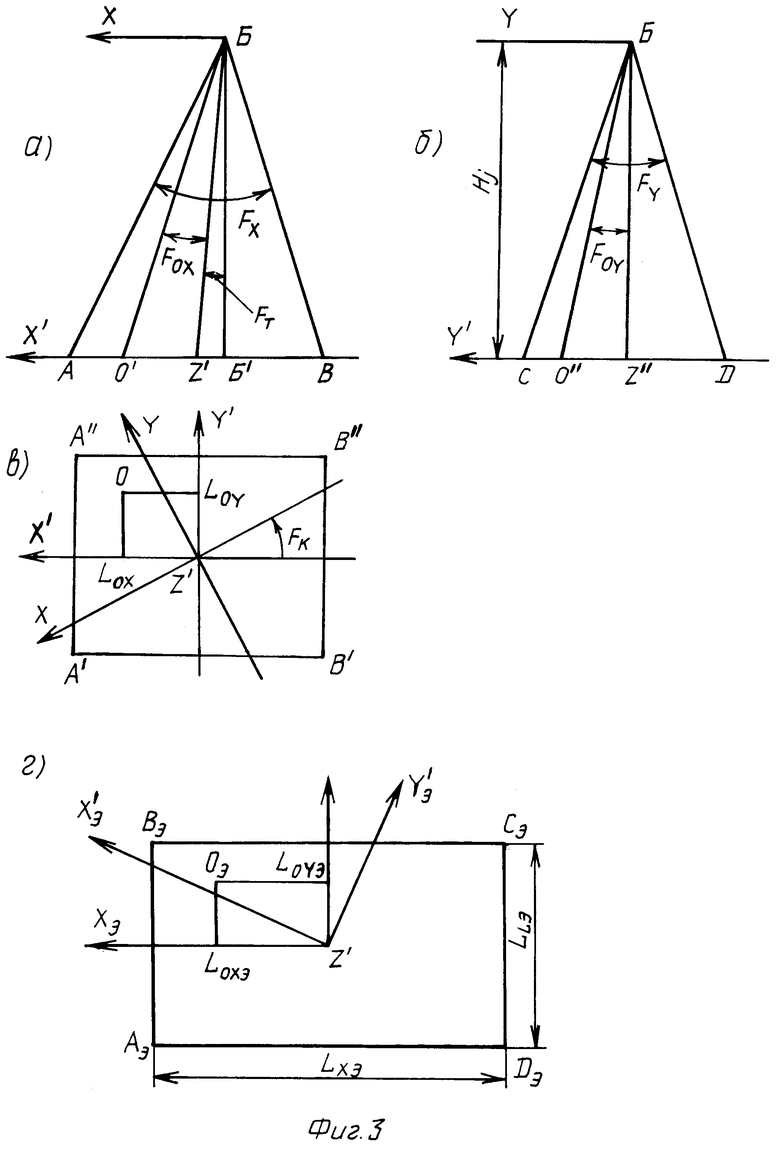
На фиг.2 показана схема определения требуемых значений координат точки С и параметров полета ЛА в этой точке. На фиг.2 обозначено: АВ - дуга окружности, радиус которой равен заданному значению Дтр;  - вектор скорости ветра; Fв - угол ориентации вектора
- вектор скорости ветра; Fв - угол ориентации вектора  относительно направления на север; ЦГ - прямая линия, проходящая через точку Ц параллельно вектору
относительно направления на север; ЦГ - прямая линия, проходящая через точку Ц параллельно вектору  ; ЦП1, ЦП2, ..., ЦПi, ..., ЦПn - отрезки прямой ЦГ, длина каждого ив которых равна длине пути, который пролетит АПК по направлению вектора
; ЦП1, ЦП2, ..., ЦПi, ..., ЦПn - отрезки прямой ЦГ, длина каждого ив которых равна длине пути, который пролетит АПК по направлению вектора  за соответствующее время Тпi (1=1, 2, ..., n) полета АПК от точки С до точки Р; П1С1, П2С2, ..., ПiCi, ..., ПnСn - отрезки прямых линий, проведенных под заданным углом Кшт курса ЛА, причем длина каждого из этих отрезков равна значению штилевого (без ветра) относа Аштi АПК, соответствующему заданным значениям высоты Hci, скорости Vci и угла Tci тангажа полета ЛА в точке С. Другие обозначения на фиг.2 аналогичны соответствующим обозначениям на фиг.1.
за соответствующее время Тпi (1=1, 2, ..., n) полета АПК от точки С до точки Р; П1С1, П2С2, ..., ПiCi, ..., ПnСn - отрезки прямых линий, проведенных под заданным углом Кшт курса ЛА, причем длина каждого из этих отрезков равна значению штилевого (без ветра) относа Аштi АПК, соответствующему заданным значениям высоты Hci, скорости Vci и угла Tci тангажа полета ЛА в точке С. Другие обозначения на фиг.2 аналогичны соответствующим обозначениям на фиг.1.
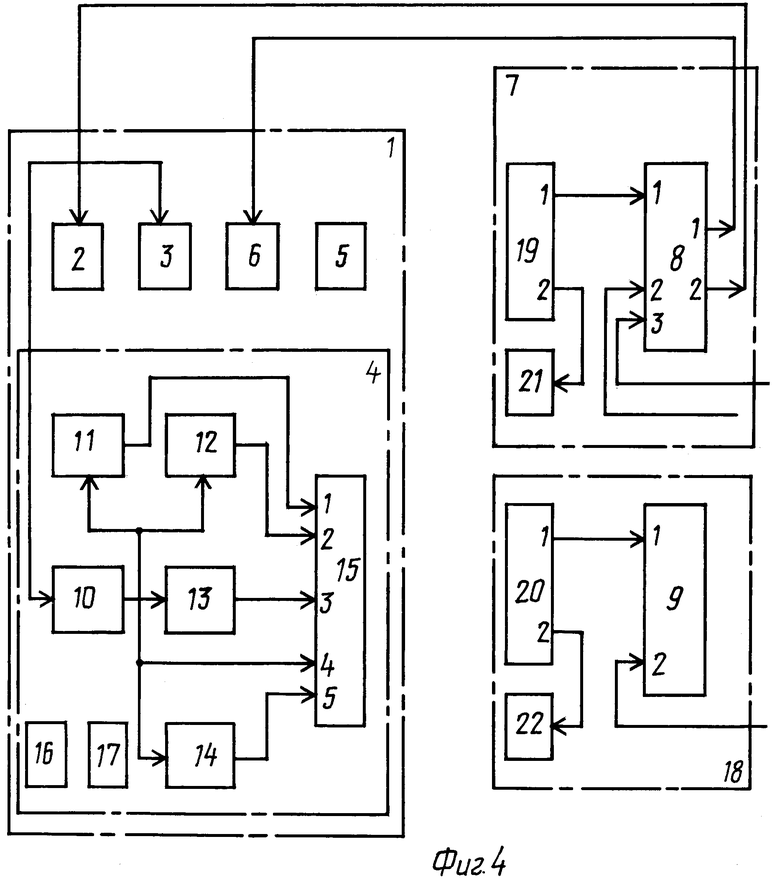
На фиг.3 показана схема определения координат одного обнаруженного наземного объекта (НО), причем на фиг.3а показана схема взаимного положения одного спускающегося на основном парашюте БЛА и НО в вертикальной плоскости БXZ связанной системы координат БЛА, на фиг.3б показана схема взаимного положения этого БЛА и НО в вертикальной плоскости БYZ связанной системы координат БЛА, на фиг.3в показан участок земной поверхности (ЗП), находящийся в поле зрения одного датчика разведывательной информации (ДРИ) этого БЛА, а на фиг.3г показан экран аппаратуры отображения информации, на котором отображается этот участок ЗП. На фиг.3 обозначено: Е - положение центра массы БЛА; EXY2 - прямоугольная связанная система координат, начало которой находится в точке Б, ось БZ направлена по продольной оси БЛА и проходит через центр поля зрения ДРИ, а взаимно перпендикулярные оси БХ и БY расположены в плоскости, которая перпендикулярна оси БZ; A’A’B’B"- участок ЗП, находящийся в поле зрения ДРИ; 0 - НО; 0, 0"- проекции НО на плоскости БXZ и БYZ соответственно; Fx - угол поля зрения ДРИ в плоскости БXZ; Fy - угол поля зрения ДРИ в плоскости БYZ; Fox - угол между осью БZ и направлением на НО в плоскости БXZ; Foy -угол между осью БZ и направлением на НО в плоскости БYZ; Fт - угол между осью БZ и вертикалью, называемый далее углом тангажа БЛА; Hj - высота местоположения БЛА; Z’ - точка пересечения оси БZ и горизонтальной плоскости Q, проходящей через точку 0; Z X Y - прямоугольная система координат с началом в точке Z’ и осями Z’X, Z’Y, расположенными в плоскости Q параллельно осям ЕХ и EY соответственно; Lox, Loy - координаты местоположения НО в системе координат Z’X’Y’; Z’XY – прямоугольная система координат, оси которой повернуты относительно осей системы координат Z’X’Y’ на угол Fк, называемый далее углом крена БЛА; ДэВэСэДэ - экран аппаратуры отображения АОн (АОл), установленной на НП (ЛА); ZэXэYэ - прямоугольная система координат с началом в центре экрана и осями, параллельными осям системы координат ZXY; ZэХэYэ - прямоугольная система координат с началом в центре экрана и осями, параллельными осям системы координат Z’X’Y’; Lxэ, Lyэ - длина и ширина экрана соответственно; Zэ - центр экрана.; Оэ - местоположение НО на экране; Loxэ, Loyэ - координаты точки Оэ в системе координат ZэXэYэ.
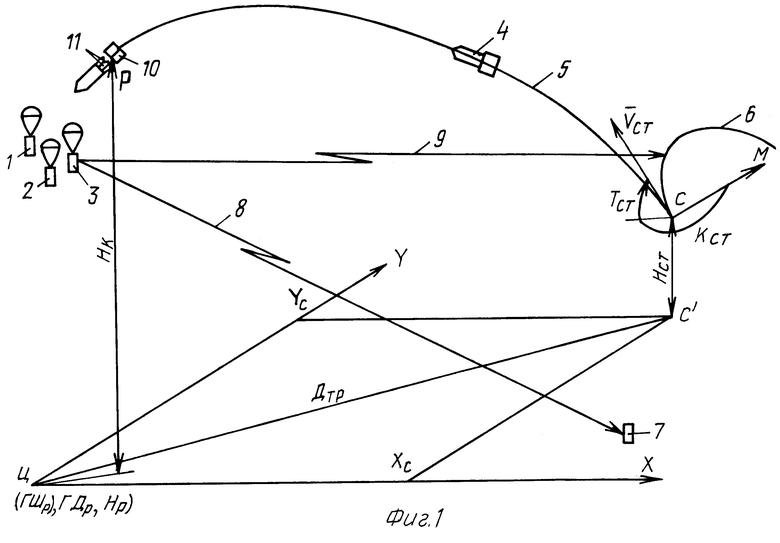
На фиг.4 показана блок-схема возможного варианта устройства, реализующего предлагаемый способ в соответствии с рассмотренным выше примером. На фиг.4 обозначено: 1 - авиационный пусковой контейнер (АПК); 2 - первый беспилотный летательный аппарат (БЛА); 3 - второй БЛА; 4 - третий БЛА; 5 - вышибной заряд (ВЗ); 6 - система инициирования ВЗ (СИВЗ); 7 - летательный аппарат (ЛА); 8 -вычислитель (Вл) ЛА; 9 - вычислитель (Вн) наземного пункта; 10 - система электропитания (СЭП) БЛА; 11 - система измерения углов крена и тангажа (СИКТ) БЛА; 12 - приемник глобальной спутниковой системы определения местоположения (ПССОМ) БЛА; 13 - первый датчик разведывательной информации (ДРИ) БЛА; 14 - второй ДРИ БЛА; 15 - радиопередатчик (РПр) БЛА; 16 - вытяжной парашют (ВП) БЛА; 17 - основной парашют (ОП) БЛА; 18 - наземный пункт (НП); 19 - радиоприемник ЛА (РПл); 20 - радиоприемник ПН (РПн); 21 - аппаратура отображения на ЛА (АОл), принятой от БЛА; 22 - аппаратура отображения на НП (АОн) информации, принятой от БЛА. Устройства, которые входят в состав АПК 1, БЛА 4, НП 18, ЛА 7, ограничены пунктирными линиями. Так как состав БЛА 2, БЛА 3 и БЛА 4 одинаков, то на блок-схеме подробно показан только состав БЛА 4. Электрические связи между составными частями блок-схемы показаны сплошными линиями. В устройствах, имеющих два и более входов (выходов), соответствующие входы (выходы) пронумерованы.
Существо предлагаемого способа состоит в следующем. Предварительно АПК устанавливают на ЛА. В АПК предварительно устанавливают не менее двух БЛА (например, три БЛА, как на фиг.1), ВЗ и СИВЗ. Предварительно в каждый БЛА устанавливают ПН, в состав которой включают не менее двух ДРИ, каждый из которых обеспечивает получение от наземных объектов ЭМИ в оптическом диапазоне длин волн, или в инфракрасном диапазоне длин волн, или в радиолокационном диапазоне длин волн, или АИ в диапазоне частот от 100 Гц до 12 кГц, причем в состав ДРИ всех БЛА, установленных в АПК, включают не менее одного ДРИ указанных диапазонов длин волн ЭМИ или диапазонов частот АИ. Например, в БЛА 1 (фиг.1) устанавливают телевизионный ДРИ (ТДРИ), с помощью которого получают ЭМИ в оптическом диапазоне длин волн, и акустический ДРИ (АДРИ), с помощью которого получают АИ в диапазоне частот от 100 Гц до 2 кГц:, в БЛА 2 (фиг.1) устанавливают инфракрасный ДРИ (ИДРИ), с помощью которого получают ЭМИ в инфракрасном диапазоне длин волн, и АДРИ, с помощью которого получают АИ в диапазоне частот от 2 кГц до 8 кГц, а в БЛА 3 (фиг.1) устанавливают радиолокационный ДРИ (РДРИ), с помощью которого получают ЭМИ в радиолокационном диапазоне длин волн, и АДРИ, с помощью которого получают АИ в диапазоне частот от 8 кГц до 12 кГц. Также в каждый БЛА устанавливают СИКТ, РПр, ПССОМ, СЭП и парашютную систему, в состав которой включают ВП и OП.
На наземном пункте (НП) предварительно устанавливают вычислитель (Вн), радиоприемник (РПн) радиосигналов от БЛА, а также аппаратуру отображения (АОн) информации, принятой от БЛА.
На ЛА предварительно устанавливают вычислитель (Вл), радиоприемник (РПл) радиосигналов от БЛА, а также аппаратуру отображения (АОл) информации, принятой от БЛА.
В вычислитель Вл предварительно вводят заданные значения географических широты ГШр и долготы ГДр ЦРР, а также высоты Нр ЦРР над уровнем моря, высоты Нк точки Р, расстояния Дтр между точками С и Ц (фиг.1), курса Кшт полета ЛА в момент сброса К без учета ветра (фиг.2), большой полуоси Ар и эксцентриситета Ер референц-эллипсоида Земли, баллистического коэффициента Сн АПК, углов Fxjq и Fyjq поля зрения в двух взаимно перпендикулярных плоскостях каждого ДРИjq (j=1, 2, ..., N; N - количество БЛА, установленных в АПК; q=1, 2, ..., Lj; Lj - количество ДРИ, установленных на каждом БЛА j), а также зависимость R(H) плотности R воздуха от высоты Н в соответствии с таблицей стандартной атмосферы.
В вычислитель Вн предварительно вводят заданные значения Ар, Ер, Fxjq и Fyjq.
В процессе полета ЛА на ЛА определяют модуль U и угол Fв ориентации вектора  скорости ветра и с использованием значений ГШр, ГДр, Нр, Дтр, Нк, Кшт, Сн, Ар, Ер, U, Fв и зависимости R(H) вычисляют на ЛА потребные значения географических широты ГШс и долготы ГДс, а также высоты Нст над уровнем моря точки С сброса АПК, потребные значения скорости Vст, углов курса Кст и тангажа Тст полета ЛА при сбросе АПК (фиг.1) и времени Трт задержки срабатывания ВЗ АПК после сброса АПК с ЛА. Для этого вначале вычисляют значение Нрм высоты над уровнем моря точки Р (фиг.1)
скорости ветра и с использованием значений ГШр, ГДр, Нр, Дтр, Нк, Кшт, Сн, Ар, Ер, U, Fв и зависимости R(H) вычисляют на ЛА потребные значения географических широты ГШс и долготы ГДс, а также высоты Нст над уровнем моря точки С сброса АПК, потребные значения скорости Vст, углов курса Кст и тангажа Тст полета ЛА при сбросе АПК (фиг.1) и времени Трт задержки срабатывания ВЗ АПК после сброса АПК с ЛА. Для этого вначале вычисляют значение Нрм высоты над уровнем моря точки Р (фиг.1)
Нрм=Нр+Нк (3)
Задают S совокупностей значений высоты Hci, скорости Vci и угла тангажа Tci (i=1, 2, ..., S) полета ЛА в точке С. Численным интегрированием известной системы дифференциальных уравнений движения центра массы АПК при заданных начальных условиях Hci, Vci, Tci вычисляют соответствующие значения Tpi (Hci, Vci, Tci) времени полета АПК от точки его сброса до достижения заданной высоты Нр и Аштi (Нсi, Vci, Tci) штилевого относа (А.Г.Постников, В.С.Чуйко. Внешняя баллистика неуправляемых авиационных ракет и снарядов. - М.: Машиностроение, 1985). По точкам с координатами Tpi, Hci, Vci, Tci и Aштi, Hci, Vci, Tci определяют зависимости
Тр(Нс, Vc, Тс), Ашт(Нс, Vc, Тc). (4)
Затем вычисляют значения Цпi
ЦПi=U·Tpi (i=-1, 2, ..., n). (5)
Из начала системы координат ЦХУ проводят прямую линию ЦГ (фиг.2), параллельную вектору  , и на этой прямой в направлении, противоположном направлению вектора
, и на этой прямой в направлении, противоположном направлению вектора  , откладывают отрезки длиной ЦПi. Из точек Пi под заданным углом Кшт к прямой СМ проводят лучи и на каждом луче откладывают соответствующий отрезок ПiСi длиной Аштi. Точки Ci (i=1, 2, ..., n) этих отрезков соединяют плавной кривой линией С1С2 ... Ci ... Сn, и из точки С пересечения этой кривой с дугой АВ (фиг.2) под углом Кшт к прямой СМ проводят прямую линию до пересечения ее с прямой ЦГ в точке П. Определяют значения длины Lп и Lc соответственно отрезков ЦП и ПС (фиг.2). С учетом (5) вычисляют значение Трт времени полета контейнера от точки С до точки Р
, откладывают отрезки длиной ЦПi. Из точек Пi под заданным углом Кшт к прямой СМ проводят лучи и на каждом луче откладывают соответствующий отрезок ПiСi длиной Аштi. Точки Ci (i=1, 2, ..., n) этих отрезков соединяют плавной кривой линией С1С2 ... Ci ... Сn, и из точки С пересечения этой кривой с дугой АВ (фиг.2) под углом Кшт к прямой СМ проводят прямую линию до пересечения ее с прямой ЦГ в точке П. Определяют значения длины Lп и Lc соответственно отрезков ЦП и ПС (фиг.2). С учетом (5) вычисляют значение Трт времени полета контейнера от точки С до точки Р
Трт=Lп/U. (6)
Из решения треугольников ЦПС и ЦСХс (фиг.2) с использованием зависимостей (4) и полученного значения Трт (6) вычисляют значения Нcт, Vст и Тст, а также угол Кcт курса ЛА в точке С и координаты Хс, Yc этой точки в системе координат ЦХY. Затем по известному алгоритму (см. В.Г.Григорьев, Д.В.Григорьев, В.В.Григорьев. Способ дистанционного определения координат местоположения наземного объекта - Патент РФ, 2001) вычисляют значения географических широты ГШс и долготы ГДс точки С
ГШс=ГШр+dГШс, (7)
ГДс=ГДр+dГДс, (8)
где
dГШс=Yc/Rз(ГШс), (9)
dГДс=Хс/(Rз(ГШс)·cos(ГШр)), (10)

Ар, Ер - большая полуось и эксцентриситет референц-эллипсоида Земли соответственно.
Значение Трт вводят в СИВЗ и управляют полетом ЛА так, чтобы при выходе ЛА в точку С с координатами ГШс, ГДс, Нст параметры полета ЛА были равны значениям Кcт, Vct, Тст. За 5 мин до выхода ЛА в точку С включают в работу СЭП каждого БЛА, находящегося в АПК, и в точке С сбрасывают АПК с ЛА. Через время Трт после сброса АПК с ЛА инициируют срабатывание ВЗ, действием продуктов срабатывания ВЗ отбрасывают назад заднюю крышку АПК, раскрывают ВП каждого БЛА, который притормаживает этот БЛА, а затем раскрывают ОП этого БЛА, который обеспечивает необходимую скорость снижения БЛА. После этого на каждом БЛАj (j=1, 2,..., N; N - количество БЛА, установленных в АПК) включают в работу каждый ДРИjq (q=1, 2,..., Nj; Nj - количество ДРИ, установленных на БЛАj), СИКТj, ПсCOMj, РПрj. С помощью ДРИiq получают соответствующее излучение от НО и земной поверхности (ЗП), находящихся в его поле зрения, и преобразуют это излучение в соответствующий электрический сигнал

где x, у - координаты (в связанной системе координат Z’X’Y (фиг.3в)) того участка участка НО или ЗП, от которого приходит излучение на ДРИ; Ti - моменты времени, в которые получают сигнал Uqj. Одновременно на каждом БЛАj с помощью ПССОМj определяют значения географических широты ГШj(Тi), долготы ГДj(Тi) и высоты Нj(Тi) над уровнем моря местоположения этого БЛАj, а с помощью СИКТj измеряют значения Fкj (Ti) угла крена и Fтj(Ti) угла тангажа этого БЛАj. Значения Uqj (x,y,Ti), ГШj(Тi), ГДj(Тi), Hj(Ti), Fкj(Ti), Fтj(Ti) подают в РПрj этого БЛАj. С помощью РПрj каждого БЛА передают значения Uqj(x,y,Ti), ГШj(Тi), ГДj(Тi), Hj(Ti), Fкj(Ti), Fтj(Ti) на НП и на ЛА. На НП с использованием РПн и на ЛА с использованием РПн принимают эти значения Uqj(x,y,Ti), ГШj(Тi), ГДj(Тi), Hj(Ti), Fкj(Ti), Fтj(Ti) от каждого БЛАj и запоминают их в Вн и Вл. Затем в Вн и Вл сигналы Uqj(x,y,Ti) в системе координат Z’X’Y’ пересчитывают в сигналы Uqj(x,y,Ti) в системе координат Z’XY (фиг.3в) с использованием соответствующих значений Fкj(Ti), после чего сигналы Uqj(x,y,Ti) с использованием АОн и АОл преобразуют в видимые изображения (BOqj(Ti)) НО и ЗП, находящихся в поле зрения всех ДРИqj, установленных на всех БЛА. Анализируя эти BOqj(Ti), на НП и на ЛА обнаруживают те HOqj, которые обладают контрастом для ДРИqj. После этого определяют координаты обнаруженных HOqj. Для этого измеряют соответствующие моменту времени Ti координаты Loxэ(Ti), Lоуэ(Тi) точки Оэ местоположения обнаруженного HOqj на экране АОн (АОл) в системе координат ZэХэYэ и вычисляют значения Loxэ(Ti), Loyэ(Ti) координат этой точки в повернутой на угол Fк(Ti) системе координат ZэХэYэ (фиг.3г) (далее для согласования с фиг.3 индекс "j" при Fк и Fт опущен)

Из анализа схем (фиг.3а и фиг.3в) следует, что
Lox(Ti)=Hj(Ti)·(tg(Fт(Ti)+Fox(Ti))-tgFт(Тi)), (14)
и

где значение Fox(Ti) пока неизвестно. Из сопоставления схем, показанных на фиг.3в и фиг.3г, следует, что

Тогда из (15) с учетом (16) получим

где

Аналогично из анализа схем фиг.3б, в, г получим

где

После определения координат Lox(Ti), Loy(Ti) местоположения HOqj относительно БЛА в системе координат Z’X’Y’, вычисляют значения Lox(Ti), Loy(Ti) координат HOqj относительно БЛА в системе координат Z’XY

Значения географических широты ГШоqj(Ti) и долготы ГДоqj(Ti) обнаруженного HOqj, которые соответствуют моменту времени Ti, определяются алгоритмом, аналогичным алгоритму (7)-(11),


где

Таким образом, в предлагаемом способе на НП и на ЛА принимают сигналы Uqj (12), которые одновременно получены с помощью ДРИqj различных типов, получают BOqj, соответствующие сигналам Uqj, обнаруживают HOqj на этих BOqj, опознают как НО определенного класса и определяют значения ГШoqj (22) и ГДoqj (23) этих HOqj. Истинные НО, как правило, обладают контрастом в нескольких областях спектра ЭМИ и АИ, а ложные НО (т.е. макеты истинных НО), обычно обладают контрастом в меньшем числе областей спектра ЭМИ и АИ. Поэтому чем больше количество обнаруженных HOqj, у которых значения ГШoqj (22) и ГДoqj (23) одинаковы, тем выше вероятность Ропи опознания их как истинных НО (ИНО), а не ложных НО (ЛНО), определенного класса.
Для оценки значения Ропи учтем, что каждый сигнал Uqj (12) содержит "портреты" ИНО и ЛНО, полученные в соответствующих диапазонах длин волн ЭМИ или АИ. С учетом состава ДРИ, установленных на трех БЛА в рассмотренном выше примере, на НП и на ЛА получают одновременно "ВППООД" (видимые "портреты" НО на фоне ЗП в оптическом диапазоне ЭМИ), "ВПИПО" (видимые "портреты" НО на фоне ЗП в инфракрасном диапазоне ЭМИ), "ВПРЛПО" (видимые "портреты" НО на фоне ЗП в радиолокационном диапазоне ЭМИ) и "ВПАПО" (видимые акустические "портреты" наземных объектов). Значения Ропив (1) для "ВППООД" и Ропии (2) для "ВПИПО" приведены выше при анализе недостатка прототипа. Характерными признаками "ВПРЛПО" НО, которые позволяют опознать этот НО, являются взаимное расположение на НО точек, отражающих радиолокационное излучение (РИ) и интенсивности отраженного РИ от этих точек. Поэтому, если расположить на макете НО соответствующим образом несколько отражателей РИ, имеющих соответствующую площадь и направленность, то можно создать ЛНО, "ВПРЛПО" которого будет в значительной мере похож на "ВПРЛПО" соответствующего ИНО. Однако, так как "ВПРЛПО" ИНО сложнее, чем его "ВПИПО", то при использовании на БЛА радиолокационного ДРИ вероятность Ропи, которую в этом случае обозначим Ропир, можно оценить значением

При получении сигналов Uqj (12) телевизионного ДРИ, инфракрасного ДРИ и радиолокационного ДРИ, одновременно работающих на соответствующих БЛА, как это имеет место в рассмотренном выше примере, на НП (и на ЛА) при анализе Uqj (12) и соответствующих им BOqj одновременно сравнивают "ВППООД", "ВПИПО" и "ВПРЛПО" обнаруженных НО с известными "ВППООД", "ВПИПО" и "ВПРЛПО" ИНО соответствующих классов. При этом, как известно из теории вероятностей, значение Ропи вероятности опознания обнаруженного НО как ИНО соответствующего класса с учетом (1), (2), (25) определяется выражением

Подставив в (26) значения (1), (2), (25), получим для вероятности Ропи следующие максимальное Ропиmах и минимальное Ропиmin значения
Ропиmax=1-0,5·0,4·0,3=0,94
Ропиmin=1-(1-0,5)3=0,875.
Если также учесть работу трех АДРИ, которые в рассмотренном ранее примере установлены на БЛА, то при условии получения сигналов от АДРИ выражение для Ропи примет вид

где Ропиа1, Ропиа2, Ропиа3 - вероятность опознания обнаруженного НО как ИНО соответствующего класса при использовании информации от АДРИ1, АДРИ2 и АДРИ3 соответственно. Допустим, что идентичны акустические портреты ИНО и ДНО соответствующих классов, полученные в диапазонах частот АИ, в которых работают АДРИ1, АДРИ2 и АДРИ3. Тогда
Ропиа1=Ропиа2=Ропиа3=0,5.
Подставив эти значения, а также значения (1), (2), (25) в (27), получим
Ропиmax=1-(1-0,5)4·(1-0,6)·(1-0,7)=0,9925
и
Ропиmin=1-(1-0,5)6=0,984375.
Проведенные расчеты показывают, что использование предлагаемого способа обеспечивает, по сравнению с прототипом, существенное увеличение значения вероятности Ропи опознания обнаруженного в процессе воздушной разведки НО как истинного НО соответствующего класса, а не ложного НО, чем и достигается цель изобретения.
В состав возможного варианта устройства, реализующего предложенный способ, входят (фиг.3): АПК 1, БЛА 2, БЛА 3, БЛА 4, ВЗ 5, СИВЗ 6. Ла 7, Вл 8, Вн 9, СЭП -10, СИКТ 11, ПССОМ 12, ДРИ 13, ДРИ 14, РПр 15, ВП 16, ОП 17, Нп 18, РПл 19, РПн 20, АОл 21 и АОл 22, причем вход СЭП БЛА 2, вход СЭП БЛА 3 и вход СЭП 10 БЛА 4 соединены со вторым выходом Вл 8, вход СИВЗ 6 соединен с первым выходом Вл 8, выход СЭП 10 соединен с входами СИКТ 11, ПССОМ 12, ДРИ 13, ДРИ 14 и с четвертым входом РПр 15, выход СИКТ 11 соединен с первым входом РПр 15, выход ПССОМ 12 соединен со вторым входом РПр 15, выход ДРИ 13 соединен с третьим входом РПр 15, выход ДРИ 14 соединен с пятым входом РПр 15, первый выход РПн 20 соединен с первым входом Вн 9, второй выход РПн 20 соединен с входом АОн 22, второй вход Вн 9 соединен с выходом устройства предварительного ввода информации, первый выход РПл 19 соединен с первым входом Вл 8, второй выход РПл 19 соединен с входом АОл 21, второй вход Вл 8 соединен с выходом устройства измерения ветра, а третий вход Вл 8 соединен с выходом устройства предварительного ввода информации.
Работает устройство следующим образом. Предварительно в АПК 1 устанавливают БЛА 2, БЛА 3, БЛА 4, ВЗ 5, СИВЗ 6 и устанавливают АПК 1 на ЛА 7. Также предварительно с выхода устройства предварительного ввода информации в Вл 8 вводят заданные значения ГШр, ГДр, Нр, Нк, Дтр, Кшт, Ар, Ер, Сн, Fxjq, Fyjq и зависимость R(H), а в Вн 9 вводят заданные значения Ар, Ер, Fxjq и Fyjq. В процессе полета ЛА 7 на нем с помощью штатной бортовой аппаратуры определяют модуль U и угол Fв ориентации вектора U скорости ветра и с использованием предварительно введенной информации в Вл 8 по алгоритму (3), ..., (11) вычисляют потребные значения географической широты ГШс, географической долготы ГДс и высоты Нcт над уровнем моря точки С сброса АПК 1 с ЛА 7, потребные значения скорости Vcт, углов курса Кcт и тангажа Тcт полета ЛА 7 при сбросе с него АПК 1 и времени Трт задержки срабатывания ВЗ 5 после сброса АПК 1 с ЛА 7. Полученное значение Трт с Вл 8 подают в СИВЗ 6.
Затем управляют полетом ЛА 7 так, чтобы ЛА 7 вышел в точку С с координатами ГШс, ГДс, Нcт, имея параметры полета Кcт, Vcт, Тст. За 5 мин до выхода ЛА 7 в точку С по сигналу с Вл 8 включают в работу СЭП 10 каждого БЛА, т.е. БЛА 2, БЛА 3 и БЛА 4. С выхода СЭП 10 каждого БЛА электрическое питание поступает на СИКТ 11, ПССОМ 12, ДРИ 13, ДРИ 14 и РПр 15 каждого БЛА. В точке С сбрасывают АПК 1 с ЛА 7. Через время Трт после сброса АПК 1 с помощью СИВЗ 6 срабатывает ВЗ 5. В результате действием продуктов срабатывания ВЗ 5 отбрасывается назад задняя крышку АПК 1, раскрывается ВП 16 каждого БЛА. ВП 16 притормаживает БЛА и раскрывает ОП 17 этого БЛА. ОП 17 обеспечивает необходимую скорость снижения этого БЛА. После этого на каждом БЛА включаются в работу СИКТ 11, ПССОМ 12, ДРИ 13, ДРИ 14 и РПр 15. С помощью ДРИ 13 и ДРИ 14 получают соответствующее излучение от НО и ЗП, находящихся в зоне его действия, преобразуют это излучение в соответствующий электрический сигнал U1 (в ДРИ 13) и U2 (в ДРИ 14) и с выходов этих ДРИ подают U1, U2 на соответствующие входы РПр 15 этого БЛА.
Одновременно на каждом БЛА с помощью ПССОМ 12 определяют значения географических широты ГШ, долготы ГД и высоты Н над уровнем моря местоположения этого БЛА и подают эти значения на соответствующий вход РПр 15 этого БЛА. С помощью СИКТ 11 измеряют значения Fк и Fт углов крена и тангажа этого БЛА и подают эти значения на соответствующий вход РПр 15 этого БЛА. С помощью РПр 15 каждого БЛА передают U1, U2 и значения ГШ, ГД, Н, Fк Fт на НП 18 и на ЛА 7. На ЛА 7 с использованием РПл 19 и на НП 18 с использованием РПн 20 принимают от БЛА U1, U2 и значения ГШ, ГД, Н, Fк, Fт и запоминают их в Вл 8 и Вн 9. В Вл 8 и Вн 9 сигналы U1 и U2, полученные в системе координат Z’X’Y’, пересчитывают в соответствующие сигналы в системе координат Z’XY (фиг.3в) с использованием значений Fк, после чего пересчитанные сигналы с использованием АОл 21 и АОн 22 преобразуют в видимые изображения ВО НО и ЗП, находящихся в поле зрения всех ДРИ, установленных на всех БЛА. Анализируя эти ВО НО и ЗП, на НП 18 и на ЛА 7 обнаруживают и опознают интересующие НО, после чего измеряют координаты Loxэ, Loyэ местоположения обнаруженных и опознанных НО на экране АОл 21 (АОн 22). Затем на ЛА 7 и на НП 18 по алгоритму (13) вычисляют значения координат этих НО в повернутой на угол Fк системе координат, и по алгоритму (14), ..., (24) вычисляют значения географических широты ГШно и долготы ГДно обнаруженных и опознанных НО.
Источники информации
1. Ежемесячный информационный бюллетень "Иностранная печать об экономическом, научно-техническом и военном потенциале государств - участников СНГ и технических средствах его выявления". Серия "Технические средства разведывательных служб капиталистических государств". - М.: ВИНИТИ, 1998, № 3, с.14-22.
2. Ежемесячный информационный бюллетень "Иностранная печать об экономическом, научно-техническом и военном потенциале государств - участников СНГ и технических средствах его выявления". Серия "Технические средства разведывательных служб капиталистических государств". - М.: ВИНИТИ, 2002, № 8, с.17-19.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СКОРОСТНОЙ ВОЗДУШНОЙ РАЗВЕДКИ | 2009 |
|
RU2395782C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ БОМБОМЕТАНИИ | 2001 |
|
RU2204106C2 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЦЕЛЬ | 2001 |
|
RU2204785C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2240588C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА | 2001 |
|
RU2206112C1 |
| СПОСОБ РАДИООБМЕНА ИНФОРМАЦИЕЙ | 2000 |
|
RU2197065C2 |
| СПОСОБ ЦЕЛЕУКАЗАНИЯ ПО НАПРАВЛЕНИЮ СИСТЕМЕ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117902C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА НА ЦЕЛЬ | 1997 |
|
RU2117312C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2208555C2 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ОБЪЕКТА | 2000 |
|
RU2182713C2 |
Изобретение относится к способам воздушной разведки наземных объектов. Сущность изобретения заключается в том, что используют авиационный пусковой контейнер, предварительно установленный на летательный аппарат (ЛА). В авиационный пусковой контейнер устанавливают не менее двух беспилотных летательных аппаратов (БЛА). В полезной нагрузке каждого БЛА устанавливают не менее двух датчиков разведывательной информации. После сброса контейнера с помощью вышибного заряда раскрывают авиационный пусковой контейнер и с помощью вытяжного парашюта извлекают каждый БЛА из контейнера, при этом определяют координаты его местоположения, измеряют углы крена и тангажа, на выходе каждого датчика разведывательной информации получают соответствующее отображение наземного объекта и земной поверхности. Данные передают на ЛА и наземный пункт, где формируют их видимые отображения. Технический результат изобретения состоит в увеличении значения вероятности опознания обнаруженных в процессе воздушной разведки наземных объектов как истинных, а не ложных. 4 ил.
Способ воздушной разведки наземных объектов, при котором на беспилотный летательный аппарат (БЛА) устанавливают полезную нагрузку, радиопередатчик, приемник глобальной спутниковой системы определения его местоположения, систему измерения углов крена и тангажа, систему электропитания и парашютную систему, затем в пусковой контейнер устанавливают БЛА, вышибной заряд и систему его инициирования, после пуска указанного контейнера инициируют срабатывание вышибного заряда, выбрасывают БЛА из контейнера назад, раскрывают парашютную систему, с помощью которой притормаживают БЛА, после чего включают в работу полезную нагрузку, систему измерения углов крена и тангажа, приемник глобальной спутниковой системы определения местоположения и радиопередатчик, в районе разведки с помощью полезной нагрузки получают на БЛА отображение наземных объектов на фоне земной поверхности в соответствующем диапазоне длин волн электромагнитного излучения и электрические сигналы, соответствующие этому отображению, определяют значения координат местоположения БЛА и измеряют значения Fк и Fт его углов крена и тангажа, с помощью радиопередатчика передают указанные электрические сигналы, значения координат местоположения, Fк и Fт на наземный пункт, где их принимают, формируют видимое изображение наземных объектов на фоне земной поверхности, соответствующее принятым электрическим сигналам, на видимом изображении обнаруживают наземные объекты и опознают их как объекты определенного класса и с использованием видимого изображения, значений координат местоположения, Fк и Fт вычисляют значения координат местоположения этих объектов, отличающийся тем, что используют авиационный пусковой контейнер, который предварительно устанавливают на летательный аппарат, при этом в указанный контейнер устанавливают не менее двух БЛА, в полезной нагрузке каждого из которых устанавливают не менее двух датчиков разведывательной информации, выполненных с возможностью обнаружения электромагнитного излучения в оптическом, инфракрасном или радиолокационном диапазоне длин волн или акустического излучения в соответствующем диапазоне длин волн, причем в полезной нагрузке всех БЛА устанавливают не менее одного датчика разведывательной информации указанных диапазонов длин волн электромагнитного или акустического излучения, парашютную систему каждого беспилотного летательного аппарата составляют из вытяжного и основного парашютов, в вычислитель летательного аппарата предварительно вводят заданные значения географической широты ГШр, географической долготы ГДр и высоты Нр над уровнем моря центра района разведки, горизонтальной дальности Дтр между точкой сброса этого контейнера с летательного аппарата и этим центром, высоты Нк над этим центром момента срабатывания вышибного заряда, курса Кшт полета летательного аппарата в момент сброса этого контейнера без учета ветра, большой полуоси Ар и эксцентриситета Ер референц-эллипсоида Земли, углов Fx и Fy поля зрения каждого датчика разведывательной информации в двух взаимно перпендикулярных плоскостях, баллистического коэффициента Сн этого контейнера и зависимость R(H) плотности R воздуха от высоты Н, в вычислитель наземного пункта предварительно вводят значения Ар, Ер, Fx и Fy, а на летательном аппарате в процессе полета определяют вектор скорости ветра и с использованием значений ГШр, ГДр, Нр, Дтр, Нк, Кшт, Сн, в зависимости от R(H) и вектора скорости ветра вычисляют требуемые значения географической широты ГШс, географической долготы ГДс и высоты Нст точки С сброса этого контейнера с летательного аппарата, а также требуемые значения скорости Vст, углов курса Кст и тангажа Тст летательного аппарата в точке С и времени Трт инициирования вышибного заряда, после сброса этого контейнера, вводят значение Трт в систему инициирования вышибного заряда, управляют полетом летательного аппарата так, чтобы вывести его в точку С с параметрами полета Нст, Vст, Кст и Тст, в точке С сбрасывают авиационный пусковой контейнер с летательного аппарата, после чего через время Трт инициируют срабатывание вышибного заряда, с помощью которого отбрасывают назад заднюю крышку указанного контейнера, раскрывают вытяжной парашют каждого БЛА, с помощью которого извлекают его из контейнера, и раскрывают основной парашют, в процессе снижения каждого БЛА на основном парашюте электрические сигналы с выхода полезной нагрузки, значения его Fк и Fт и координат местоположения передают на летательный аппарат, где их принимают, после чего на летательном аппарате и на наземном пункте формируют видимые изображения наземных объектов на фоне земной поверхности, соответствующие электрическим сигналам, полученным от каждого датчика разведывательной информации, обнаруживают наземные объекты на каждом из этих видимых изображений, с использованием этих видимых изображений, соответствующих значений Fк и Fт и координат местоположения соответствующих БЛА вычисляют значения координат местоположения всех обнаруженных на этих видимых изображениях наземных объектов в единой для всех БЛА и всех датчиков разведывательной информации системе координат и опознают как истинные наземные объекты определенного класса, а не ложные, те из обнаруженных наземных объектов, для которых одинаковы значения координат их местоположения, полученные с использованием не менее чем двух этих видимых изображений.
| Ежемесячный информационный бюллетень “Иностранная печать об экономическом, научно-техническом и военном потенциале государств - участников СНГ и технических средствах его выявления”, серия “Технические средства разведывательных служб зарубежных государств”, 2002, № 8, с.17-19 | |||
| КОМПЛЕКС ДЛЯ ОБЕСПЕЧЕНИЯ БОЕВЫХ ДЕЙСТВИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1997 |
|
RU2132798C1 |
| Способ возведения фундамента круглого в плане резервуара | 1987 |
|
SU1434034A1 |
| US 4286760, 01.09.1981 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ РЕАКЦИИ СЕРДЕЧНО-СОСУДИСТОЙ СИСТЕМЫ НА ФИЗИЧЕСКУЮ НАГРУЗКУ | 2002 |
|
RU2231284C2 |
| DE 3340625 A1, 30.05.1985. | |||

