Изобретение относится к грузоподъемным машинам, преимущественно к стреловым самоходным кранам.
Известны стреловые устройства кранов (авторское свидетельство СССР №1070116, кл. В66С 23/64, 1982), гидропривод которых включает гидроцилиндр подъема и опускания стрелы, а стрела оснащена шарнирно-сочлененным гуськом, угол наклона которого изменяется с помощью гибкой оттяжки. Управление гидроцилиндрами осуществляется распределителем с ручным управлением, к его поршневой полости пристыкован гидрозамок, а для плавного опускания стрелы установлен тормозной клапан.
Приводы подъема и опускания стрелы и наклона гуська в этих устройствах не обеспечивают автоматического горизонтального перемещения груза при изменении углов наклона стрелы или гуська, что снижает производительность при выполнении монтажных работ, а применение гибких оттяжек усложняет конструкцию стрелового устройства.
Наиболее близким к предложенному является стреловое устройство крана (патент SU №2021968), содержащее гидроцилиндр, установленный на нераздвижной стреле с гуськом, управляемый распределитель, систему автоматического обеспечения горизонтального переноса груза. Недостатком устройства является то, что оно не может применятся на самоходных кранах, оборудованных телескопической стрелой.
Целью изобретения является обеспечение увеличения производительности кранов, оборудованных раздвижной стрелой, за счет уменьшения времени перемещения груза, а также облегчение работы крановщика за счет автоматического обеспечения горизонтального переноса груза при изменении вылета стрелы.
Это достигается тем, что стреловое устройство крана, содержащее телескопическую стрелу, шарнирно соединенную с платформой крана, шарнирно соединенный со стрелой гусек, гидроцилиндры подъема и опускания стрелы и наклона гуська, управляемый распределитель, через который полости гидроцилиндра наклона гуська сообщены с напорной и сливной линиями, и систему автоматического обеспечения горизонтального переноса груза, которая включает в себя установленные в шарнирах стрелы и гуська потенциометрические датчики углов наклона и усилитель, через который сопротивления датчиков, соединенные между собой по мостовой схеме, подключены в цепь управления распределителем гидроцилиндра наклона гуська, при этом сопротивления датчиков углов наклона выполнены по зависимостям
R1=Ro1α
R2=Ro2[180°-{α+arcsin((L/l)sin(α)-H/l)}],
где R1 - сопротивление датчика угла наклона стрелы, Ом;
R2 - сопротивление датчика наклона гуська, Ом;
Ro1, Ro2 - начальные сопротивления реохордов датчиков, Ом;
α - угол наклона стрелы, град.;
L - длина стрелы, м;
l - длина гуська, м;
Н - высота от шарнира стрелы до нижней точки гуська, м,
отличается тем, что стрела выполнена телескопической и гидроцилиндр наклона гуська крепится на верхнем поясе последней секции телескопической стрелы.
Выполнение сопротивлений датчиков по указанным зависимостям позволяет получить горизонтальные законы передвижения нижней точки гуська при изменении угла наклона стрелы. Применение предложенного устройства, например, на современных пневмоколесных кранах позволяет уменьшить многократность включения привода наклона стрелы и гуська при горизонтальном перемещении груза. Механизмом подъема груз устанавливается на высоту Н, наклоном стрелы автоматически изменяется угол наклона гуська без переключений приводов, что сокращает время на подачу груза в заданное место, а отсутствие гибких оттяжек и лебедки привода гуська уменьшает металлоемкость стрелового устройства крана.
Для обеспечения полного задвижения секции при переводе ее в транспортное положение последняя секция стрелы выполняется со ступенчатой выемкой в передней части, размеры выемки соответствуют размерам гидроцилиндра наклона стрелового гуська, который установлен в выемке.
Также для обеспечения полного задвижения секции при переводе ее в транспортное положение гидроцилиндр наклона гуська можно крепить изнутри последней секции к ее верхнему поясу.
Если гидроцилиндр наклона гуська закрепить к стреловому гуську посредством коромысла и тяги, это даст оптимальный эффект по передачи сил от гидроцилиндра к гуську и позволит снизить давление рабочей жидкости в гидравлической системе.
Причем этот эффект будет максимальным, если длины кинематических звеньев механизма наклона гуська выполнять по следующим соотношениям:
длина стойки α=0,6 lв.з., м;
длина большого плеча коромысла К=1,25 lв.з., м;
длина тяги Т=0,83 lв.з., м,
где lв.з. - расстояния между проушинами гуська.
На фиг.1 представлена схема стрелового устройства крана; на фиг.2 - схема соединения датчиков; на фиг.3 - схема крепления гидроцилиндра наклона гуська при выполнении последней секции со ступенчатой выемкой; на фиг.4 - схема крепления гидроцилиндра наклона гуська изнутри к верхнему поясу последней секции стрелы; на фиг.5 - схема поворота гуська в виде коромысла и тяги.
В стреловое устройство крана входит раздвижная стрела 1 с потенциометрическим датчиком 2 угла наклона, включающим сопротивление 3, установленным в нижнем шарнире стрелы. В верхнем шарнире стрелы и стрелового гуська 4 установлен потенциометрический датчик 5 угла наклона стрелового гуська с сопротивлением 6. Стрела 1 шарнирно соединена с гидроцилиндром 7 наклона стрелового гуська, шток которого соединен с гуськом посредством коромысла и тяги. Также к гидроцилиндру 7 наклона стрелового гуська подсоединен управляемый распределитель 8 жидкости, который в свою очередь трубопроводами соединен с электромагнитами 9, которые через усилитель 10 соединены с сопротивлениями 3, 6 датчиков угла наклона стрелы 1 и стрелового гуська 4.
Для обеспечения безопасности и плавности поршневая полость гидроцилиндра соединена через гидрозамок 11 и тормозной клапан 12 с распределителем.
Устройство работает следующим образом.
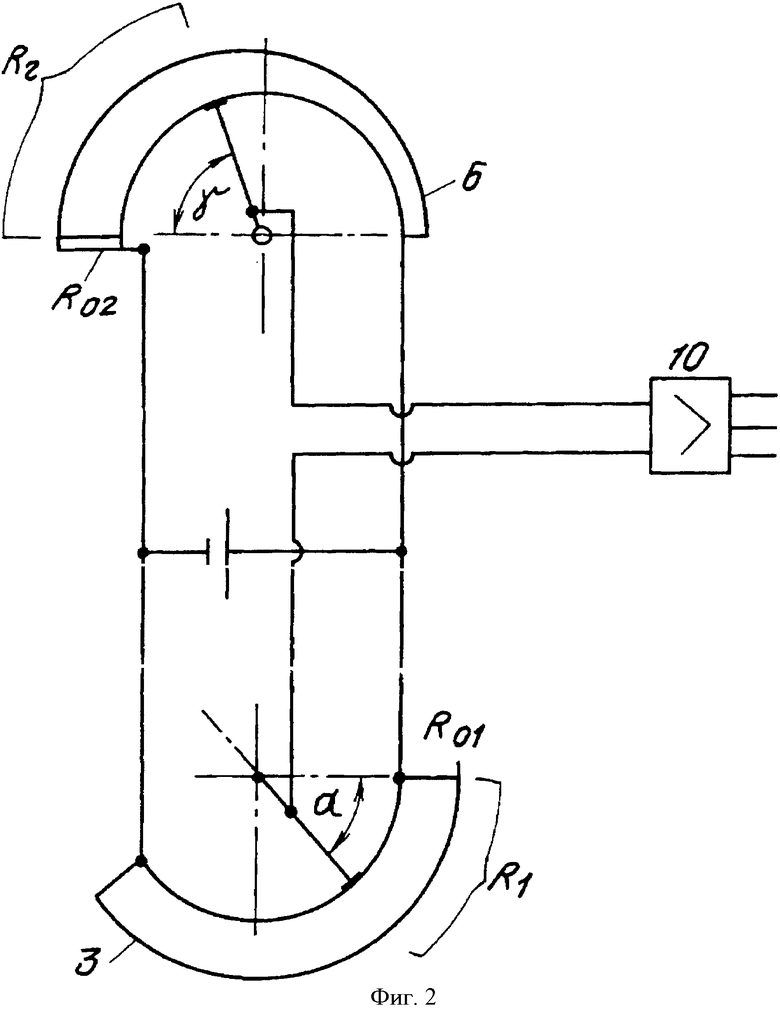
При изменении угла наклона стрелы α пропорционально изменяется сопротивление 3 датчика 2 по линейному закону R1=Ro1 α. Сопротивление 6 датчика 5 соединено с сопротивлением 3 и предварительно сбалансировано. Датчики углов наклона соединены по мостовой схеме, представленной на фиг.2. При изменении сопротивления 3 возникает электрический сигнал, который через усилитель 10 подается к одному из электромагнитов 9 распределителя 8, вызывая его срабатывание и перемещение штока гидроцилиндра 7, изменяющего угол γ наклона гуська.
При изменении угла γ происходит изменение сопротивления 6 до величины выравнивания с сопротивлением 3, при этом прекращается подача электрического сигнала на электромагниты 9, включающие работу гидроцилиндра 7.
Таким образом, при изменении угла α происходит автоматическое изменение угла γ. Горизонтальное перемещение груза при изменении угла обеспечивается при условии Н=const и требуемым соотношением α=f(γ). На основании геометрических соотношений (фиг.1) зависимость между углами α=f(β) представляется в виде

где β - угол наклона гуська относительно горизонтальной плоскости.
Груз перемещается горизонтально при выполнении соотношения

отсюда следует, что функция γ=f(β) описывается формулой

а угол γ=180°-(α+β) формулой

Равенство сопротивлений датчиков 2, 5 обеспечивается при законах изменения сопротивления

На основании выражения (4) при линейном законе изменения сопротивления 3
 закон изменения сопротивления 6 определяется формулой
закон изменения сопротивления 6 определяется формулой
R2=Ro2γ=Ro2[180°-{α+arcsin((L/l)sin(α)-H/l)}].
Таким образом, при выполнении сопротивлений 3, 6 изменения по законам (6), (7) наклон стрелы на угол α вызывает сопротивление датчика 2, которое не соответствует величине R2 сопротивления датчика 5. Электрический сигнал вызывает срабатывание гидроцилиндра 7 и изменения угла γ, в результате чего сопротивление 6 изменяется по закону R2=f(γ) по уравнению (7), в результате чего перемещение штока гидроцилиндра изменением угла α "следит" за углом по условию горизонтального перемещения.
Для обеспечения полного задвижения секции при переводе ее в транспортное положение последнюю секцию стрелы 1 выполняют со ступенчатой выемкой в передней части (см. фиг.3), размеры выемки соответствуют размерам гидроцилиндра наклона стрелового гуська 7, который установлен в выемке и шарнирно прикреплен к верхнему поясу последней секции стрелы.
Также для обеспечения полного задвижения секции при переводе ее в транспортное положение гидроцилиндр наклона гуська 7 можно шарнирно крепить изнутри последней секции 1 к ее верхнему поясу (см. фиг.4).
Для обеспечения максимальных эргономических показателей механизма поворота стрелового гуська гидроцилиндр наклона стрелового гуська 7, одной стороной шарнирно прикрепленный к верхнему поясу последней секции 1, другой стороной крепится к стреловому гуську 4 через систему коромысла 13 и тяги 14 (см. фиг.5), причем длины кинематических звеньев этого механизма должны определятся следующим образом:
длина стойки α=0,7 lв.з., м;
длина большого плеча коромысла К=1,3 lв.з., м;
длина тяги Т=0,85 lв.з., м.
Применение предложенного устройства на современных пневмоколесных кранах позволит уменьшить время горизонтального перемещении груза, облегчить работу крановщика, а отсутствие гибких оттяжек и лебедки привода гуська уменьшает металлоемкость стрелового устройства крана.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТРЕЛОВОЕ УСТРОЙСТВО КРАНА | 1990 |
|
RU2021968C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫЛЕТА В УСТРОЙСТВЕ БЕЗОПАСНОСТИ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271986C2 |
| СТРЕЛОВОЕ ОБОРУДОВАНИЕ К ГРУЗОПОДЪЕМНОМУКРАНУ | 1974 |
|
SU440329A1 |
| Передвижной кран с задвигаемой в транспортное положение стрелой | 1973 |
|
SU519386A1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ (ВАРИАНТЫ) И СИСТЕМА БЕЗОПАСНОСТИ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2009 |
|
RU2396201C1 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2006 |
|
RU2322382C1 |
| ИНЖЕНЕРНАЯ ГУСЕНИЧНАЯ МАШИНА НА БАЗОВОМ ТАНКОВОМ ШАССИ | 2004 |
|
RU2283467C1 |
| СТРЕЛОВОЙ КРАН | 1992 |
|
RU2026259C1 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1977 |
|
SU732200A1 |
| СТРЕЛА АВТОКРАНА ВЫСОКОЙ ГРУЗОПОДЪЕМНОСТИ | 1996 |
|
RU2106295C1 |



Изобретение относится к грузоподъемным машинам, преимущественно к стреловым самоходным кранам. Стреловое устройство крана содержит телескопическую стрелу, шарнирно соединенную с платформой крана, шарнирно соединенный со стрелой гусек, гидроцилиндры подъема и опускания стрелы и наклона гуська, управляемый распределитель, через который полости гидроцилиндра наклона гуська сообщены с напорной и сливной линиями, и систему автоматического обеспечения горизонтального переноса груза, которая включает в себя установленные в шарнирах стрелы и гуська потенциометрические датчики углов наклона и усилитель, через который сопротивления датчиков, соединенные между собой по мостовой схеме, подключены в цепь управления распределителем гидроцилиндра наклона гуська. Сопротивления датчиков углов наклона выполнены по зависимостям R1=Rо1α, R2=Ro2[180o-{α+arcin((L/l)sin(α)-H/l)}]. Стрела выполнена телескопической, и гидроцилиндр наклона гуська крепится на верхнем поясе последней секции телескопической стрелы. Применение предложенного устройства на современных пневмоколесных кранах позволит уменьшить время горизонтального перемещения груза, облегчить работу крановщика, а отсутствие гибких оттяжек и лебедки привода гуська уменьшает металлоемкость стрелового устройства крана. 4 з.п. ф-лы, 5 ил.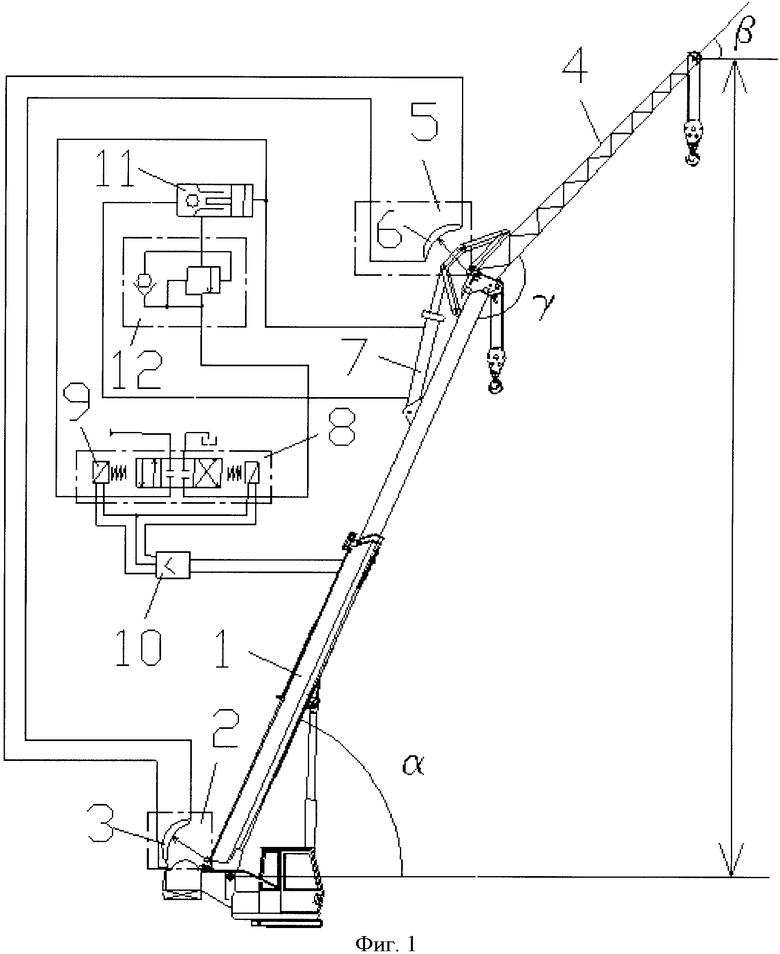
1. Стреловое устройство крана, содержащее телескопическую стрелу, шарнирно соединенную с платформой крана, шарнирно соединенный со стрелой гусек, гидроцилиндры подъема и опускания стрелы и наклона гуська, управляемый распределитель, через который полости гидроцилиндра наклона гуська сообщены с напорной и сливной линиями, и систему автоматического обеспечения горизонтального переноса груза, которая включает в себя установленные в шарнирах стрелы и гуська потенциометрические датчики углов наклона и усилитель, через который сопротивления датчиков, соединенные между собой по мостовой схеме, подключены в цепь управления распределителем гидроцилиндра наклона гуська, при этом сопротивления датчиков углов наклона выполнены по зависимостям
R1=Ro1α;
R2=Ro2[180°-{α+arcsin((L/1)sin(α)-H/1)}], где R1 - сопротивление датчика угла наклона стрелы, Ом;
R2 - сопротивление датчика наклона гуська, Ом;
Ro1, Ro2 - начальные сопротивления реохордов датчиков, Ом;
α - угол наклона стрелы, град.;
L - длина стрелы, м;
l - длина гуська, м;
Н - высота от шарнира стрелы до нижней точки гуська, м; отличающееся тем, что стрела выполнена телескопической, гидроцилиндр наклона гуська крепится к верхнему поясу последней секции телескопической стрелы.
2. Стреловое устройство крана по п.1, отличающееся тем, что последняя секция стрелы выполнена со ступенчатой выемкой в передней части, размеры выемки соответствуют размерам гидроцилиндра наклона стрелового гуська, который установлен в выемке.
3. Стреловое устройство крана по п.1, отличающееся тем, что гидроцилиндр наклона гуська крепится изнутри последней секции к ее верхнему поясу.
4. Стреловое устройство крана по пп.1-3, отличающееся тем, что гидроцилиндр наклона гуська крепится к стреловому гуську посредством коромысла и тяги.
5. Стреловое устройство крана по п.4, отличающееся тем, что длины кинематических звеньев механизма наклона гуська определяются следующими соотношениями:
длинна стойки α=0,6 lв.з, м;
длинна большого плеча коромысла К=1,25 lв.з, м;
длина тяги Т=0,83 lв.з, м;
где lв.з - расстояния между проушинами гуська.
| СТРЕЛОВОЕ УСТРОЙСТВО КРАНА | 1990 |
|
RU2021968C1 |
| КРАН ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ | 2000 |
|
RU2214962C2 |
| US 6364142 В1, 02.04.2002 | |||
| Стрела крана | 1982 |
|
SU1070116A1 |

