Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в системах защиты и управления стреловых грузоподъемных кранов.
Известен способ защиты грузоподъемного крана от перегрузки путем установки допустимых значений нагрузки для различных угловых положений его стрелы, контроля текущих значений этих параметров в процессе работы крана, сравнения текущего значения нагрузки с допустимым для текущего положения стрелы и формирования предупреждающих сигналов и сигналов управления исполнительными устройствами крана в зависимости от результатов этого сравнения [1].
Устройство для его осуществления содержит датчик нагрузки, подключенный к входу сравнивающего устройства, выход которого соединен с выходным устройством.
Недостатком этого способа и реализующего его устройства является отсутствие защиты грузоподъемного крана от столкновений с препятствиями (отсутствие координатной защиты) при работе крана в стесненных условиях.
Наиболее близким к предложенному является способ повышения безопасности работы стрелового грузоподъемного крана путем предварительного определения и запоминания предельно допустимых значений параметров работы крана, характеризующих нагрузку и пространственное положение его стрелы или грузозахватного органа, определения в процессе работы крана текущих значений этих параметров с использование результатов прямого измерения длины стрелы, а также прямого или косвенного измерения других параметров работы крана, последующего сравнения этих текущих значений с предельно допустимыми и формирования, в зависимости от результатов этих сравнений, предупредительных сигналов и сигналов блокирования движений крана [2, 3].
Система безопасности стрелового грузоподъемного крана, реализующая известный способ, содержит датчик длины стрелы и другие датчики параметров работы крана, исполнительное устройство и соединенный с ним цифровой вычислитель, выполненный с возможностью приема и обработки выходных сигналов датчиков и определения текущих значений параметров, характеризующих нагрузку и пространственное положение стрелы или грузозахватного органа крана, сравнения этих текущих значений с предельно допустимыми, а также с возможностью формирования предупредительных сигналов и сигналов управления исполнительным устройством крана в зависимости от результатов этих сравнений [2, 3].
В известном техническом решении обеспечивается как защита грузоподъемного крана от перегрузки, так и защита от столкновений его стрелы или грузозахватного органа с различными препятствиями (координатная защита).
Однако для реализации этих функций используется прямое измерение длины стрелы. Это измерение на грузоподъемных кранах традиционно осуществляется с помощью датчика длины, выполненного в виде подпружиненного кабельного барабана, снабженного датчиком его поворота. К барабану прикреплен гибкий орган (кабель), охватывающий барабан. Гибкий орган (кабель) натянут вдоль стрелы и своим вторым концом прикреплен к оголовку стрелы.
Такое конструктивное исполнение датчика длины стрелы приводит к низкой надежности системы безопасности ввиду сложности конструктивного исполнения этого датчика и возможности повреждения гибкого органа при работе крана, в частности ветками деревьев.
Техническим результатом, на достижение которого направлена группа изобретений, является повышение надежности и упрощение конструкции системы безопасности путем реализации защиты от перегрузки и/или координатной защиты стрелового грузоподъемного крана с телескопируемой стрелой без использования датчика длины стрелы. Еще одним техническим результатом является улучшение эксплуатационных характеристик системы безопасности за счет обеспечения возможности ее функционирования при соприкосновении стрелы крана с ветками деревьев и иными предметами, которые в известном техническом решении приводят к повреждению гибкого органа или к его спаданию с кабельного барабана.
В первом варианте предложенного способа повышения безопасности работы стрелового грузоподъемного крана путем предварительного определения или задания допустимого значения параметра, характеризующего нагрузку крана, его запоминания, определения в процессе работы крана текущего значения этого параметра путем его вычисления с использование результатов прямого и/или косвенного измерения других параметров работы крана, сравнения его текущего значения с допустимым и последующего формирования, в зависимости от результатов этого сравнения, предупредительных сигналов и/или сигналов управления или блокирования управления исполнительным устройством крана указанные технические результаты достигаются за счет того, что при определении текущего значение параметра, характеризующего нагрузку крана, его представляют в виде функции давления в гидроцилиндре подъема стрелы, угла наклона стрелы, а также усилия в грузовом канате или давления в гидроцилиндре телескопирования стрелы. При этом за параметр, характеризующий нагрузку крана, принимают грузовой момент крана, вес поднимаемого груза, нагрузку выдвижных опор крана или нагрузку какого-либо элемента его стрелового оборудования, а функцию, используемую для его вычисления, предварительно определяют с использованием математической модели крана или экспериментальным путем.
В системе безопасности стрелового грузоподъемного крана, реализующей этот способ и содержащей датчики параметров работы крана, исполнительное устройство и соединенный с ним цифровой вычислитель, выполненный с возможностью приема и обработки выходных сигналов датчиков и формирования предупредительных сигналов и сигналов управления исполнительным устройством, эти технические результаты достигаются тем, что цифровой вычислитель выполнен с возможностью вычисления текущих значений параметра, характеризующего нагрузку крана, с использованием выходных сигналов датчика давления в гидроцилиндре подъема стрелы, датчика угла наклона стрелы, а также датчика усилия в грузовом канате или давления в гидроцилиндре телескопирования стрелы.
Во втором варианте предложенного способа повышения безопасности работы крана путем предварительного определения или задания допустимых значений параметров, характеризующих нагрузку и пространственное положение его стрелы или грузозахватного органа, определения в процессе работы крана их текущих значений путем вычислений с использование результатов прямого и/или косвенного измерения других параметров работы крана, последующего сравнения вычисленных значений с допустимыми и формирования, в зависимости от результатов этих сравнений, предупредительных сигналов и/или сигналов управления исполнительным устройством крана указанные технические результаты достигаются за счет того, что указанные вычисления осуществляют с использованием текущего значения длины стрелы, которое измеряют косвенным методом на основании результатов измерений других параметров работы крана.
При этом косвенное измерение длины стрелы L осуществляют путем ее вычисления на основании результатов измерений давления в гидроцилиндре подъема стрелы и угла наклона стрелы α в тех интервалах времени, в течение которых отсутствует нагрузка на грузозахватном органе, либо на основании результатов измерения центробежного ускорения последней выдвижной секции стрелы, угла наклона α и угловой скорости стрелы ω в тех интервалах времени, в течение которых происходит поворот стрелы вследствие ее подъема/опускания или поворота крановой платформы.
В последнем случае длину стрелы L вычисляют по формуле L=(U- gSinα)ω2, где U - выходной сигнал акселерометра, ось чувствительности которого параллельна оси стрелы; а g - ускорение свободного падения.
Для достижения указанных технических результатов угловая скорость стрелы ω, обусловленная подъемом или опусканием стрелы, может определяться путем дифференцирования сигнала датчика угла наклона стрелы или с помощью гироскопического устройства, выполненного в виде гиротахометра или вибрационного гироскопа, прикрепленного к стреле крана. Угловая скорость стрелы ω, обусловленная поворотом крановой платформы, может определяться путем дифференцирования сигнала датчика угла азимута поворотной платформы крана, либо с помощью аналогичного гироскопического устройства, прикрепленного к стреле или к поворотной платформе крана.
Косвенное измерение длины стрелы L может осуществляться также путем ее вычисления, в частности, по формулам L=ΔR/(Cosαl-Cosα2) или L=ΔR/(ΔαSinα), на основании результатов измерения изменения угла наклона стрелы (Δα=α1-α2) и соответствующего ему изменения вылета ΔR, которое определяют путем интегрирования выходного сигнала акселерометра, расположенного на последней выдвижной секции стрелы, в тех интервалах времени, в течение которых осуществляется изменение угла наклона стрелы α.
При этом дополнительно может осуществляться контроль телескопирования стрелы с последующей коррекцией результата вычисления длины стрелы в зависимости от скорости, ускорения или перемещения последней выдвижной секции стрелы вдоль ее оси, которую/которое определяют путем измерения скорости работы привода телескопирования стрелы или при помощи акселерометра, закрепленного на этой секции стрелы.
В системе безопасности стрелового грузоподъемного крана, реализующей второй вариант предложенного способа, содержащей датчики параметров работы крана, исполнительное устройство и соединенный с ним цифровой вычислитель, выполненный с возможностью приема и обработки выходных сигналов датчиков и определения текущих значений, по меньшей мере, одного параметра, характеризующего нагрузку или пространственное положение его стрелы или грузозахватного органа, сравнения этих текущих значений с предельно допустимыми, а также с возможностью формирования предупредительных сигналов и/или передачи на исполнительное устройство сигналов управления или блокирования движений крана в зависимости от результатов этого сравнения, указанные технические результаты достигаются тем, что цифровой вычислитель выполнен с возможностью вычисления текущего значения длины стрелы с использованием выходных сигналов датчиков других параметров работы крана и с возможностью последующего определения указанного текущего значения параметра, характеризующего нагрузку или пространственное положение стрелы или грузозахватного органа крана, с использованием вычисленного текущего значения длины стрелы.
В состав указанных датчиков параметров работы крана, в общем случае, могут входить датчики давления в гидроцилиндре подъема стрелы, угла наклона стрелы, акселерометр, закрепленный на последней выдвижной секции стрелы, гиротахометр или вибрационный гироскоп, прикрепленный к стреле или к поворотной платформе крана, а также датчики угла азимута, скорости телескопирования стрелы или работы привода телескопирования.
Для достижения указанных технических результатов цифровой вычислитель системы безопасности может быть также выполнен с возможностью вычисления длины стрелы с использованием записанной в его запоминающем устройстве функциональной зависимости этой длины от центробежного ускорения последней выдвижной секции стрелы, измеряемого посредством прикрепленного к ней датчика ускорения, и угловой скорости стрелы, измеряемой посредством гиротахометра или вибрационного гироскопа, или путем дифференцирования выходного сигнала датчика угла азимута.
Система безопасности стрелового грузоподъемного крана с указанными отличительными признаками обеспечивает защиту крана от перегрузки и от столкновений с различными препятствиями при работе в стесненных условиях (координатную защиту) без использования датчика длины стрелы. Благодаря этому исключаются недостатки, присущие известным техническим решениям. Соответственно эти отличительные признаки находятся в прямой причинно-следственной связи с достижением технического результата данного изобретения.
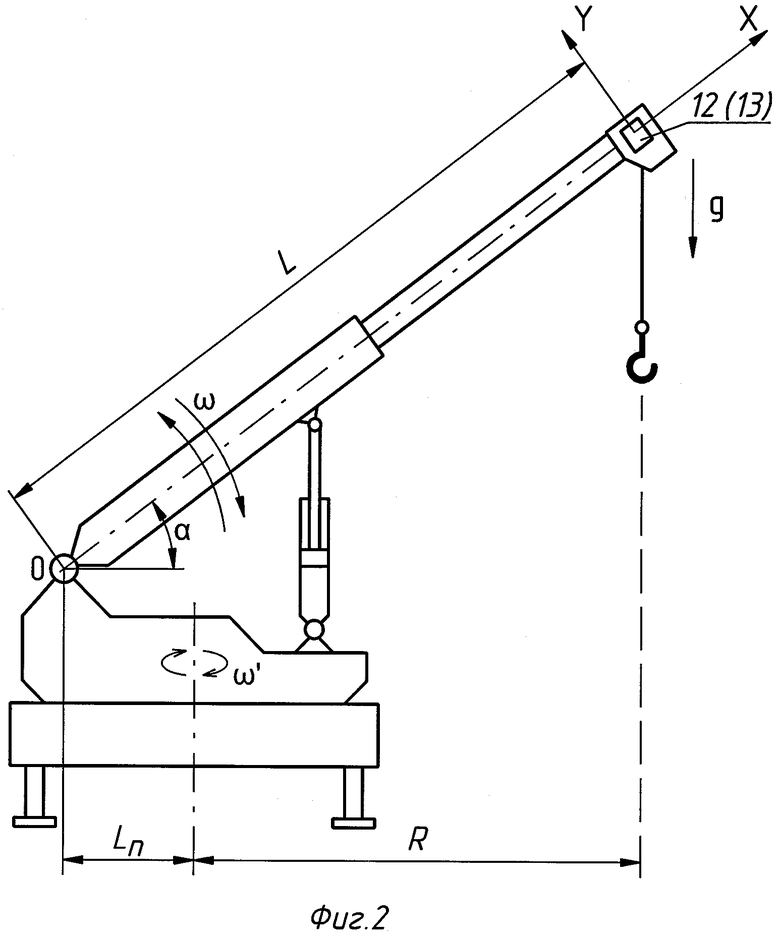
На фиг.1 в качестве примера приведена одна из возможных функциональных схем системы безопасности грузоподъемного крана. На фиг.2 - чертеж стрелы крана, поясняющий метод косвенного измерения ее длины.
Система содержит цифровой вычислитель 1, именуемый также электронным блоком, контроллером, блоком индикации, блоком обработки данных и т.п., и датчики параметров работы грузоподъемного крана 2 (фиг.1).
Цифровой вычислитель 1 выполнен на основе микроконтроллера 3, к которому подключены органы управления вычислителем (кнопки, клавиши) 4, индикаторы (светодиодные, символьные жидкокристаллические, акустические и т.п.) 5, энергонезависимое запоминающее устройство (микросхемы Flash-памяти) 6 и устройство ввода/вывода информации 7.
В случае применения в системе датчиков 2 с аналоговыми выходами устройство ввода/вывода информации 7 содержит аналого-цифровой преобразователь, а при применении цифровых датчиков - трансивер или контроллер мультиплексного канала обмена данными, в частности последовательного интерфейса типа CAN (Control Area Network) или LIN (Local Interconnection Network). Возможно также подключение датчиков 2 с использованием в устройстве ввода/вывода информации 7 беспроводного интерфейса (ZigBee, Bluetooth, Wi-Fi и т.д.).
Выходное устройство 8 выполнено, в частности, в виде силового электронного блока с дискретными, пропорциональными или широтно-импульсными выходными сигналами. Его вход или двунаправленные входы/выходы подключены к устройству ввода/вывода информации 7 при помощи отдельных проводов или мультиплексного канала обмена данными. Выходное устройство 8 может быть выполнено на основе микроконтроллера и подключено к этому мультиплексному каналу обмена данными аналогично подключению датчиков 2. Кроме того, отдельные датчики 2, включая концевые выключатели и датчики аналоговых параметров, могут быть подключены непосредственно к выходному устройству 8.
Выходное устройство 8 может содержать электромагнитные пускатели или электромагнитные клапаны, включенные в гидравлическую или электрическую систему управления краном.
Датчики 2 включают в себя, в частности, датчик давления в гидроцилиндре подъема стрелы 10, датчик угла наклона стрелы 11, акселерометр 12, установленные на последней выдвижной секции стрелы, и гироскоп 13, установленный на этой секции или на поворотной платформе крана.
Система может содержать также различные дополнительные датчики 14, к которым относятся датчик угла азимута, датчик давления в гидроцилиндре привода телескопирования стрелы или датчик скорости этого привода, датчик предельного подъема грузозахватного органа (концевой выключатель), датчик усилия в грузовом или стреловом канате, датчик приближения к линии электропередачи, датчики перемещений органов управления краном, датчик скорости ветра и т.п. Отдельные датчики, показанные на фиг.1, могут отсутствовать. Конкретный набор датчиков зависит от конструкции грузоподъемного крана и варианта реализации системы безопасности.
Управление (пуск, остановка и/или регулирование скорости) приводами исполнительных механизмов крана 15 осуществляется с помощью органов управления грузоподъемным краном 16, воздействующих на приводы исполнительных механизмов крана 15 непосредственно (ручное управление) или через цифровой вычислитель 1 (автоматизированное управление).
Система безопасности работает следующим образом.
Перед началом работы крана крановщик (оператор) при помощи органов управления 4 цифровым вычислителем 1 вводит в микроконтроллер 3 параметры, определяющие режимы работа крана - положение выдвижных опор, кратность запасовки грузового полиспаста, наличие, длину и угол наклона гуська и т.д., если для данной конструкции крана ввод этих параметров является необходимым. Введенные параметры сохраняются в энергонезависимом запоминающем устройстве 6 или в памяти (в EEPROM) микроконтроллера 3.
Зона допустимых значений положения стрелового оборудования крана вводится крановщиком при задании параметров координатной защиты при помощи органов управления 4 и также сохраняется в памяти микроконтроллера 3 или в запоминающем устройстве 6. В этой же памяти хранятся предельно допустимые значения параметров, характеризующих нагрузку крана и представленных, например, в виде его грузовых характеристик.
Инициирование управления приводами 15 крана осуществляется путем перемещения крановщиком органов управления (рукояток, рычагов и т.п.) 16, например электрических джойстиков, в соответствующих направлениях. Уровни сигналов управления приводами 15 либо определяются микроконтроллером 3, либо формируются путем ограничений управляющих воздействий оператора на органы управления краном 16.
Микроконтроллер 3 работает по программе, записанной в его памяти или в запоминающем устройстве 6, и через устройство ввода/вывода информации 7 по мультиплексному каналу обмена данными или по отдельным линиям связи получает от датчиков 2 значения параметров работы крана. На основании этих значений микроконтроллер 3 определяет пространственное положение механизмов и нагрузку крана. Для определения текущих значений параметров, характеризующих нагрузку крана и/или текущее положения его стрелы или грузозахватного органа, в общем случае используется математическая модель крана, записанная в памяти микроконтроллера 3 или в запоминающем устройстве 6.
Далее микроконтроллер 2 осуществляет сравнение текущих значений параметров, характеризующих нагрузку и пространственное положение стрелы или грузозахватного органа крана, с допустимыми значениями этих параметров и формирует, в зависимости от результатов этого сравнения, предупредительные сигналы для крановщика, поступающие на индикаторы 5, а также сигналы управления или блокирования управления приводами исполнительных механизмов крана 15, обеспечивающие предотвращение превышения допустимых значений этих параметров. Благодаря этому осуществляется защита крана от перегрузки и от столкновений с препятствиями (координатная защита).
При вычислении текущего значения параметра, характеризующего нагрузку крана (грузового момента, веса поднимаемого груза, нагрузки выдвижных опор крана или нагрузки какого-либо элемента его стрелового оборудования), этот параметр в первом варианте системы безопасности представлен в виде функции давления в гидроцилиндре подъема стрелы и угла наклона стрелы. Поскольку его значение зависит от положения центра тяжести стрелы с грузом, для повышения точности определения этого параметра в качестве третьего аргумента этой функции используется усилие в грузовом канате или давление в гидроцилиндре телескопирования стрелы, измеряемое с помощью соответствующего датчика 14. Указанная функция определяется расчетным или экспериментальным путем и предварительно записывается в запоминающее устройство 6.
Во втором варианте реализации предложенного способа для определения текущих значений параметров, характеризующих нагрузку крана и пространственное положение его стрелы или грузозахватного органа, микроконтроллер 3 использует информацию о длине телескопируемой стрелы. Поскольку датчик длины стрелы в системе безопасности не используется, эта длина вычисляется микроконтроллером 3 на основании выходных сигналов датчиков других параметров работы крана 2.
Для этого может быть использовано то обстоятельство, что при отсутствии нагрузки на грузозахватном органе, например при подводе грузозахватного органа к грузу из транспортного положения или после выполнения разгрузки, и фиксированном угле наклона стрелы величина давления в гидроцилиндре подъема стрелы однозначно определяется длиной стрелы. Функциональная зависимость длины стрелы от угла ее наклона и давления в гидроцилиндре подъема стрелы также предварительно определяется, например, расчетным путем с использованием математической модели крана и записывается в запоминающее устройство 6.
Другой вариант вычисления длины стрелы базируется на измерении центробежного ускорения последней выдвижной секции стрелы с помощью установленного на ней акселерометра (фиг.2).
Если телескопирование стрелы отсутствует, то при подъеме/опускании стрелы или при повороте крановой платформы акселерометр движется по дуге окружности с центром в точке О. Центробежное ускорение, измеряемое акселерометром 12, ось чувствительности Х которого направлена вдоль стрелы (фиг.2), определяется по формуле al=ω2L, где L - длина стрелы (радиус поворота), а ω - угловая скорость поворота стрелы (угловая скорость подъема/опускания стрелы ω или поворота платформы ω').
На акселерометр 2 по оси Х действует также статическая составляющая ускорения свободного падения g: а2=gSinα.
Поскольку выходной сигнал акселерометра U определяется суммой ускорений al+а2, длину стрелы L микроконтроллер 3 вычисляет по формуле L=(U-gSinα)/ω2.
При этом угловая скорости стрелы ω или ω' измеряется путем дифференцирования выходного сигнала датчика угла наклона стрелы α или датчика угла азимута, либо с помощью гироскопа 13, установленного на стреле или на поворотной платформе крана и выполненного в виде гиротахометра или вибрационного гироскопа, принцип действия которого базируется на измерении сил Кориолиса.
Если при этом осуществляется телескопирование стрелы, то при вычислении микроконтроллером 3 длины стрелы по указанной формуле дополнительно вводится поправка, зависящая от скорости, ускорения или линейного перемещения последней выдвижной секции стрелы вдоль ее ости. Эта поправка вычисляется микроконтроллером 3 с использованием выходного сигнала датчика скорости работы привода телескопирования стрелы или дополнительного акселерометра.
Длина стрелы может быть вычислена микроконтроллером 3 также в процессе ее подъема/опускания путем контроля изменения вылета ΔR и соответствующего ему изменения угла наклона стрелы (Δα=α1-α2) по формуле L=ΔR/(Cosα1-Cosα2). При малой величине Δα может быть использована упрощенная формула L=/(ΔαSinα).
Изменение вылета ΔR при этом может быть определено путем путем преобразования и интегрирования сигнала акселерометра 12. В этом случае используется двухосевой X, Y акселерометр 12 (фиг.2), а интегрированию с целью определения величины ΔR, осуществляемому микроконтроллером 3, подвергается горизонтальная составляющая ускорения с исключением из нее центробежного ускорения ω2L.
Для документирования работы крана система может содержать встроенный или внешний регистратор параметров, реализованный на основе запоминающего устройства 6, в который микроконтроллер 3 записывает значения параметров работы крана (нагрузки, пространственного положения стрелы и т.п.), предупреждающих сигналов и сигналов управления краном с целью их последующего считывания для анализа на ЭВМ для оценки эффективности использования крана, контроля соблюдения установленных правил его эксплуатации и для расследования причин возможных отказов и аварий.
В данном описании схематично приведены лишь частные варианты реализации предложенной системы безопасности грузоподъемного крана. Изобретение охватывает ее другие возможные варианты исполнения и их эквиваленты без отступления от сущности изобретения, изложенной в его формуле.
Источники информации
1. SU 1654256 A1, B66C 23/90, 07.06.1991.
2. US 5730305 A, B66C 13/16, 13/18, 24.03.1998.
3. RU 2282577 C2, B66C 23/88, 15/00, 27.08.2006.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ повышения безопасности и система безопасности стрелового грузоподъемного крана | 2018 |
|
RU2700312C1 |
| СПОСОБ НАСТРОЙКИ ЭЛЕКТРОННОГО УСТРОЙСТВА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И ЭЛЕКТРОННОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ С ЕГО РЕАЛИЗАЦИЕЙ | 2006 |
|
RU2326803C2 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И РЕАЛИЗУЮЩИЙ ЕГО ПРИБОР БЕЗОПАСНОСТИ | 2005 |
|
RU2307061C1 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2290361C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫЛЕТА В УСТРОЙСТВЕ БЕЗОПАСНОСТИ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271986C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ АВАРИЙ ПРИ РАБОТЕ ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2306255C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА НА ГИБКОМ ПОДВЕСЕ (ВАРИАНТЫ) | 2009 |
|
RU2406679C2 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2006 |
|
RU2322382C1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ СТРЕЛОВОГО КРАНА | 2009 |
|
RU2391285C1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2006 |
|
RU2335451C1 |
Изобретение относится к вариантам способа повышения безопасности и вариантам системы безопасности стрелового грузоподъемного крана. Способ повышения безопасности работы стрелового грузоподъемного крана заключается в предварительном определении или задании допустимого значения параметра, характеризующего нагрузку крана, и его запоминании. Определение в процессе работы крана текущего значения этого параметра путем его вычисления с использованием результатов прямого и/или косвенного измерения других параметров работы крана. Сравнение текущего значения этого параметра с допустимым и формирование в зависимости от результатов этого сравнения предупредительных сигналов и/или сигналов управления или блокирования управления, по меньшей мере, одним исполнительным устройством крана, направленных на предотвращение превышения этим параметром допустимого значения. Согласно первому варианту способа определяют текущее значение параметра, характеризующего нагрузку крана, и представляют его в виде функции, по меньшей мере, трех аргументов. В качестве первого входного аргумента принимают давление в гидроцилиндре подъема стрелы. В качестве второго аргумента принимают угол наклона стрелы, а в качестве третьего аргумента используют усилие в грузовом канате или давление в гидроцилиндре телескопирования стрелы. Согласно второму варианту способа осуществляют вычисление с использованием текущего значения длины стрелы, которое измеряют косвенным методом на основании результатов измерений других параметров работы крана. Первый вариант системы содержит датчики давления в гидроцилиндре подъема стрелы, датчик угла наклона стрелы, а также датчик усилия в грузовом канате или давления в гидроцилиндре телескопирования стрелы. Цифровой вычислитель выполнен с возможностью вычисления текущего значения параметра, характеризующего нагрузку крана с использованием выходных сигналов, по меньшей мере, трех указанных датчиков. Второй вариант системы содержит цифровой вычислитель, который выполнен с возможностью вычисления текущего значения длины стрелы с использованием выходных сигналов других параметров работы крана и с возможностью последующего определения указанного текущего значения параметра, характеризующего нагрузку или пространственное положение стрелы или грузозахватного органа крана, с использованием вычисленного значения этой длины. Достигается повышение надежности и упрощение конструкции системы безопасности. 4 н. и 12 з.п. ф-лы, 2 ил.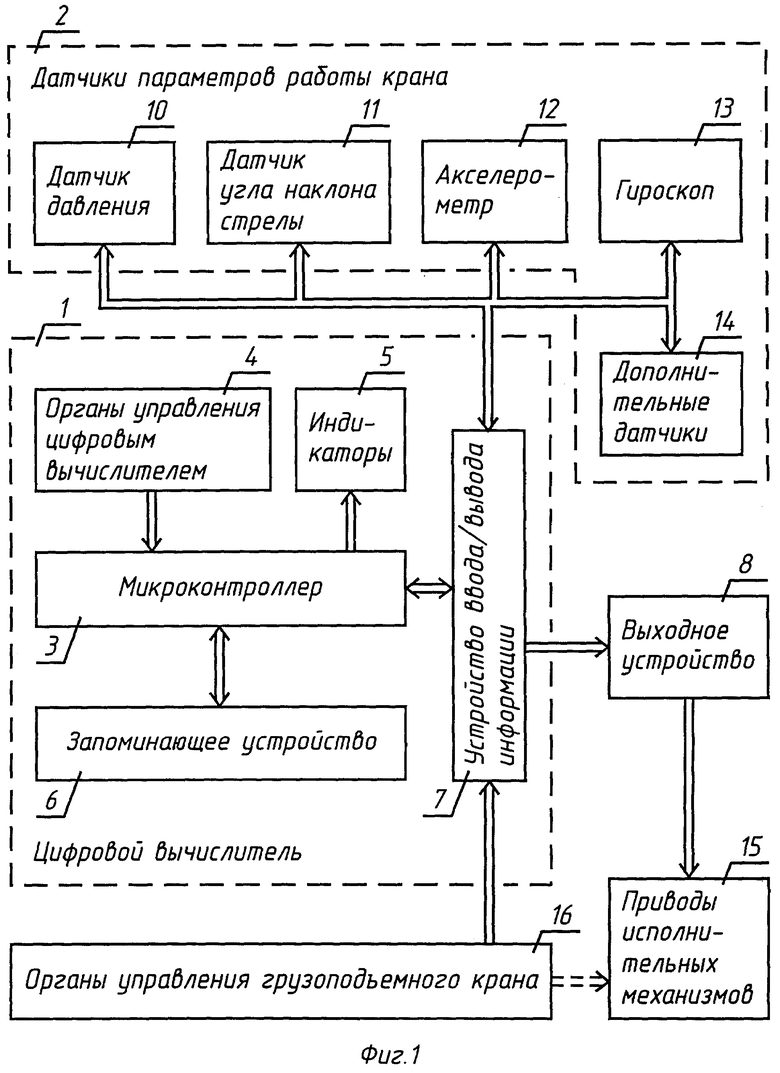
1. Способ повышения безопасности стрелового грузоподъемного крана путем предварительного определения или задания допустимого значения параметра, характеризующего нагрузку крана, его запоминания, определения в процессе работы крана текущего значения этого параметра путем его вычисления с использованием результатов прямого и/или косвенного измерения других параметров работы крана, последующего сравнения его текущего значения с допустимым и формирования в зависимости от результатов этого сравнения предупредительных сигналов и/или сигналов управления или блокирования управления, по меньшей мере, одним исполнительным устройством крана, направленных на предотвращение превышения этим параметром допустимого значения, отличающийся тем, что при определении текущего значения параметра, характеризующего нагрузку крана, его представляют в виде функции, по меньшей мере, трех аргументов, причем первым входным аргументом принимают давление в гидроцилиндре подъема стрелы, вторым аргументом принимают угол наклона стрелы, а в качестве третьего аргумента используют усилие в грузовом канате или давление в гидроцилиндре телескопирования стрелы.
2. Способ по п.1, отличающийся тем, что за параметр, характеризующий нагрузку крана, принимают грузовой момент крана, или вес поднимаемого груза, или нагрузку выдвижных опор крана, или нагрузку какого-либо элемента его стрелового оборудования, а функцию, используемую для его вычисления, предварительно определяют с использованием математической модели крана или экспериментальным путем.
3. Система безопасности стрелового грузоподъемного крана, содержащая датчики параметров работы крана, исполнительное устройство и соединенный с ним цифровой вычислитель, выполненный с возможностью приема и обработки выходных сигналов датчиков и определения текущих значений, по меньшей мере, одного параметра, характеризующего нагрузку крана, сравнения этих текущих значений с предельно допустимым, предварительно записанным в его запоминающее устройство, а также с возможностью формирования предупредительных сигналов и/или передачи на исполнительное устройство сигналов управления или блокирования движений крана, направленных на предотвращение превышения этим параметром его предельно допустимого значения, отличающаяся тем, что в состав датчиков параметров работы крана входят датчик давления в гидроцилиндре подъема стрелы, датчик угла наклона стрелы, а также датчик усилия в грузовом канате или давления в гидроцилиндре телескопирования стрелы, а цифровой вычислитель выполнен с возможностью вычисления текущих значений параметра, характеризующего нагрузку крана, с использованием выходных сигналов, по меньшей мере, трех из указанных датчиков.
4. Способ повышения безопасности работы стрелового грузоподъемного крана путем предварительного определения или задания допустимого значения, по меньшей мере, одного параметра, характеризующего нагрузку или пространственное положение стрелы или грузозахватного органа крана, его запоминания, определения в процессе работы крана текущего значения этого параметра путем его вычисления с использованием результатов прямого и/или косвенного измерения других параметров работы крана, последующего сравнения его текущего значения с допустимым и формирования в зависимости от результатов этого сравнения предупредительных сигналов и/или сигналов управления или блокирования управления, по меньшей мере, одним исполнительным устройством крана, направленных на предотвращение превышения этим параметром его допустимого значения, отличающийся тем, что указанное вычисление осуществляют с использованием текущего значения длины стрелы, которое измеряют косвенным методом на основании результатов измерений других параметров работы крана.
5. Способ по п.4, отличающийся тем, что дополнительно выявляют интервал времени, в течение которого отсутствует нагрузка на грузозахватном органе, и в этот момент времени осуществляют косвенное измерение длины стрелы путем ее вычисления на основании результатов измерений давления в гидроцилиндре подъема стрелы и угла наклона стрелы.
6. Способ по п.4, отличающийся тем, что дополнительно выявляют интервал времени, в течение которого осуществляется изменение угла наклона или поворот стрелы, и в этот момент времени осуществляют косвенное измерение длины L стрелы путем ее вычисления на основании результатов измерения центробежного ускорения последней выдвижной секции стрелы, угла наклона α и угловой скорости ω стрелы.
7. Способ по п.6, отличающийся тем, что длину L стрелы вычисляют по формуле L=(U-gSinα)/ω2,
где U - выходной сигнал акселерометра, ось чувствительности которого параллельна оси стрелы; g - ускорение свободного падения.
8. Способ по п.6, отличающийся тем, что угловую скорость ω стрелы, обусловленную подъемом или опусканием стрелы, определяют путем дифференцирования сигнала датчика угла наклона α стрелы или с помощью гироскопического устройства, приспособленного для определения угловой скорости и выполненного в виде гиротахометра или вибрационного гироскопа, прикрепленного к стреле.
9. Способ по п.6, отличающийся тем, что угловую скорость ω стрелы, обусловленную поворотом крановой платформы, определяют путем дифференцирования сигнала датчика угла азимута поворотной платформы крана или с помощью гироскопического устройства, приспособленного для определения угловой скорости и выполненного в виде гиротахометра или вибрационного гироскопа, прикрепленного к стреле или к поворотной платформе крана.
10. Способ по п.6, отличающийся тем, что дополнительно осуществляют контроль телескопирования стрелы и при его наличии вычисление длины стрелы осуществляют с учетом скорости или ускорения, или перемещения последней выдвижной секции стрелы вдоль ее оси, которую/которое определяют путем измерения скорости работы привода телескопирования стрелы или посредством акселерометра, закрепленного на этой секции стрелы.
11. Способ по п.4, отличающийся тем, что дополнительно выявляют интервал времени, в течение которого осуществляется изменение угла наклона α стрелы, и в этот момент времени осуществляют вычисление длины стрелы на основании результатов измерения изменения угла ее наклона (Δα=α1-α2) и соответствующего ему изменения вылета ΔR, которое определяют путем интегрирования выходного сигнала акселерометра, расположенного на последней выдвижной секции стрелы.
12. Способ по п.11, отличающийся тем, что длину L стрелы вычисляют по формуле: L=ΔR/(Cosα1-Cosα2), или по формуле: L=ΔR/(ΔαSinα).
13. Способ по п.11, отличающийся тем, что дополнительно осуществляют контроль телескопирования стрелы и при его наличии вычисление длины стрелы осуществляют с учетом перемещения последней выдвижной секции стрелы вдоль ее оси, которое определяют путем измерения скорости работы привода телескопирования стрелы или посредством акселерометра, закрепленного на этой секции стрелы.
14. Система безопасности стрелового грузоподъемного крана, содержащая датчики параметров работы крана, исполнительное устройство и соединенный с ним цифровой вычислитель, выполненный с возможностью приема и обработки выходных сигналов датчиков и определения текущих значений, по меньшей мере, одного параметра, характеризующего нагрузку или пространственное положение его стрелы или грузозахватного органа, сравнения этих текущих значений с предельно допустимым, предварительно записанным в его запоминающее устройство, а также с возможностью формирования предупредительных сигналов и/или передачи на исполнительное устройство сигналов управления или блокирования движений крана, направленных на предотвращение превышения этим параметром его предельно допустимого значения, отличающаяся тем, что цифровой вычислитель выполнен с возможностью вычисления текущего значения длины стрелы с использованием выходных сигналов датчиков других параметров работы крана и с возможностью последующего определения указанного текущего значения параметра, характеризующего нагрузку или пространственное положение стрелы или грузозахватного органа крана с использованием вычисленного значения этой длины.
15. Система безопасности по п.14, отличающаяся тем, что состав датчиков параметров работы крана входят датчик давления в гидроцилиндре подъема стрелы, и/или датчик угла наклона стрелы, и/или акселерометр, закрепленный на последней выдвижной секции стрелы, и/или гироскопический датчик, выполненный в виде гиротахометра или вибрационного гироскопа с возможностью определения угловой скорости и прикрепленный к стреле или к поворотной платформе крана, и/или датчик угла азимута, и/или датчик скорости телескопирования стрелы или скорости работы привода телескопирования.
16. Система безопасности по п.14 или 15, отличающаяся тем, что цифровой вычислитель выполнен с возможностью вычисления длины стрелы с использованием записанной в его запоминающем устройстве функциональной зависимости этой длины от центробежного ускорения последней выдвижной секции стрелы, измеряемого посредством прикрепленного к ней датчика ускорения, и угловой скорости стрелы, измеряемой посредством гиротахометра или вибрационного гироскопа, или путем дифференцирования выходного сигнала датчика угла азимута или датчика угла наклона стрелы.
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2005 |
|
RU2282577C2 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАНОВКИ КАМЕРНОГО ПЕРЕГРЕВАТЕЛЯ В ПАРОВОЗНЫХ, ЛОКОМОБИЛЬНЫХ И Т. П. КОТЛАХ | 1926 |
|
SU7097A1 |
| Противопригарное покрытие для литейных форм и стержней | 1978 |
|
SU667315A1 |

