Изобретение относится к области космической техники и может быть использовано в бесплатформенных инерциальных системах ориентации КА, построенных на базе измерителей угловой скорости (ИУС).
Известен способ калибровки ИУС, заключающийся в калибровочных разворотах космических аппаратов (КА) вокруг осей крена и тангажа с визированием заданных астроориентиров перед началом каждого разворота и последующим вычислением погрешности ИУС, а также компенсации влияния постоянных составляющих уходов ИУС как составляющей погрешности в их выходном сигнале.
Этот способ реализуется устройством калибровки измерителей угловой скорости бесплатформенных инерциальных систем ориентации КА, содержащим измеритель угловой скорости вращения КА, астродатчики, обеспечивающие визирование заданных астроориентиров, устройство формирования параметров программного движения КА для выполнения калибровочных разворотов КА, устройство запоминания параметров углового движения перед началом каждого разворота по сигналам с устройства формирования программы движения, устройство вычисления погрешностей измерителя угловой скорости и компенсации постоянных уходов в их выходном сигнале, устройство управления, формирующее по информации о программной и измеренной угловой скорости и программном и рассчитанном по информации с ИУС в устройстве оценки углового положения КА угловом положении управляющие сигналы на исполнительные органы, обеспечивающие управление угловым движением КА [1].
Недостатком этого способа, реализованного известным устройством, является то, что в результате выполнения указанных калибровочных разворотов КА и соответствующей обработки измерительной информации не может быть оценена величина вариации крутизны выходного сигнала ИУС по оси, расположенной вдоль оси тангажа. Кроме того, указанный способ калибровки погрешностей ИУС не позволяет оценить погрешности ИУС, обусловленные ошибками установки ИУС в корпусе КА.
Недостаточно высока оперативность (быстродействие) указанного способа калибровки. Для вычисления величины вариации крутизны выходных сигналов ИУС и степени неортогональности осей чувствительности всех трех одноосных измерителей угловой скорости требуется выполнить два последовательных плоских калибровочных поворота КА на угол 2π радиан каждый, что при ограничениях на абсолютную величину угловой скорости калибровочного маневра может занимать относительно продолжительное время.
Известен также способ калибровки измерителей угловой скорости бесплатформенных инерциальных навигационных систем ориентации космических аппаратов, заключающийся в трех последовательных плоских калибровочных поворотах космического аппарата вокруг осей крена, рыскания и тангажа, связанной с объектом ориентации системы координат на заданный угол, меньший 2π радиан, с визированием двух заданных астроориентиров с помощью датчиков астроориентации перед началом и после окончания каждого из калибровочных разворотов космического аппарата, после чего по измерительной информации, полученной в результате астровизирования, и информации, полученной с помощью бесплатформенной инерциальной навигационной системы, вычисляют ошибку бесплатформенной навигационной системы и оценивают величины погрешности блока измерителей угловой скорости.
Этот способ реализуется устройством, содержащим блок датчиков астроориентации (астровизирных устройств), включающим, по крайней мере, два астровизирных устройства с неколлинеарными оптическими осями, запоминающее устройство, предназначенное для хранения каталога астроориентиров и углов поворота КА вокруг осей связанной системы координат, блок гироинерциальных измерителей, бесплатформенную инерциальную навигационную систему, осуществляющую интегрирование кинематических уравнений по информации об абсолютной угловой скорости объекта ориентации, вычислительное устройство определения астроориентации КА, устройство сравнения кватернионов, вычислительное устройство, предназначенное для вычисления, оценок элементов матрицы мультипликативных погрешностей блока гироинерциальных измерителей [2] (прототип).
Недостатком этого способа, реализованного известным устройством, является то, что для оценки погрешностей масштабных коэффициентов (вариации крутизны) и погрешностей установки осей чувствительности измерителей угловой скорости необходимо выполнять калибровочные повороты на углы  радиан и π радиан, что при малых угловых скоростях (≈0,1°/с) калибровочного маневра может занимать относительно продолжительное время. Недостатком способа-прототипа является также то, что в способе калибровки не производится оценка постоянных составляющих нулевого сигнала (ухода) по каждой из измерительных осей, и то, что калибровку погрешностей измерителей угловой скорости по указанному способу можно проводить только для трехосных измерителей угловой скорости с ортогональным расположением осей. Это объясняется следующим. Погрешность положения каждой из осей чувствительности измерителя угловой скорости в связанной с КА системе координат (здесь принимается совпадающей с приборной системой координат астродатчиков) определяется двумя углами. По каждой из осей чувствительности трехосного измерителя угловой скорости имеется также своя погрешность масштабного коэффициента, т.е. всего девять неизвестных величин, для определения которых необходимо девять независимых уравнений. Эти уравнения в способе-прототипе получают как функции разностей (невязок) между приращениями углового положения КА, полученного по измерениям с астродатчиков, и приращениями, полученными бесплатформенной инерциальной системой по каждой из трех осей связанной с КА системы координат для каждого из трех плоских калибровочных поворотов. Большего количества уравнений в способе-прототипе получить невозможно. Невозможно, следовательно, определить и величины нулевого сигнала по каждой из измерительных осей, для определения которых необходимо еще три уравнения. Величины нулевого сигнала компенсируются с использованием известного способа и в способе-прототипе они принимаются равными нулю.
радиан и π радиан, что при малых угловых скоростях (≈0,1°/с) калибровочного маневра может занимать относительно продолжительное время. Недостатком способа-прототипа является также то, что в способе калибровки не производится оценка постоянных составляющих нулевого сигнала (ухода) по каждой из измерительных осей, и то, что калибровку погрешностей измерителей угловой скорости по указанному способу можно проводить только для трехосных измерителей угловой скорости с ортогональным расположением осей. Это объясняется следующим. Погрешность положения каждой из осей чувствительности измерителя угловой скорости в связанной с КА системе координат (здесь принимается совпадающей с приборной системой координат астродатчиков) определяется двумя углами. По каждой из осей чувствительности трехосного измерителя угловой скорости имеется также своя погрешность масштабного коэффициента, т.е. всего девять неизвестных величин, для определения которых необходимо девять независимых уравнений. Эти уравнения в способе-прототипе получают как функции разностей (невязок) между приращениями углового положения КА, полученного по измерениям с астродатчиков, и приращениями, полученными бесплатформенной инерциальной системой по каждой из трех осей связанной с КА системы координат для каждого из трех плоских калибровочных поворотов. Большего количества уравнений в способе-прототипе получить невозможно. Невозможно, следовательно, определить и величины нулевого сигнала по каждой из измерительных осей, для определения которых необходимо еще три уравнения. Величины нулевого сигнала компенсируются с использованием известного способа и в способе-прототипе они принимаются равными нулю.
Вместе с тем, с целью повышения точности, надежности бесплатформенных инерциальных систем их отказоустойчивости используют измерители угловой скорости с четырьмя, пятью и шестью произвольно расположенными измерительными осями. Проекции вектора абсолютной угловой скорости определяют, например, как средние значения измерений всех возможных конфигураций измерителя угловой скорости по три измерительные оси, которые отличаются хотя бы одной измерительной осью.
В связи со сказанным оценка и учет нулевого сигнала по осям чувствительности измерителя угловой скорости известным способом вообще невозможна, оценка и учет погрешностей масштабных коэффициентов и погрешностей установки каждой из измерительных осей измерителя угловой скорости возможна только для трехосных измерителей с ортогонально расположенными осями. Применение известного способа для калибровки измерителей угловой скорости с числом измерительных осей, большим трех, приведет к существенному усложнению программного обеспечения измерителя, к увеличению быстродействия и объема «памяти» его вычислительного устройства, а следовательно, и к увеличению энергопотребления и стоимости систем управления КА.
Задачей настоящего изобретения является повышение оперативности и точности определения угловой скорости вращения и ориентации КА, уменьшение стоимости и энергопотребления систем управления угловым движением КА, возможности проведения калибровки измерителей угловой скорости с произвольным количеством одноосных измерителей.
Поставленная задача решается тем, что в способе калибровки измерителей угловой скорости бесплатформенной инерциальной системы ориентации космических аппаратов, заключающемся в выполнении трех последовательных калибровочных плоских вращений космического аппарата, вокруг осей крена, рыскания и тангажа на заданный угол, меньший 2π радиан, определении ориентации космического аппарата бесплатформенной инерциальной системой путем интегрирования кинематических уравнений по информации с измерителей угловой скорости, определении ориентации космического аппарата по измерениям системы астроизмерений перед началом и после окончания каждого из калибровочных разворотов, определении по информации с бесплатформенной инерциальной системы и системы астроизмерений ошибок бесплатформенной инерциальной системы, оценке и учете погрешностей измерителей угловой скорости вращения космического аппарата, а также компенсации влияния постоянных уходов измерителей угловой скорости как составляющей погрешности в их выходном сигнале, производят три последовательных калибровочных разворота вокруг осей крена, рыскания и тангажа на заданный угол, меньший π/4 радиан, перед первым калибровочным поворотом осуществляют стабилизацию космического аппарата в заданном положении, определяют приращение углового положения и угловое положение как аналитическое решение кинематических уравнений, определяют средние значения проекций скорости вращения космического аппарата на каждую из измерительных осей измерителя угловой скорости, например, как приращение интеграла проекции угловой скорости на соответствующую ось чувствительности, деленное на интервал времени вращения (стабилизации), определяют по средним значениям проекций скорости вращения космического аппарата, рассчитанным по астроизмерениям, проекции угловой скорости вращения на расчетные положения каждой из осей чувствительности измерителя угловой скорости, определяют для каждой измерительной оси невязки измеренных проекций угловой скорости вращения и рассчитанных по астроизмерениям, по невязкам на участке стабилизации определяют величины постоянных уходов по каждой из измерительных осей, по невязкам на участках калибровочных разворотов и рассчитанным значениям постоянных уходов определяют погрешности масштабных коэффициентов и погрешности установки по каждой из измерительных осей одноосных измерителей, корректируют измеренные по каждой из измерительных осей проекции угловой скорости на величины уходов, погрешностей масштабного коэффициента и установки одноосных измерителей.
Этот способ реализуется устройством, содержащим измерители угловой скорости, астроизмерительную систему, введены блок учета параметров калибровки, первым входом подключенный к выходу измерителей угловой скорости, вторым входом - к выходу блока расчета параметров калибровки, первым выходом - с входом блока интегрирования проекций угловой скорости на оси чувствительности одноосных измерителей угловой скорости, а вторым выходом - с первым входом блока расчета параметров углового движения, второй вход которого соединен с выходом астроизмерительной системы, блок расчета невязок, первым выходом присоединенный к первому входу блока расчета параметров калибровки, первым входом - к первому выходу блока запоминания, первый вход которого подключен к выходу блока интегрирования, второй вход - к выходу блока расчета параметров углового движения, третий вход - к первому выходу блока формирования программного движения, блок расчета нулевых сигналов, выходом соединенный со вторым входом блока расчета параметров калибровки, первым входом - со вторым выходом блока расчета невязок, вторым входом - со вторым выходом блока формирования программного движения, третий выход которого подключен к второму входу блока расчета невязок, а четвертый выход соединен с третьим входом блока расчета параметров калибровки.
На фиг.1 приведена функциональная блок-схема устройства для осуществления способа.
Устройство включает измерители угловой скорости (1), астроизмерительную систему (2), блок учета параметров калибровки (3), первым входом подключенный к выходу измерителей угловой скорости (1), вторым входом - к выходу блока расчета параметров калибровки (4), первым выходом - с входом блока интегрирования проекций угловой скорости (5) на оси чувствительности измерителей угловой скорости (1), а вторым выходом - с первым входом блока расчета параметров углового движения (6), второй вход которого соединен с выходом астроизмерительной системы (2), блок расчета невязок (8) первым выходом присоединенный к первому входу блока расчета параметров калибровки (4), первым входом - к первому выходу блока запоминания (9), первый вход которого подключен к выходу блока интегрирования (5), второй вход - к выходу блока расчета параметров углового движения (6), третий вход - к первому выходу блока формирования программного движения (7), блок расчета нулевых сигналов (10), выходом соединенный со вторым входом блока расчета параметров калибровки (4), первым входом - со вторым выходом блока расчета невязок (8), вторым входом - со вторым выходом блока формирования программного движения (7), третий выход которого подключен к второму входу блока расчета невязок (8), а четвертый выход - с третьим входом блока расчета параметров калибровки (4).
Устройство работает следующим образом. После включения устройства (фиг.1) в блоке формирования программного движения (7) формируется и выдается в систему стабилизации (на фиг.1 не указана) постоянное не изменяющееся во времени программное положение космического аппарата, например, в инерциальной системе координат. Система стабилизации по информации о текущих значениях параметров углового движения из блока (6) и программных параметрах из блока (7) формирует и выдает на исполнительные органы космического аппарата управляющие сигналы, обеспечивая тем самым стабилизацию космического аппарата в заданном программном положении. Текущие параметры углового движения космического аппарата рассчитываются в блоке (6) по информации с измерителей угловой скорости и астроизмерительной системы.
Угловое движение космического аппарата (связанной с космическим аппаратом системы координат - ССК) в инерциальной системе координат в соответствии с [3] описывается уравнением:
или в скалярном виде:
где
λ0, λ1, λ2, λ3 - составляющие кватерниона  , определяющего угловое положение ССК в ИСК;
, определяющего угловое положение ССК в ИСК;
ωx, ωy, ωz - проекции вектора абсолютной угловой скорости (ω) на приборные оси OXПYПZП ИУС.
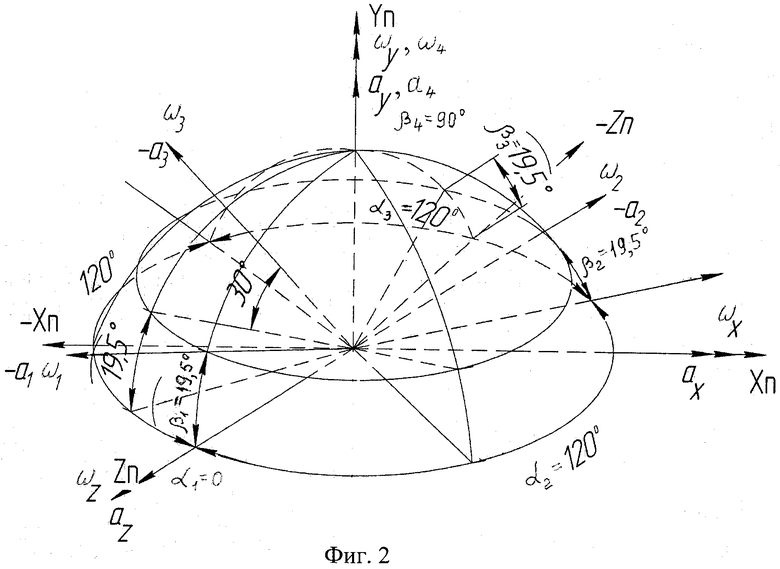
Приборная система координат ИУС, так же как и астроизмерительной системы устанавливаются в ССК космического аппарата с некоторой погрешностью. При наличии в ИУС трех одноосных измерителей угловой скорости последние устанавливают ортогонально, и они с точностью до погрешностей установки совпадают с приборной системой координат. При включении в состав ИУС с целью повышения надежности и точности, например, четырех одноосных измерителей оси чувствительности измерителей устанавливают таким образом, чтобы при отказе одного любого одноосного измерителя можно было образовать конфигурацию из трех оставшихся одноосных измерителей для определения проекций угловой скорости на приборные оси ИУС. Один из возможных вариантов расположения одноосных измерителей в четырехосном ИУС приведен на фиг.2.
Изменение ускорений в процессе вращения космического аппарата происходит периодически с периодом работы системы стабилизации. Величина периода выбирается на этапе проектирования и составляет, как правило, от одной до нескольких десятых секунды. На интервале стабилизации, при использовании для управления инерционных исполнительных органов, угловое движение космического аппарата равноускоренное и эквивалентно движению с постоянной угловой скоростью, равной средней скорости на интервале стабилизации. Средняя угловая скорость может быть получена как Λ периода стабилизации или с целью повышения точности рассчитана прибором как среднее нескольких измерений за период стабилизации. Подставив в (1) средние значения проекций угловой скорости вращения космического аппарата, получим из (1) кинематические уравнения вращения на текущем периоде стабилизации:
Система дифференциальных уравнений (2) имеет аналитическое решение:

m=1, 2, 3, 
Δt - продолжительность периода стабилизации.
Измерив с помощью астроизмерительной системы угловое положение космического аппарата Λн в некоторый момент времени tн и рассчитав приращения углового положения ΔΛn на каждом периоде стабилизации в соответствии с выражениями (3), можно получить текущее угловое положение Λn в соответствии с выражением:
8
На момент начала участка стабилизации космического аппарата в заданном из блока (7) программном положении по информации из блока (7) в блоке (9) производится запоминание кватерниона ориентации из блока (6), измеренного астроизмерительной системой, и величин интегралов проекций скорости вращения на измерительные оси ИУС из блока (5). В блоке (5) в течение всего времени работы системы производится интегрирование проекций угловой скорости вращения космического аппарата на измерительные оси одноосных измерителей. Средние значения проекций угловой скорости на измерительные оси одноосных измерителей (1) на каждом такте работы системы стабилизации поступают в блок (3). В блоке (3), при наличии (поступлении из блока (4)) параметров калибровки, производится коррекция проекций угловой скорости на измерительные оси одноосных измерителей и расчет проекций угловой скорости на приборные оси. Из блока (3) проекции угловой скорости на оси одноосных измерителей (1) поступают в блок интегрирования (5), а проекции угловой скорости на приборные оси в блок (6) для расчета кватерниона ориентации на текущем (n-м) периоде работы системы стабилизации.
На момент окончания участка стабилизации космического аппарата в заданном из блока (7) программном положении по информации из блока (7) в блоке (9) производится запоминание кватерниона ориентации из блока (6), измеренного астроизмерительной системой, и величин интегралов проекций скорости вращения на измерительные оси ИУС из блока (5). Далее по информации из блока (7) об окончании участка стабилизации в заданном программном положении, информации о положении космического аппарата на моменты начала и окончания участка стабилизации по измерениям астроизмерительной системы и приращениям интегралов проекций угловой скорости на измерительные оси одноосных измерителей ИУС из блока (9) в блоке (8) рассчитываются невязки δωj в соответствии с выражениями:

где
j=1, 2, …, κ - номер одноосного измерителя угловой скорости в ИУС (κ≥3),
 - рассчитанная по измерениям с j одноосного измерителя угловой скорости средняя угловая скорость на его измерительную ось, установленную с некоторой неизвестной погрешностью в ССК:
- рассчитанная по измерениям с j одноосного измерителя угловой скорости средняя угловая скорость на его измерительную ось, установленную с некоторой неизвестной погрешностью в ССК:
Δt - продолжительность участка стабилизации,
 - интеграл проекции угловой скорости на момент начала участка стабилизации j одноосного измерителя ИУС,
- интеграл проекции угловой скорости на момент начала участка стабилизации j одноосного измерителя ИУС,
 - интеграл проекции угловой скорости на момент окончания участка стабилизации j одноосного измерителя ИУС,
- интеграл проекции угловой скорости на момент окончания участка стабилизации j одноосного измерителя ИУС,
 - рассчитанная по информации с астроизмерительной системы проекция средней угловой скорости на расчетное положение j измерительной оси одноосного измерителя ИУС,
- рассчитанная по информации с астроизмерительной системы проекция средней угловой скорости на расчетное положение j измерительной оси одноосного измерителя ИУС,

αjx, αjy, αjz - направляющие косинусы между расчетным (проектным) положением j измерительной оси одноосного измерителя ИУС и приборными осями OX, OY, OZ астроизмерительной системы,
 - проекции вектора абсолютной угловой скорости вращения космического аппарата на оси приборной системы координат астроизмерительной системы,
- проекции вектора абсолютной угловой скорости вращения космического аппарата на оси приборной системы координат астроизмерительной системы,

 - сопряженный кватернион ориентации космического аппарата, измеренный на момент начала участка стабилизации в заданном программном положении астроизмерительной системой,
- сопряженный кватернион ориентации космического аппарата, измеренный на момент начала участка стабилизации в заданном программном положении астроизмерительной системой,
 - кватернион ориентации космического аппарата, измеренный на момент окончания участка стабилизации в заданном программном положении астроизмерительной системой.
- кватернион ориентации космического аппарата, измеренный на момент окончания участка стабилизации в заданном программном положении астроизмерительной системой.
После расчета в блоке (8) невязок угловых скоростей для каждого одноосного измерителя по информации из блока (7) в блоке (10) производится расчет нулевых сигналов по каждой j измерительной оси следующим образом.
Известно, что выходной сигнал одноосного измерителя угловой скорости может быть записан в виде:

где
 - случайная (шумовая) составляющая измерения угловой скорости с нулевым математическим ожиданием (принимается равной нулю, поскольку ωj определяется по приращениям интегралов),
- случайная (шумовая) составляющая измерения угловой скорости с нулевым математическим ожиданием (принимается равной нулю, поскольку ωj определяется по приращениям интегралов),
 - нулевой сигнал (уход) одноосного измерителя угловой скорости,
- нулевой сигнал (уход) одноосного измерителя угловой скорости,
δKj - мультипликативная составляющая погрешности измерения угловой скорости, вызванная погрешностью масштабного коэффициента каждого одноосного измерителя,
 - проекция скорости вращения космического аппарата на истинное положение измерительной оси одноосного измерителя, отличающееся от расчетного (проектного) положения на неизвестные погрешности установки δαj, δβj.
- проекция скорости вращения космического аппарата на истинное положение измерительной оси одноосного измерителя, отличающееся от расчетного (проектного) положения на неизвестные погрешности установки δαj, δβj.
Для одноосных измерителей оси которых по направлениям не совпадают с направлениями осей приборной системы координат, погрешности установки δαj, δβj малые величины. Для одноосного измерителя, измерительная ось которого совпадает с направлением одной из осей приборной системы координат, как для конфигурации ИУС, представленного на фиг.2, один из углов погрешности установки, например, δβj выберем малым и положительным (отклонение от приборной оси), второй угол погрешности установки (вращение вокруг приборной оси) в этом случае может принимать произвольное значение в диапазоне от 0° до 360°.
С учетом сказанного проекции скорости вращения космического аппарата на истинные положения измерительных осей  одноосных измерителей, отличающихся от расчетных (проектных) положений на неизвестные малые погрешности установки δαj, δβj, например, для представленной на фиг.2 конфигурации, могут быть записаны в виде:
одноосных измерителей, отличающихся от расчетных (проектных) положений на неизвестные малые погрешности установки δαj, δβj, например, для представленной на фиг.2 конфигурации, могут быть записаны в виде:

Для одноосного измерителя, расчетное направление измерительной оси которого совпадает с направлением приборной оси OYn, проекция скорости вращения запишется в виде:

где
j=1, 2, 3,
 - проекции скорости вращения космического аппарата на измерительные оси одноосных измерителей,
- проекции скорости вращения космического аппарата на измерительные оси одноосных измерителей,
αj, βj - расчетные (проектные) углы установки измерительных осей одноосных измерителей,
δαj, δβj, δβ4, α4 - неизвестные погрешности углов установки измерительных осей одноосных измерителей,
ωx, ωy, ωz - проекции скорости вращения космического аппарата на приборные оси астроизмерительной системы.
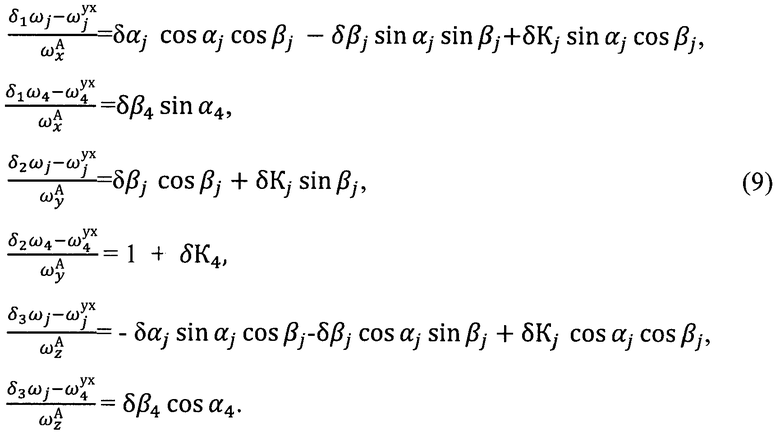
С учетом (4, 5, 6) можно получить уравнения разностей (невязок) проекций скорости вращения космического аппарата на каждую j измерительную ось и ее расчетное положение (δωj), которые будут представлять собой функции скорости вращения космического аппарата, инструментальных погрешностей одноосных измерителей  и погрешностей их установки (δαj, δβj, δβ4, α4) относительно расчетных (проектных) положений. Эти уравнения для представленной на фиг.2 конфигурации и исключения величин второго порядка малости запишутся в виде:
и погрешностей их установки (δαj, δβj, δβ4, α4) относительно расчетных (проектных) положений. Эти уравнения для представленной на фиг.2 конфигурации и исключения величин второго порядка малости запишутся в виде:
На участке стабилизации космического аппарата в заданном программном положении проекции его средней скорости вращения на измерительные оси одноосных измерителей, определяемые по приращениям углового положения астроизмерительной системой, будут малыми величинами, близкими к нулю. Учитывая малость величин  и исключив величины второго порядка малости, уравнения (4) для участка стабилизации в заданном программном положении будут иметь вид:
и исключив величины второго порядка малости, уравнения (4) для участка стабилизации в заданном программном положении будут иметь вид:

Т.е. нулевые сигналы (уходы) по каждой j измерительной оси будут равны разностям проекций скорости вращения космического аппарата на каждую j измерительную ось и ее расчетное (проектное) положение. Нулевые сигналы по каждой измерительной оси рассчитываются в блоке (10) и используются в блоке (4) при расчете параметров калибровки δKj, δαj, δβj. Для расчета параметров калибровки в блоке (4) блок (7) организует три последовательных плоских поворота:
1-ωx≠0, ωy≈ωz≈0;
2-ωy≠0, ωx≈ωz≈0;
3-ωz≠0, ωx≈ωy≈0.
Для каждого программного поворота в блоке (8) рассчитываются невязки δ1ωj, δ2ωj, δ3ωj и средние значения проекций скорости вращения космического аппарата  аналогично тому, как это проводилось на участке стабилизации в заданном программном положении. Величины углов программных поворотов и длительность участка стабилизации определяются требуемой точностью определения угловой скорости вращения космического аппарата, которая зависит от точности определения приращения углового положения астроизмерительной системой и шумовой составляющей ошибки измерения угловой скорости ИУС. Для обеспечения точности необходимо, чтобы за время выполнения соответствующего участка интеграл от шумовой составляющей ошибки измерения угловой скорости ИУС был равен ≈0. Это условие выполняется для современных ИУС на интервале времени 1-2 минуты.
аналогично тому, как это проводилось на участке стабилизации в заданном программном положении. Величины углов программных поворотов и длительность участка стабилизации определяются требуемой точностью определения угловой скорости вращения космического аппарата, которая зависит от точности определения приращения углового положения астроизмерительной системой и шумовой составляющей ошибки измерения угловой скорости ИУС. Для обеспечения точности необходимо, чтобы за время выполнения соответствующего участка интеграл от шумовой составляющей ошибки измерения угловой скорости ИУС был равен ≈0. Это условие выполняется для современных ИУС на интервале времени 1-2 минуты.
Программная скорость последовательного вращения космического аппарата по крену, рысканию и тангажу должна быть на 2-3 порядка больше средней скорости вращения космического аппарата  относительно двух других осей. Это необходимо для того, чтобы в (4) можно было члены уравнения, не содержащие программную скорость, отнести к членам второго порядка малости. Т.е. программная скорость может быть выбрана в диапазоне ≈ от 0,01°/c до 0,1 °/c.
относительно двух других осей. Это необходимо для того, чтобы в (4) можно было члены уравнения, не содержащие программную скорость, отнести к членам второго порядка малости. Т.е. программная скорость может быть выбрана в диапазоне ≈ от 0,01°/c до 0,1 °/c.
Погрешность измерения приращения углового положения космического аппарата астроизмерительной системой δφ составляет ≈7 угл. с, и, следовательно, погрешность определения угловой скорости по астроизмерениям δω будет равна:
где
Δt - продолжительность участка стабилизации или вращения с программной скоростью.
При требуемой точности определения скорости вращения по астроизмерениям, например, равной 1·10-5 °/c Δt=200 с. При длительности программного поворота 200 с и скорости вращения ≈0,1 °/с величина угла разворота будет не более 20°. Угол программного поворота может быть уменьшен за счет уменьшения программной скорости вращения и повышения точности определения приращения углового положения астроизмерительной системой.
После завершения программных поворотов из системы уравнений (7) при исключении величин второго порядка малости можно получить 12 независимых уравнений для определения 12 неизвестных величин известным способом:
Определяемые в блоке (4) из уравнений (9) параметры калибровки δKj, δК4, δαj, δβj, δβ4, α4 (j=l, 2, 3) и в блоке (10) нулевые сигналы  используются в блоке (3) для коррекции проекций скорости вращения космического аппарата, измеряемых одноосными измерителями и рассчитываемых значений проекций скорости вращения на приборные оси астроизмерительной системы. Исключение постоянных составляющих ошибок измерения проекций угловой скорости на измерительные оси одноосных измерителей с учетом (4) производится в соответствии с выражениями:
используются в блоке (3) для коррекции проекций скорости вращения космического аппарата, измеряемых одноосными измерителями и рассчитываемых значений проекций скорости вращения на приборные оси астроизмерительной системы. Исключение постоянных составляющих ошибок измерения проекций угловой скорости на измерительные оси одноосных измерителей с учетом (4) производится в соответствии с выражениями:
Исключение погрешностей измерения, вызванных погрешностями установки одноосных измерителей, производится в блоке (3) при расчете проекций скорости вращения на приборные оси астроизмерительной системы известным способом. При этом для расчета проекций скорости на приборные оси астроизмерительной системы задаются не расчетные (проектные) положения одноосных измерителей, а истинные положения с учетом определенных погрешностей их установки δαj, δβj.
Таким образом, предложенное изобретение за счет проведения трех последовательных калибровочных разворотов вокруг осей крена, рыскания и тангажа на заданный угол, меньший π/4 радиан, стабилизации космического аппарата в заданном программном положении перед первым калибровочным поворотом, определения приращения углового положения и углового положения как аналитического решения кинематических уравнений, определения средних значений проекций скорости вращения космического аппарата на каждую из измерительных осей измерителя угловой скорости, например, как приращение интеграла проекции угловой скорости на соответствующую ось чувствительности, деленное на интервал времени вращения (стабилизации), определения по средним значениям проекций скорости вращения космического аппарата, рассчитанным по астроизмерениям, проекций угловой скорости вращения на расчетные положения каждой из осей чувствительности измерителя угловой скорости, определения для каждой измерительной оси невязок измеренных проекций угловой скорости вращения и рассчитанных по астроизмерениям, определения на участке стабилизации постоянных уходов по каждой из измерительных осей, определения по невязкам, полученным в каждом из трех программных поворотов и рассчитанным значениям постоянных уходов углов погрешностей установки и погрешность масштабного коэффициента для каждой из измерительных осей, коррекции измеренных по каждой из измерительных осей проекций угловой скорости на величины уходов, масштабного коэффициента и погрешностей установки позволяет улучшить характеристики систем ориентации космических аппаратов по повышению оперативности и точности определения угловой скорости вращения и ориентации космического аппарата, уменьшению стоимости и энергопотребления систем управления угловым движением КА.
Литература
1. Патент США №4012018, кл. B64G 1/10, 1978 г.
2. Патент РФ №2092402, кл. B64G 1/24, 1992 г. - прототип.
3. В.Н.Бранец, И.П.Шмыглевский. Применение кватернионов в задачах ориентации твердого тела, М.: Наука, 1973 г.
Группа изобретений относится к области космической техники, а именно к способу калибровки измерителей угловой скорости бесплатформенных интегральных систем ориентации космических аппаратов и к устройству, которое его реализует. Способ калибровки заключается в выполнении трех последовательных калибровочных плоских вращений космического аппарата, вокруг осей крена, рыскания и тангажа на заданный угол. Перед первым калибровочным поворотом осуществляют стабилизацию космического аппарата в заданном положении, определяют приращение углового положения и угловое положение как аналитическое решение кинематических уравнений и средние значения проекций скорости вращения космического аппарата на каждую из измерительных осей измерителя угловой скорости. По невязкам на участках программных поворотов и рассчитанным значениям постоянных уходов определяют погрешности масштабных коэффициентов и погрешности установки каждой из измерительных осей одноосных измерителей. Устройство калибровки содержит измерители угловой скорости, астроизмерительную систему, блок учета параметров калибровки, подключенный к измерителю угловой скорости, к блоку расчета параметров калибровки, к блоку интегрирования проекций угловой скорости на оси чувствительности измерителей угловой скорости и к блоку расчета параметров углового движения. Блок расчета параметров углового движения соединен с астроизмерительной системой. Блок расчета невязок присоединен к блоку расчета параметров калибровки и к блоку запоминания. Блок запоминания подключен к блоку интегрирования, к блоку расчета параметров углового движения и к блоку формирования программного движения. Блок расчета нулевых сигналов соединен с блоком расчета параметров калибровки, с блоком расчета невязок и с блоком формирования программного движения. Блок формирования программного движения подключен к блоку расчета невязок и к блоку расчета параметров калибровки. Достигается повышение оперативности и точности определения угловой скорости вращения и ориентации космического аппарата. 2 н.п. ф-лы, 2 ил.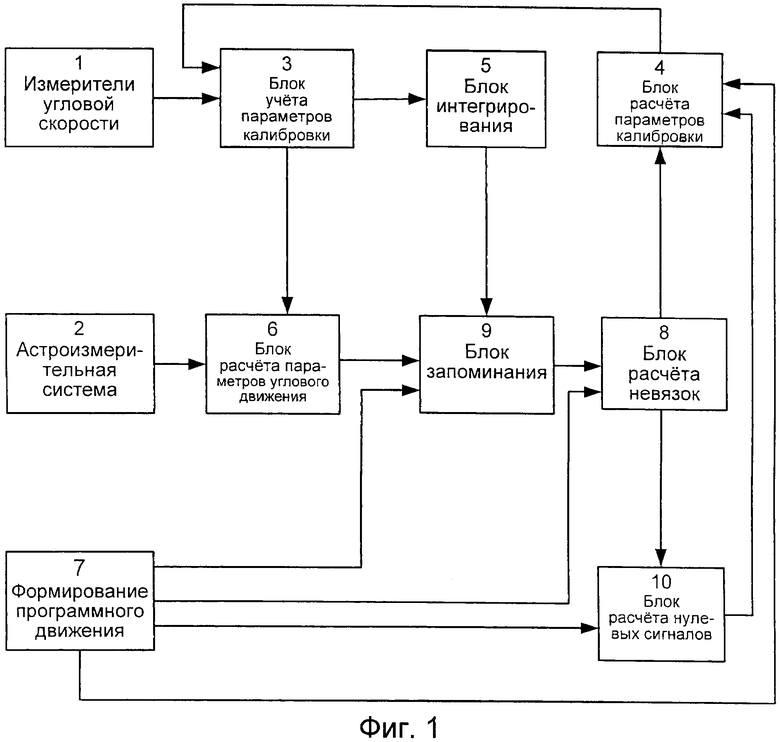
1. Способ калибровки измерителей угловой скорости бесплатформенных инерциальных систем ориентации космических аппаратов, заключающийся в выполнении трех последовательных калибровочных плоских вращений космического аппарата, вокруг осей крена, рыскания и тангажа на заданный угол, меньший 2π радиан, определении ориентации космического аппарата бесплатформенной инерциальной системой путем интегрирования кинематических уравнений по информации с измерителей угловой скорости, определении ориентации космического аппарата по измерениям системы астроизмерений перед началом и после окончания каждого из калибровочных разворотов, определении по информации с бесплатформенной инерциальной системы и системы астроизмерений ошибок бесплатформенной инерциальной системы, оценке и учете погрешностей измерителей угловой скорости вращения космического аппарата, а также компенсации влияния постоянных уходов измерителей угловой скорости как составляющей погрешности в их выходном сигнале, отличающийся тем, что производят три последовательных калибровочных разворота вокруг осей крена, рыскания и тангажа на заданный угол, меньший π/4 радиан, перед первым калибровочным поворотом осуществляют стабилизацию космического аппарата в заданном положении, определяют приращение углового положения и угловое положение как аналитическое решение кинематических уравнений, определяют средние значения проекций скорости вращения космического аппарата на каждую из измерительных осей измерителя угловой скорости, например, как приращение интеграла проекции угловой скорости на соответствующую ось чувствительности деленное на интервал времени вращения (стабилизации), определяют по средним значениям проекций скорости вращения космического аппарата, рассчитанным по астроизмерениям, проекции угловой скорости вращения на расчетные положения каждой из осей чувствительности измерителя угловой скорости, определяют для каждой измерительной оси невязки измеренных проекций угловой скорости вращения и рассчитанных по астроизмерениям, по невязкам на участке стабилизации определяют величины постоянных уходов по каждой из измерительных осей, по невязкам на участках программных поворотов и рассчитанным значениям постоянных уходов определяют погрешности масштабных коэффициентов и погрешности установки каждой из измерительных осей одноосных измерителей, корректируют измеренные по каждой из измерительных осей проекции угловой скорости на величины постоянных уходов, погрешностей масштабных коэффициентов и погрешностей установки.
2. Устройство калибровки измерителей угловой скорости бесплатформенных инерциальных систем ориентации космических аппаратов, содержащее измерители угловой скорости, астроизмерительную систему, отличающееся тем, что введены блок учета параметров калибровки, первым входом подключенный к выходу измерителей угловой скорости, вторым входом к выходу блока расчета параметров калибровки, первым выходом с входом блока интегрирования проекций угловой скорости на оси чувствительности измерителей угловой скорости, а вторым выходом с первым входом блока расчета параметров углового движения, второй вход которого соединен с выходом астроизмерительной системы, блок расчета невязок, первым выходом присоединенный к первому входу блока расчета параметров калибровки, первым входом к первому выходу блока запоминания, первый вход которого подключен к выходу блока интегрирования, второй вход к выходу блока расчета параметров углового движения, третий вход к первому выходу блока формирования программного движения, блок расчета нулевых сигналов, выходом соединенный со вторым входом блока расчета параметров калибровки, первым входом со вторым выходом блока расчета невязок, вторым входом со вторым выходом блока формирования программного движения, третий выход которого подключен ко второму входу блока расчета невязок, а четвертый выход с третьим входом блока расчета параметров калибровки.
| СПОСОБ КАЛИБРОВКИ ГИРОИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЕЙ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИОННОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2092402C1 |
| RU 2004107173 A, 20.10.2005 | |||
| US 6152403 A, 28.11.2000 | |||
| 0 |
|
SU375496A1 | |

