Настоящее изобретение касается устройства и способа соединения ориентируемых объектов.
Пассажирский самолет содержит целый комплекс трубопроводов, служащих для подачи газа или жидкостей, например для охлаждения двигателей, подачи топлива, для систем гидравлического торможения и т.д. Элементы, входящие в состав системы трубопроводов, должны иметь формы, соответствующие контурам самолета, и быть адаптированными к работе под высоким давлением.
Соединение таких элементов требует изготовления в каждом случае макета узла соединения трубопроводной системы. Каждое последующее изменение трехмерной геометрии такого узла требует изготовления нового макета монтажного соединения. Так как время разработки нового самолета или нового технического решения имеет тенденцию к сокращению, то это делает невозможным сопоставление времени изготовления новой технологической оснастки со временем изготовления самого трубопроводного узла.
Кроме того, новые авиационные программы способствуют использованию ориентированных соединений, что позволяет предсказать значительный рост как стоимости соединительных макетов и их хранения, так и производственных площадей для их размещения.
Объектом настоящего изобретения являются способ и устройство соединения ориентируемых объектов, таких как отрезки трубопроводов, простые по концепции и способу работы, экономичные и позволяющие соединять, по меньшей мере, два объекта, ориентированных один относительно другого по любой геометрии соединения.
Задачей настоящего изобретения является упрощение операций соединения в пространстве ориентируемых объектов.
В соответствии с изобретением устройство содержит:
- средства вращательного перемещения вокруг оси вращения первой и второй поворотных плит, при этом первая поворотная плита имеет первую главную ось, перпендикулярную оси вращения, и содержит первые средства для удержания объектов, выполненные с возможностью поступательного перемещения вдоль первой главной оси, вторая поворотная плита имеет вторую главную ось, перпендикулярную оси вращения, и содержит вторые средства для удержания объектов, а также суппорт для удержания и угловой ориентации одного из соединяемых объектов,
- суппорт поступательно подвижен относительно вторых средств для удержания объектов вдоль второй главной оси,
- средства визуализации угла поворота суппорта и положения второй поворотной плиты.
В различных вариантах исполнения устройства для соединения ориентируемых объектов каждый имеет свои преимущества и возможности многих технических комбинаций:
- суппорт имеет т-образный паз для удержания центрирующего элемента,
- центрирующий элемент имеет аксиальное отверстие, параллельное плоскости суппорта, а также средства фиксации для приема переходника одного из соединяемых объектов,
- первые средства удержания выполнены с возможностью поворота на оси, перпендикулярной первой главной оси, а также с возможностью перемещения вдоль этой перпендикулярной оси, а вторые средства удержания выполнены подвижными вдоль перпендикулярной оси второй главной оси,
- суппорт содержит средства привода во вращение,
- средства привода содержат шаговый двигатель и червячную передачу,
- вторые средства удержания содержат первую неподвижную ограничительную стенку с прорезью для приема объекта, вторую неподвижную стенку, параллельную первой и размещенную на расстоянии от первой, при этом вторая стенка установлена с возможностью продольного перемещения вдоль оси, перпендикулярной второй главной оси,
- средства вращательного перемещения первой и второй поворотных плит содержат градуированный диск, ось вращения которого перпендикулярна его поверхности и проходит через его центр,
- устройство содержит станину с плоской поверхностью, содержащей сеть отверстий, а также третьи средства удержания объектов, при этом диск установлен на удлинении станины,
- средства визуализации содержат шифратор, связанный со средствами привода во вращение суппорта, а также индикатор.
Изобретение относится также к способу соединения ориентируемых объектов типа трубопроводов.
В соответствии с изобретением
- определяют эталонную плоскость соединения и плоскость ориентации, нормальные одна относительно другой, затем следуют этапы:
- а) помещают в эталонную плоскость первую точку первого объекта для соединения на первых средствах удержания и вторую точку, близкую к краю первого объекта на вторых средствах удержания, при этом первый объект находится между двумя точками в эталонной плоскости соединения,
- б) устанавливают второй соединяемый объект на суппорт и перемещают его для ориентации второго объекта относительно плоскости ориентации, а на эталонной плоскости находится ось второго объекта,
- в) определяют зону соединения объектов, продольно перемещая суппорт ко вторым средствам удержания вдоль общей оси, параллельной эталонной плоскости, при этом первые средства удержания, с одной стороны, и вторые средства удержания и суппорт, с другой стороны, установлены с возможностью вращения на одной и той же оси, перпендикулярной эталонной плоскости, а первые средства удержания продольно подвижны вдоль оси, перпендикулярной оси вращения,
- г) соединяют объекты закаткой, сваркой или иным образом,
- далее определяют декартову систему координат (x, y, z), принимая за нулевую точку (0, 0, 0) системы точку центрирования первого соединения,
- повторяют в случае необходимости этапы а), б), в), г) для присоединения нового объекта к заранее полученному соединению, при этом средства визуализации позволяют определить координаты (x, y, z) этих элементов для их ориентации в пространстве относительно геометрии соединения.
В различных вариантах осуществления изобретение обладает также следующими характеристиками, которые можно использовать как по отдельности, так и в возможных технических комбинациях:
- точка центрирования размещена на пересечении плоскостей эталонной и ориентации, причем размещение точки отсчета является таковым, что другая ось второго объекта должна находиться в плоскости ориентации,
- средства визуализации выдают угол поворота суппорта и положения общей оси, связывающей суппорт со вторыми средствами удержания.
Устройство и способ соединения объектов, ориентируемых относительно друг друга, описанные выше, могут использоваться для соединения трубопроводов при строительстве самолетов и кораблей.
Изобретение иллюстрируется чертежами, в числе которых:
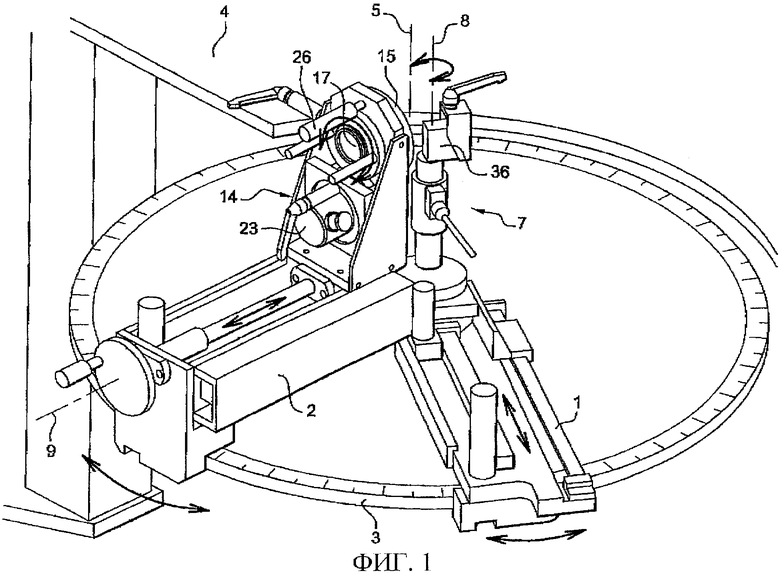
- фиг.1 изображает устройство для соединения ориентируемых объектов по одному из вариантов изобретения;
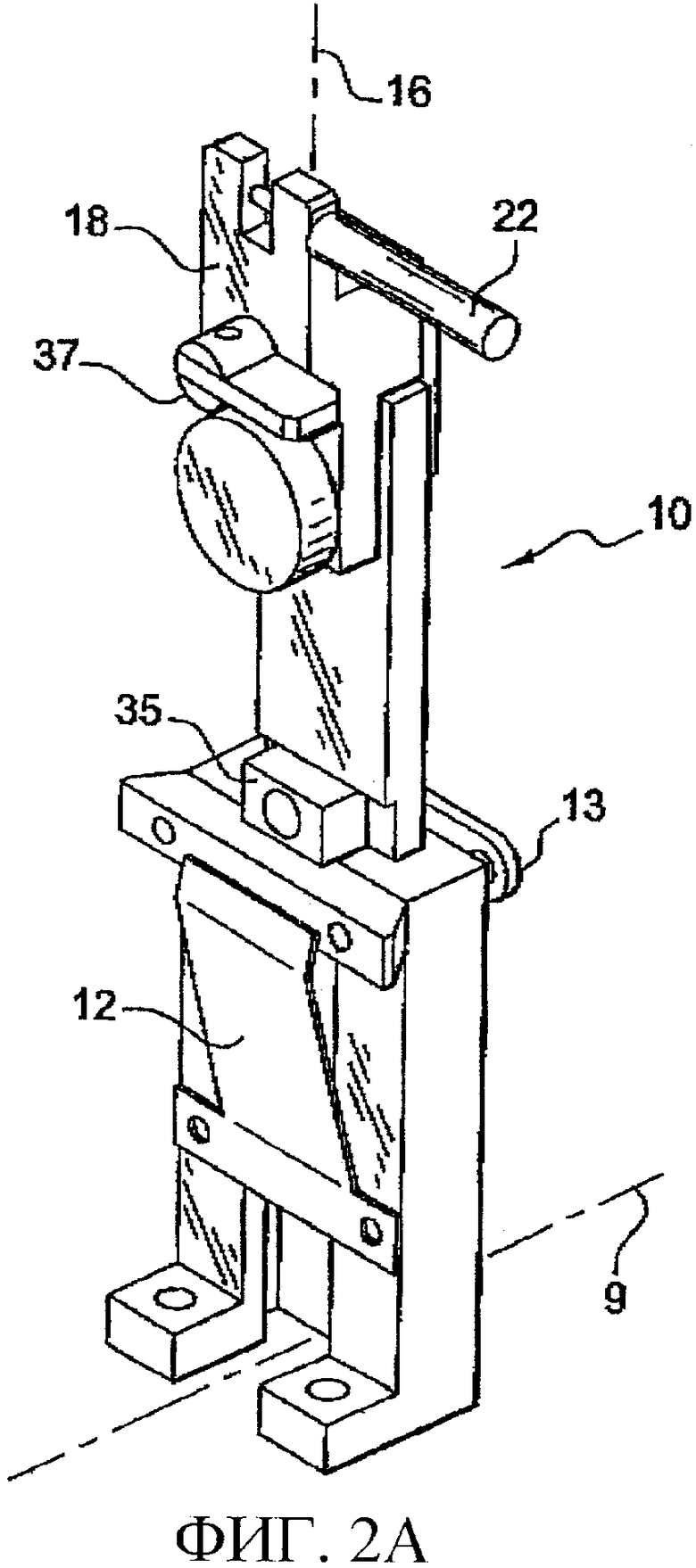
- фиг.2 - вторые средства удержания (фиг.2а) и более подробно верхнюю часть вторых средств удержания с поворотным упором (фиг.2в) согласно варианту осуществления изобретения;
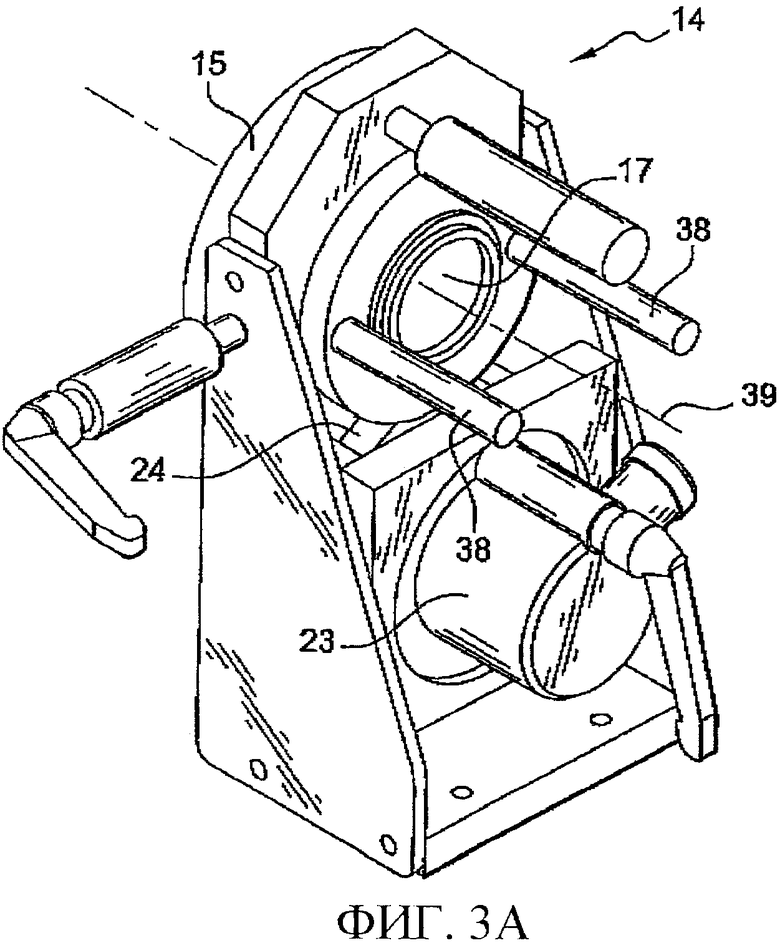
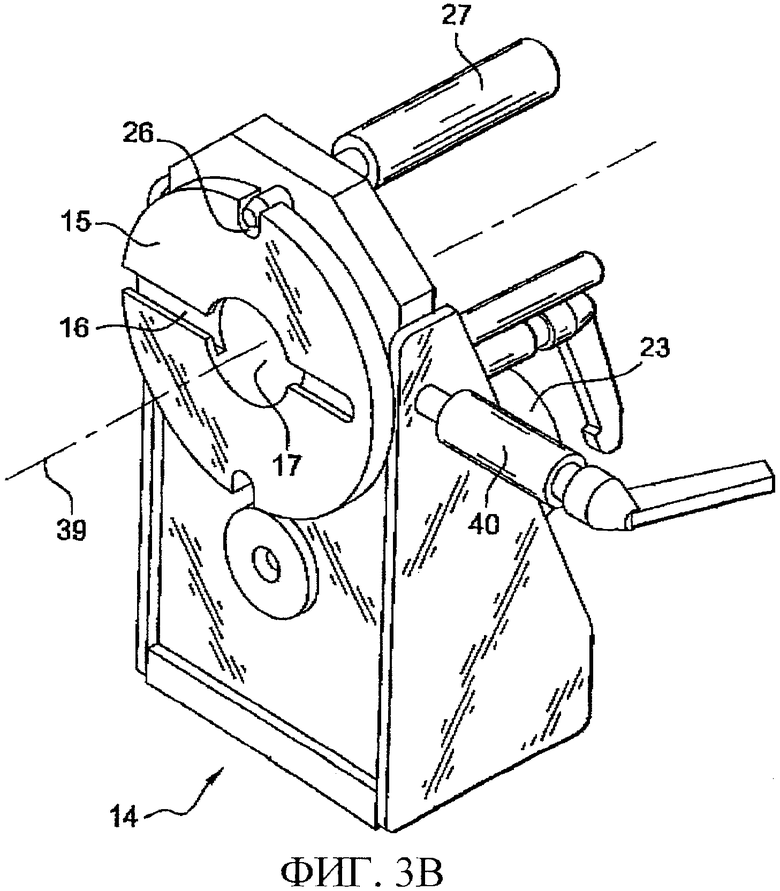
- фиг.3 - суппорт согласно фиг.1, в частности вид сзади (фиг.3а) и вид спереди (фиг.3в);
- фиг.4 - соединение, зафиксированное в декартовой системе координат (x, y, z) согласно одному из вариантов осуществления изобретения.
Фиг.1 иллюстрирует частный случай реализации устройства для соединения ориентируемых объектов. Это устройство содержит средства вращательного перемещения вокруг оси вращения первой 1 и второй 2 поворотных плит. Предпочтительно эти средства перемещения содержат градуированный диск 3, установленный на выполненной с отверстиями станине 4 таким образом, что она является продолжением диска. Ось вращения 5 перпендикулярна поверхности градуированного диска и проходит через его центр. Таким образом, перемещение первой 1 и второй 2 поворотных плит осуществляется поворотом с центром вращения по оси диска 3. На фиг.1 первая и вторая поворотные плиты 1, 2 размещены своими внешними перемещающимися частями на части окружности градуированного диска 3. Диск 3 может иметь кольцевую прорезь меньшего диаметра, но с одним и тем же центром. Эта прорезь может, например, показывать положение края поворотной плиты 1, а край второй поворотной плиты 2 может перемещаться по периметру градуированного диска 3. Средства вращательного перемещения первой и второй плит 1, 2 могут также содержать средства привода во вращение указанных плит 1, 2, например зубчатую передачу и шаговый двигатель с устройством управления.
Первая поворотная плита 1 имеет первую главную ось 6, перпендикулярную оси вращения 5, проходящей через центр градуированного диска 3. Первая главная ось 6 параллельна этому диску 3. Первая поворотная плита 1 содержит первые средства 7 для удержания объектов. Эти средства 7 для удержания объектов подвижны вдоль первой главной оси 6. В предпочтительном варианте они также вращательно подвижны на оси 8, перпендикулярной оси 6, и могут продольно перемещаться по оси 8 для обеспечения свободы ориентации и позиционирования первых средств удержания 7 по отношению к удерживаемому объекту. Первая поворотная плита 1 в частном случае реализации содержит направляющую с первой главной осью 6, на которой в продольном направлении перемещается платформа. На этой платформе закреплена, например, винтами первая цилиндрическая втулка, осью симметрии которой является ось 8, перпендикулярная оси 6. Вторая втулка, пустотелая, по меньшей мере, в некоторой части по высоте и перемещаемая по направлению первой цилиндрической втулки, содержит фиксирующие средства, например блокирующий рычаг для фиксации ее положения вдоль первой втулки. Монолитная часть второй втулки содержит средства захвата 36, например металлический зажим для удержания объекта, например трубы, и жесткой фиксации объекта внутри средства захвата. Устройство захвата может быть выполнено также в виде телескопической мачты, на конце которой размещен захват Средства захвата установлены с возможностью вращения на второй втулке или на конце телескопической мачты.
Вторая поворотная плита 2 размещена по второй главной оси 9, перпендикулярной оси вращения 5 и параллельной градуированному диску 3. Вторая поворотная плита 2 содержит вторые средства удержания 10 объектов, удерживающие, например, крайнюю соединяемую часть первого соединяемого объекта. Вторые средства удержания 10 выполнены предпочтительно подвижными вдоль оси 11, перпендикулярной второй главной оси 9 (фиг.2а). Продольное перемещение вторых средств удержания 10 обеспечивается плоской пружиной 12. Свинчивающее устройство 13 содержит, по меньшей мере, два винта, позволяющие фиксировать положение вторых средств удержания 10. Установочный упор 35 определяет минимальную высоту средств удержания 10.
Вторая поворотная плита содержит также суппорт 14 для удержания и ориентирования углового положения второго соединяемого объекта.
В соответствии с предпочтительным вариантом выполнения, представленным на фиг.3, поворотный фланец 15 содержит т-образную прорезь 16, выполненную с возможностью центрирующего элемента соединяемого объекта. Отверстие 17 в центре поворотного фланца 15 позволяет центрировать второй соединяемый объект и позиционировать его по отношению к концу первого объекта, закрепленного во вторых средствах удержания 10. Центрирующий элемент содержит аксиальное отверстие, параллельное поверхности поворотного фланца 15, и средства фиксации переходника второго объекта. Суппорт 14 продольно подвижен относительно вторых средств удержания 10 вдоль второй главной оси 9. Суппорт может также перемещаться по направляющему элементу второй главной оси 9. Направляющий элемент на фиг.1 выполнен в виде стержня и стенок второй поворотной плиты 2.
Суппорт 14 может содержать средства привода для приведения во вращение поворотного фланца 15. Средства привода содержат, например, шаговый двигатель и червячный редуктор. Средства привода содержат, по меньшей мере, одну рукоятку 38, позволяющую вручную управлять фланцем 15, поворотным на оси вращения 39.
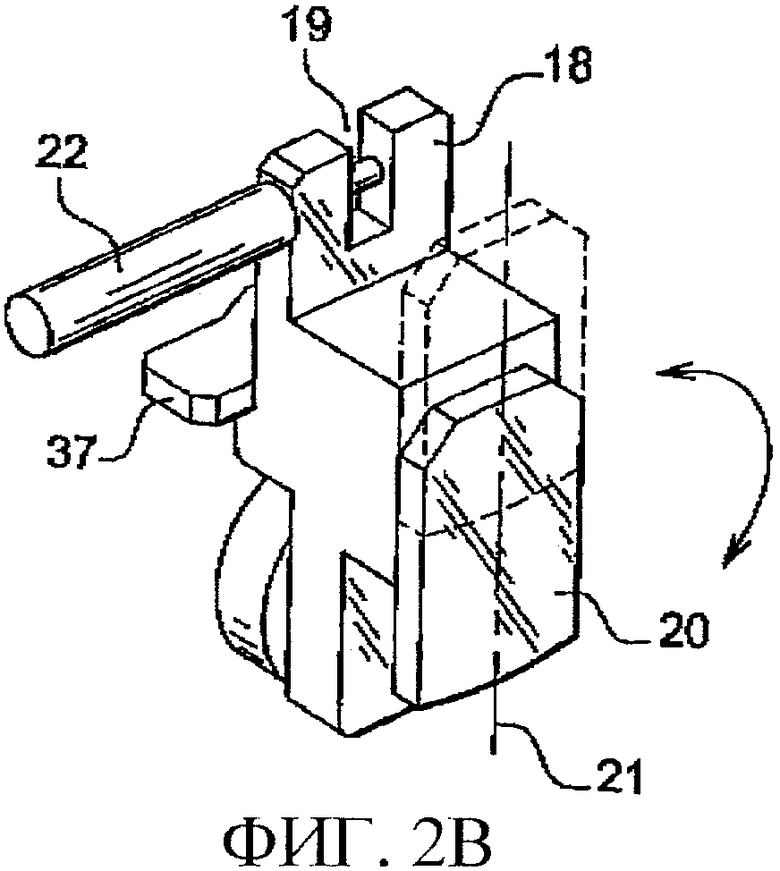
Суппорт 14 взаимодействует со вторыми средствами удержания 10 для определения зоны соединения первого и второго объектов. В соответствии с фиг.2в вторые средства соединения 10 содержат первую неподвижную упорную стенку с прорезью 19 для приема одного из объектов и вторую упорную стенку 20, параллельную первой стенке 18 и расположенную на расстоянии d от последней. Вторая стенка 20 выполнена подвижной вдоль оси 21, перпендикулярной главной оси 9, таким образом, что она может быть поднята (штриховая линия) или опущена (сплошная линия) относительно прорези 19 первой стенки 18. Язычком 37 можно вручную устанавливать верхнее или нижнее положение второй стенки 20. Первый соединяемый объект позиционируют в прорези 19 вторых средств удержания 10 таким образом, что его конец входит в зажим до поднятой второй стенки 20. Затем фиксируют первый объект средствами фиксации 22. Затем опускают вторую стенку 20 в нижнее положение и продольно перемещают суппорт 14 вдоль второй главной оси 9 к вторым средствам удержания 10. Конец первого соединяемого объекта входит в зажим на первой стенке 18 вторых средств удержания 10 с перекрытием конца первого объекта, что определяет, таким образом, зону соединения, например, завальцовкой, на длину d.
Фланец 15 выполнен с возможностью продольного перемещения по оси вращения 39. Рукоятка 40 позволяет блокировать фланец 15 при его движении вдоль оси 39. Эта зафиксированная позиция на оси 39 служит эталонной при позиционировании и соединении объектов. Фланец 15 затем освобождается для осуществления операции соединения, например, завальцовкой, чтобы обеспечить удлинение, вызванное этой завальцовкой.
Устройство для соединения ориентируемых объектов содержит также средства визуализации, по меньшей мере, угла поворота суппорта и второй поворотной плиты. Эти средства содержат, например, шифратор 23, сочлененный со средствами привода во вращение фланца 15 и индикатором. Связь между цифровым шифратором 23 и средствами привода во вращение может быть обеспечена посредством зубчатой передачи 24 (фиг.3а). Прорезь 25 во фланце 15 благодаря индикаторному пальцу 26 позволяет обнулять цифровой шифратор 23 (фиг 3b).
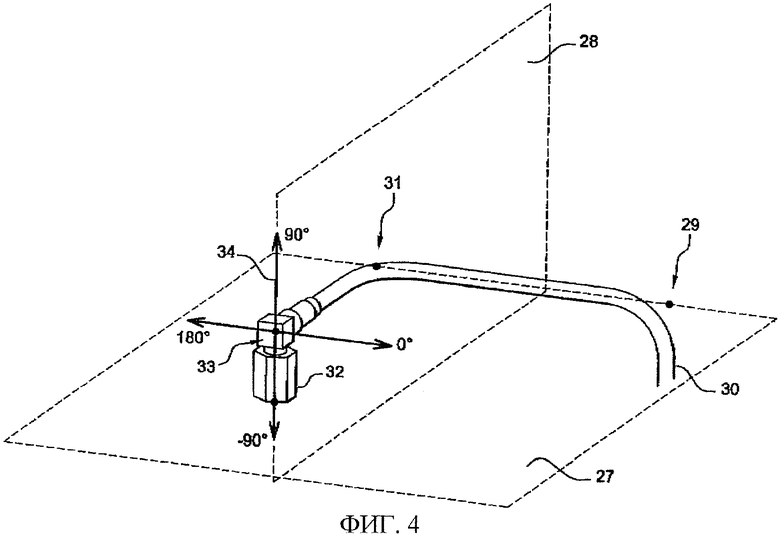
Изобретение касается также способа соединения ориентируемых объектов, таких как детали трубопроводов. Вначале определяют эталонную плоскость 27 соединения и плоскость ориентации 28, при этом обе плоскости 27 и 28 перпендикулярны одна другой. Затем осуществляют следующие этапы:
а) на эталонную плоскость 27 помещают первую точку 29 первого объекта для соединения 30, сочлененного со средствами удержания 7, а также вторую точку 31, близкую к концу первого объекта 30, находящемуся во вторых средствах удержания 10, при этом первый объект 30 находится между двумя точками 29, 30 эталонной плоскости 27 соединения,
б) монтируют второй соединяемый объект 32 в суппорте 14 и перемещают под углом фланец 15 для ориентирования второго объекта 32 относительно плоскости ориентации 28, при этом эталонная плоскость 27 содержит ось второго объекта 32,
в) определяют зону соединения объектов, продольно перемещая суппорт 14 ко второму средству удержания 10 вдоль общей оси 9, параллельной эталонной плоскости 27, первые средства удержания 7, с одной стороны, и вторые средства удержания 10 и суппорт 14, с другой стороны, выполнены с возможностью вращения на одной оси, перпендикулярной эталонной плоскости 27, при этом первые средства удержания подвижны вдоль оси, перпендикулярной оси вращения,
г) объекты соединяют закаткой, сваркой или иным образом.
После осуществления первого соединения определяют декартову систему координат (x, y, z), принимая за начало координат (0, 0, 0) точку центрирования 33 первого соединения. Предпочтительно, чтобы точка центрирования 33 была размещена на пересечении эталонной плоскости 27 и плоскости ориентации 28, причем размещение начала координат выбрано таким образом, что другая ось 34 второго объекта 32 была бы размещена в плоскости ориентации 28.
В случае необходимости повторяют этапы а), б), в), г) для соединения нового объекта с уже полученным соединением, при этом средства визуализации позволяют применить координаты (x, y, z) к этим элементам для обеспечения их пространственной ориентации по отношению к геометрии соединения.
В качестве примера реализации ориентированных трубчатых узлов на фиг.4 схематично представлены эталонная и ориентированная в плоскости соединения закаткой первого соединения на первом узле. Эталонная плоскость 27 содержит первый изгиб первой конечной части первого трубопровода. Угол изгиба может быть между 0° и 180°. Конечная длина трубопровода, содержащая, например, до 9 изгибов, может достигать 4 м при диаметре трубы от 6,25 мм до 25,4 мм.
Изобретение относится к устройству и способу соединения ориентируемых объектов, таких как детали трубопроводов. Устройство содержит средства вращательного перемещения по оси вращения первой и второй поворотных плит. Первая поворотная плита имеет первую главную ось, перпендикулярную оси вращения, и содержит первые средства удержания объектов, которые продольно подвижны вдоль первой главной оси. Вторая поворотная плита расположена по второй главной оси, перпендикулярной оси вращения, и содержит вторые средства удержания объекта в суппорте, предназначенном для удержания и угловой ориентации объектов. Суппорт продольно подвижен относительно вторых средств удержания вдоль второй главной оси. Средства визуализации показывают угол поворота фланца и положение второй поворотной плиты. Изобретение упрощает операции соединения в пространстве ориентируемых объектов. 2 н. и 14 з.п. ф-лы, 4 ил.
1. Устройство для соединения ориентируемых объектов, например трубопроводов, отличающееся тем, что содержит средства вращательного перемещения (3) на оси вращения (5) первой и второй поворотной плит (1, 2), первую поворотную плиту (1) с первой главной осью (6), перпендикулярной оси вращения (5), содержащую первые средства удержания (7) указанных объектов, при этом первые средства удержания (7) продольно подвижны вдоль первой главной оси (6), вторую поворотную плиту (2) со второй главной осью (9), перпендикулярной оси вращения (5), содержащую вторые средства удержания (10), при этом указанные объекты и суппорт (14) предназначены для удержания и углового ориентирования указанных объектов, суппорт (14), выполненный продольно подвижным относительно вторых средств удержания (10) вдоль второй главной оси (9), средства визуализации (23) угла поворота суппорта и положения второй поворотной плиты.
2. Устройство по п.1, отличающееся тем, что фланец (15) выполнен с Т-образной прорезью для удержания суппорта центрирующего элемента.
3. Устройство по п.2, отличающееся тем, что центрирующий элемент выполнен с аксиальным отверстием, ось которого параллельна поверхности фланца (15), и содержит средства фиксации для приема переходника, соединенные с указанными объектами.
4. Устройство по одному из пп.1-3, отличающееся тем, что первые средства удержания (7) выполнены с возможностью вращения на оси (8), перпендикулярной первой главной оси (6), и продольного перемещения по перпендикулярной оси (8), при этом вторые средства удержания (10) выполнены с возможностью продольного перемещения по оси (11), перпендикулярной второй главной оси (9).
5. Устройство по одному из пп.1-3, отличающееся тем, что суппорт (14) содержит средства привода его во вращение.
6. Устройство по п.5, отличающееся тем, что средства привода во вращение содержат шаговый двигатель и червячную передачу.
7. Устройство по одному из пп.1-3, отличающееся тем, что суппорт (14) сочленен со вторыми средствами удержания (10) для определения зоны соединения указанных объектов.
8. Устройство по п.7, отличающееся тем, что вторые средства удержания (10) содержат первую неподвижную упорную стенку (18) с прорезью (19) для приема соединяемого объекта, вторую упорную стенку (20), параллельную первой и размещенную на определенном расстоянии от первой, при этом вторая упорная стенка (20) продольно подвижна по оси (11), перпендикулярной второй главной оси (9).
9. Устройство по одному из пп.1-3, отличающееся тем, что средства привода во вращение первой и второй поворотных плит (1, 2) содержат градуированный диск, ось (5) вращения которого перпендикулярна поверхности диска и проходит через его центр.
10. Устройство по п.9, отличающееся тем, что оно содержит станину (4) с плоской поверхностью с сетью отверстий и третьи средства удержания соединяемых объектов, при этом диск (3) является продолжением станины (4).
11. Устройство по п.5, отличающееся тем, что средства визуализации содержат шифратор (23), соединенный со средствами привода во вращение фланца и индикатором.
12. Устройство по п.7, отличающееся тем, что средства визуализации содержат шифратор (23), соединенный со средствами привода во вращение фланца и индикатором.
13. Устройство по п.9, отличающееся тем, что средства визуализации содержат шифратор, соединенный со средствами привода во вращение фланца и индикатором.
14. Способ соединения ориентируемых объектов, таких как трубопроводы, отличающийся тем, что определяют эталонную плоскость соединения (27) и плоскость ориентации (28), перпендикулярные одна относительно другой, затем выполняют следующие операции:
а) помещают в эталонную плоскость (27) первую точку первого соединяемого объекта, закрепленного в первых средствах удержания (7), и вторую точку, близкую к концу первого соединяемого объекта, закрепленному во вторых средствах удержания (10), при этом первый объект размещен между двумя точками соединения на эталонной плоскости (27),
б) устанавливают второй соединяемый объект на суппорт (14) и фланец (15) поворачивают для ориентирования второго объекта относительно плоскости ориентации (28), при этом на эталонной плоскости находится ось второго объекта,
в) определяют зону соединения указанных объектов путем продольного перемещения суппорта (14) ко вторым средствам удержания (10) вдоль общей оси, параллельной эталонной плоскости (27), при этом первые средства удержания (7), с одной стороны, и вторые средства удержания (10) и суппорт (14), с другой стороны, выполнены с возможностью вращения на одной оси, перпендикулярной эталонной плоскости (27), причем первые средства удержания (7) подвижны вдоль оси (6), перпендикулярной оси вращения (5),
г) соединяют указанные объекты закаткой, сваркой или иным образом;
определяют декартову систему координат (x, y, z) с установлением точки отсчета этой системы (0, 0, 0) в точке центрирования первого соединения,
в случае необходимости повторяют операции (а, б, в, г) для нового подсоединения нового объекта к имеющемуся соединению, при этом средства визуализации позволяют определить координаты этих элементов (x, y, z) для обеспечения их ориентации в пространстве по отношению к геометрии соединения.
15. Способ по п.14, отличающийся тем, что центрирующая точка (33) расположена на пересечении эталонной плоскости (27) и плоскости (28) ориентирования, при этом начальное распределение должно быть осуществлено так, чтобы оси другого или второго объекта были размещены в плоскости (28) ориентирования.
16. Способ по одному из п.14 или 15, отличающийся тем, что средства визуализации показывают, по меньшей мере, угол поворота суппорта и положение оси, связывающей рассмотренное устройство со вторыми средствами удержания.
| US 3772753 А, 20.11.1973 | |||
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ОБЪЕКТА | 1991 |
|
RU2018914C1 |
| DE 4334116 A1, 13.04.1995 | |||
| US 4641819 A, 10.02.1987 | |||
| US 3870288 A, 11.03.1975 | |||
| JP 11058074 A, 02.03.1999. | |||

