Техническое решение относится к системам контроля, защиты и управления подъемно-транспортной техники.
Известен способ измерения вылета грузозахватного органа в ограничителе грузоподъемности стрелового грузоподъемного крана, заключающийся в измерении угла наклона опорной (корневой) секции стрелы относительно опорно-поворотной части крана путем преобразования этого угла в угол поворота движка синусно-косинусного потенциометра, связанного со стрелой и поворотной частью крана при помощи поводка и ползунка, измерении длины телескопической стрелы путем натяжения вдоль нее гибкого кабеля, с закреплением одного конца кабеля на оголовке стрелы, а второго - на подпружиненном кабельном барабане, и преобразовании угла поворота кабельного барабана в перемещение движка линейного потенциометра при помощи червячного редуктора, а также в последующем определении вылета грузозахватного органа путем перемножения выходных сигналов этих потенциометров. Для реализации перемножения в качестве напряжения синусно-косинусного потенциометра используется выходное напряжение линейного потенциометра [1].
Недостатком этого способа является низкая точность определения вылета из-за отсутствия учета отклонения опорно-ходовой части крана от горизонтального положения, т.к. угол наклона стрелы определяется не относительно горизонтальной плоскости (или гравитационной вертикали), а относительно поворотной части крана, которую при эксплуатации практически невозможно установить строго горизонтально. Кроме того, невысокая точность определения вылета в этом способе вызвана отсутствием учета прогиба стрелы и учета расстояния между точкой крепления стрелы на кране и осью вращения поворотной части крана.
Аналогичный способ измерения вылета используется в ограничителях грузоподъемности [2] и [3], отличающихся от описанного тем, что вместо потенциометров используются вращающие трансформаторы [2] или сельсины [3].
Однако замена потенциометров бесконтактными датчиками, выполненными на основе вращающихся трансформаторов и сельсинов, позволяет повысить надежность измерителя вылета, но не устраняет указанных методических недостатков использованного способа измерения вылета, предопределяющих низкую точность измерения.
При использовании известного способа [1, 2, 3] измерение длины стрелы может осуществляться при помощи выдвижных зубчатых реек, расположенных вдоль секций стрелы и приводящих в движение зубчатое колесо, связанное с редуктором [4], или путем натяжения вдоль стрелы гибкого растяжимого органа, фиксации величины линейного растяжения этого органа на заданном расстоянии от точки его крепления на корневой секции стрелы, последующего преобразования выявленного линейного растяжения гибкого органа в угловое и преобразования углового перемещения в электрическое сопротивление [5], или путем натяжения вдоль стрелы подпружиненного гибкого элемента (например, троса), концы которого закреплены на оголовке и на натяжном приспособлении, установленном в корневой части стрелы, и охватывающего тело вращения, кинематически связанное с датчиком линейного перемещения [6].
Однако применение усовершенствованных методов измерения длины стрелы не устраняет указанных методических погрешностей измерения вылета грузозахватного органа крана.
Известен также способ измерения вылета грузозахватного органа в устройстве безопасности грузоподъемного крана путем измерения угла наклона опорной (корневой) секции стрелы и длины стрелы и последующего вычисления вылета микропроцессорным контроллером с использованием полученных результатов измерения в соответствии с установленным порядком (алгоритмом) этого вычисления, априорно заданным в программе контроллера. При этом измерение угла наклона опорной (корневой) секции стрелы осуществляют относительно гравитационной вертикали при помощи маятникового датчика, а измерение длины стрелы - при помощи потенциометрического датчика телескопирования, для чего вдоль стрелы натягивают гибкий орган (кабель), закрепляют его на оголовке стрелы и на подпружиненном кабельном барабане, который устанавливают на корневой секции стрелы, причем ось кабельного барабана через передачу (редуктор) соединяют с осью потенциометра [7], [8].
Недостатком этого способа также является невысокая точность измерения, поскольку в нем не измеряется прогиб стрелы. Датчик, установленный на опорной (корневой) секции стрелы, измеряет угол наклона только этой секции (одной части стрелы), а угол наклона выдвижных секций не измеряется, что приводит к повышенной погрешности измерений вылета. Эта погрешность может иметь значительную величину, в частности ввиду наличия люфтов и зазоров между секциями, которые существенно влияют на вылет и изменяются в процессе эксплуатации крана, например вследствие износа опор-скользунов (пар трения секций телескопической стрелы).
Более совершенным и наиболее близким к предложенному является способ измерения вылета грузозахватного органа в устройстве безопасности (ограничителе нагрузки) стрелового грузоподъемного крана, заключающийся в измерении угла наклона выдвижных секций стрелы с учетом их прогиба, измерении длины стрелы и в последующем определении вылета путем преобразования результатов этих измерений в соответствии с предварительно установленным порядком этого преобразования. При этом, для измерения угла наклона выдвижных секций стрелы с учетом их прогиба, вдоль стрелы натягивают гибкий орган, закрепляют его на оголовке и на натяжном приспособлении, которое выполняют в виде подпружиненного барабана, установленного на опорной (корневой) секции стрелы. С гибким органом связывают поводок, который закрепляют на валу преобразователя измерительного [9].
В этом техническом решении при изменении прогиба стрелы поводок, опирающийся на гибкий орган, изменяет свое угловое положение и поворачивает вал измерительного преобразователя, что приводит к изменению сигнала на его выходе. Благодаря этому, наличие люфтов и зазоров между секциями, а также деформация выдвигаемых секций стрелы не влияют на результаты измерений угла наклона выдвигаемых секций, что повышает точность измерения вылета.
Однако при этом не контролируется угловое положение и деформация опорной (корневой) секции стрелы, что не позволяет получить высокую точность измерения вылета.
Кроме того, ввиду наличия момента трения в измерительном преобразователе, опирание поводка на гибкий орган вызывает деформацию гибкого органа. Это приводит к погрешности измерения угла прогиба стрелы и к соответствующей погрешности измерения вылета.
Дополнительно в известном способе при определении вылета не учитывается, что ось крепления стрелы, как правило, не совпадает с осью вращения поворотной части или с ребром опрокидывания крана. Не учитывается также возможная установка гуська и, соответственно, деформация этого гуська. Это также приводит к соответствующим погрешностям определения вылета.
В известном способе дополнительные погрешности измерения вылета вызывают также возможное вытягивание (растяжение) и провисание гибкого органа под собственным весом, а также нарушение рядовой намотки гибкого органа на барабан в процессе эксплуатации крана или при неточной установке барабана на стрелу крана.
К недостаткам известного способа следует также отнести относительно невысокую надежность из-за наличия гибкого органа и кабельного барабана, имеющих низкую механическую прочность и легко повреждаемых при эксплуатации крана.
Основной задачей, на решение которой направлено предложенное техническое решение, является повышение точности измерения вылета при одновременном повышении надежности.
В заявленном способе измерения вылета грузозахватного органа в устройстве безопасности стрелового грузоподъемного крана, заключающемся в измерении угла наклона и длины стрелы и в последующем определении вылета путем преобразования результатов этих измерений в соответствии с предварительно установленным порядком этого преобразования, поставленная цель достигается тем, что деформацию стрелы при указанном определении вылета учитывают путем измерения углов наклона по меньшей мере двух частей или секций стрелы, а при указанном преобразовании результатов измерений производят суммирование величин горизонтальных проекций отдельных частей или секций стрелы.
Для достижения поставленной цели указанное суммирование производят с учетом расстояния от оси крепления стрелы до оси вращения поворотной части или ребра опрокидывания крана, осуществляя указанное преобразование результатов измерений, в частности, по формуле

где R - вылет;
Lo - длина опорной (корневой) секции стрелы;
Lв - длина выдвижной секции (или выдвижных секций) стрелы;
Lп - расстояние от оси вращения стрелы до оси вращения поворотной части или ребра опрокидывания крана;
α - угол наклона опорной секции стрелы относительно гравитационной вертикали;
β - угол наклона выдвижной секции (выдвижных секций) стрелы относительно гравитационной вертикали.
Поставленная цель достигается также за счет того, что дополнительно осуществляют измерение угла наклона гуська, который дополнительно учитывают при преобразовании результатов измерений по формуле


где Lг - длина гуська;
γ - угол наклона гуська относительно гравитационной вертикали.
При этом угол наклона выдвижной секции (выдвижных секций) стрелы может определяться по формуле

где α - угол наклона опорной (корневой) секции стрелы;
δ - угол наклона вершины (оголовка) стрелы;
А, В - постоянные коэффициенты, определяемые при проектировании крана или экспериментальным путем.
В частности, для грузоподъемного крана с одной жесткой выдвижной секцией стрелы, значения коэффициентов А и В принимают равными А=0, В=1 (β=δ), а для грузоподъемного крана с гибкими выдвижными секциями стрелы принимают А=В=0,5.
Для решения поставленных задач в части достижения высокой точности измерения вылета при возможной неисправности одного из датчиков угла, предварительно, например при проектировании крана или экспериментальным путем, определяют зависимость выходного сигнала датчика угла наклона какой-либо части стрелы от угла наклона другой части стрелы, от нагрузки на стрелу и от длины стрелы, сохраняют эту зависимость в энергонезависимой памяти, дополнительно определяют нагрузку на стрелу, выявляют неисправность датчика угла и, при наличии неисправности, определяют значение выходного сигнала неисправного датчика угла по указанной зависимости и далее используют это значение для определения вылета при указанном преобразовании результатов измерений.
Для исключения погрешности измерения вылета, вызванной растяжением и провисанием гибкого органа, а также нарушением его рядовой намотки, угол наклона выдвижной секции (выдвижных секций) стрелы определяют бесконтактным способом относительно опорной (корневой) секции стрелы, для чего на разных секциях стрелы размещают приемник и передатчик ультразвукового, оптического или электромагнитного излучения, осуществляют передачу и прием излучения, а указанный угол наклона определяют путем измерения направления приема излучения. Для этого, в частности, приемник выполняют с двухэлементной акустической или радиоантенной с вертикальной базой, с помощью которой осуществляют прием сигнала передатчика в двух разнесенных по высоте точках, определяют разность фаз двух принимаемых сигналов, после чего определяют угол наклона выдвижной секции (выдвижных секций) относительно опорной (корневой) секции стрелы по методу фазовых приращений. Причем указанное определение угла наклона выдвижной секции (выдвижных секций) стрелы относительно опорной (корневой) секции осуществляют по формуле

где ϕ - разность фаз принимаемых сигналов;
L - расстояние между точками приема (база), выраженное в длинах волн используемого излучения.
Решение поставленной технической задачи достигается также за счет того, что длину выдвижной секции (выдвижных секций) стрелы определяют бесконтактным способом, для чего на стреле размещают приемник и передатчик ультразвукового, оптического или электромагнитного излучения, осуществляют передачу и прием излучения, после чего определяют указанную длину импульсным, фазовым, частотным или триангуляционным методом.
Возможный вариант этого способа заключается в том, что осуществляют одновременную передачу электромагнитного или оптического, в частности инфракрасного, и ультразвукового импульса, осуществляют их прием, определяют разность времени прихода принимаемых сигналов и, путем умножения указанной разности времени на скорость распространения ультразвукового излучения, получают указанную длину выдвижной секции (выдвижных секций) стрелы.
Для достижения поставленной цели измерение угла наклона и длины стрелы или ее выдвижных секций может осуществляться косвенным путем. Для этого измеряется расстояние от крюковой подвески крана до заранее выбранной точки поворотной части крана или опорной (корневой) секции стрелы и полученный результат этого измерения используется для последующего определения вылета. Причем указанное измерение расстояния может осуществляться бесконтактным методом с использованием ультразвукового, оптического или электромагнитного излучения, для чего на крюковой обойме размещается передатчик излучения, а в заранее выбранной точке поворотной части крана или опорной (корневой) секции стрелы - приемник излучения, осуществляется передача и прием излучения, после чего указанная длина определяется импульсным, фазовым, частотным или триангуляционным методом. При этом приемник выполняют с двухэлементной акустической или радиоантенной с вертикальной базой, с помощью которой осуществляют прием сигнала передатчика в двух разнесенных по высоте точках, определяют разность фаз двух принимаемых сигналов и, соответственно, угол между направлением на крюковую обойму и точкой установки приемника на кране, после чего определяют вылет с учетом полученного результата измерения этого угла.
Отличительные признаки предложенного технического решения находятся в прямой причинно-следственной связи с указанным техническим результатом - повышением точности измерения вылета, поскольку реализация этих признаков позволяет:
- исключить методические погрешности измерения вылета, связанные с любыми видами деформаций (прогибов) любых частей стрелы (включая гусек), при всех ее длинах и углах наклона;
- исключить методические погрешности измерения вылета, вызванные несовпадением оси крепления стрелы и оси вращения поворотной части или ребра опрокидывания крана;
- исключить погрешности измерения, вызванные деформацией, растяжением, провисанием и неравномерностью намотки гибкого органа на барабан (при реализации предложенного бесконтактного измерения прогиба и длины стрелы);
- обеспечить сохранение работоспособности и точности измерения вылета при отказе одного из датчиков угла наклона какой-либо части стрелы.
Одновременно реализация предложенного способа позволяет повысить надежность измерений за счет исключения гибкого органа и кабельного барабана (при бесконтактном измерении прогиба и длины стрелы).
Вся совокупность признаков, содержащихся в независимом пункте формулы изобретения, не известна из уровня техники.
Отдельные отличительные признаки заявленного способа известны из уровня техники, но не подтверждена известность их влияния на указанный заявителем технический результат.
В частности, из RU 2093452 С1, МКИ6 В 66 С 13/18, 15/00, 23/88, 20.10.1997 известно измерение угла наклона гуська. Но это изменение осуществляется не для повышения точности измерения вылета (что является основной задачей предложенного технического решения), а с иной целью - для повышения безопасности работы крана. При этом вылет RL определяется без учета деформации стрелы по формуле RL=Li×Sinθ, где Li - длина стрелы, а θ - угол ее наклона (см. RU 2093452, стр. 6, 2-я колонка).
В качестве другого примера можно привести измерение угла наклона гуська в предохранительном устройстве по SU 1101402 А, МКИ3 В 66 С 23/88, 07.07.1984, в котором это измерение осуществляется не для повышения точности измерения вылета, а для повышения надежности устройства. При этом влияние деформации стрелы на вылет также не учитывается (см. описание SU 1101402, формулы, приведенные на стр. 3 в левой колонке №3).
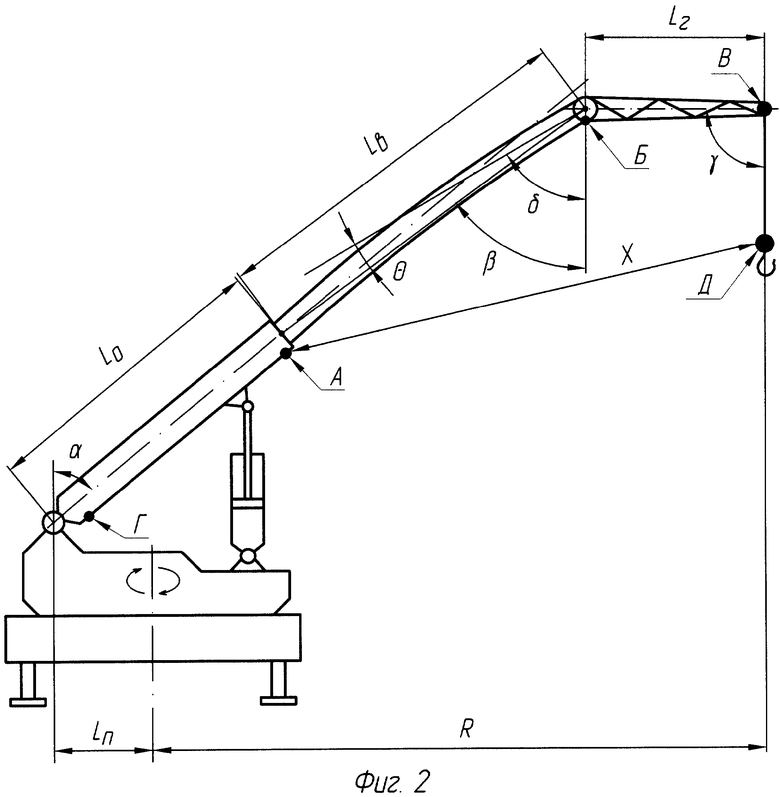
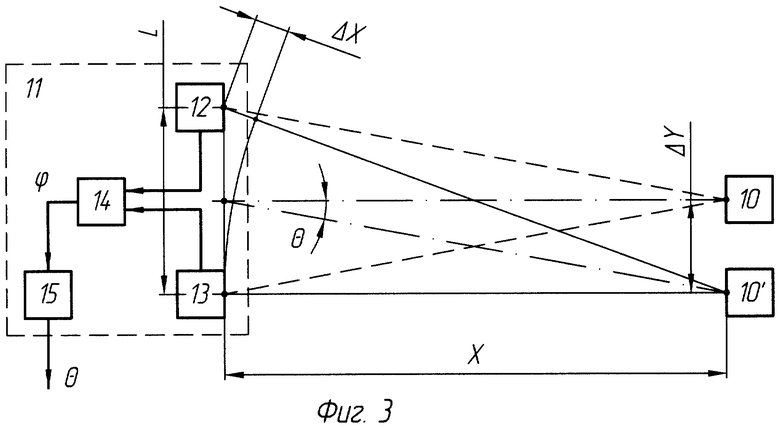
На фиг.1 приведена функциональная схема устройства безопасности грузоподъемного крана, реализующего предложенный способ измерения вылета. На фиг.2 схематично показаны возможные места установки датчиков угла наклона отдельных частей (секций) стрелы крана. Фиг.3 поясняет принцип бесконтактного измерения угла прихода излучения и, соответственно, прогиба стрелы или положения крюковой обоймы крана в пространстве.
Устройство безопасности, приведенное на фиг.1, содержит микропроцессорный вычислитель (цифровую вычислительную машину) 1, модуль управления 2, модуль ввода/вывода информации 3, модуль памяти 4, модуль реального времени 5, исполнительный модуль 6, модуль индикации 7 и датчики (первичные преобразователи) параметров грузоподъемной машины 8.
При этом N датчиков 8 (датчики 1.1...1.N) расположены на опорно-ходовой, поворотной части крана и на опорной (корневой) секции стрелы, а М датчиков 8 (датчики 2.1...2.М) расположены на выдвигаемых секциях, на оголовке и на гуське стрелы. Датчики 2.1...2.М в устройстве безопасности подключены через кабельный барабан 9.
Датчики 8 в общем случае включают в себя датчик угла подъема (наклона) стрелы, датчик угла наклона промежуточной выдвигаемой секции стрелы, датчик угла наклона оголовка стрелы, датчик угла наклона гуська, датчик длины стрелы (бесконтактный или совмещенный с кабельным барабаном), датчик массы груза (датчик силы или датчики давления), датчик угла поворота грузоподъемной машины (датчик азимута), датчик (концевой выключатель) предельного подъема грузозахватного органа, датчики (концевые выключатели) положений рычагов управления гидравлическими распределителями грузоподъемного крана и другие датчики, необходимость установки которых определяется конструкцией конкретного грузоподъемного крана, на который устанавливается устройство (система) безопасности.
Датчики угла наклона отдельных частей (секций) стрелы могут быть выполнены на основе инклинометров или акселерометров, например серии ADXL фирмы AD. Причем, при наличии технических сложностей с подключением проводов к отдельным датчикам, расположенным, например, на промежуточных секциях телескопической стрелы, эти датчики могут быть выполнены бесконтактными. Бесконтактные датчики угла наклона, кроме инклинометра-акселерометра, дополнительно содержат радиопередатчик, инфракрасный или ультразвуковой излучатель, подключенные к встроенному микроконтроллеру датчика. Питание бесконтактного датчика осуществляется от автономного источника питания, например литиевой батареи.
Все датчики 8 могут быть выполнены с общей мультиплексной линией связи - LIN, CAN и т.д. и, соответственно, объединены через эту линию, либо могут подключаться к модулю ввода/вывода 3 при помощи отдельных проводов.
Микропроцессорный вычислитель (электронный блок) 1 может быть выполнен на микроконтроллере, модуль управления 2 - в виде клавиатуры (набора кнопок-клавиш). Модуль ввода/вывода информации 3, обеспечивающий согласование логических уровней входных и выходных сигналов микропроцессорного вычислителя 1 с модулем управления 2, с датчиками 8 и с исполнительным модулем 6, может быть выполнен на базе интерфейсных микросхем, например типа МСР2510, L9637D и т.д.
Модуль памяти 4 может быть выполнен на базе микросхем серии AT45D, модуль реального времени 5 - на основе специализированной микросхемы со встроенным кварцевым резонатором и литиевой батареей питания, исполнительный модуль 6 - в виде набора силовых электронных ключей, а модуль индикации 7 - в виде набора светодиодов и символьных жидкокристаллических индикаторов.
При измерении угла наклона (деформации) стрелы бесконтактным методом сигналы передатчика 10 (см. фиг.3) принимаются приемником 11 с помощью двух антенн 12, 13, разнесенных по вертикали на расстояние L. Эти сигналы поступают на блок 14 определения фазового сдвига ϕ принимаемых сигналов и далее на микропроцессорный вычислитель 15, определяющий направление приема излучения θ от передатчика 10.
Поясним суть предложенного способа на примере работы реализующего его устройства.
Перед началом работы грузоподъемного крана крановщик при помощи органов управления, расположенных в модуле управления 2, устанавливает ограничения по координатной защите, параметры используемого стрелового оборудования (наличие, длина и угол наклона гуська), характеристики опорного контура и т.д. Количество и вид этих параметров определяются конструкцией конкретного грузоподъемного крана и сохраняются в памяти микропроцессорного вычислителя 1 или в модуле памяти 4.
Кроме того, в память микропроцессорного вычислителя 1 или в модуль памяти 4 предварительно (до начала работы грузоподъемного крана) записываются величины нагрузок, допустимых для различных значений вылета грузозахватного органа. Эти величины определяются, как правило, расчетным путем при проектировании грузоподъемного крана и представлены в виде его грузовых характеристик.
Микропроцессорный вычислитель 1 работает по программе, записанной в его встроенной памяти программ или в модуле памяти 4, и через модуль ввода/вывода информации 3 осуществляет обмен информацией (например, по принципу: передача запроса - прием информации) с датчиками параметров 8 по общей мультиплексной линии связи или по отдельным проводам. После получения информации от датчиков 8 микропроцессорный вычислитель 1 путем преобразования этой информации в соответствии с предварительно установленным порядком этого преобразования, заданным программой, определяет действительные значения рабочих параметров грузоподъемной машины - текущую нагрузку и фактическое положение ее грузоподъемного (стрелового) оборудования, включая величину вылета грузозахватного органа. Далее микропроцессорный вычислитель 1 осуществляет сравнение текущего положения стрелы с пороговыми уровнями, заданными крановщиком при введении параметров координатной защиты, а также сравнение текущей нагрузки грузоподъемного крана с запомненной допустимой нагрузкой для текущего значения вылета грузозахватного органа. После чего микропроцессорный вычислитель 1, в зависимости от результатов этого сравнения, т.е. при приближении стрелы к границам разрешенной зоны работы по координатной защите или при превышении максимально допустимой нагрузки на данном вылете, формирует предупреждающие сигналы, поступающие на модуль индикации 7, и сигналы управления электрогидравлическими исполнительными устройствами, которые через модуль ввода/вывода 3 поступают на исполнительный модуль 6, блокируя работу крана. Благодаря этому осуществляется координатная защита и защита крана от перегрузки.
Дополнительно микропроцессорный вычислитель 1 при помощи модуля индикации 7 обеспечивает отображение основных параметров его работы - величины вылета, степени загрузки по грузовому моменту, массы поднимаемого груза, высоты оголовка стрелы и т.д. При необходимости, с использованием модуля памяти 4, микропроцессорный вычислитель 1 осуществляет запись рабочих параметров крана и времени их изменения в модуль памяти 4, реализуя функции встроенного регистратора параметров.
Указанное определение величины вылета грузозахватного органа микропроцессорный вычислитель 1 осуществляет путем преобразования результатов измерений рабочих параметров (выходных сигналов датчиков 8) в соответствии с предварительно установленным порядком этого преобразования, заданным программой, записанной в памяти микропроцессорного вычислителя 1 или в блоке памяти 4. Алгоритм этого преобразования (вычисления вылета) базируется на определении и суммировании величин проекций отдельных частей или секций стрелы на горизонтальную плоскость с учетом деформации (прогиба) стрелы под нагрузкой, которая выявляется путем измерения углов наклона двух и более частей или секций стрелы при помощи датчиков 8. В общем случае эти датчики устанавливаются на опорной (корневой), на всех выдвигаемых секциях стрелы, на оголовке стрелы и на гуське.
Необходимое количество устанавливаемых на стреле датчиков угла определяется при проектировании устройства безопасности исходя из заданных требований к точности измерения вылета.
Априорно известные величины длин частей или секций стрелы, например длина опорной (корневой) секции стрелы, длина гуська и т.д., а также расстояние от оси вращения стрелы до оси вращения поворотной части или ребра опрокидывания крана, определяются при проектировании крана или измеряются на существующем грузоподъемном кране, предварительно записываются и сохраняются в памяти микропроцессорного вычислителя 1 или в блоке памяти 4. Длина телескопических секций стрелы измеряется при помощи датчика длины стрелы, входящего в состав датчиков рабочих параметров 8. Этот датчик, в частности, может иметь традиционную конструкцию на основе кабельного барабана [7], либо может быть бесконтактным, выполненным по схеме дальномера любой конструкции с использованием инфракрасного, ультразвукового или оптического излучения.
Для определения вылета R в предложенном способе осуществляется определение и суммирование величин горизонтальных проекций отдельных частей или секций стрелы с учетом ее деформации и расстояния от оси крепления стрелы до оси вращения поворотной части или ребра опрокидывания крана.
Иными словами, в предложенном способе путем установки набора датчиков угла на различных частях (секциях) стрелы осуществляется прямое измерение не только наклона основной (корневой) секции стрелы, но и ее деформация (пространственное положение). Далее, при априорно известных или измеренных длинах этих частей (секций) стрелы, производится вычисление вылета. Фактически в предложенном способе, в отличие от известных технических решений, по результатам измерения фактических углов наклона отдельных частей стрелы производится кусочно-линейная аппроксимация пространственного положения деформируемой стрелы грузоподъемного крана.
В частности, микропроцессорный вычислитель 1, работая по программе, при определении вылета осуществляет преобразование результатов измерения углов наклона отдельных частей стрелы и длины стрелы по формуле

где R - вылет (фиг.2);
Lo - длина опорной (корневой) секции стрелы;
Lв - длина выдвижной секции (или выдвижных секций) стрелы;
Lп - расстояние от оси вращения стрелы до оси вращения поворотной части или ребра опрокидывания крана;
α - угол наклона опорной секции стрелы относительно гравитационной вертикали (измеряется датчиком А, показанным на фиг.2);
β - угол наклона выдвижной секции (выдвижных секций) стрелы относительно гравитационной вертикали (см. фиг.2).
Если грузоподъемный кран имеет гусек, то на него дополнительно устанавливается датчик угла наклона гуська (один из датчиков 2.1...2.М или датчик В, показанный на фиг.2), а микропроцессорный вычислитель 1 программно реализует вычисления по формуле

где Lг - длина гуська (см. фиг.2);
γ - угол наклона гуська относительно гравитационной вертикали.
В приведенных формулах (1), (2) углы α, β и γ приведены относительно гравитационной вертикали. Если же эти углы приводятся относительно горизонтальной плоскости, то функции Sin заменяются на функции Cos. В остальном приведенные формулы не изменяются.
Прямое измерение угла β - угла наклона выдвижной секции (выдвижных секций) стрелы относительно гравитационной вертикали, возможно при применении датчика угла наклона, описанного в прототипе [9]. Этот угол может быть также определен через измерение углов наклона опорной (корневой) секции вершины (оголовка) стрелы

где α - угол наклона опорной (корневой) секции стрелы;
δ - угол наклона вершины (оголовка) стрелы (измеряется датчиком Б, показанным на фиг.2);
А, В - постоянные коэффициенты.
Величины постоянных коэффициентов А и В определяют характер изгиба (форму) стрелы под нагрузкой. Они могут быть определены при проектировании крана или экспериментальным путем. Например, при максимальной длине стрелы экспериментальным путем при двух различных нагрузках (в частности, при максимальной нагрузке и при нагрузке, составляющей 50% от максимальной) непосредственно на грузоподъемном кране экспериментально измеряются значения всех трех углов α, β и γ. Затем значения коэффициентов А и В определяются из формулы (3) как решение двух линейных уравнений с двумя неизвестными.
В частном случае, когда стрела крана имеет одну жесткую выдвижную секцию, различие в углах α и δ обусловлены, в основном, люфтами и зазорами между секциями стрелы. В этом случае значения коэффициентов А и В принимают: А=0, В=1 (при этом β=δ). Если же люфты и зазоры между секциями стрелы минимальны, то в первом приближении стрела изгибается по дуге и значения коэффициентов А и В принимают равными А=В=0,5.
Опорная (корневая) секция стрелы обычно имеет высокую жесткость и ее изгиб пренебрежимо мал. Если же ее жесткость невелика, то в нижней части этой секции (вблизи оси вращения стрелы) в точке Г (см. фиг.2) устанавливается дополнительный (второй) датчик угла наклона опорной (корневой) секции стрелы и далее, с учетом результатов измерения углов наклона этой секции в точках А и Г, аналогичным образом учитывается влияние изгиба опорной (корневой) секции на величину вылета грузозахватного органа.
Угол наклона выдвижной секции (выдвижных секций) относительно опорной (корневой) секции стрелы может быть определен бесконтактным способом с использованием ультразвукового, оптического или электромагнитного излучения. Для этого на разных секциях стрелы размещают приемник и передатчик излучения, осуществляют передачу и прием излучения, а указанный угол наклона определяют путем измерения направления приема излучения.
В частности, в точке Б (см. фиг.2) устанавливается передатчик 10 (см. фиг.3), а в точке А - приемник излучения 11. Приемник 11 выполняется с двумя акустическими или радиоантеннами 12, 13, разнесенными по высоте (вертикальная база L).
Если оси приемника и передатчика совпадают, то обе антенны 12, 13 приемника 11 равноудалены от передатчика 10. Соответственно, при излучении передатчиком 10 синусоидального сигнала, сдвиг фаз (принимаемых антеннами 12, 13 сигналов передатчика равен нулю. При прогибе стрелы под воздействием нагрузки происходит смещение передатчика на расстояние ΔY - передатчик 10 занимает положение 10' (см. фиг.3) и направление приема сигналов передатчика изменяется на угол θ. В соответствии с этим, расстояние от передатчика до двух антенн 12 и 13 отличается на величину ΔХ (см. фиг.3).
Сигналы с антенн 12 и 13 поступают на блок 14 определения фазового сдвига ϕ принимаемых сигналов и далее на микропроцессорный вычислитель 15, определяющий направление приема излучения θ от передатчика 10, т.е. угол наклона выдвижной секции (выдвижных секций) относительно опорной (корневой) секции стрелы по методу фазовых приращений.
Микроконтроллер вычислителя 15 программным способом реализует функцию

где ϕ - разность фаз принимаемых сигналов;
L - расстояние между точками приема (база), выраженное в длинах волн используемого излучения.
Если приемник ориентирован вдоль опорной (корневой) секции стрелы, то угол наклона выдвижной секции (выдвижных секций)

Длина выдвижной секции (выдвижных секций) стрелы (Lв на фиг.2 или Х на фиг.3) может быть определена бесконтактным способом. Для этого в передатчике 10 осуществляют модуляцию излучения и, после приема этого излучения, определяют эту длину импульсным, фазовым или частотным методом. Эти методы базируются на измерении времени распространения излучения от передатчика 10 к приемнику 11.
Для оптического излучения может быть использован триангуляционный метод измерения, который предусматривает формирование при помощи передатчика светового пятна на контролируемой поверхности стрелы (например, в точках Б или Д на фиг.2), прием отраженного сигнала, получение его изображения на многоэлементной фоточувствительной линейке и определение расстояния Lв или Х по положению изображения на этой линейке.
Особенности реализации приемника и передатчика излучения с возможностью измерения расстояния (по существу - функциональные схемы дальномеров) общеизвестны из технической литературы.
В частном случае возможно построение дальномера, в котором передатчик 10 осуществляет одновременную передачу электромагнитного или оптического и ультразвукового импульса. Приемник 11 осуществляет их прием. При этом антенна 12, например, осуществляет прием электромагнитного или оптического сигнала, а антенна 13 - ультразвукового. Блок 14 выполняется с возможностью определения разности времени прихода принимаемых сигналов, а блок 15 осуществляет умножение этой разности времени на скорость распространения ультразвукового излучения. В результате этого получается длина выдвижной секции (выдвижных секций) стрелы.
В заявленном изобретении предложено также измерение угла наклона и длины стрелы или ее выдвижной секции (выдвижных секций) косвенным путем - через измерение расстояния от крюковой подвески крана до заранее выбранной точки поворотной части крана или опорной (корневой) секции стрелы, а также величины угла между направлением на крюковую обойму и точкой установки приемника на кране.
Для этого приемник ультразвукового, оптического или электромагнитного излучения устанавливается, например, в точке А (см. фиг.2), а передатчик соответствующего излучения устанавливается не в точке Б, а в точке Д (на крюковой обойме). При этом бесконтактное измерение расстояния и угла, а также определение вылета осуществляются аналогичным образом.
Применение нескольких датчиков угла наклона различных частей (секций) стрелы позволяет обеспечить высокую точность измерения вылета при наличии неисправности любого датчика угла.
Для реализации такой возможности предварительно, например при проектировании крана или экспериментальным путем, определяют зависимость выходного сигнала датчика угла наклона какой-либо части стрелы от угла наклона другой части стрелы, нагрузки на стрелу и длины стрелы. Конкретный вид этой зависимости зависит от конструкции грузоподъемного крана и мест установки датчиков на стреле.
Эта зависимость в виде формулы или таблицы записывается в энергонезависимую память - в модуль памяти 4.
Нагрузка на стрелу, например изгибающий момент или вес поднимаемого груза, как было описано выше, определяется микропроцессорным вычислителем 1.
Датчики угла наклона 8 выполняются со встроенными устройствами контроля их исправности (с самодиагностикой) и через модуль ввода/вывода 3 передают микропроцессорному вычислителю 1 сигналы о своей неисправности. Микропроцессорный вычислитель 1 может также выявлять неисправность датчиков 8 путем контроля и сопоставления уровней их выходных сигналов, т.е. путем выявления датчика, выходной сигнал которого заведомо выходит за установленные допустимые пределы (например, с использованием того, что деформация стрелы не может превышать априорно известную максимальную величину).
Микропроцессорный вычислитель 1, работая по программе, после получения сигнала о наличии неисправности какого-либо датчика определяет значение его выходного сигнала по зависимости, записанной в модуле памяти 4 и далее используют это значение для определения вылета. В результате, неисправность любого датчика угла наклона какой-либо части или секции стрелы несколько уменьшает точность аппроксимации пространственного положения деформируемой под нагрузкой стрелы, но устройство безопасности сохраняет свою работоспособность и высокую точность определения вылета.
В целом, реализация предложенного способа позволяет существенно повысить точность измерения вылета грузозахватного органа стрелового грузоподъемного крана. Это приводит к повышению эффективности защиты крана от перегрузки, а также эффективности координатной защиты крана.
Дополнительно необходимо учесть, что гибкий орган (кабель) и кабельный барабан имеют невысокую механическую прочность. Поэтому в процессе эксплуатации крана возможны их повреждения, например ветками деревьев. В этой связи реализация бесконтактного измерения длины и деформации стрелы позволяет исключить гибкий орган и кабельный барабан и, соответственно, получить более высокую надежность устройства безопасности.
Источники информации
1. А.с. SU 447350, МПК B 66 C 15/00, 23/88, 25.10.1974.
2. А.с. SU 449874, МПК B 66 C 15/00, 23/88, 15.11.1974.
3. А.с. SU 887444, МПК3 B 66 C 23/90, 07.12.1981.
4. А.с. SU 840009, МПК3 B 66 C 23/88, 23.06.1981.
5. А.с. SU 1703609, МПК5 B 66 C 23/88, 07.01.1992.
6. Патент RU 2128622 С1, МПК6 B 66 C 23/88, 13/46, 10.04.1999.
7. Ограничитель нагрузки крана ОНК-140-13. Новые нормативные материалы по безопасной эксплуатации подъемных сооружений. Вып.2, 1999. - М.: Изд-во ПИО ОБТ, с.47-86.
8. Патент RU № 2011632 С1, МПК5 B 66 C 23/90, 30.04.1994.
9. А.с. SU 1446094 A1, МПК4 B 66 С 23/90, 23.12.1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2005 |
|
RU2282577C2 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗОК | 2004 |
|
RU2276096C2 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2270162C2 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ (ВАРИАНТЫ) И СИСТЕМА БЕЗОПАСНОСТИ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2009 |
|
RU2396201C1 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271332C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2298518C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ВАРИАНТЫ) | 2008 |
|
RU2376238C1 |
| СПОСОБ ЗАДАНИЯ КРАНОВЩИКОМ РАБОЧЕЙ ЗОНЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2280610C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ УСТРОЙСТВА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2004 |
|
RU2277065C2 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2007 |
|
RU2345944C1 |
Изобретение относится к подъемно-транспортному оборудованию, а именно к устройствам безопасности стреловых грузоподъемных кранов. Способ измерения вылета заключается в измерении угла наклона и длины стрелы и последующем определении вылета путем преобразования результатов этих измерений в соответствии с предварительно установленным порядком этого преобразования. Деформацию стрелы при указанном определении вылета учитывают путем измерения углов наклона по меньшей мере двух частей или секций стрелы, а при преобразовании указанных результатов измерений производят суммирование величин горизонтальных проекций отдельных частей или секций стрелы. Это суммирование производят с учетом расстояния от оси крепления стрелы до оси вращения поворотной части или ребра опрокидывания крана. Преобразование результатов измерений осуществляют по формуле R=Lo×Sinα+Lв×Sinβ±Lп, где R -вылет, Lo - длина опорной секции стрелы, Lв - длина выдвижной секции или выдвижных секций стрелы, Lп - расстояние от оси вращения стрелы до оси вращения поворотной части или ребра опрокидывания крана, α - угол наклона опорной секции стрелы относительно гравитационной вертикали, β - угол наклона выдвижной секции (выдвижных секций) стрелы относительно гравитационной вертикали. При этом угол наклона выдвижной секции (выдвижных секций) стрелы определяют по формуле β=A×α+B×δ, где А, В - постоянные коэффициенты, определяемые при проектировании крана или экспериментальным путем. Изобретение повышает точность измерения вылета при одновременном повышении надежности. 17 з.п. ф-лы, 3 ил.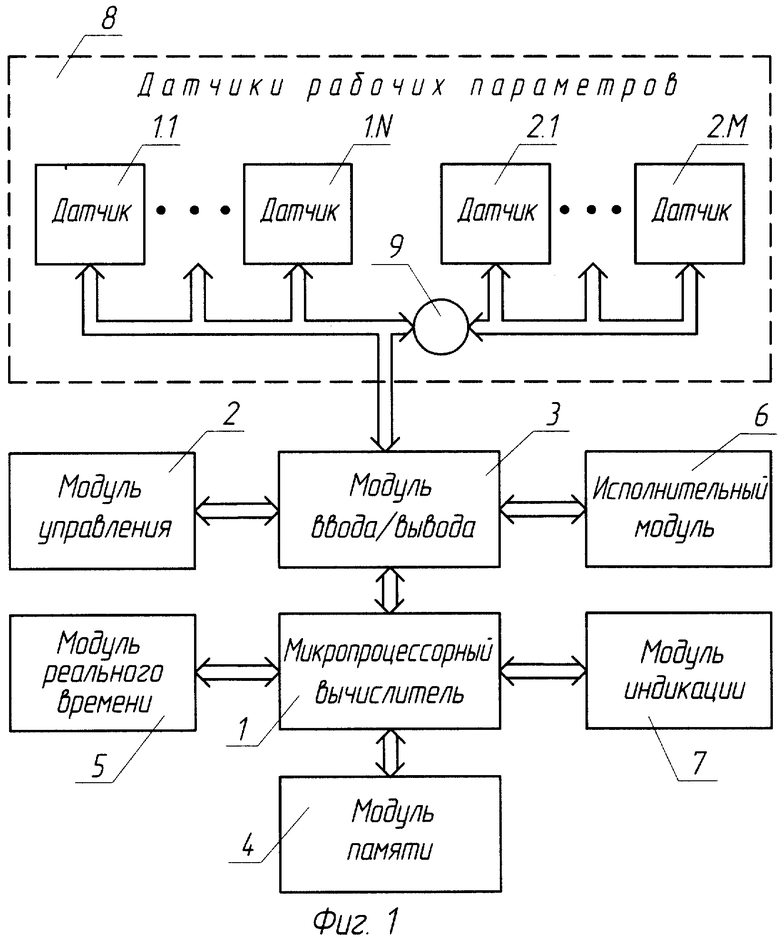
R=Lo·Sinα+Lв·Sinβ±Lп,
где R - вылет;
Lo - длина опорной (корневой) секции стрелы;
Lв - длина выдвижной секции (или выдвижных секций) стрелы;
Lп - расстояние от оси вращения стрелы до оси вращения поворотной части или ребра опрокидывания крана;
α - угол наклона опорной секции стрелы относительно гравитационной вертикали;
β - угол наклона выдвижной секции (выдвижных секций) стрелы относительно гравитационной вертикали.
R=Lo·Sinα+Lв·Sinβ+Lг·Sinγ±Lп,
где Lг - длина гуська;
γ - угол наклона гуська относительно гравитационной вертикали.
β=А·α+В·δ,
где α - угол наклона опорной (корневой) секции стрелы;
δ - угол наклона вершины (оголовка) стрелы;
А, В - постоянные коэффициенты, определяемые при проектировании крана или экспериментальным путем.
θ=arccos [ϕ/(2·π·L)],
где ϕ - разность фаз принимаемых сигналов;
L - расстояние между точками приема (база), выраженное в длинах волн используемого излучения.
| Ограничитель нагрузки стрелового крана | 1987 |
|
SU1446094A1 |
| Ограничитель грузоподъемности для стрелковых самоходных кранов | 1972 |
|
SU447350A1 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1977 |
|
SU737352A2 |
| Устройство для определения длины телескопической стрелы | 1989 |
|
SU1703609A1 |

