ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение касается систем передачи с расширенным спектром, в частности с расширением спектра методом прямой последовательности, который используется в системах передачи с кодовым разделением каналов (CDMA). Изобретение особенно уместно для спутниковых навигационных систем, таких как глобальная система определения местоположения GPS, российская спутниковая навигационная система ГЛОНАСС и европейская спутниковая навигационная система Galileo, развертываемая в настоящее время, которые используют сигналы с кодовым разделением каналов.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Имеются три типа систем передачи с расширенным спектром, использующих разные способы расширения спектра сигналов. Этими способами являются следующие.
1. Скачкообразная перестройка частоты несущей - сигнал быстро переключается псевдослучайным образом между различными частотами в пределах ширины полосы используемых частот, и приемник заранее знает, где найти сигнал в любой данный момент.
2. Скачкообразная перестройка во времени - сигнал передают в коротких пакетах псевдослучайно, и приемник заранее знает, когда ожидать пакет.
3. "Прямая последовательность" - цифровые данные непосредственно кодируют с намного более высокой частотой. Код генерируют псевдослучайно, приемник знает, как генерировать тот же самый код, и определяет корреляцию принимаемого сигнала с этим кодом, чтобы извлечь данные.
Вообще, такие системы передачи с расширенным спектром отличаются тремя основными элементами:
i) сигнал занимает полосу, которая намного превышает полосу частот, необходимую для обычной передачи информации, что обеспечивает много преимуществ, такие как устойчивость к помехам и преднамеренным помехам, а также многопользовательский доступ;
ii) полоса частот расширяется посредством кода, который не зависит от данных; независимость кода отличает такую систему от стандартных схем модуляции, в которых модуляция данными всегда несколько расширяет спектр;
iii) приемник синхронизируется с кодом, чтобы восстановить данные. Использование независимого кода и синхронного приема позволяет многочисленным пользователям одновременно получать доступ к одной и той же полосе частот.
Для защиты сигнала используемый код является псевдослучайным. Он кажется случайным, но фактически является детерминированным, чтобы приемник мог восстановить этот код для синхронного детектирования. Этот псевдослучайный код называют также псевдошумовым (PN).
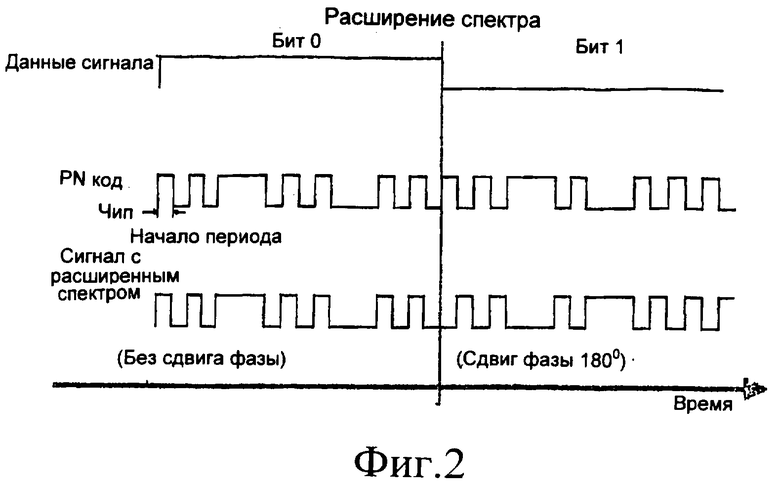
Настоящее изобретение, в частности, относится к передаче с кодовым разделением каналов, которая является формой передачи с расширением спектра прямой последовательностью. Метод кодового разделения каналов может использоваться для передачи речи в цифровом виде, каналов цифровой сети с интеграцией служб (ISDN), данных модема и т.д. Такая передача показана на фиг.1, где изображена в упрощенном виде система с кодовым разделением каналов и расширением спектра прямой последовательностью. Для ясности показан один канал, работающий только в одном направлении. Фиг.2 иллюстрирует, как информационные данные модулируют псевдослучайный код. Общие принципы работы такой системы с кодовым разделением каналов известны и здесь не будут рассматриваться подробно. Однако можно указать следующее.
А) Передача сигнала состоит из следующих шагов (фиг.1А, фиг.2):
1) генерируют псевдослучайный код, различный для каждого канала и каждого последовательного соединения;
2) данные информационного "сигнала" модулируют псевдослучайный код (информационные данные "расширяют" по спектру, фиг.2);
3) результирующий сигнал модулирует несущую;
4) модулированную несущую усиливают и передают по радио.
В) прием сигнала состоит из следующих шагов (фиг.1В):
1) несущую принимают и усиливают;
2) принимаемый сигнал смешивают с несущей местного генератора, чтобы восстановить цифровой сигнал с расширенным спектром;
3) генерируют псевдослучайный код, соответствующий ожидаемому сигналу;
4) приемник входит в синхронизм с принимаемым кодом и синхронизирует с ним по фазе собственный код;
5) определяют корреляцию принимаемого сигнала с генерированным кодом, извлекая информационные данные.
Спутниковые навигационные системы, такие как GPS и Galileo, используют систему передачи с кодовым разделением каналов. Для простоты в последующем тексте внимание сосредоточено на спутниковых навигационных системах, причем в качестве конкретного примера взята система GPS.
В настоящее время система GPS содержит более 24 спутников, из которых обычно от 8 до 16 одновременно "видны" приемнику. Эти спутники передают, например, орбитальные параметры, информацию о времени передачи и т.д. Приемник, используемый для определения местоположения, обычно вычисляет свое местоположение, определяя время распространения сигнала, передаваемого одновременно с нескольких спутников, принадлежащих системе определения местоположения, до приемника. Для определения местоположения приемник обычно должен принимать сигнал не менее четырех спутников, находящихся в зоне "видимости", чтобы вычислить местоположение.
Каждый спутник системы GPS передает на несущей частоте 1575,42 МГц "дальномерный" сигнал, называемый L1. Эта частота также обозначается как 154f0, где f0=10,23 МГц. Кроме того, спутники передают другой "дальномерный" сигнал, называемый L2 или 120f0, на несущей частоте 1227,6 МГц. Однако сигнал L2 не находится в гражданском использовании и не будет здесь подробно описан.
На спутнике выполняется модуляция этих сигналов по крайней мере одной псевдослучайной последовательностью. Эта псевдослучайная последовательность различна для каждого спутника и каждого "дальномерного" сигнала каждого спутника. В результате модуляции формируется модулированный кодом широкополосный "дальномерный" сигнал. Используемый метод модуляции позволяет различать в приемнике сигналы, передаваемые различными спутниками, хотя несущие частоты, используемые при передаче, по существу одинаковы (то есть используется кодовое разделение каналов).
На каждом спутнике псевдослучайная последовательность, используемая для модуляции сигнала L1, является, например, так называемым кодом С/А ("грубым" кодом), который представляет собой код из семейства кодов Голда. Каждый спутник системы GPS передает сигнал, используя индивидуальный код С/А. Эти коды формируются как сумма по модулю 2 двух 1023-символьных двоичных последовательностей. Первая двоичная последовательность G1 формируется с помощью полинома X10+X3+1, а вторая двоичная последовательность G2 формируется задержкой полинома X10+X9+X8+X6+X3+X2+1, различной для каждого спутника. Это позволяет формировать различные коды С/А идентичными генераторами кода. Таким образом, коды С/А являются двоичными кодами, частота чипов (элементов) которых в системе GPS составляет 1,023 МГц.
Код С/А содержит 1023 чипа, период кода составляет 1 мс. Несущая сигнала L1 дополнительно модулируется навигационной информацией со скоростью 50 бит/с. Навигационная информация включает информацию о работоспособности ("здоровье") спутника, орбитальные параметры, информацию о времени системы GPS и т.д.
Все спутники начинают передачу их кода С/А в один и тот же момент времени, например, в начале недели. Как только код С/А каждого спутника передан, этот код С/А повторяется.
Во время эксплуатации спутники контролируют состояние своего оборудования. Спутники могут использовать, например, так называемые "сторожевые" операции, чтобы обнаруживать и сообщать о возможных неисправностях в оборудовании. Ошибки и сбои могут быть мгновенными или более долговременными. На основании данных о "здоровье" некоторые из неисправностей могут компенсироваться, или же информация, передаваемая работающим со сбоями спутником, может полностью игнорироваться. Кроме того, в ситуации, когда сигнал может приниматься более чем от четырех спутников, информация, полученная от различных спутников, может взвешиваться по-разному на основании, например, отношения несущая/шум. Таким образом можно минимизировать влияние на измерения возможных ошибок, вызываемых спутниками, которые имеют низкий уровень сигнала.
Чтобы обнаруживать сигналы спутников и идентифицировать спутники, приемник должен выполнить вхождение в синхронизм, при этом приемник в данный момент времени ищет сигнал каждого спутника и пытается синхронизироваться с этим сигналом, чтобы можно было выполнить измерение псевдодальности (расстояния до спутника). Если уровень сигнала очень низок и сигнал нельзя демодулировать, все еще возможно выполнить измерение псевдодальности и вычислить с ее помощью местоположение приемника, если доступна эфемеридная информация.
Вхождение в синхронизм с сигналом GPS выполняется путем последовательной подстройки относительного положения во времени (называемого фазой кода) хранящейся копии кодовой последовательности (синхронизации) в приемнике системы GPS относительно принимаемого сигнала, передаваемого по радио спутником, и наблюдения результата корреляции. Точность синхронизации фазы кода должна составлять менее одного чипа кодовой последовательности для любого измеримого отклика. Это может означать поиск отклика путем проверки до 1023 возможных позиций фазы кода. Однако помощь сети может ускорить этот процесс (см. ниже).
Приемник системы определения местоположения должен выполнять вхождение в синхронизм, например, когда его включают, а также в ситуации, когда приемник в течение длительного времени был не способен принимать сигнал какого-либо спутника. Такая ситуация может легко возникнуть, например, в переносных устройствах, потому что устройство перемещается, и антенна устройства не всегда находится в оптимальном положении относительно спутников, из-за чего ослабляется интенсивность сигнала, поступающего в приемник. Также в городах здания влияют на сигнал, который необходимо принимать, и, кроме того, может возникать так называемое многолучевое распространение, при котором передаваемый сигнал приходит к приемнику по различным путям, например, непосредственно от спутника (находящегося в прямой видимости), а также путем отражения от зданий. Это многолучевое распространение является причиной того, что один и тот же сигнал принимается как несколько сигналов с разными фазами.
Вслед за вхождением в синхронизм (и не рассматриваемой здесь коррекцией доплеровского сдвига частоты, принимающей во внимание относительное перемещение спутников и приемника) устройство определения местоположения в приемнике выполняет две основные функции.
1. Вычисление псевдодальности между приемником и различными спутниками системы GPS.
2. Определение местоположения приемника с использованием расчетных псевдодальностей и данных о местоположении спутников. Данные о местоположении спутников каждый раз могут быть рассчитаны на основе эфемерид, принимаемых со спутников.
Расстояния до спутников называют псевдодальностями, потому что в приемнике время точно не известно. Определение местоположения и времени повторяют до тех пока, пока не будет достигнута достаточная точность в отношении времени и местоположения. Поскольку время с абсолютной точностью не известно, местоположение и время необходимо определять, например, линеаризацией системы уравнений для каждой новой итерации. Псевдодальность может быть рассчитана измерением псевдозадержек между сигналами различных спутников.
Почти все известные приемники системы GPS используют корреляционные методы для вхождения в синхронизм с кодом (синхронизации), а также для слежения. В приемнике системы определения местоположения эталонные коды синхронизации ref(k), то есть псевдослучайные последовательности для различных спутников, хранят или генерируют локально. Принимаемый сигнал подвергают преобразованию в сигнал промежуточной частоты (преобразованию с понижением частоты), после чего приемник умножает принимаемый сигнал на хранящуюся псевдослучайную последовательность. Сигнал, полученный в результате умножения, интегрируют или фильтруют фильтром нижних частот, при этом результатом являются данные о том, содержит ли принимаемый сигнал сигнал, передаваемый конкретным спутником.
Умножение повторяют в приемнике так, чтобы каждый раз фаза псевдослучайной последовательности (кода синхронизации), хранящейся в приемнике, смещалась. Правильная фаза выводится из результата корреляции, предпочтительно так, что правильная фаза соответствует самому большому результату корреляции. Таким образом приемник правильно синхронизируется с принимаемым сигналом. После завершения синхронизации кода следующими шагами являются настройка частоты и фазовая синхронизация.
Вышеупомянутые вхождение в синхронизм и процесс подстройки частоты должны выполняться для каждого сигнала спутника, принимаемого приемником. Некоторые приемники могут иметь несколько каналов приема, при этом в каждом канале приема в данный момент времени делается попытка синхронизироваться с сигналом одного спутника и узнать информацию, передаваемую этим спутником.
Приемник системы определения местоположения принимает информацию, передаваемую спутниками, и выполняет определение местоположения на основе принимаемой информации. Для определения местоположения приемник должен принимать сигналы, передаваемые по меньшей мере четырьмя различными спутниками, чтобы найти координаты х, y, z и данные времени. Принимаемая навигационная информация сохраняется в памяти, и эта сохраненная информация может использоваться, чтобы выяснить, например, эфемеридные данные спутников.
Как упомянуто ранее, известны сети (например, сотовые сети связи, которые могут использовать технологию передачи GSM, PDC, CDMA, WCDMA, CDMA2000 и т.д.), которые помогают приемникам входить в синхронизм с сигналами от одного или нескольких спутников, чтобы ускорить этот процесс вхождения в синхронизм. Так, вместо того, чтобы начинать процесс синхронизации кода с произвольной битовой позиции в псевдослучайной кодовой последовательности (синхронизации), исходная точка для синхронизации между принимаемым сигналом и хранящейся/генерируемой псевдослучайной кодовой последовательностью (синхронизации) основывается на информации, которая предоставляется сетью.
В настоящее время сети помогают приемникам систем определения местоположения в поиске фазы кода путем предоставления позиции в генерируемом/хранящемся коде (синхронизации), которая должна быть использована как исходная позиция в процессе корреляции, на базе длины последовательности. Таким образом, например, сеть сообщает, что исходная позиция кода синхронизации должна соответствовать позиции 659 от начала кодовой последовательности.
Исходная точка является действительной только определенное время, и это время действительности также сообщается при передаче сетью данных помощи. Кроме того, сеть должна так или иначе предоставлять приемнику данные о времени (или верить, что приемник их уже имеет). Однако такие способы передачи времени сами по себе не являются предметом настоящего изобретения, хотя они и могут использоваться в связи с настоящим изобретением. После получения информации об исходной точке фазы кода в некоторый момент времени и данных текущего времени приемник может вычислить исходную точку фазы кода для текущего момента.
Также предоставляется интервал допустимой погрешности. Он также задается относительно длины последовательности. Таким образом, исходная позиция может быть позицией 659±8 длин чипа кодовой последовательности. Интервал допустимой погрешности имеет отношение к углу места спутника. Это является следствием того факта, что обычно с точки зрения поставщика услуг, обеспечивающего содействие вхождению в синхронизм, погрешность измерения местоположения удаленного приемника больше, чем погрешность измерения высоты. Поэтому интервал погрешности при содействии вхождению в синхронизм больше для тех спутников, которые находятся низко над горизонтом.
Система GPS использует псевдослучайный код фиксированной длины (1023 чипа), то есть передатчик каждого спутника модулирует свой сигнал уникальным псевдослучайным кодом одинаковой длины. Система Galileo может использовать псевдослучайный код переменной длины, или же она может использовать код постоянной длины, но фактическая длина кода может отличаться от длины кода системы GPS.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно первому аспекту настоящее изобретение предлагает модуль сигнализации о фазе кода, выполненный с возможностью предоставления сигнала фазы кода для содействия вхождению в синхронизм с сигналом с расширенным спектром, сформированным методом прямой последовательности и принимаемым приемным модулем от передающего модуля,
при этом сигнал фазы кода предназначен для использования приемным модулем для синхронизации фазы кода синхронизации, формируемого в приемном модуле, с фазой модулирующего кода сигнала с расширенным спектром, принимаемого приемным модулем, где кодовая последовательность синхронизации соответствует модулирующей кодовой последовательности,
при этом модуль сигнализации о фазе кода выполнен с возможностью предоставления сигнала времени фазы кода, представляющего временной сдвиг кода синхронизации относительно опорного времени, которое соответствует времени передачи определенной опорной части модулирующего кода сигнала с расширенным спектром, а временной сдвиг соответствует времени передачи передаваемой впоследствии сдвинутой части модулирующего кода сигнала с расширенным спектром.
Сигнализация о фазе кода, обеспечиваемая устройством, не зависит от длины кода. Она непосредственно основана на времени и поэтому может работать независимо от длины кода.
Модуль может быть выполнен так, чтобы обеспечивать передачу сигнала фазы кода в одной или более системах с расширением спектра методом прямой последовательности с множеством длин кода.
Фаза кода может использоваться для синхронизации с прошлой, текущей или будущей принимаемой частью кодовой последовательности, принимаемой от передающего модуля.
Временной сдвиг может использоваться для синхронизации с прошлой, текущей или будущей принимаемой частью кодовой последовательности, принимаемой от передающего модуля.
Модулирующая кодовая последовательность может иметь длину, содержащую заранее заданное число чипов, а модуль может быть выполнен так, чтобы представлять временной сдвиг модулирующего кода путем деления числа чипов от позиции сдвига до опорной позиции на заранее заданное число чипов, соответствующее длине последовательности.
Модулирующая кодовая последовательность может иметь длину, содержащую заранее заданное число чипов, передаваемых с определенной скоростью передачи, а модуль может быть выполнен так, чтобы представлять временной сдвиг модулирующего кода путем деления числа чипов от позиции сдвига до опорной позиции на скорость передачи заранее заданного числа чипов, соответствующего длине последовательности.
Передающий модуль может находиться в том же самом устройстве, что и приемный модуль. Передающий модуль может быть модулем для определения местоположения (РЕ), а приемный модуль может быть измерительным модулем (ME).
Модулирующий код может формироваться так, чтобы он циклически повторялся.
Опорное время может представлять начало циклически повторяющегося модулирующего кода.
Опорная часть может быть началом, серединой или концом кода.
Кодовая последовательность синхронизации может быть псевдослучайной последовательностью.
Кодовая последовательность синхронизации может формироваться в приемном модуле сдвигающим регистром или памятью.
Спектр, расширенный методом прямой последовательности, может быть сигналом множественного доступа с кодовым разделением каналов.
Модуль может входить в состав устройства сети сотовой связи.
Модуль может входить в состав приемника, содержащего приемный модуль.
Модуль может входить в состав приемника, содержащего приемный модуль, а приемник может быть устройством сотовой связи.
Модуль может входить в состав приемника сигналов спутниковой глобальной навигации.
Приемный модуль может быть приемным модулем, удаленным от модуля.
Передающий модуль может быть передающим модулем, удаленным от модуля.
Настоящее изобретение предлагает также устройство сети сотовой связи, содержащее модуль.
Модуль может быть выполнен так, чтобы передавать сигнал фазы кода через радиоинтерфейс сотовой связи в приемный модуль, входящий в состав устройства сотовой связи.
Согласно второму аспекту настоящее изобретение предлагает приемный модуль, выполненный с возможностью приема вспомогательного сигнала фазы кода от модуля сигнализации о фазе кода для содействия вхождению в синхронизм с сигналом с расширенным спектром, сформированным методом прямой последовательности и принимаемым приемным модулем от передающего модуля,
при этом сигнал фазы кода используется приемным модулем для синхронизации фазы кода синхронизации, формируемого приемным модулем, с фазой модулирующего кода сигнала с расширенным спектром, принимаемого приемным модулем, где кодовая последовательность синхронизации соответствует модулирующей кодовой последовательности,
при этом приемный модуль выполнен с возможностью приема сигнала фазы кода, представляющего временной сдвиг кода синхронизации относительно опорного времени, которое соответствует времени передачи определенной опорной части модулирующего кода сигнала с расширенным спектром, а временной сдвиг соответствует времени передачи передаваемой впоследствии сдвинутой части модулирующего кода сигнала с расширенным спектром.
Настоящее изобретение включает также компьютерный код, обеспечивающий предоставление вспомогательного сигнала фазы кода, и компьютерный код для приема вспомогательного сигнала фазы кода.
Настоящее изобретение включает также систему, содержащую модуль согласно первому аспекту изобретения и приемный модуль согласно второму аспекту изобретения.
Настоящее изобретение включает также систему глобальной спутниковой навигации, содержащую модуль согласно первому аспекту изобретения и приемный модуль согласно второму аспекту изобретения.
Настоящее изобретение охватывает один или несколько аспектов и/или форм осуществления в одной или нескольких комбинациях, соответственно изменяемых. Таким образом, функции, конкретно изложенные для одного аспекта или формы осуществления изобретения, могут использоваться также в другом аспекте или форме осуществления изобретения, с выполнением соответствующих изменений, даже если конкретная комбинация не указана специально. Один или несколько признаков описанного выше известного уровня техники могут быть добавлены к одному или нескольким аспектам или формам осуществления настоящего изобретения.
ПЕРЕЧЕНЬ ЧЕРТЕЖЕЙ
Конкретные формы осуществления настоящего изобретения будут описаны со ссылкой на следующие чертежи.
Фиг.1 является иллюстрацией системы передачи с расширением спектра прямой последовательностью согласно известному уровню техники, но применительно к настоящему изобретению.
Фиг.2 иллюстрирует расширение спектра псевдослучайным шумом согласно известному уровню техники, но применительно к настоящему изобретению.
Фиг.3 является схематической иллюстрацией помощи сети в конкретной форме осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ КОНКРЕТНЫХ ФОРМ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Рассмотрим множество спутниковых навигационных передатчиков 1, 2, 3, 4 и т.д., каждый из которых непрерывно модулирует свой сигнал передачи соответствующей уникальной псевдослучайной последовательностью (псевдослучайным кодом) Р1, Р2, Р3, Р4… и т.д., чтобы обеспечить передачу сигналов с кодовым разделением каналов. Каждый спутник начинает передачу своего сигнала в начальный момент времени, допустим, в понедельник в 12.00 по Гринвичу. Начало передачи сигналов соответствует началу модулирующей последовательности. Таким образом, время 12:00 по Гринвичу соответствует началу каждой из кодовых последовательностей Р1, Р2, Р3 и Р4. Спутники 1 и 4 связаны с глобальной навигационной спутниковой системой GPS, а спутники 2 и 3 связаны с глобальной навигационной спутниковой системой Galileo. В данном примере начало модулирующей последовательности для этих двух систем одинаково, то есть понедельник 12.00 по Гринвичу. Однако модулирующие последовательности для этих двух систем могут начинаться и в разное время.
Некоторые из кодов имеют длину последовательности, отличную от других. Так, например, Р1 имеет длину 1023 чипа, Р2 - 4095 чипов (больше чем Р1), Р3 - 511 чипов (меньше чем Р1) и Р4 - 1023 чипа. Каждый спутник продолжает модуляцию с начала последовательности, как только доходит до конца последовательности. В случае Р1 и Р4 это происходит через каждую 1 мс. В случае Р2 или Р3 это может быть любой величиной, например 2 мс, 4 мс или 1 мс. Для простоты предположим, что в данном случае эта величина составляет 1 мс.
Приемник 100, находящийся на Земле, содержит устройство 200 сотовой связи (системы GSM), радиочастотный (RF) модуль 101 системы глобальной спутниковой навигации (GNSS), модуль 120 измерений (ME) системы GNSS и модуль 110 определения местоположения (РЕ) системы GNSS. Радиочастотный модуль 101 системы GNSS служит для приема сигналов GNSS с кодовым разделением каналов от спутниковых навигационных передатчиков 1,2, 3,4 … и т.д. Эти сигналы подаются в модуль ME 120. Модуль РЕ 110 и модуль ME 120 могут быть размещены в одном блоке обработки основной полосы частот (ВВ) (как показано на фиг.3) или в различных блоках.
Модуль ME 120 построен так, чтобы выполнять измерения с помощью сигналов системы GNSS и преобразовывать их результаты в подходящий формат для вычисления информации о местоположении в модуле РЕ 110. Аппаратные (HW) средства модуля ME 120 включают аппаратный модуль ВВ и входной радиочастотный аппаратный модуль системы GNSS (обычные аппаратные средства приемника системы GNSS), память для отсчетов сигналов GNSS и процессор для обработки отсчитываемых и запоминаемых сигналов GNSS или комбинацию вышеупомянутых средств.
Модуль ME 120 имеет необходимые программные (SW) средства нижнего уровня и логику для вхождения в синхронизм с сигналом, слежения, проверки правильности и приема данных. Модуль ME 120 имеет также необходимые программные средства нижнего уровня для того, чтобы управлять аппаратными средствами GNSS согласно параметрам конфигурации, поступающим из модуля РЕ 110 (экономии энергии, калибровка частоты, калибровка времени, настройка автоматической регулировки усиления, интервала измерения и т.д.). Модуль ME 120 может измерять сигналы от спутников систем GPS, ГЛОНАСС и Galileo или некоторой их комбинации, или других систем GNSS, не упомянутых здесь специально. Термин "нижнего уровня" имеет отношение к любому аспекту, который касается вхождения в синхронизм и слежения за спутниковыми сигналами в режиме реального времени посредством измерительного компонента.
Модуль РЕ 110 выполняет вычисление информации о местоположении (позиция, скорость, время). Модуль РЕ 110 формирует информацию нижнего уровня для модуля ME 120, чтобы синхронизироваться с сигналами GPS, ГЛОНАСС и/или Galileo, то есть ожидаемые фазы кода сигналов, ожидаемую доплеровскую частоту, погрешности кода и доплеровского сдвига, подробности об опорной частоте, подробности о начальном времени. Модуль РЕ 110 формирует сигналы управления нижнего уровня для модуля ME 120, чтобы сделать возможной экономию энергии, выключение и включение питания, самопроверку и т.д. Модуль РЕ 110 преобразует информацию помощи для GNSS, поступающую от сотовых сетей связи или от других источников (от беспроводной локальной сети (WLAN), из памяти), в формат, подходящий для модуля ME 120. Другими словами, модуль РЕ устраняет зависимости от протоколов передачи вспомогательных данных (например, специфические особенности сотовой сети связи, подобные передаче времени) и преобразует вспомогательные данные в "формат GNSS".
Модуль РЕ 110 генерирует необходимые ответные сообщения согласно поддерживаемому протоколу. Модуль РЕ 110 может использовать также отличные от GNSS измерения для вычисления информации о местоположении.
Приемник 100 принимает спутниковые сигналы CDMA по радиоинтерфейсу. Он также принимает помощь от сотовой сети 300 связи, например по радиоинтерфейсу, посредством сигналов GSM. Приемник 100 имеет две антенны и соответствующие аппаратные/программные средства 101, 200, одни для приема сигналов CDMA посредством радиочастотного модуля 101 системы GNSS и одни (200) для приема сигнализации от GSM (фиг.3). Однако может использоваться также и одна приемопередающая антенна.
Чтобы определить свое местоположение на Земле, приемник 100 сначала должен войти в синхронизм с сигналами спутников 1, 2, 3 и 4. Помощь в синхронизации обеспечивается сетью 300.
Приемник 100 знает, что должны быть "видны" спутники 1-4. Эта информация была введена в память приемника (не показана), например, в последний раз, когда приемник 100 был во включенном состоянии. Также в память записываются псевдослучайные коды (например, Р1-Р4), которые используются соответствующими спутниками для модуляции передаваемых ими сигналов. Эти коды используются как коды синхронизации для принимаемых сигналов. Высокая корреляция между кодом синхронизации и принимаемым сигналом показывает, что фазы кодов совпадают.
Приемник 100 идентифицирует код Р1 из памяти, чтобы начать процесс синхронизации фазы со спутником 1. Исходная позиция в кодовой последовательности Р1 определяется из данных синхронизации, предоставляемых сетью 300 сотовой связи.
Настоящее изобретение может использоваться в двух разных интерфейсах: между сетью 300 и приемником 100, а также в приемнике 100 между модулем ME 120 и модулем РЕ 110. Рассмотрим сначала первый интерфейс.
Устройство внутри сети 300 измеряет сигналы GNSS, чтобы предоставить информацию о фазе кода. (В других формах осуществления изобретения это устройство не обязательно должно измерять сигналы, а может фактически вычислять их, используя широко известные методы.) Эти сигналы системы GNSS (например, GPS и/или Galileo) являются по сути значениями (и погрешностями) фаз кода, которые затем преобразуются в секунды по существу делением значения фазы кода на значение длины кода конкретной системы. Так, в случае, когда значение длины фазы кода равно 1023 чипа/мс (Р1), фаза кода представляется делением значения фазы кода на 1023 чипа/мс. В случае, когда длина кода равна 4095 чипов/мс (Р2), фаза кода представляется делением значения фазы кода на 4095 чипов/мс.
Это значение фазы кода можно рассматривать как значение, выраженное в секундах и представляющее текущую фазу по отношению к опорному времени, которое означает определенную конкретную позицию в кодовой последовательности, например начало/середину/конец кодовой последовательности. В случае, когда опорное время представляет начало кодовой последовательности, значение фазы кода в секундах может представлять время, прошедшее после опорного времени, при этом опорное время соответствует началу передачи сигналов передатчиками GNSS (то есть сдвиг относительно 12.00 понедельника по Гринвичу). Однако значение фазы кода может представлять время, прошедшее с начала конкретной кодовой последовательности, которая смещена от начала передачи сигналов, например временной сдвиг от начала 3000-го повторения кодовой последовательности. В последнем случае для представления значения в секундах потребуется меньше битов, поскольку сдвиг времени будет сравнительно малым по сравнению с ранее упомянутым примером.
Опорное время должно быть известно приемнику 100. Оно может предоставляться и обновляться через сеть или систему GNSS.
Это значение фазы кода в секундах и идентифицирующая информация системы (короткое постоянное значение, которое сообщает, принадлежит ли сигнал системе GPS, Galileo или какой-либо иной) затем передаются на некоторой несущей приемнику 100. Приемник 100 затем использует эту информацию вместе с опорным временем при вхождении в синхронизм со спутниковыми сигналами.
Рассмотрим пример, когда опорное время установлено на понедельник 12.00 по Гринвичу, так что значения фазы кода представляют временной сдвиг относительно 12.00 понедельника по Гринвичу. Предположим, что текущая позиция кода - 500 чипов относительно 12.00 понедельника по Гринвичу для кодовой последовательности Р1 и 700 чипов относительно 12.00 понедельника по Гринвичу для кодовой последовательности Р2. Фаза кода, предоставляемая сетью приемнику 100, равняется 500/1023 мс для кодовой последовательности Р1 и 700/4095 мс для кодовой последовательности Р2.
В случае кодовой последовательности Р1, приемник 100 принимает фазу кода 500/1023 мс. Из идентифицирующей информации системы приемник знает, что эта фаза кода предназначена для сигналов GPS. Учитывая, что приемник 100 знает позицию кода, которая соответствует опорному времени, и теперь он знает, что фаза кода равна 500/1023, он может определить хорошее приближение для фазы кода, которое должно использоваться, чтобы начать процесс корреляции для Р1.
То же самое выполняется для кодовой последовательности Р2. Приемник 100 принимает фазу кода 700/4095 мс. Из идентифицирующей информации системы приемник знает, что эта фаза кода предназначена для сигналов Galileo. Учитывая, что приемник 100 знает позицию кода, которая соответствует опорному времени, и теперь он знает, что фаза кода - 700/4095, он может определить хорошее приближение для фазы кода, которое должно использоваться, чтобы начать процесс корреляции для Р2.
Конечно, имеется также потребность передавать "базовое время", в течение которого рассмотренная помощь в синхронизации действительна. За пределами этого базового времени для синхронизации потребуются новые данные помощи.
Второй интерфейс работает точно таким же образом, но в этом случае модуль РЕ 110 вычисляет указанное "значение в секундах" или из данных содействия синхронизации, принимаемых от сети, или из информации об орбите спутника. Это "значение в секундах", идентифицирующая информация системы сигналов, величины погрешности (в секундах) и базовое время затем передаются по некоторому каналу (это может быть, например, последовательный порт) в модуль ME 120, который является в сущности цифровым процессором сигналов, управляющим реальной аппаратурой и затем использующим эту информацию при поиске спутников.
Опорное время для этого случая также необходимо передавать со "значением в секундах". В этом случае опорное время может быть, например, представлено в некоторой форме локального времени между ME 120 и РЕ 110. Локальное время может быть, например, некоторым значением счетчика из блока основной полосы частот, или оно может быть любым обычным опорным временем.
В общем, приемник 100 непрерывно принимает сигналы со спутников. Фаза кода может использоваться для синхронизации с прошлой, текущей или будущей принимаемой частью кодовой последовательности, принимаемой со спутников 1, 2, 3, 4 и т.д. Приемник 100 выполнен с возможностью обеспечения соответствующими сведениями (по одному из радиоинтерфейсов или предварительно сохраненными сведениями) для определения, должна ли синхронизация осуществляться с прошлой, текущей или будущей принимаемой частью кодовой последовательности.
Когда приемник ищет первый спутник, он должен прибавить свои собственные погрешности (погрешность опорного времени, погрешность опорной частоты и т.д.) к погрешности, указанной в данных содействия синхронизации. Как только первый спутник, например 1, синхронизирован, второй спутник, например 2, можно искать с меньшей неопределенностью, так как теперь приемник способен уменьшить свои собственные погрешности, основываясь на синхронизированном сигнале.
Способы коррекции доплеровского сдвига, выполняемые при вхождении в синхронизм с принимаемым сигналом, специально не рассматривались, но могут выполняться. Кроме того, хотя при описании предоставления помощи от сети конкретно упомянута сеть GSM, помощь сети может обеспечиваться посредством системы передачи WLAN или любой другой подходящей системы передачи.

Изобретение относится к системам передач с расширенным спектром, в частности с расширением спектра методом прямой последовательности, который используется в системах передачи с кодовым разделением каналов (CDMA) и может быть использован в спутниковых навигационных системах. Технический результат - уменьшение времени вхождения в синхронизм. Для этого модуль сигнализации о фазе кода формирует сигнал фазы кода для помощи в приеме сигнала с расширенным спектром, принимаемого приемным модулем от передающего модуля, при этом сигнал фазы кода используется приемным модулем для синхронизации фазы кода синхронизации, формируемого в приемном модуле, с фазой модулирующего кода указанного сигнала с расширенным спектром, принимаемого приемным модулем, где кодовая последовательность синхронизации соответствует модулирующей кодовой последовательности. Модуль сигнализации о фазе кода обеспечивает формирование сигнала, представляющего временной сдвиг кода синхронизации относительно опорного времени, которое связано с временем передачи определенной опорной части модулирующего кода, а временной сдвиг связан с временем передачи передаваемой впоследствии сдвинутой части модулирующего кода. 7 н. и 20 з.п. ф-лы, 3 ил.
1. Модуль для предоставления сигнализации о фазе кода, содержащий:
выход для предоставления сигнала фазы кода для содействия вхождению в синхронизм с сигналом с расширенным спектром, сформированным методом прямой последовательности и принимаемым модулем для приема сигнала от модуля для передачи сигнала,
при этом сигнал фазы кода предназначен для использования модулем для приема сигнала для синхронизации фазы кода синхронизации, формируемого в модуле для приема сигнала, с фазой модулирующего кода указанного сигнала с расширенным спектром, принимаемого модулем для приема сигнала, где последовательность кода синхронизации соответствует последовательности модулирующего кода, и
средство предоставления временного сдвига для подачи на выход сигнала фазы кода, представляющего временной сдвиг кода синхронизации относительно опорного времени, которое соответствует времени передачи определенной опорной части модулирующего кода указанного сигнала с расширенным спектром, при этом временной сдвиг соответствует времени передачи передаваемой впоследствии сдвинутой части модулирующего кода указанного сигнала с расширенным спектром.
2. Модуль по п.1, который предназначен для сигнализации о фазе кода для множества длин кода и выполнен так, чтобы предоставлять сигнал фазы кода в одной или более системах с расширением спектра методом прямой последовательности с множеством длин кода.
3. Модуль по п.1, в котором фаза кода используется для синхронизации с прошлой, текущей или будущей принимаемой частью кодовой последовательности, принимаемой от модуля для передачи сигнала.
4. Модуль по п.1, в котором временной сдвиг используется для синхронизации с прошлой, текущей или будущей принимаемой частью кодовой последовательности, принимаемой от модуля для передачи сигнала.
5. Модуль по п.1, в котором последовательность модулирующего кода имеет длину, содержащую заранее заданное число чипов, при этом указанный модуль для предоставления сигнализации выполнен так, чтобы представлять временной сдвиг модулирующего кода путем деления числа чипов от позиции сдвига до опорной позиции на заранее заданное число чипов, соответствующее длине последовательности.
6. Модуль по п.1, в котором последовательность модулирующего кода имеет длину, содержащую заранее заданное число чипов, передаваемых с определенной скоростью передачи, при этом указанный модуль для предоставления сигнализации выполнен так, чтобы представлять временной сдвиг модулирующего кода путем деления числа чипов от позиции сдвига до опорной позиции на скорость передачи заранее заданного числа чипов, соответствующего длине последовательности.
7. Модуль по п.1, в котором модуль для передачи сигнала находится в том же самом устройстве, что и модуль для приема сигнала.
8. Модуль по п.1, в котором модуль для передачи сигнала является модулем для определения местоположения (РЕ), а модуль приема сигнала является измерительным модулем (ME).
9. Модуль по п.1, в котором модулирующий код циклически повторяется.
10. Модуль по п.1, в котором опорное время представляет начало циклически повторяющегося модулирующего кода.
11. Модуль по п.1, в котором опорная часть является началом, серединой или концом кода.
12. Модуль по п.1, в котором последовательность кода синхронизации является псевдослучайной кодовой последовательностью.
13. Модуль по п.1, в котором последовательность кода синхронизации формируется в модуле для приема сигнала сдвигающим регистром или памятью.
14. Модуль по п.1, в котором спектр, расширенный методом прямой последовательности, является сигналом множественного доступа с кодовым разделением каналов.
15. Модуль по п.1, который входит в состав устройства сети сотовой связи.
16. Модуль по п.1, который входит в состав приемника, содержащего модуль для приема сигнала.
17. Модуль по п.1, который входит в состав приемника, содержащего модуль для приема сигнала, при этом приемник является устройством сотовой связи.
18. Модуль по п.1, где модуль для приема сигнала входит в состав приемника сигналов спутниковой глобальной навигации.
19. Модуль по п.1, где модуль для приема сигнала является приемником, удаленным от модуля для предоставления сигнализации.
20. Модуль по п.1, где модуль для передачи сигнала является передатчиком, удаленным от указанного модуля для предоставления сигнализации.
21. Модуль по п.1, который выполнен с возможностью передачи сигнала фазы кода через радиоинтерфейс сотовой связи в модуль для приема сигнала, входящий в состав устройства сотовой связи.
22. Устройство сети сотовой связи, содержащее модуль по п.1.
23. Модуль для приема сигнала, имеющий
вход для приема сигнала фазы кода от модуля для предоставления сигнализации о фазе кода для содействия вхождению в синхронизм с сигналом с расширенным спектром, сформированным методом прямой последовательности и принимаемым указанным модулем для приема сигнала от модуля для передачи сигнала,
при этом сигнал фазы кода представляет временной сдвиг кода синхронизации относительно опорного времени, которое соответствует времени передачи определенной опорной части модулирующего кода указанного сигнала с расширенным спектром, причем временной сдвиг соответствует времени передачи передаваемой впоследствии части модулирующего кода указанного сигнала с расширенным спектром, где последовательность кода синхронизации соответствует последовательности модулирующего кода, и
средство синхронизации для использования сигнала фазы кода для синхронизации фазы кода синхронизации, формируемого модулем для приема сигнала, с фазой модулирующего кода указанного сигнала с расширенным спектром, принимаемого модулем для приема сигнала, для содействия вхождению в синхронизм с сигналом с расширенным спектром, принимаемым модулем для приема сигнала.
24. Система глобальной навигации, содержащая модуль по п.1 и модуль для приема сигнала, выполненный с возможностью приема вспомогательного сигнала фазы кода от модуля для предоставления сигнализации о фазе кода для содействия вхождению в синхронизм с сигналом с расширенным спектром, сформированным методом прямой последовательности и принимаемым указанным модулем для приема сигнала от модуля для передачи сигнала,
при этом сигнал фазы кода используется модулем для приема сигнала для синхронизации фазы кода синхронизации, формируемого модулем для приема сигнала, с фазой модулирующего кода указанного сигнала с расширенным спектром, принимаемого модулем для приема сигнала, где последовательность кода синхронизации соответствует последовательности модулирующего кода,
при этом модуль для приема сигнала выполнен с возможностью приема сигнала фазы кода, представляющего временной сдвиг кода синхронизации относительно опорного времени, которое соответствует времени передачи определенной опорной части модулирующего кода указанного сигнала с расширенным спектром, а временной сдвиг соответствует времени передачи передаваемой впоследствии сдвинутой части модулирующего кода указанного сигнала с расширенным спектром.
25. Система глобальной навигации, содержащая модуль по любому из пп.1-23.
26. Способ предоставления сигнализации о фазе кода, содержащий:
предоставление сигнала фазы кода для содействия вхождению в синхронизм с сигналом с расширенным спектром, сформированным методом прямой последовательности и принимаемым модулем для приема сигнала от модуля для передачи сигнала, при этом сигнал фазы кода предназначен для использования модулем для приема сигнала для синхронизации фазы кода синхронизации, формируемого в модуле для приема сигнала, с фазой модулирующего кода указанного сигнала с расширенным спектром, принимаемого модулем для приема сигнала, где последовательность кода синхронизации соответствует последовательности модулирующего кода, и
предоставление сигнала фазы кода, представляющего временной сдвиг кода синхронизации относительно опорного времени, которое соответствует времени передачи определенной опорной части модулирующего кода указанного сигнала с расширенным спектром, при этом временной сдвиг соответствует времени передачи передаваемой впоследствии сдвинутой части модулирующего кода указанного сигнала с расширенным спектром.
27. Способ приема сигнала фазы кода, содержащий
прием сигнала фазы кода для содействия вхождению в синхронизм с сигналом с расширенным спектром, сформированным методом прямой последовательности и принимаемым модулем для приема сигнала от модуля для передачи сигнала, при этом сигнал фазы кода представляет временной сдвиг кода синхронизации относительно опорного времени, которое соответствует времени передачи определенной опорной части модулирующего кода указанного сигнала с расширенным спектром, а временной сдвиг соответствует времени передачи передаваемой впоследствии части модулирующего кода указанного сигнала с расширенным спектром, где последовательность кода синхронизации соответствует последовательности модулирующего кода, и
синхронизацию фазы кода синхронизации, формируемого модулем для приема сигнала, с фазой модулирующего кода указанного сигнала с расширенным спектром, принимаемого модулем для приема сигнала, для содействия вхождению в синхронизм с сигналом с расширенным спектром, принимаемым модулем для приема сигнала.
| US 6300899 B1, 09.10.2001 | |||
| СПОСОБ И УСТРОЙСТВО ВЫСОКОСКОРОСТНОЙ ПЕРЕДАЧИ ПАКЕТНЫХ ДАННЫХ | 1998 |
|
RU2233045C2 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ОБХОДА ДЛЯ ВОЛОКОННО-ОПТИЧЕСКИХ СЕТЕЙ СВЯЗИ | 1999 |
|
RU2153228C1 |
| US 5825887 B1, 13.08.2002 | |||
| US 6433739 B1, 13.08.2002 | |||
| US 6201499 B1, 13.03.2001 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ МАРКИРОВАНИЯ И УПРАВЛЕНИЯ ВНУТРИТРУБНЫМИ ОБЪЕКТАМИ | 2002 |
|
RU2215932C1 |

