Предлагаемое техническое решение относится к подъемно-транспортному машиностроению, а именно к устройствам, предназначенным контролировать натяжение грузового каната грузоподъемного механизма.
Известно устройство для измерения усилия натяжения грузового каната грузоподъемного механизма, содержащее основание, на котором расположены датчик усилий и рычаг, который одним плечом взаимодействует с датчиком усилий, а другим - с грузовым канатом (А.С. СССР №450772, МПК В66С 23/88, 1974 г.).
Это устройство предназначено для работы в ветви грузового каната, сходящей на барабан лебедки грузоподъемного механизма. Однако при подъеме или опускании груза на барабане лебедки изменяется количество слоев грузового каната, за счет этого увеличивается или уменьшается угол сбега указанной ветви грузового каната с блока, связанного с соответствующим плечом рычага известного устройства. А изменение угла сбега приводит к изменению длины плеча силы от ветви воздействия грузового каната относительно опоры рычага. Это приводит к нарушению соотношения длин плечей рычага и, следовательно, к изменению величины силы, действующей на датчик усилия, вне зависимости от действительного натяжения грузового каната, т.е. возникает погрешность измерения усилия натяжения грузового каната. Это может создать аварийную ситуацию при работе грузоподъемного механизма.
Известно устройство для измерения усилия натяжения грузового каната грузоподъемного механизма, которое является наиболее близким к предлагаемому техническому решению по существенным признакам и достигаемому результату, содержащее основание, на котором расположены датчик усилий и рычаг, опора которого шарнирно связана с основанием, при этом одно его плечо связано с грузовым канатом, а другое выполнено с возможностью взаимодействия с датчиком усилий («Краны-трубоукладчики ТР20, ТР12», Руководство по эксплуатации 71-3РЭ, Челябинск, 2005 г., стр.25. Копия прилагается. См. приложение 1, 2).
Такое устройство работает в заякоренной ветви грузового каната грузоподъемного механизма. Однако в процессе подъема или опускания груза в этом устройстве также происходит отклонение грузового каната относительно устройства для измерения усилия натяжения грузового каната, изменяющее длину плеча рычага, связанного с грузовым канатом. Это приводит к нарушению соотношению длин плечей рычага. В результате величина силы, действующей на датчик усилия, меняется вне зависимости от действительного натяжения грузового каната. Кроме этого, в конструкции этого устройства предусмотрена установка опоры рычага непосредственно на ось основания с образованием подшипника скольжения, который обладает высоким и нестабильным моментом трения. Из-за этих факторов проявляются погрешности измерения усилия натяжения грузового каната. Таким образом, известное устройство для измерения усилия натяжения грузового каната также не гарантирует безаварийную работу грузоподъемного механизма.
Задача, которую решают авторы, является создание устройства, обеспечивающего высокую точность измерения усилия натяжения грузового каната и, следовательно, гарантирующего безаварийную работу грузоподъемного механизма.
Для решения этой задачи в устройстве для измерения усилия натяжения грузового каната грузоподъемного механизма, содержащем основание, на котором расположены датчик усилий и рычаг, опора которого шарнирно связана с основанием, при этом одно его плечо связано с грузовым канатом, а другое выполнено с возможностью взаимодействия с датчиком усилий, авторы предлагают плечо рычага, связанное с грузовым канатом, дополнительно снабдить упором, расположенным и выполненным с возможностью взаимодействия своей торцевой поверхности с грузовым канатом, при этом указанную торцевую поверхность выполнить изогнутой с постоянным радиусом кривизны, равным расстоянию от нее до оси опоры рычага.
Кроме этого, авторы предлагают опору рычага снабдить подшипником качения.
Предлагаемое устройство, в котором на плече рычага, связанного с грузовым канатом, выполнен упор с торцевой поверхностью изогнутой формы с постоянным радиусом кривизны, равным расстоянию от нее до оси опоры рычага, позволяет постоянно удерживать взаимодействующую ветвь грузового каната относительно опоры рычага на постоянном расстоянии, т.е. сохранять постоянной длина плеча силы от воздействия грузового каната на рычаг. В результате при подъеме или опускании груза обеспечивается постоянное соотношение длин плечей рычага. Следовательно, величина силы, действующей на датчик усилия, меняется только в зависимости от действительного натяжения грузового каната. Таким образом, предлагаемое устройство обеспечивает точность измерения усилия натяжения грузового каната и гарантирует безаварийную работу грузоподъемного механизма.
При проведении поиска по патентной и научно-технической литературе не выявлено технических решений, содержащих предлагаемую совокупность существенных признаков, что позволяет сделать вывод о соответствии предлагаемого технического решения критерию «новизна».
Анализ известных устройств измерения усилия натяжения грузового каната грузоподъемного механизма показал, что предлагаемая авторами совокупность существенных признаков, позволяющая повысить точность измерения натяжения грузового каната и тем самым обеспечить безаварийную работу грузоподъемного механизма, не является очевидной для специалистов. Следовательно, заявляемое техническое решение соответствует критерию «изобретательский уровень».
Промышленная применимость заявляемого технического решения видна из описания конструкции устройства для измерения усилия натяжения грузового каната грузоподъемного механизма.
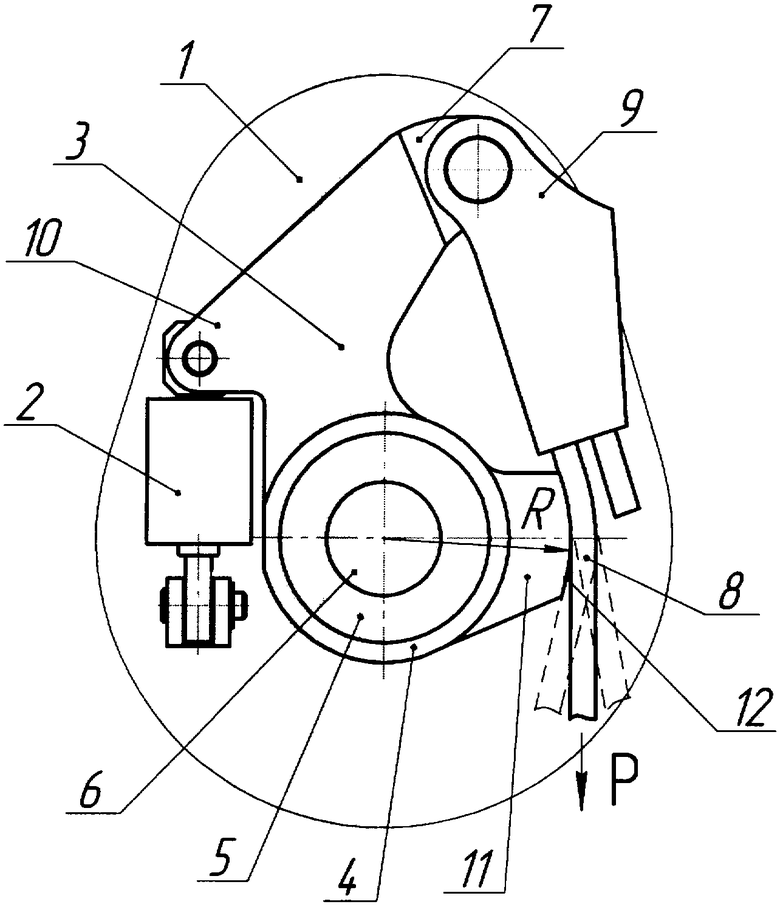
На чертеже изображено предлагаемое устройство для измерения усилия натяжения грузового каната грузоподъемного механизма.
Устройство для измерения усилия натяжения грузового каната грузоподъемного механизма содержит основание 1, на котором расположены датчик усилий 2 и рычаг 3. Опора 4 рычага 3 снабжена подшипником качения 5 и шарнирно связана с основанием 1 посредством оси 6. Плечо 7 рычага 3 шарнирно связано с грузовым канатом 8 с помощью клиновой втулки 9, а плечо 10 выполнено с возможностью взаимодействия с датчиком усилий 2. На плече 7 рычага 3 выполнен упор 11 с возможностью контакта своей торцевой поверхности 12 с грузовым канатом 8.
Торцевая поверхность 12 упора 11 выполнена изогнутой с постоянным радиусом кривизны R, равным расстоянию от нее до оси опоры рычага.
Предлагаемое устройство установлено в заякоренной ветви грузового каната и работает следующим образом.
При работе грузоподъемного механизма грузовой канат 8 находится в постоянном контакте с торцевой поверхностью 12 упора 11. Выполнение упора 11 с торцевой поверхностью 12 изогнутой формы с постоянным радиусом кривизны R сохраняет длину плеча, равную расстоянию от торцевой поверхности 12 до оси 6 опоры рычага 3, при отклонении грузового каната 8 в процессе подъема или опускания груза. От воздействия грузового каната 8 на торцевую поверхность 12 упора 11 его усилие натяжения Р передается через плечо 10 рычага 3 на датчик усилий 2. Предельное усилие, которое воспринимается датчиком 2, определяется конструктивно с учетом максимальной величины натяжения грузового каната 8, номинального усилия датчика 2 и зависит только от действительного натяжения грузового каната 8. Сигнал от датчика усилий 2 подается на контрольное устройство (на чертеже не показано), которое позволяет остановить работу грузоподъемного механизма при достижении предельно допустимого значения натяжения грузового каната 8. Установка на опоре 4 подшипника качения 5 обеспечивает низкий и стабильный момент трения в этом узле и повышает точность измерения.
Предлагаемое устройство для измерения усилия натяжения грузового каната грузоподъемного механизма обеспечивает высокую точность измерения усилия натяжения и гарантирует безаварийную работу грузоподъемного механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2381985C1 |
| Ограничитель грузоподъемности крана | 1989 |
|
SU1768493A1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2091723C1 |
| Грузоподъемный кран | 1980 |
|
SU931681A2 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| Строительный подъемник | 1981 |
|
SU977350A1 |
| СИСТЕМА ПЕРЕДАЧИ ТЕКУЧЕЙ СРЕДЫ ПОСРЕДСТВОМ ПОДВЕШЕННОГО ТРУБОПРОВОДА | 2000 |
|
RU2246443C2 |
| БЕЗОПАСНЫЙ КАНАТНЫЙ ПОЛИСПАСТ | 2004 |
|
RU2266860C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСИЛИЯ НАТЯЖЕНИЯ ГРУЗОВОГО КАНАТА ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА | 2005 |
|
RU2287478C1 |
Изобретение относится к подъемно-транспортному машиностроению, а именно к устройствам, предназначенным контролировать натяжение грузового каната грузоподъемного механизма. Устройство для измерения усилия натяжения грузового каната грузоподъемного механизма содержит основание, на котором расположены датчик усилий и рычаг. Опора рычага снабжена подшипником качения и шарнирно связана с основанием посредством оси. Плечо рычага шарнирно связано с грузовым канатом с помощью клиновой втулки, а плечо выполнено с возможностью взаимодействия с датчиком усилий. На плече рычага выполнен упор с возможностью контакта своей торцевой поверхности с грузовым канатом. Торцевая поверхность упора выполнена изогнутой с постоянным радиусом кривизны R, равным расстоянию от нее до оси опоры рычага. Обеспечивается высокая точность измерения усилия натяжения и гарантия безаварийной работы грузоподъемного механизма. 1 з.п. ф-лы, 1 ил.
1. Устройство для измерения усилия натяжения грузового каната грузоподъемного механизма, содержащее основание, на котором расположены датчик усилий и рычаг, опора которого шарнирно связана с основанием, при этом одно его плечо связано с грузовым канатом, а другое выполнено с возможностью взаимодействия с датчиком усилий, отличающееся тем, что плечо рычага, связанное с грузовым канатом, дополнительно снабжено упором, расположенным и выполненным с возможностью взаимодействия своей торцевой поверхности с грузовым канатом, при этом указанная торцевая поверхность выполнена изогнутой с постоянным радиусом кривизны, равным расстоянию от указанной торцевой поверхности до оси опоры рычага.
2. Устройство по п.1, отличающееся тем, что опора рычага снабжена подшипником качения.
| JP 2003306292 А, 28.10.2003 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСИЛИЯ НАТЯЖЕНИЯ ГРУЗОВОГО КАНАТА ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА | 2005 |
|
RU2287478C1 |
| JP 11199179 A, 27.07.1999. | |||

