Изобретение относится к области дистанционного управления бортовой регистрирующей аппаратурой (БРА) космических аппаратов (КА). Предлагаемая система позволяет обрабатывать и передавать зарегистрированные данные на Землю с космической станции.
Известен способ управления бортовой аппаратурой космического аппарата см. патент па изобретение РФ №2440677 от 20.01.2012, заключающийся в считывании необходимой для управления конкретной бортовой аппаратурой телеметрической информации (ТМИ), передаче ее в центр управления полетом (ЦУП) для анализа, формировании радиокоманд (РК) оператором ЦУП, передаче РК через бортовой приемопередатчик в бортовой комплекс управления (БКУ), преобразовании РК и трансляции их из БКУ КА в блок управления (БУ) бортовой аппаратурой КА. При этом значения ТМИ снимают средствами БКУ в интересах всего набора бортовой аппаратуры с заданным периодом обновления, нормируют и запоминают в памяти БКУ с последующей передачей ТМИ в ЦУП, пакеты команд для включения-выключения бортовой аппаратуры с заданными интервалами времени выдачи команд формируют и передают в БКУ заблаговременно, а в последующем запускают одной РК.
Недостатком данного изобретения является невозможность одновременного управления различной бортовой аппаратурой. Еще одним недостатком данного способа являйся сложность, а в реальных условиях и невозможность одновременного получения большого массива данных о г различной бортовой регистрирующей аппаратуры.
Наиболее близким техническим решением является патент Франции FR 2697375A1 от 1994-04-29, в котором каждый модуль бортовой регистрирующей аппаратуры космического аппарата связан кабелем с космическим аппаратом, откуда сигнал поступает на Землю.
Недостаток данной системы состоит в невозможности использования ее для передачи различной научной информации в сочетании с одновременным управлением аппаратурой получающей данную научную информацию.
Предлагаемая система направлена на устранение указанных выше недостатков.
Задачи, решаемые с помощью предлагаемой системы:
- удешевление конструкции научной аппаратуры (НА) за счет более дешевой элементной базы (соответствующей менее критичным условиям эксплуатации в условиях термообъема), используемой в блоке управления и обработке данных (БУОД);
- стандартизация и унификация элементной базы БУОД;
- уменьшение тепловыделения БРА за счет распределения системы управления, сбора и обработки данных;
- создание гибкой системы оперативного управления, сбора и обработки информации за счет осуществления одновременного сочетания функций управления, организации приема, накопления и предварительной обработки информации от различных не связанных между собой БРА;
- экономия финансовых ресурсов и повышение надежности системы НА (БРА+БУОД) за счет ремонтопригодности БУОД при штатной эксплуатации (возможность технического обслуживания БУОД со стороны экипажа космонавтов);
- технический результат - возможность легкого, удобного, надежного одновременного подключения к устройству различной бортовой регистрирующей аппаратуры, устанавливаемой вне термообъема КА, и, в дальнейшем, управления ей.
Технический результат достигается тем, что система управления сбора и обработки данных с бортовой регистрирующей аппаратуры (БРА) космического аппарата (КЛ) включает, по меньшей мере, один блок БРА связанный, по меньшей мере, двумя каналами связи с блоком управления и обработки данных (БУОД), который связан с бортовой аппаратурой (БА) КА по, по меньшей мере, одному каналу связи для последующего сброса информации па Землю, при этом БУОД включает:
- устройство сопряжения (УС), связанное, по меньшей мере, двумя каналами связи с БРА;
- автономное таймерное устройство (АТУ) связанное локальной магистралью с УС;
- одноплатный компьютер (ОПК), связанный локальной магистралью с УС;
- связанные с ОПК, систему принудительного охлаждения (СПО), систему термодатчиков (СТД), блок запоминающего устройства (БЗУ) и блок синхронной передачи данных (БСПД);
- блок вторичного питания (БП), осуществляющий постоянное питание ОПК, СПО, СТД, БЗУ, БСПД;
- систему трансляции команд и распределения питания (СТКРП), питающую и управляющую БП;
а БА КА включает:
- систему управления бортовой аппаратуры (СУБА);
- содержащую информационную управляющую систему (ИУС);
- систему бортовых измерений (СБИ).
Кроме того СТКРП получает телеметрическую информацию от каждого БРА и передает ее в СБИ КА, а также принимает команды управления от СУБА КА и транслирует их в УС для последующей передачи в БРА но каналам связи.
БСПД принимает информацию от ОПК, буферизирует ее в собственном запоминающем устройстве (ЗУ) для последующей передачи в СБИ КА для оперативного сброса на Землю и анализа.
Кроме того система трансляции команд и распределения питания (СТКРП) включает телеметрические датчики: контакт реле (КР), термодатчик (ТД), электронный ключ (ЭК), аналоговый датчик (АД) и контроль стыковки (КС) информацию с которых СТКРП выдает в систему бортовых измерений космического аппарата (СБИ КА).
Каналы связи, по которым связано УС с ИУС представляют собой SpaceWire и/или MIL1553 и/или LVDS и/или CAN.
Скоростные интерфейсы передачи данных ОПК для связи с ИУС представляют собой RS422/485 и/или USB и/или Ethernet.
Каналы связи, связывающие блок БРА с блоком управления и обработки данных (БУОД) включают служебный капал управления и канал передачи информации.
В системе управления, сбора и обработки данных с бортовой регистрирующей аппаратуры (БРА) космического аппарата в качестве БЗУ используются сменные носители информации, а в УС имеется свое собственное ЗУ для проведения буферизации НИ, поступающей в УС из БРА.
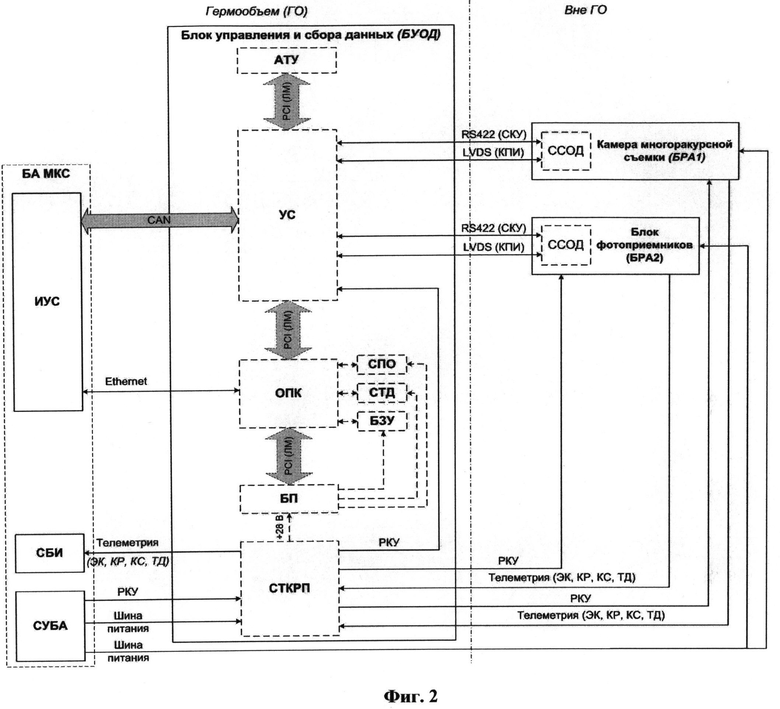
Общая схема, предлагаемой системы, показана на Фиг.1, на которой обозначены:
- БА КА-бортовая аппаратура космического аппарата (для космической станции существует дополнительная возможности использовать, при необходимости - в случае, когда БА несправна и не может принимать НИ и подавать управляющие воздействия на БУОД, для управления работой БУОД и приема НИ из БЗУ БУОД - бортовой лэптоп);
- СУБА - система управления бортовой аппаратуры, от которой БУОД получает питание и принимает релейные команды управления (РКУ);
- ИУС - информационная управляющая система;
- СБИ - система бортовых измерений;
- БРА 1…БРА N-бортовая регистрирующая аппаратура, в количестве N-штук (N-целое), устанавливаемая на внешней стороне космической станции или космического аппарата (вне ГО) и каждая имеющая, по меньшей мере, два канала связи: служебный канал управления СКУ и канал передачи информации КПИ (в зависимости от условий проведения эксперимента и величины потока передаваемой НИ существует возможность использования одного двунаправленного интерфейса такого, как, например RS422 со скоростью передачи до 1 Мбит/с, для одновременной реализации вышеуказанных каналов связи - СКУ и КПИ);
- СКУ - служебный канал управления;
- КПИ - канал передачи информации;
- БУОД - блок управления и обработки данных, данный блок устанавливается внутри космической станции или космического аппарата, т.е. в гермообъеме (ГО) станции или космического аппарата.
БУОД содержит следующие системы:
- АТУ - автономное таймерное устройство;
- ЛМ - локальная магистраль, по которой связаны АТУ и УС, УС и ОПК;
- УС - устройство сопряжения, связывающее БРА 1…БРА N с ОПК и имеющее каналы связи: SpaceWire, MIL1553, LVDS, CAN;
- ЦМ - цифровые массивы;
- ОПК - одноплатный компьютер, имеющий скоростные интерфейсы передачи данных (RS422/485, USB и Ethernet) предназначенные для связи с ИУС БА КА;
- СПО - система принудительного охлаждения, связанная с ОПК;
- СТД - система термодатчиков, связанная с ОПК;
- БЗУ - блок запоминающего устройства, связанный с ОПК;
- БСПД - блок синхронной передачи данных в СБИ (система бортовых измерений космического аппарата) научной информации, также связанный с ОПК;
- БП - блок вторичного питания, осуществляющий постоянное питание ОПК, СПО, СТД, БЗУ, БСПД;
- СТКРП - система трансляции команд и распределения питания, управляющая БП, а также трансляции служебной телеметрической информации от БРА в СБИ. В состав СТКРП входят телеметрические датчики КР - контакт реле, ТД - термодатчик, ЭК - электронный ключ, АД - аналоговый датчик, КС - контроль стыковки;
- УС, АТУ и БП подключаются к внутренней шине ОПК (локальные магистрали (ЛМ) такие как РСI, ISA и т.д.) через стандартные мезонинные разъемы.
В заявляемой системе БУОД предназначен для:
- организации управления различными БРА но служебным каналам управления (СКУ) через интерфейсы MIL1553, SpaceWirc, USD, RS422/485 или CAN или иных необходимых интерфейсов;
- приема массивов цифровой информации от различных БРА по каналам передачи информации (КПИ), через скоростные интерфейсы MIL1553, RS422/485 или CAN (со скоростями порядка 1 Мбит/с) или высокоскоростные (более 10 Мбит/с) - LVDS, LAN, SpaceWire (для одной БРА может быть несколько КПИ, выполненных па разных скоростных интерфейсах);
- приема массивов цифровой информации от различных БРА по скоростным интерфейсам SpaceWirc (со скоростями от 2 до 400 Мбит/с), LVDS, Ethernet;
- сбора вспомогательной служебной информации (опроса дополнительных, установленных на тепловыделяющих элементах БУОД термодатчиков, входящих в систему термодатчиков (СТД)) для последующего ее включения в формат научной информации;
- сбора вспомогательной служебной информации, полученной от телеметрических датчиков, установленных в БРА для последующей ее трансляции в СБИ;
- накопления, временного хранения, полученных от различных БРА массивов информации и передачи их в информационную управляющую систему (ИУС) КА по каналу LAN (Ethernet) для последующего сброса на Землю;
- получения кода бортового времени (КБВ) (не реже 1 раза в сутки) и четырехбайтных командных слов от информационной управляющей системы (ИУС) КА по каналам управления RS422 или CAN;
- получения баллистико-навигационных данных по каналам управления RS422/485, Ethernet или CAN для последующего включения их в формат НИ для последующей привязки положения в пространстве БРА в любой момент времени при регистрации НИ;
- выработки независимой временной метки (с помощью АТУ) с целью ее дальнейшей привязки к метке КБВ;
- обработки и сжатия полученных массивов информации or различных БРА и передачу их через БСПД в СБИ для оперативного сброса на Землю и анализа.
ОПК является центральным элементом БУОД и представляет собой серийно выпускаемый мощный процессорный модуль промышленною стандарта (возможно применение специализированною ОПК, созданного отдельно под конкретную разработку БУОД и имеющего все необходимые интерфейсы для сопряжения с БА КА и БРА, но создание такого ОПК крайне затратная задача, кроме того он должен дополнительно пройти сертификацию для определения возможности его применения в космической технике), имеющий внутреннюю тину (локальную магистраль такую как PCI, ISA или др.).
ОПК осуществляет управление БРА, программный сбор служебной и научной информации с БРА согласно программе измерений, закодированной в нр01раммируемом постоянном запоминающем устройстве (ППЗУ) ОПК, запись данных в оперативную память ОПК, а также предварительную обработку информации и ее вывод либо в БЗУ через интерфейсы типа Serial АТА, либо в БА КА через собственные скоростные интерфейсы (Ethernet, USB и др.), или передачу сначала вышеуказанной информации через ЛМ в УС (если ОПК не обладает необходимыми скоростными интерфейсами для передачи информации в БА КА), а потом в БА КА через скоростные интерфейсы УС (LVDS, SpaceWire и др.).
ОПК, как правило, включает в себя следующие основные элементы: процессор, оперативную память, сетевые контроллеры Ethernet, видеоконтроллер, последовательные порты RS422/485/232, порты USB, напаянный флэш-диск, стандартный параллельный порт (LPT), интерфейс Serial АТА, сторожевые таймеры и др.
Для выполнения требований назначения БУОД использует установленную в ОПК операционную систему реального времени (ОСРВ) типа QNX, обладающую высокой надежностью при работе в сетевых приложениях, и позволяющей добиться полной совместимости с, например, с ОСРВ ИУС российского сегмента (PC) Международной космической станции (МКС), что позволяет эффективно взаимодействовать (осуществлять обмен данными по запросам) на уровне серверов ИУС PC МКС и БУОД (например, по известной системе «сервер»-«клиент»).
УС расширяет возможности БУОД, обеспечивая интерфейсы для обмена с БРА, отсутствующие в ОПК.
УС принимает от БРА научную информацию (НИ) в виде цифровых массивов по каналам КПИ и передает ее в ОПК по ЛМ.
УС имеет свое собственное ЗУ для проведения при необходимости буферизации НИ, поступающей в УС из БРА (буферизация происходит в случае, когда БРА работает в режиме в режиме высоких загрузок и ЛМ не справляется с большим потоком данных).
УС осуществляет обмен данными между БРА и БУОД но каналам СКУ: в БРА поступают КУ и КБВ, а из БРА - отклики (квитанции) на поступившие в БРА КУ.
УС осуществляет обмен данными между БУОД и СУБА (ИУС) по каналам КПИ, реализованным на скоростных интерфейсах, таких как LVDS, SpaceWire (передача ЦМ НИ) и по служебным каналам СКУ, реализованным па интерфейсах RS422 или CAN. По каналам СКУ из ИУС в УС поступают КУ и КБВ, а из УС в ИУС - отклики (квитанции) на поступившие в УС КУ, а также служебная информация, отображающая состояние телеметрических параметров БУОД.
Необходимость в применении независимого (от системного процессора ОПК) автономного таймерного устройства (АТУ), контролирующего периодические процедуры программных устройств, диктуется во-первых, возможностью появления фактов «зависания» (зацикливания) микропроцессоров вследствие одиночных сбоев, имеющих, как известно, ненулевую вероятность. Одновременно, АТУ может поставлять системе сбора информации код относительного системного времени с точностью до 0,1 мкс. Таким образом, во-вторых, АТУ предназначено для привязки времени регистрации событий к метке времени, выдаваемой информационной управляющей системой (ИУС) КА.
СТКРП принимает от СУБА КА по отдельному фидеру бортовое напряжение питания 28 В, имеет внутри себя защиту от неправильного подключения полюсов питания и от кратковременного импульсного пускового тока на 10 А, а также осуществляет фильтрацию (блокировку) входного питания от электрических помех как со стороны нагрузки, подключенной к фидеру питания, так и наоборот, со стороны БУОД.
СТКРП принимает дискретные (релейные) команды управления (РКУ) от СУБА КА и транслирует их в УС и в БРА. В цепи команд используется питание ±28,5 В, подаваемое в БУОД и соответственно в БРА по независимым тинам питания. Команды поступаю г в БУОД/БРА на управляющие обмотки реле дублированными «сухими» контактами реле. Параллельно командам на исполнительные контакты реле подается напряжение бортового питания 28,5 В, которое при срабатывании данных реле поступает на нагрузку и создает постоянный ток нагрузки (электронные узлы БУОД/БРА). Прохождение всех РКУ подтверждается квитанциями (отклик БУ ОД/БРА на прохождение РКУ), выдаваемыми БУОД/БРА по дискретным каналам телеметрии СБИ через контакты реле (КР) тина «сухой контакт». При этом, ток нагрузки во внешнюю цепь ограничен до значения 10 мА (при замыкании нормально разомкнутых контактов). Дополнительно, квитанции дублируются и подаются на УС как формат регистра статус команд (СТК). В состав СТКРП для контроля напряжения питания 5 В входит один датчик тина ЭК (электронный ключ). Дополнительно СТКРП выдает в СБИ КА информацию с телеметрических датчиков (ТМ-датчиков) БУОД (КР - контакт реле, ТД - термодатчик, ЭК - электронный ключ) и БРА (КР - контакт реле, ТД - термодатчик, ЭК - электронный ключ, АД - аналоговый датчик, КС - контроль стыковки).
Основная функция БСПД - прием данных в виде цифровых массивов (ЦМ) информации от ОПК но синхронному каналу передачи данных (после их предварительной обработки ОПК и сжатия), буферизация их в собственном ЗУ для последующей передачи в СБИ КА для оперативного сброса па Землю и анализа.
БП предназначен для:
- выработки из первичного бортового питания, поданного в СТКРП по фидеру питания посредством подачи на СТКРП соответствующей РКУ, вторичных напряжений питания для запитки УС, ОПК, АТУ, БСПД, а также внутренней шины ОПК (локальных магистралей PCI, ISA или др.);
- стабилизации номиналов питания и их первичную фильтрацию от электрических помех и наводок.
БЗУ необходим в случае, если требуется хранить информацию, объем которой превышает объем накопителей (буферизация) штатно размещенных в составе ОПК. В состав БЗУ могут входить, сменные носители информации такие, как, например набор сменных твердотельных IDE-носителей информации объемом до 256 Гбайт каждый, что позволяет непрерывно и очень быстро (на два порядка быстрее, чем запись во внутреннюю флэш-память) записывать полезные события (цифровые массивы научной информации) при работе БРА в режиме высоких загрузок детекторов (при частотах срабатывания от 1 МГц и выше).
При повышенном потреблении электронных систем БУОД (например, если ОПК потребляет более 12 Вт) и его работе в приборных отсеках КА при температуре окружающей среды от 30°С и выше, для достижения необходимого температурного режима на поверхности тепловыделяющих элементов в БУОД наряду с теплоотводами для кондуктивного отвода тепла на корпус, применяется система принудительного охлаждения (СПО) на базе вентиляторов работающих в «горячем» резерве, обеспечивающая путем обдува циркуляцию воздуха и повышение эффективности охлаждения.
Предлагаемая структура распределенной системы сбора и обрабогки данных с бортовой регистрирующей аппаратуры имеет топологию типа «звезда», в центре которой расположен БУОД, а на концах лучей расположены различные тины бортовой регистрирующей аппарагуры, каждая из которых связана с БУОД своими отдельными каналами передачи информации (на базе интерфейсов RS422/485, CAN, LVDS и др.), по которым передается научная информация, касающаяся только этой БРА, что позволяет обеспечить необходимые для каждой БРА потоки передаваемой в БУОД информации и гибкую систему оперативного управления БРА.
Типичный алгоритм работы БРА с БУОД нижеследующий.
Детекторы БРА являются источником экспериментальных данных (совокупности сигналов), поступающих через интерфейс (совокупность регистров) но логическим и амплитудным каналам измерений (количество этих каналов у каждой БРА может быть разное) в электронные модули БРА, где они преобразуются в цифровые массивы данных, которые поступают на выходные интерфейсы БРА, которые имеют в своем составе контроллеры, управляющие сбором и передачей сформированных массивов научных и служебных данных но КПИ и СКИ. При этом БРА включает: собственно регистратор информации (детектирующее устройство) и систему сбора и предвари ильной обработки информации (ССОД), предназначенное для приема цифровых данных с регистратора информации БРА, фильтрации полезной информации, упаковки ее в цифровые массивы (ЦМ) информации, промежуточной буферизации ЦМ и их передачи по каналам связи в БУОД.
Контроллеры N каналов имеют также достаточные буферные (стековые) накопители для того, чтобы не прекращать набор сформированных для передачи в УС БУОД массивов во время сигнала запрета работы, например, по каналу Ni, вызванного, например, тем фактом, что текущий накопитель массивов канала Ni в БЗУ БУОД переполнился и перемонтируется на новый (свободный) накопитель, или вызванного фактом системного сбоя. Сигнал запрета выдастся по СКИ от ОПК БУОД, осуществляющего накопление информации в БЗУ с периодическим перемонтированием (переключением) накопителей («дисков»). В случае отсутствия сигнала запрета на передачу, по свободному скоростному каналу КПИ_N осуществляется сброс информации от БРА_N в БУОД, где она временно запоминается на доступном «дискет» БЗУ до того момента времени, когда будет доступен ресурс ОПК, выделенный на предварительную обработку «диска_N», в результате которой образуется массив сжатой научной информации, подлежащий выводу в реальном времени через БСПД в СБИ (капал телеметрии). Одновременно с компоновкой массивов, предназначенных для вывода в СБИ, а также несжатых массивов в ИУС, ОПК проводит сбор информации со служебных систем и формирует массивы служебной информации, которая по командам из СУБА может передаваться отдельно от массивов научной информации (например, для оценки параметров работоспособности и БУОД и БРА). Все форматы данных в массивах информации привязаны к меткам бортового времени, сгенерированных АТУ. Дополнительно АТУ, в случае сбоя («зависания») в программе ОПК, перезапускает его («мягкий перезапуск»), сохраняя при этом статус перезапуска в служебном регистре, позволяющим идентифицировать возможные сбои в информации, возникшие при перезапуске системы, несмотря на то, что по всем N-каналам передачи массивов автоматически выставляются сигналы запрета.
Таким образом, при штатной (бессбойной) рабом удаленной системы всегда имеется определенное соотношение между производительностью БУОД (ввод, обработка, хранение, вывод данных) и плотностью потока входной информации, находящийся в данный момент в буферах БРА, подлежащих передачи в БУОД. Это соотношение выбирается заведомо, исходя из конкретных задач, и обуславливает конкретную структуру и исполнение узлов БУОД и БРА. Однако, общая структура системы (Фиг.1) не изменяется, она заведомо несколько избыточна (как, например, для случая, когда требуемся увеличенная производительность ОПК, который может иметь энергопотребление более 10 Вт, что требует применения СПО).
Пример реализации заявляемой системы на МКС показан на Фиг.2.
НА состоит из двух БРА (камеры многоракурсной съемки и блока фотоприемников), располагающихся вне ГО и имеющих в своем составе отдельные ССОД. НА связана с блоком управления и сбора данных (БУОД), расположенного в ГО, и обмен данными между ССОД каждого БРА и БУОД происходит по каналам СКУ и КПИ, реализованным на базе интерфейсов RS422 и LVDS, по описанному выше алгоритму работы БРА с БУОД.
Такая схемная реализация позволяет существенно упростить взаимодействие служебных систем МКС с каждым отдельным БРА, возлагая функции накопления и предварительной обработки информации - сжатие и отбраковку снимков, поступающих от БРА, на БУОД.
Выше были раскрыты основные особенности системы управления сбора и обработки дачных с бортовой регистрирующей аппаратуры космического аппарата, но любому специалисту в данной области техники очевидно, что на основе раскрытых данных можно создать множество вариантов аналогичной системы, схема которой раскрыта в данной заявке, и которая будет иметь иные электронные компоненты, но выполняющие аналогичные функции раскрытым.
| название | год | авторы | номер документа |
|---|---|---|---|
| УДАЛЕННАЯ СИСТЕМА СБОРА И ОБРАБОТКИ ДАННЫХ ДЛЯ БОРТОВОЙ РЕГИСТРИРУЮЩЕЙ АППАРАТУРЫ | 2012 |
|
RU2493592C1 |
| КОРПУС ЭЛЕКТРОННОЙ АППАРАТУРЫ | 2013 |
|
RU2533076C1 |
| СПОСОБ ФОРМИРОВАНИЯ 4-КАНАЛЬНОЙ ОТКАЗОУСТОЙЧИВОЙ СИСТЕМЫ БОРТОВОГО КОМПЛЕКСА УПРАВЛЕНИЯ ПОВЫШЕННОЙ ЖИВУЧЕСТИ И ЭФФЕКТИВНОГО ЭНЕРГОПОТРЕБЛЕНИЯ И ЕГО РЕАЛИЗАЦИЯ ДЛЯ КОСМИЧЕСКИХ ПРИМЕНЕНИЙ | 2011 |
|
RU2449352C1 |
| СЛУЖЕБНЫЙ БЛОК КОСМИЧЕСКОЙ ПЛАТФОРМЫ | 2024 |
|
RU2831970C1 |
| Морское геофизическое вычислительное устройство | 1977 |
|
SU887932A1 |
| АВТОМАТИЗИРОВАННАЯ КОМПЛЕКСНАЯ СИСТЕМА МОНИТОРИНГА УДАЛЕННЫХ ОБЪЕКТОВ И СПОСОБ МОНИТОРИНГА УДАЛЕННЫХ ОБЪЕКТОВ | 2023 |
|
RU2820412C1 |
| Стенд комплексирования информационно-управляющих систем многофункциональных летательных аппаратов | 2016 |
|
RU2632546C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ПРИ ПОДДЕРЖАНИИ ЗАДАННОЙ ОРИЕНТАЦИИ С ПОМОЩЬЮ РЕАКТИВНЫХ МАХОВИКОВ | 2004 |
|
RU2281233C2 |
| Система проверки бортовых радиотехнических систем космических аппаратов | 2022 |
|
RU2799959C1 |
| СИСТЕМА ГОРОЧНОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА (ГАЛС Р) | 2005 |
|
RU2303542C1 |
Изобретение относится к области дистанционного управления бортовой регистрирующей аппаратурой (БРА) космических аппаратов (КА). Техническим результатом является повышение удобства и надежности одновременного подключения к устройству различной бортовой регистрирующей аппаратуры. Предлагаемая система управления, сбора и обработки данных с БРА КА включает, по меньшей мере, один блок БРА, связанный, по меньшей мере, двумя каналами связи с блоком управления и обработки данных (БУОД), который связан с бортовой аппаратурой КА по, по меньшей мере, одному каналу связи для последующего сброса информации на Землю. БУОД включает: устройство сопряжения, автономное таймерное устройство, одноплатный компьютер, систему принудительного охлаждения, систему термодатчиков, блок запоминающего устройства, блок синхронной передачи данных, блок вторичного питания и систему трансляции команд и распределения питания. 6 з.п. ф-лы, 2 ил.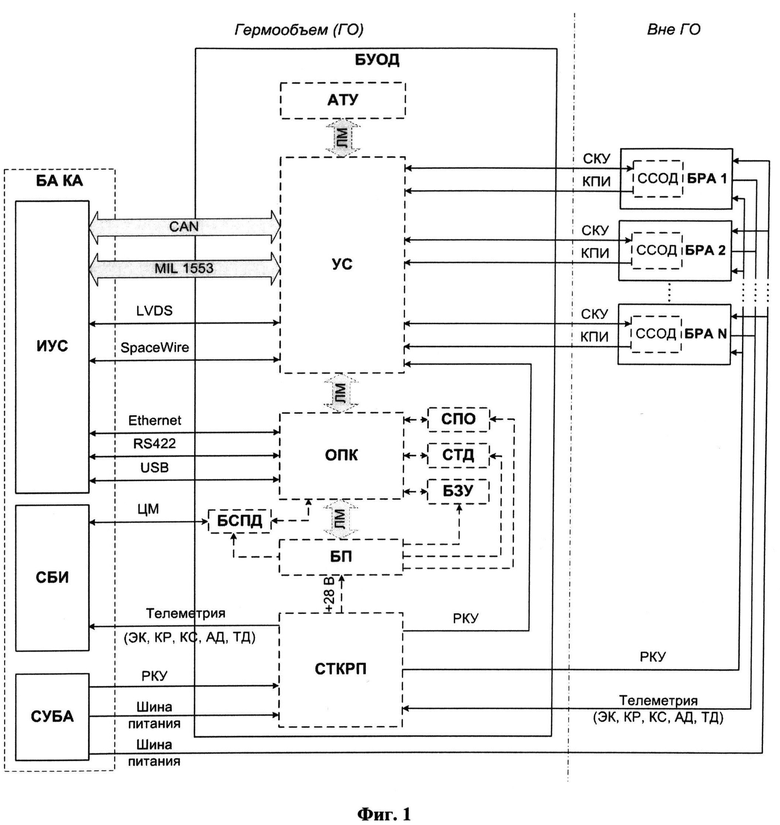
1. Система управления, сбора и обработки данных с бортовой регистрирующей аппаратуры (БРА) космического аппарата (КА), включающая, по меньшей мере, один блок БРА, связанный, по меньшей мере, двумя каналами связи с блоком управления и обработки данных (БУОД), который связан с бортовой аппаратурой (БА) КА по, по меньшей мере, одному каналу связи для последующего сброса информации на Землю, при этом БУОД включает:
- устройство сопряжения (УС), связанное, по меньшей мере, двумя каналами связи с БРА;
- автономное таймерное устройство (АТУ), связанное локальной магистралью с УС;
- одноплатный компьютер (ОПК), связанный локальной магистралью с УС;
- связанные с ОПК систему принудительного охлаждения (СПО), систему термодатчиков (СТД), блок запоминающего устройства (БЗУ) и блок синхронной передачи данных (БСПД);
- блок вторичного питания (БП), осуществляющий постоянное питание ОПК, СПО, СТД, БЗУ и БСПД;
- систему трансляции команд и распределения питания (СТКРП), которая запитывает БП первичным (бортовым) напряжением +28 В и управляет БП с помощью команд, кроме того, СТКРП получает телеметрическую информацию от каждого БРА и передает ее в СБИ КА, а также принимает команды управления от СУБА КА и транслирует их в УС для последующей передачи в БРА по каналам связи, БА КА включает:
- систему управления бортовой аппаратуры (СУБА);
- информационную управляющую систему (ИУС);
- систему бортовых измерений (СБИ),
БСПД принимает информацию от ОПК, буферизирует ее в собственном ЗУ для последующей синхронной передачи цифровых массивов (ЦМ) в СБИ КА в режиме оперативного сброса ЦМ на Землю.
2. Система управления, сбора и обработки данных с бортовой регистрирующей аппаратуры (БРА) космического аппарата по п.1, отличающаяся тем, что система трансляции команд и распределения питания (СТКРП) включает телеметрические датчики: контакт реле (КР), термодатчик (ТД), электронный ключ (ЭК), аналоговый датчик (АД) и контроль стыковки (КС), информацию с которых СТКРП выдает в систему бортовых измерений космического аппарата (СБИ КА).
3. Система управления, сбора и обработки данных с бортовой регистрирующей аппаратуры (БРА) космического аппарата по п.1, отличающаяся тем, что каналы связи, по которым связано УС с ИУС, представляют собой SpaceWire, и/или MIL 1553, и/или LVDS, и/или CAN.
4. Система управления, сбора и обработки данных с бортовой регистрирующей аппаратуры (БРА) космического аппарата по п.1, отличающаяся тем, что скоростные интерфейсы передачи данных ОПК для связи с ИУС представляют собой RS 422/485, и/или USB, и/или Ethernet.
5. Система управления, сбора и обработки данных с бортовой регистрирующей аппаратуры (БРА) космического аппарата по п.1, отличающаяся тем, что каналы связи, связывающие блок БРА с блоком управления и обработки данных (БУОД), включают служебный канал управления и канал передачи информации.
6. Система управления, сбора и обработки данных с бортовой регистрирующей аппаратуры (БРА) космического аппарата по п.1, отличающаяся тем, что в качестве БЗУ используются сменные носители информации.
7. Система управления, сбора и обработки данных с бортовой регистрирующей аппаратуры (БРА) космического аппарата по п.1, отличающаяся тем, что в УС имеется свое собственное ЗУ для проведения буферизации НИ, поступающей в УС из БРА.
| КОСМИЧЕСКИЙ РАДИОЛОКАТОР С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЮЩИЙ ИЗОБРАЖЕНИЕ В РЕАЛЬНОМ ВРЕМЕНИ | 1999 |
|
RU2158008C1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 7606590 B2, 20.10.2009 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Центробежный пеноразбиватель | 1954 |
|
SU100657A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ СОСТОЯНИЯ ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ РОССИЙСКОЙ ФЕДЕРАЦИИ В ИНТЕРЕСАХ ОБЕСПЕЧЕНИЯ ЗАЩИТЫ ОТ ТЕХНОГЕННЫХ, ПРИРОДНЫХ И ТЕРРОРИСТИЧЕСКИХ УГРОЗ | 2005 |
|
RU2296421C1 |
| Устройство для уплотнения насоса, работающего при высоких давлениях | 1950 |
|
SU96276A1 |

