Изобретение относится к строительным и монтажным работам,, а именно к канатным строительным подъемникам, предназначенным для подачи строительных материалов и оборудования в проемы зданий, Подъемник может быть использован как на строящихся объектах, так и при их ремонте.
Известен строительный подъемник, содержащий устанавливаемую на кровле здания , соединенную посредством трособлочной системы с лебедкой, установленной у основания здания, при этом трособлочная система имеет грузонесущее устройство и выполнена с внутренней и внешней ветвями замкнутого каната Cl.
Недостаток известного устройства заключается в его низкой надежности и значительных усилиях в канате.
Цель изобретения - -повышение надежности устройства и снижение усилий в канате.
Поставленная цель достигается тем, что грузонесущее устройство снабжено стойкой и грузовой емкостью, соединенными между собой при помощи шарнирных четырехзвенного и двухзвенных рычажных механизмов, расположенных на различных уровнях, при этом верхjiHH и нижние вершины четырехзвенного механизма соединены с внутренней ветвью замкнутого каната, а на стойке расположены блоки, огибаемые внешней ветвью каната, при этом нижние рычаги четырехзвенника выполнены с консоля 1и, которые связаны с одной стороны со стойкой, а с другой - с грузонесушей емкостью.
10
К стойке шарнирно прикреплен взаимодействующий с внешней ветвью каната подпружиненный кронштейн с упором, также взаимодействующим с указанной ветвью каната.
15
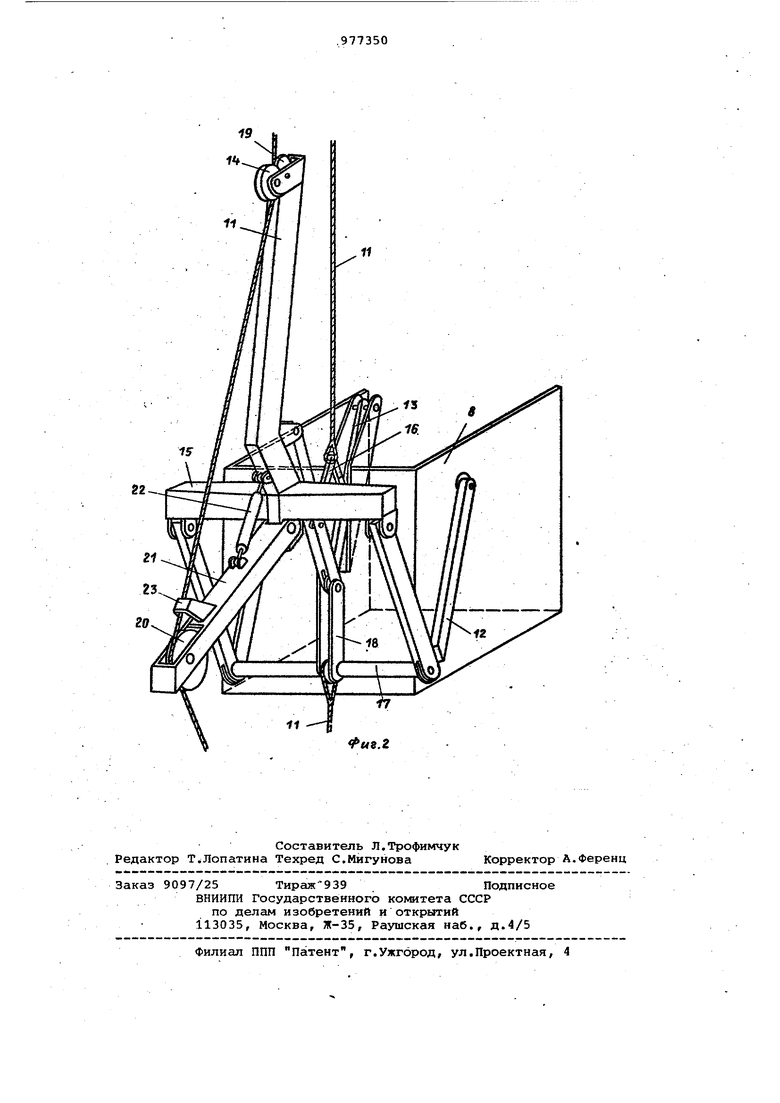
На фиг,1 изображена схема предлагаемого подъемника; на фиг.2 - конструкция грузонесущего устройства, изображенная в аксонометрии. /
Строительный подъемник содержит
20 лебедку 1, имеющую канатоведущие .шкивы трения и механизм для натяжения замкнутого каната, установленную на нижней приемной площадке 2, на которой расположены также направляющие
25 блоки 3 и 4, подпружиненяая опорная поверхность 5 с концевым выключателем двигателя, а также противовесы 6 для предотвргицения сдвига приемной пло- . щадки 2 от силы натяжения каната,
30 грузонесущее устройство 7 с емкостью 8 для размещения груза, верхний направляющий блок 9, установленный на блоке с контргрузом 10, которые расположены на 1фовле, замкнутый канат 11, который предназначен для подъема и опускания грузонесущего устройства 7, При помощи этого каната, а именно за счет его запасовки и изменения на Тяжения, осуществляется управление работой грузонесущего лстройства. Благодаря натяжению каната исключается раскачивание грузонесущего устройства при подъеме груза, а регулирование натяжения применяется для обеспечения равновесия грузонесущего .органа при подъеме груза и для подачи его в проем здания. Наиболее ответственной частью подъемника является грузонесущее устройство 7, особенность конструкци которого определяется прежде всего обеспечением горизонтальной подачи г)уза в проем здания при сохранении равновесия системы за счет использования натяжения замкнутого каната и. силы тяжести груза и устройства. Грузонесущее устройство состоит из емкости 8 для штучных или сыпучих грузов (в последнем случае целесообразно днище делать открывающимся), которая соединена при помощи двух пар шарнирных боковых рычагов 12 и одной пары центральных шарнирных рычагов 13 со стойкой 14, например Тобразной формы, имеющей соответствующие проушины на средней части стойк и на двух боковых кронштейнах 15. При этом соединение рычага 13 с емкостью 8 производится при помощи про ушины с внутренним пазом под рычаг 1 На центральных рычагах установлена пара малых рычагов 16, к которым присоединен замкнутый канат 11, Боко вые рычаги соединены между собой при .помощи тяги 17, а также с центральными рычагами - при помощи пластин 18. К пластинам присоединена внутрен няя ветвь замкнутого каната, идущая на лебедку. Таким образом, верхние большой 13 и малый 16 центральные рычаги образуют четырехзвенный механизм (параллелограмм), два звена которого выполнены с консолями, к которым приложена нагрузка от сил тяже ти. Для запасовки внешней ветви замкнутого каната, выполняющей в течение всего цикла работы подъемника роль направляющей, благодаря упругому отпору которой создается удержи. вающий против опрокидывания грузонесущего устройства момент, на стойке установлены направлякндие блоки 19 и. 20. Запасовка каната производится сле дукядим о.бразом. . На приводе лебедки канат укладыва ется несколькими витками на один из комплектов шкивов трения. В каждом комплекте по три шкива и число витков каната на них одинаково. Внутренняя (считая от здания) ветвь каната 11, сходя с лебедки, проходит через блок 4 и закрепляется своими концами на шарнирно-рычажном.механизме грузонесущего устройства 7. Далее канат последовательно огибает блок 9, направляющие блоки на грузонесущем устрой.стве 7, блок 3 и поступает на левый комплект шкивов трения. При этом блок 20 расположен на поворотном кронштейне 21, который соединен со стойкой 14 при помойш шарнира и пружины 22. Пружина 22 срабатывает при уменьшении натяжения в замкнутом канате, что имеет место при подаче груза в проем здания, и она предназначена для поворота кронштейна в верхнее положение, при котором увеличивается удерживающий момент от натяжения внешней ветви, за счет увеличения углов обхвата канатом блоков 19 и 20. На кронштейне 21 также установлен упор 23 с клинообразным желобом,предназначенный создания силы трения И.ЛИ для защемления каната при верхнем положении кронштейна 21, благодаря этому увеличивается удерживающий момент, а также может производиться выравнивание грузонесущего устройства или, наоборот, создание желательного наклона грузовой емкости в момент разгрузки при выносе емкости 8 в проем здания от движения замкнутого каната. Канатный строительный подъемник работает следующим образом. Перед началом работы лебедка 1 и приемная площадка 2 устанавливаются перед зданием с таким расчетом, чтобы ветви замкнутого каната 11 располагались вертикально, и на таком расстоянии от здания, чтобы исключить касание емкости 8 грузонесущего устройства 7 о стену. При загрузке емкости 8 она устанавливается на опорную поверхность 5 приемной площадки 2. После этого при помощи натяжного механизма лебедки, работающего на принципе регулирования числа витков на приводе, создается определенное натяжение в замкнутом канате, при котором обеспечивается .предельное складывание рычагов 13,16 и 12 грузонесущего устройства в направлении вертикальной оси. При этом расстояние между стойкой 14 и грузовой емкостью-8 минимально. Этим обеспечивается то что грузонесущее устройство при подъеме находится на безопасном расстоянии от стены здания. Далее при помощи канатоведущих шкивов лебедки и замкнутого каната осуществляется подъем грузонесущего устройства до требуемого уровня против проёма здания. При этом в начале подъема может быть выполнено выравнивание грузонесущего устройства в горизонтальное положение. Это делается путем регулирования натяжения замкнутого каната, при котором изменяется упругий отпор внешней ветви, запасованный в блоки 19, установленные на стойке 14 и на кронштейне 21. .От величины давления на эти блоки зависит величина удерживгиощего момента.
Например, в случае наклона емкости 8 вниз натяжение в замкнутом канате 11 следует увеличить. При этом кронштейн 21, преодолевая сопротивление пружины 22, займет нижнее положение до упора на стойке, повернувшись на угол Ы . В указанном положении углы обхвата канатом блоков 19 и 20 минимальны но удерживающий момент возрастает из-за увеличения давления каната-на эти блоки. Таким образом, для вертикального движения грузонесущего устройства необходимо так й зываемое монтажное натяжение замкнутого каната, при котором натянутые ветви выполняют роль натянутых струн, обеспечивающих равновесие устройст-ва и исключение его раскачивания и удары о стену здания. Расчеты показывают, что необходимое для равновесия монтажное натяжение сравнительно невелико и поимеоно оавно полуторной грузоподъемности подъемника
При горизонтальном выносе груза в проем здания натяжение в згьмкнутом канате сбрасывается до величины, обеспечивающей силу сдепления каната на приводе лебедки, и грузонесущее устройство оказывается подвешенным только к верхней вершине параллелограмма, образованного рычагами 16 и 13. Благодаря приложению нагрузки к концам рычагов 13 параллелограмм под действием сил тяжести складывается о носительно горизонтальной оси, при этом емкость 8 перемещается горизонтально от стойки на величийу, примерно равную длине рычагов 12 и 13.
Следует указать, что при снятии монтажного натяжения внешняя ветвь замкнутого каната 11 остается натянутой силой тяжести грузонесущего устройства и груза, что способствует поперечному перемещению грузонесущего устройства в целом в направлении проема, создавая дополнительней эффект.
Благодаря соединению емкости 8 со стойкой 14 при помощи рычагов 12 и 1 в разных -уровнях стойка и емкость образуют единую систему в отношении ее опрокидывания относительно точки подвеса грузонесущего устройства (верхняя вершина параллелограмма). В этом сручае равновесие грузонесущего устройства зависит от удерживанаде
го момента, создаваемого внешней ветвйю, а именно от силы тяжести груза и устройства и углов перегиба каната на направляющих блока 17 и 18. При подаче груза в проем здания кронштейн 21 под действием пружины 22 поворачивается в черхнее положение на угол oLij и внешняя ветвь каната прижимается к упору 23. В результате увеличиваются углы перегиба каната на блоках 19 и 20 и соответственно увеличивается
0 удерживающий момент от натяжения внешней ветви, как указывалось, равной силам тяжести груза и грузонесущего устройства. Сохранению равновесия в этом положении способствует
5 также увеличение плеча силы.тяжести стойки, длина которого изменяется от точки подвеса грузонесущего устройства, т.е. йт верхней вершины параллелограмма, образованного рычагами
0 13 и 16. Если необходимо выполнить выравнивание грузонесущего устройства в горизонтальное положение, то в этом случае используется защемление каната в упоре 23. Смысл этого защем5ления состоит в том, что при действии упора обе ветви каната оказываются присоединенными к грузонесущему устройству. Благодаря тому, что ветви каната движутся в противоположных
0 направлениях эта мера служит для выравнивания грузонесущего устройства от движения замкнутого каната в.направлении, соответствующем направлению поворота грузонесущего устройства.
5
После разгрузки емкости 8 грузонесущее устройство сохраняет горизонтальное равновесие, так как в этом случае уменьшается усилие в замкнутом канате и величины удерживающего и
0 опрокидывающего моментов примерно равны. Для возвращения грузонесущего устройства к основанию здания создается натяжение в замкнутом канате, что делается при помощи механизма на5тяжения лебедки. При этом шарнирнорычажная система складывается вдоль вертикальной оси и грузовая емкость 8 приближается к стойке 14. Далее при помощи канатоведущих шкивов лебедки грузонесущее устройство опус0кается на опорную поверхность 5 приемной площадки 2, При этом от действия концевого выключателя останавливаются двигатель и привод каната лебедки. Подъемник подготовлен для
5 очередной загрузки.
Предлагаемая конструкция подъемника проста и надежна в работе и позволит эффективно и качественно решить вопрос подачи различных по ха0рактеру грузов в проемы зданий при их строительстве и ремонте.
Формула изобретения
1. Строительный подъемник, содер5жащий устанавливаемую на кровле здания опору, соединенную посредством трособлочной систекы с лебедкой, установленной у основания здания, при этом трособлочная система имеет груэонесуЩее устройство и выполнена с внутренней и внешней ветвями замкнутого каната, отличающийся тем, что, с цепью повышения надежности устройства и снижения усилия в канате, грузонесущее устройство снабжено стойкой и грузовой емкостью соединенными между сЬбой при помоида шарнирных четырехзвенного и двухзвен ных рычажных механизмов, расположенных на различных уровнях, при этом верхняя и нижние версййны четырехзвен ного механизма соединены с внутренней ветвью замкнутого каната, а на стойке расположены блоки, огибаемые внешней ветвью каната, при этом HHTRние рычаги четырехзвенника выполнены с консолями, которые связаны с одной стороны со стойкой, а с другой с грузонесущей емкостью. 2. Строительный подъемник по п.1/ отличающийся тем, что, о целью регулирования равновесия грузрнесущего устройства, к стойке шарнирно прикреплен взаимодействующий с внешней ветвью каната подпружиненный 1кронштейи с упором, также взаимодействуницим с указанной ветвью каната. Источники информации, принятые во внимание при экспертизе 1. Заявка 2858018/29-11, кл. В 66 В 9/18, 25.12.79.
f
ii
.2


| название | год | авторы | номер документа |
|---|---|---|---|
| Канатный строительный подъемник для длинномерных грузов | 1983 |
|
SU1127833A1 |
| Канатный строительный подъемник для длинномерных грузов | 1981 |
|
SU1002222A1 |
| Канатный строительный подъемник | 1978 |
|
SU716963A1 |
| Строительный подъемник | 1980 |
|
SU945042A1 |
| Канатный строительный подъемник | 1979 |
|
SU867838A1 |
| Канатный строительный подъемник | 1980 |
|
SU893792A2 |
| Канатный строительный подъемник | 1979 |
|
SU839964A1 |
| МАЧТОВЫЙ ПОДЪЕМНИК | 1972 |
|
SU335197A1 |
| КРАН ДЛЯ ПОДЪЕМА И ПОДАЧИ ГРУЗОВ В ОКОННЫЙ ПРОЕМ ЗДАНИЯ | 1991 |
|
RU2048423C1 |
| Струнный подъемник | 1978 |
|
SU753767A1 |