Изобретение относится к радиосвязи.
Определение местоположения стало значительно более простым и более точным, начиная с развития спутниковых систем определения местоположения. Один из примеров спутниковой системы определения местоположения - глобальная система определения местоположения (GPS) NAVSTAR (которая описана в документе Global Positioning System Standard Positioning Service Signal Specification, 2-е издание, 2 июня 1995 г., Центр передвижения береговой охраны Соединенных Штатов, Александрия, VA). Другой пример существующей системы - GPS GLONASS, поддерживаемая Россией. Спутниковые системы определения местоположения, находящиеся в стадии планирования, включают в себя европейское предложение GALILEO. Приемники GPS в настоящее время доступны для использования в самолетах, судах и наземных транспортных средствах и для ношения с собой отдельными людьми.
GPS NAVSTAR обеспечивает тридцать два спутника, или «космические транспортные средства» (КТС, SV) (двадцать четыре в настоящее время активны), которые вращаются по орбите вокруг Земли в шести орбитальных плоскостях (четыре спутника в каждой плоскости). Орбиты КТС повторяют почти тот же самый путь на поверхности земли, хотя Земля вращается под ними каждый день. Орбитальные плоскости одинаково расположены и наклонены относительно экваториальной плоскости, таким образом гарантируя, что путь в пределах прямой видимости существует по меньшей мере к пяти КТС из любой (не заслоненной) точки на земле.
Каждое КТС несет на себе очень точные атомные часы, которые синхронизированы с общей временной базой. Наземные станции слежения измеряют сигналы от КТС и внедряют результаты этих измерений в орбитальные модели для каждого спутника. Навигационные данные и данные корректировки часов КТС вычисляют для каждого спутника из этих моделей и загружают к каждому КТС. КТС затем передает навигационное сообщение, которое включает в себя информацию, относящуюся к его местоположению.
Каждое КТС передает свое навигационное сообщение со скоростью передачи данных 50 бит в секунду через сигнал с расширением спектра прямой последовательностью (DSSS), который модулируется с помощью двоичной фазовой манипуляции (ДФМн, BPSK) на несущую на 1,57542 ГГц (также называемую частотой L1). Для расширения спектра сигнала, каждое КТС использует отличающуюся одну из тридцати двух псевдослучайных шумовых (ПСШ, PRN) последовательностей (также называемых кодами грубого обнаружения, или кодами C/A), которые имеют частоту следования элементарных сигналов 1,023 МГц и длину 1023 элементарных сигналов. Коды расширения выравнивают с общей временной базой и повторяют каждую миллисекунду.
Приемник GPS вычисляет свое расположение, объединяя данные из навигационного сообщения (эти данные указывают расположение КТС) с задержкой сигнала, принятого от КТС (которая указывает местоположение приемника относительно КТС). Из-за смещений во временной базе приемника относительно временной базы GPS сигналы по меньшей мере от четырех КТС обычно необходимы для определения местоположения в трех измерениях, хотя сигналы от дополнительных КТС (если доступны) могут использоваться для обеспечения лучшей точности.
Проблемы с обнаружением сигнала GPS могут произойти, когда приемник GPS не может принять сигнал прямой видимости от достаточного количества КТС. В затрудненных средах (например, в закрытом помещении или под землей), таким образом, может быть трудно или невозможно для приемника GPS сделать точное определение местоположения.
Псевдоспутник - наземный передатчик, который принимает один или более сигналов GPS и генерирует и передает C/A волны на частоте несущей GPS L1. В системе GPS NAVSTAR, ПСШ последовательности 33 - 37 не назначены спутникам и могут использоваться псевдоспутниками для генерации и передачи C/A волн. Если синхронизация и местоположение псевдоспутников известны с высокой точностью, то переданная C/A волна может использоваться для определения местоположения.
Псевдоспутники могут использоваться для увеличения зоны GPS. К сожалению, псевдоспутники требуют присутствия сигнала прямой видимости от одного или более спутников GPS и используются только там, где доступен сигнал GPS.
Способ радиосвязи согласно одному из вариантов осуществления изобретения включает в себя получение первой временной базы из сигнала, принятого от передатчика на земле. Например, получение первой временной базы может включать в себя получение временного сдвига кода принятого сигнала и/или декодирование информационного сообщения времени из принятого сигнала. Получение первой временной базы может также включать в себя синхронизацию гетеродина или корректировку счетчика или генератора кода. В одном примере первую временную базу получают из сигнала, принятого от базовой станции сети для сотовой телефонной связи (например, от базовой станции множественного доступа с кодовым разделением каналов (CDMA)).
Такой способ также включает в себя применение предопределенного смещения к первой временной базе для получения второй временной базы. Предопределенное смещение основано на задержке распространения принятого сигнала. Предопределенное смещение может также быть основано на задержках обработки сигналов и/или других задержках передачи сигналов. Получение второй временной базы может включать в себя синхронизацию гетеродина или корректировку счетчика или генератора кода.
Такой способ также включает в себя генерацию синхронизирующего сигнала, который основан на временном сдвиге кода второй временной базы. Например, временной сдвиг кода синхронизирующего сигнала может выравниваться с временной базой спутниковой системы определения местоположения (например, GPS NAVSTAR).
Фиг.1 показывает последовательность операций способа M100 согласно варианту осуществления изобретения.
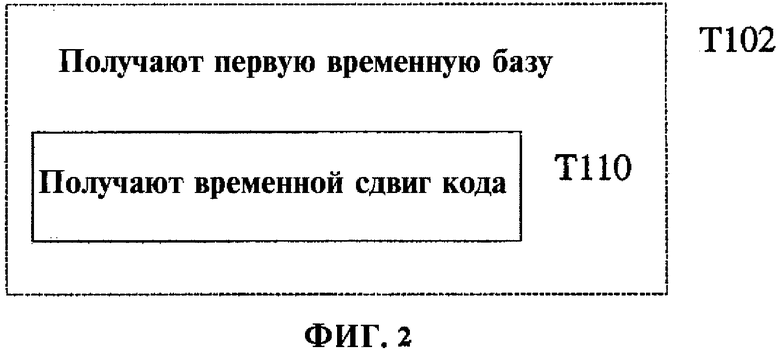
Фиг.2 показывает воплощение T102 программного модуля T100.
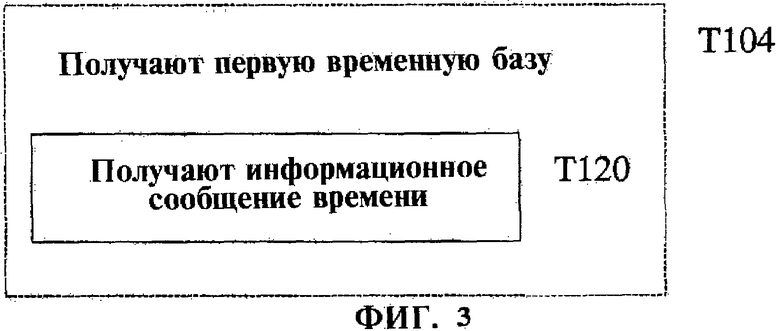
Фиг.3 показывает воплощение T104 программного модуля T100.
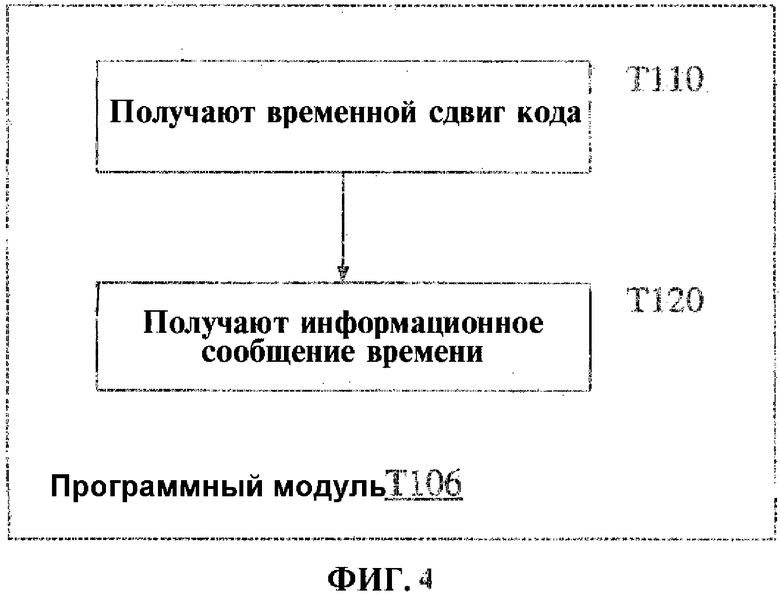
Фиг.4 показывает воплощение T106 программного модуля T100.
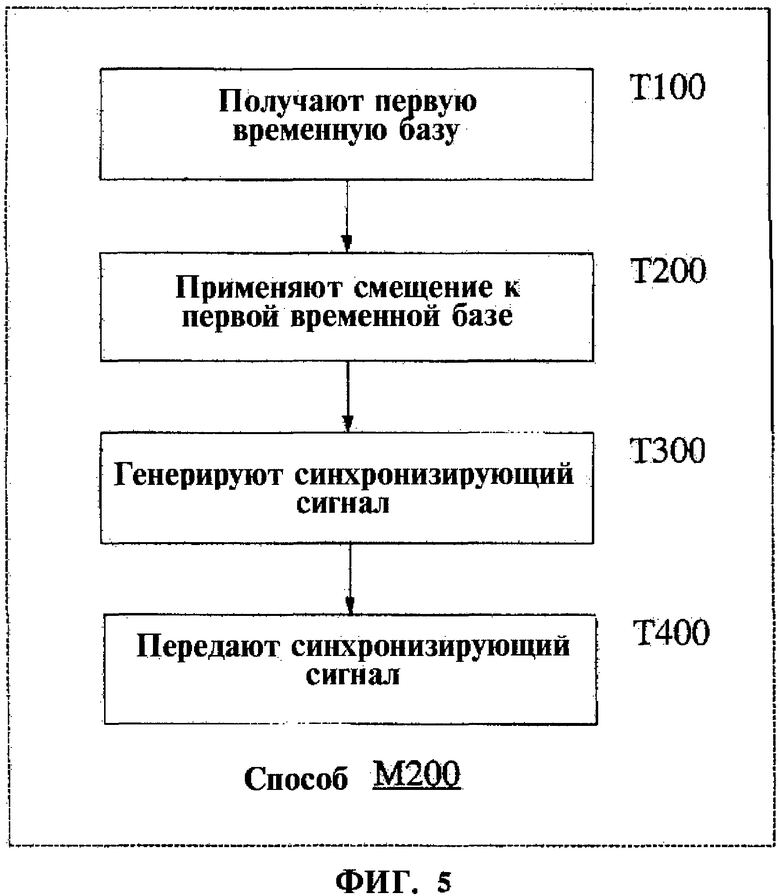
Фиг.5 показывает последовательность операций воплощения M200 способа M100.
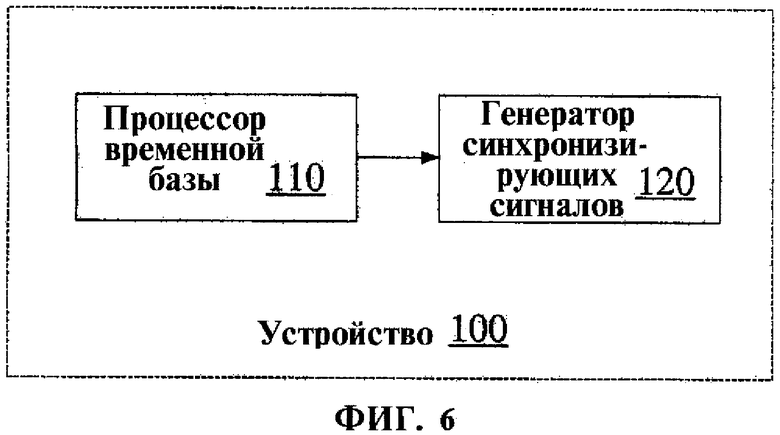
Фиг.6 - структурная схема устройства 100 согласно варианту осуществления изобретения.
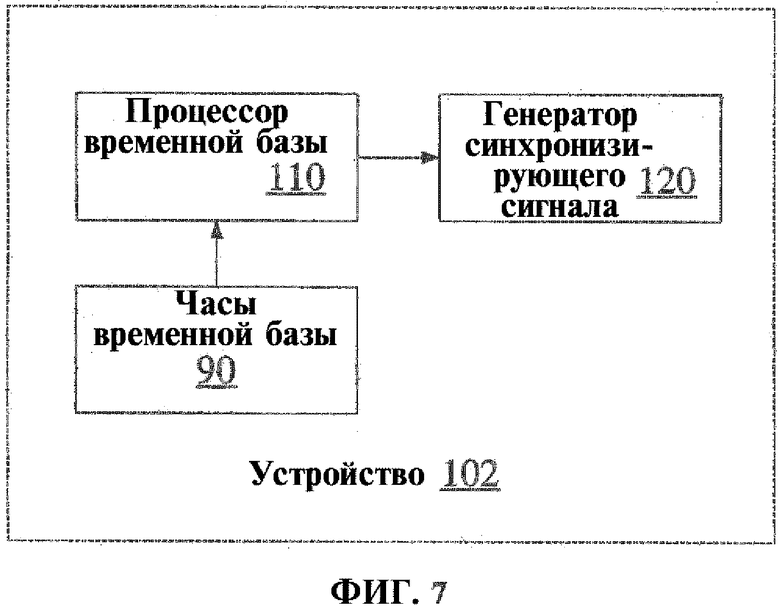
Фиг.7 - структурная схема воплощения 102 устройства 100.
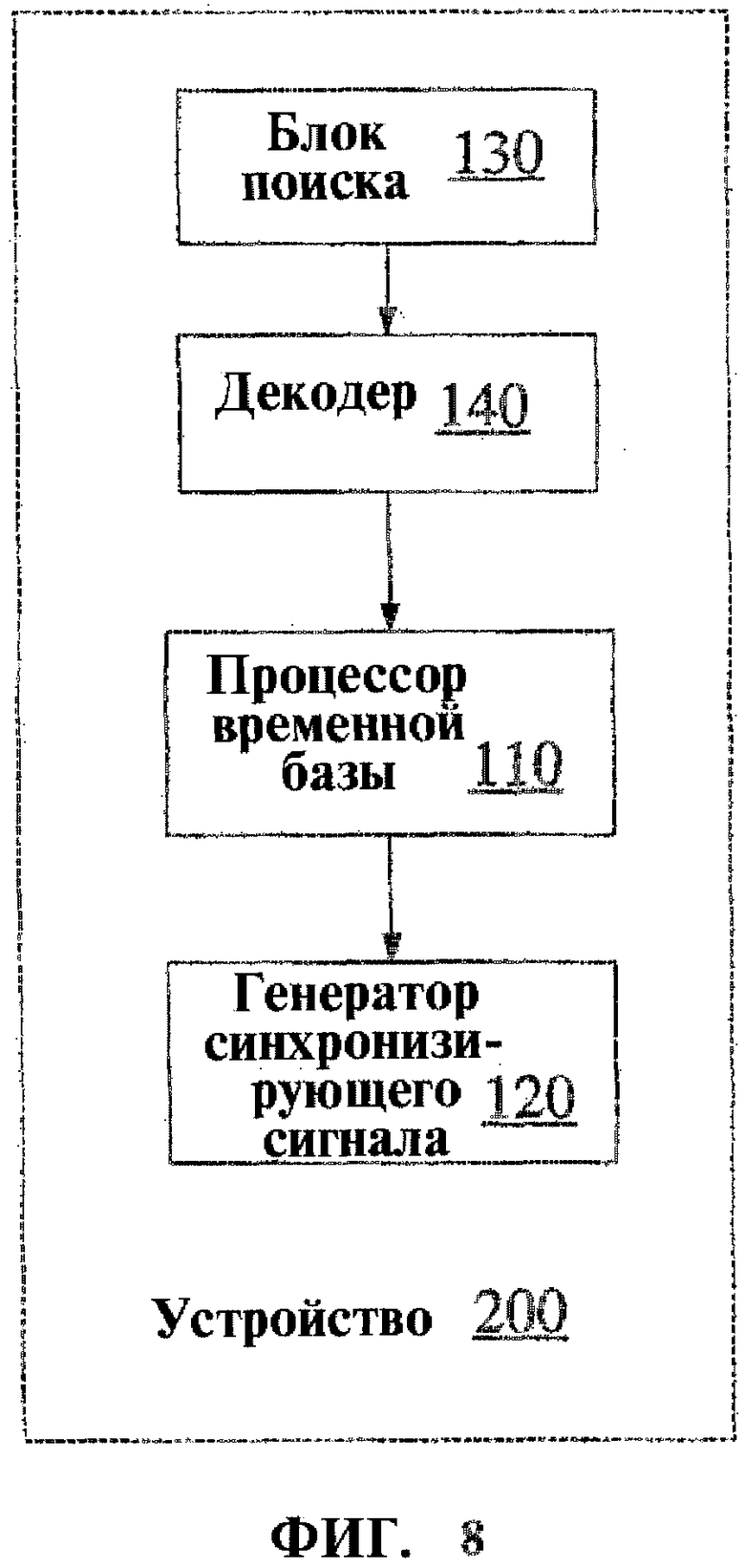
Фиг.8 - структурная схема воплощения 200 устройства 100.
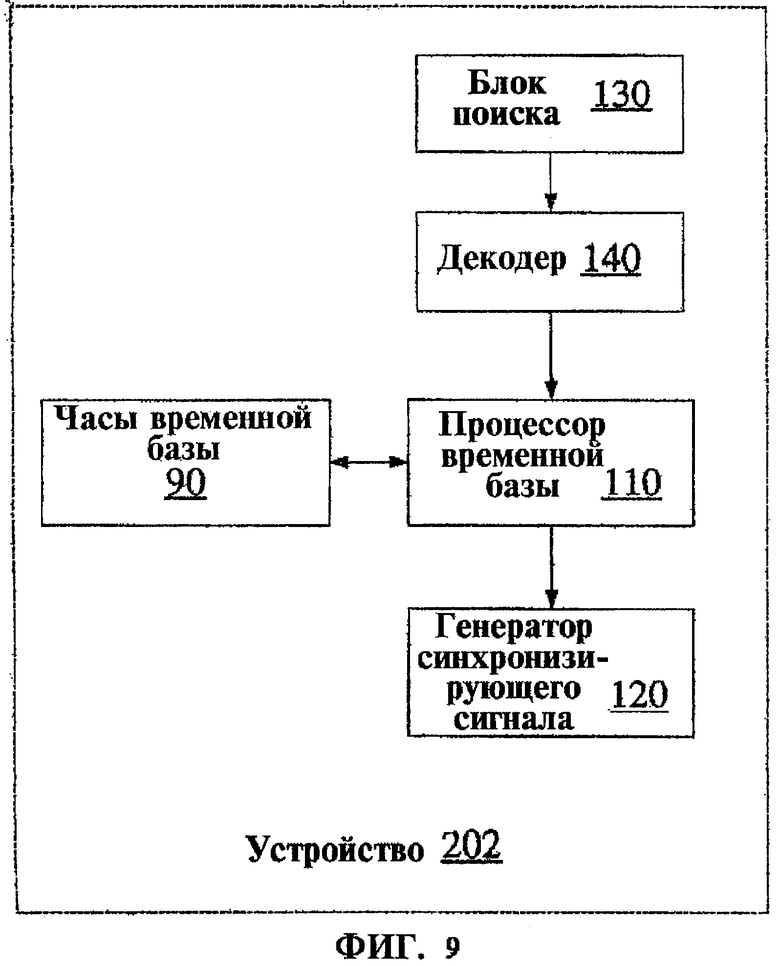
Фиг.9 - структурная схема воплощения 202 устройства 200.
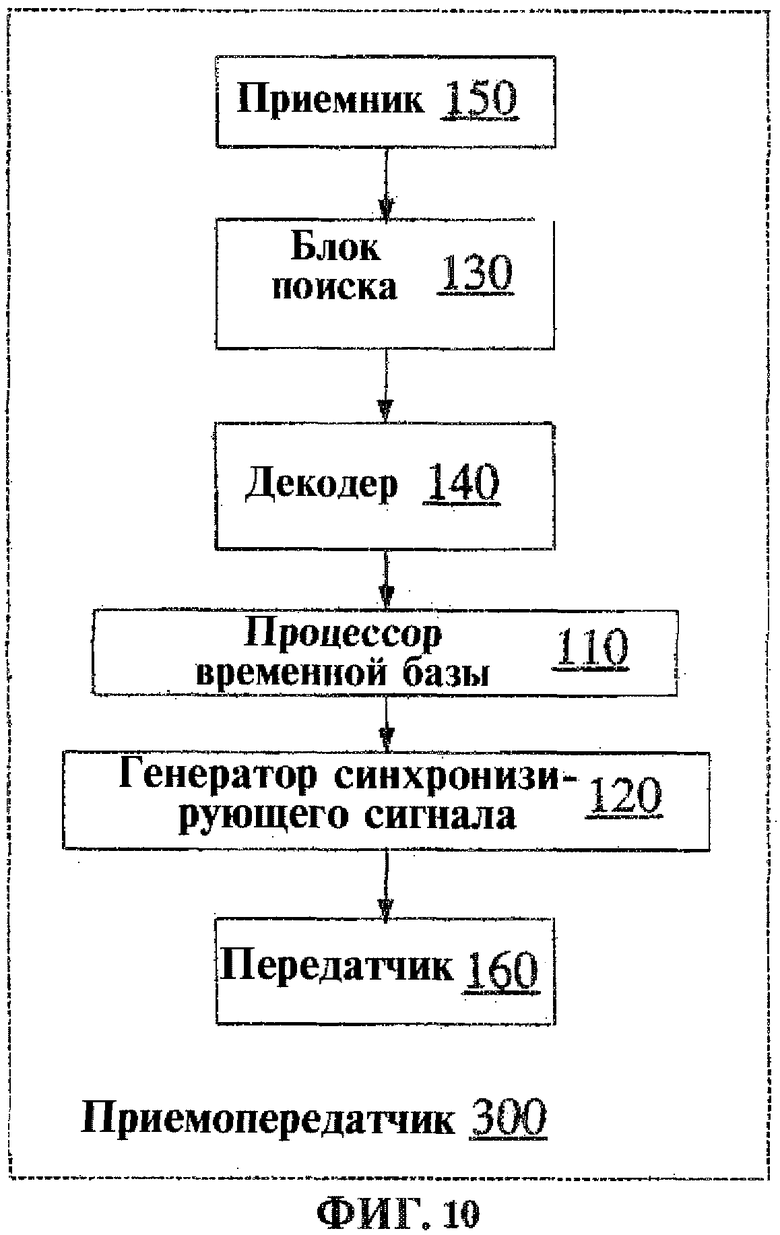
Фиг.10 - структурная схема воплощения 300 устройства 100.
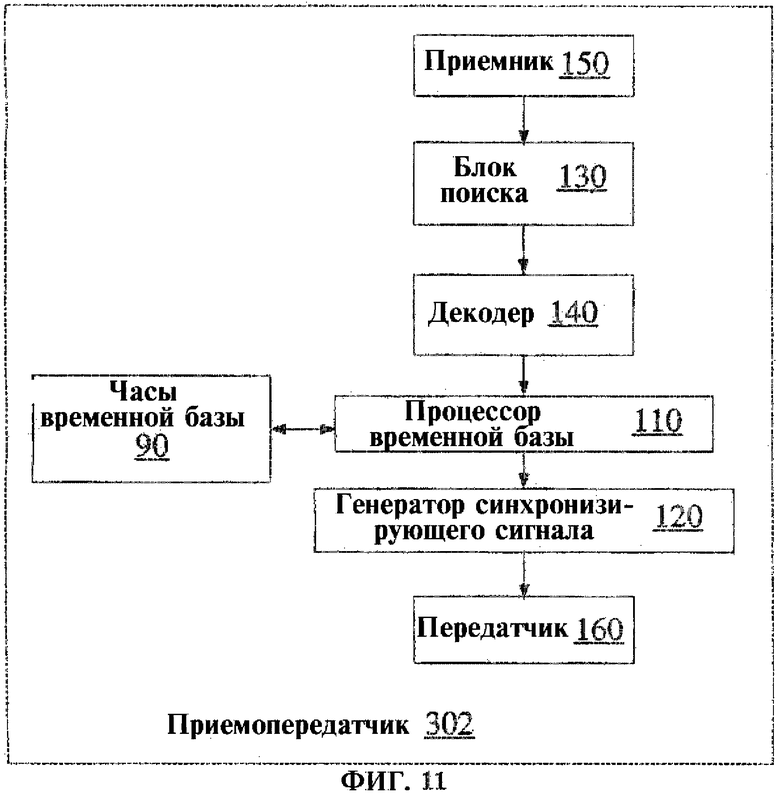
Фиг.11 - структурная схема воплощения 302 устройства 300.
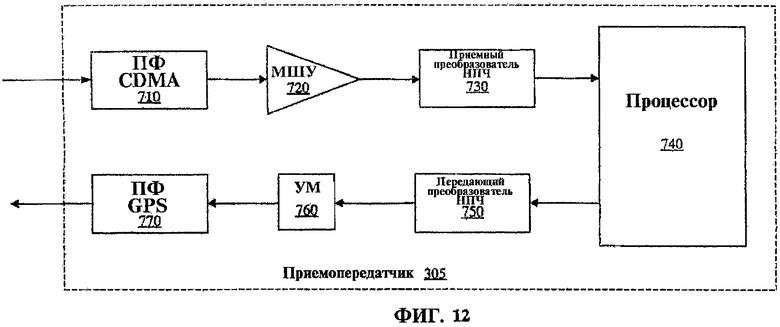
Фиг.12 - структурная схема воплощения 305 устройства 300.
Фиг.1 показывает последовательность операций для способа M100 согласно варианту осуществления изобретения. Программный модуль T100 получает первую временную базу из сигнала, принятого от передатчика на земле («принятый сигнал»). Программный модуль T200 применяет предопределенное смещение к первой временной базе для получения второй временной базы. Предопределенное смещение основано на задержке распространения принятого сигнала. Программный модуль T300 генерирует синхронизирующий сигнал, временной сдвиг кода для которого основан на второй временной базе.
Принятый сигнал может модулироваться согласно схеме амплитудной модуляции (AM), такой как амплитудная манипуляция (АМн, OOK); схеме частотной манипуляции (ЧМн, FSK); схеме фазовой манипуляции (ФМн, PSK), такой как двоичная фазовая манипуляция (ДФМн, BPSK), квадратурная фазовая манипуляция (КФМн, QPSK), восьмеричная фазовая манипуляция (ВФМн, 8-PSK) или квадратурная фазовая манипуляция со сдвигом (КФМнС, OQPSK); схеме манипуляции с минимальным сдвигом (МнМС, MSK), такой как Гауссова манипуляция с минимальным сдвигом (Гауссова MSK); или смешанной схеме, такой как квадратурная амплитудная модуляция (КВАМ, QAM). В некоторых применениях программный модуль T100 получает первую временную базу из источника на земле, который поддерживает более точную временную базу, чем та, которая доступна в точке приема (или который имеет лучший доступ к ней).
В примерном применении способа M100 программный модуль T100 получает первую временную базу из сигнала, принятого от базовой станции сети для радиосвязи. Например, сеть может быть сетью для сотовой телефонной связи, такой как сеть AMPS (усовершенствованная система мобильной телефонной связи), сеть GSM (глобальная система связи с подвижными объектами), или сеть, соответствующая одному или более стандартам CDMA (множественного доступа с кодовым разделением каналов), таким как промежуточный стандарт IS-95 ассоциации промышленности средств связи / ассоциации электронной промышленности (TIA/EIA IS-95), «MOBILE STATION-BASE STATION COMPATIBILITY STANDARD FOR DUAL-MODE WIDEBAND SPREAD SPECTRUM CELLULAR SYSTEM», опубликованный в июле 1993 г.; TIA/EIA/IS-835-A, «CDMA2000 WIRELESS IP NETWORK STANDARD», опубликованный в мае 2001 г.; TIA/EIA/IS-856, «CDMA2000 WIRELESS IP NETWORK STANDARD», опубликованный в ноябре 2000 г.; TIA/EIA/IS-2000.1-A, «INTRODUCTION TO CDMA2000 STANDARD FOR SPREAD SPECTRUM SYSTEMS», опубликованный в марте 2000 г.; и другим пяти документам, относящихся к серии промежуточного стандарта IS-2000; и TIA/EIA/IS-707-A, «DATA SERVICE OPTIONS FOR WIDEBAND SPREAD SPECTRUM SYSTEMS», опубликованный в апреле 1999 г.
Сеть для радиосвязи может включать в себя один или более повторителей, причем каждый повторитель принимает и ретранслирует сигнал, передаваемый базовой станцией. Такие устройства могут использоваться для обеспечения доступности сигнала в областях с затрудненным приемом, таких как городские каньоны или туннели метро. Альтернативно повторители могут использоваться для расширения эффективной зоны обслуживания базовой станции в малонаселенных (например, сельских) областях. В некоторых случаях повторитель может передавать сигнал, немного отличающийся от сигнала, который он повторяет (например, для того, чтобы отличать ретранслированный сигнал от исходного сигнала, или для идентификации сигнала, как передаваемого с помощью повторителя). Например, повторитель DSSS CDMA сигнала может слегка частотно модулировать сигнал перед передачей и/или может применять отличающийся код расширения. В другом применении способа M100 программный модуль T100 получает первую временную базу из сигнала, принятого от повторителя.
В некоторых применениях способа M100 принятый сигнал - сигнал с расширением спектра. Такой сигнал модулируют с помощью периодического кода расширения (например, с помощью псевдослучайного шумового (ПСШ) кода), который имеет частоту следования элементарных сигналов намного выше, чем частота символов сообщения данных, которые переносят с помощью этого сигнала. В системе расширения спектра прямой последовательностью (DSSS), например, поток данных умножают (например, с помощью выполнения операции «исключающее ИЛИ») на один или более код расширения спектра перед модуляцией несущей. Временной сдвиг кода сигнала с расширением спектра является свойством, которое известно из предшествующего уровня техники, и он может определяться как разница во времени между (A) периодическим кодом расширения, как он появляется в сигнале при тесте, и (B) копией кода расширения, которая выровнена с предопределенной системой отсчета времени (началом отсчета времени).
Фиг.2 показывает воплощение T102 программного модуля T100, которое может выполняться в применении к расширению спектра. Программный модуль T110 получает временной сдвиг кода принятого сигнала. В применении DSSS, например, программный модуль T110 может коррелировать одну или более копий (например, имеющих различные задержки) кода расширения спектра с принятым сигналом (например, после демодуляции несущей) для получения временного сдвига кода. Альтернативно, программный модуль T110 может получать временной сдвиг кода из блока поиска, который описан в патенте США №5 764 687 «MOBILE DEMODULATOR ARCHITECTURE FOR A SPREAD SPECTRUM COMMUNICATION SYSTEM» либо в патенте США №6 363 108 «PROGRAMMABLE MATCHED FILTER SEARCHER», или другого устройства корреляции, или минимальной среднеквадратической ошибки (MMSE).
Может быть желательно получить временную базу, которая однозначна по интервалу, большему чем период кода расширения. В дополнительном применении способа M100 принятый сигнал имеет информационное сообщение времени. Например, такое сообщение может определять время (например, в часах, минутах, секундах и/или долях секунды), которое имеет предопределенную зависимость от времени, когда сигнал был передан. Такое сообщение может также определять дату, имеющую предопределенную зависимость от времени, когда сигнал был передан.
Фиг.3 показывает воплощение T104 программного модуля T100, которое может выполняться в таком применении. Программный модуль T120 получает информационное сообщение времени из принятого сигнала. Например, программный модуль T120 может включать в себя декодирование информационного сообщения времени из демодулированного принятого сигнала. В применении DSSS, программного модуля T120 может декодировать информационное сообщение времени с помощью сжатия спектра (т.е. с помощью применения одного или большего количества кодов расширения, таких как ПСШ коды) или с помощью демодулирования (т.е. с помощью применения одного или более модулирующих кодов, таких как коды Уолша, или других ортогональных или почти ортогональных кодов) к принятому сигналу. Декодирование информационного сообщения времени может также включать в себя такие операции обработки данных как обратное перемежение потока данных, декомпрессия данных и декодирование одного или более из сверточных кодов, турбо кодов и/или кодов четности. В другом воплощении программный модуль T120 может выполняться после программного модуля T200.
Первая временная база может быть представлена значением, полученным из принятого сигнала (например, временным сдвигом кода). Альтернативно первая временная база может быть представлена с помощью синхронизирующего устройства (схемы синхронизации), значения счетчика или другого такого устройства, или величиной, которую устанавливают согласно значению, полученному из принятого сигнала. Например, программный модуль T100 может также включать в себя синхронизацию синхронизирующего устройства, такого как гетеродин или часы, или настройку счетчика, или генератора кода, согласно полученному временному сдвигу кода и/или информационному сообщению времени.
Фиг.4 показывает воплощение T106 программного модуля T100, которое включает в себя программные модули T110 и T120. В одном таком применении способа M100 программный модуль T110 получает временной сдвиг кода из одного канала принятого сигнала, и программный модуль T120 декодирует информационное сообщение времени из другого канала принятого сигнала. В случае, когда принятый сигнал принимают от базовой станции сети CDMA для сотовой телефонной связи, например временной сдвиг кода может быть получен из пилот-канала, в то время как информационное сообщение времени может быть получено из канала синхронизации. В таком случае спектр этих двух каналов может расширяться, используя различные коды расширения (например, псевдослучайные шумовые коды) и/или модулироваться, используя различные модулирующие коды (например, коды Уолша).
Предопределенное смещение основано на задержке распространения принятого сигнала. Задержка распространения может быть получена с помощью прямого измерения и/или может быть рассчитана согласно длине тракта передачи сигналов между передатчиком на земле и точкой приема (такое вычисление может учитывать многолучевые отражения). Предопределенное смещение может также быть основано на других факторах, таких как ошибки калибровки, которые могут включать в себя задержки обработки сигналов (аналоговой и/или цифровой) в точке приема, задержки обработки сигналов в передатчике на земле и/или задержки передачи сигналов (например, которые вызваны кабелем антенны).
Программный модуль T200 получает вторую временную базу, применяя предопределенное смещение к первой временной базе. В примерном применении способа M100 предопределенное смещение применяют к первой временной базе, вычитая смещение из временной базы (т.е. фактически возвращая первую временную базу назад во времени). Программный модуль T200 может включать в себя синхронизацию синхронизирующего устройства, такого как гетеродин или часы, или корректировку счетчика или генератора кода, согласно результату применения предопределенного смещения к первой временной базе.
Базовая станция сети CDMA для сотовой телефонной связи, которая совместима по меньшей мере с одним из стандартов IS-95/2000, которые упоминают выше, передает DSSS модулированный с помощью ФМ сигнал согласно временной базе, которая выровнена с временной базой GPS NAVSTAR. Более конкретно кодовая последовательность расширения спектра в сигнале, передаваемом такой базовой станцией, синхронизируется с временной базой GPS следующим образом: каждые восемьдесят миллисекунд начало кода расширения спектра CDMA (который имеет период 80/3 или 26,666... миллисекунд) совпадает с началом GPS C/A последовательности (которая имеет период одну миллисекунду), которая передается КТС.
В конкретном применении способа M100 первую временную базу получают из сигнала, принятого от базовой станции сети CDMA для сотовой телефонной связи, которая совместима с таким стандартом (или от повторителя такого сигнала). При применении предопределенного смещения (например, при выполнении программного модуля T200) получают вторую временную базу, которая выровнена с временной базой GPS NAVSTAR. Другими словами, задержки распространения и возможно другие задержки тракта приема сигналов компенсируют так, чтобы вторая временная база (например, поддерживаемая локальными часами или гетеродином) была по существу той же самой, как выровненная по GPS временная база, поддерживаемая базовой станцией (которая по стандарту должна находиться в пределах десяти микросекунд фактической временной базы GPS, и обычно находится в пределах одной микросекунды этой временной базы).
Программный модуль T300 генерирует синхронизирующий сигнал, основываясь на второй временной базе. В одном применении программный модуль T300 генерирует сигнал, спектр которого расширяют с помощью кода ПСШ (например, GPS C/A последовательности), чье начало по существу совпадает с началом C/A последовательности, которая передается КТС GPS. Другими словами временной сдвиг кода такого синхронизирующего сигнала синхронизируют с временной базой GPS.
В примерном воплощении программный модуль T300 создает C/A код GPS для синхронизирующего сигнала с помощью операции «исключающее ИЛИ» с выводами двух линейных регистров сдвига с обратной связью (LFSR): один LFSR для синфазной составляющей синхронизирующего сигнала и другой - для квадратурной составляющей синхронизирующего сигнала. Начальное состояние для синфазного LFSR является тем же самым для всех кодов C/A, в то время как начальное состояние для квадратурного LFSR зависит от номера выбранного ПСШ кода. При таком воплощении программный модуль T300 может использовать ПСШ последовательности 33-37 (которые не назначены спутникам) или может использоваться любой другой из 1023 возможных C/A кодов GPS (ПСШ последовательности, имеющие меньший номер, имеют лучшие корреляционные свойства), возможно, исключая ПСШ последовательности 1-32 (которые зарезервированы для КТС).
В одном воплощении программного модуля T300 синхронизирующий сигнал передают без модуляции с помощью потока данных (например, сигнал модулируют с помощью строки нулей). Такое воплощение может иметь преимущество разрешения более низкой передаваемой мощности с помощью поддержки более длительного периода когерентного интегрирования (например, для более эффективного отношения сигнал-шум) в приемнике синхронизирующего сигнала. Преимущества, относящиеся к более низкой передаваемой мощности, могут включать в себя увеличенный срок службы аккумулятора, уменьшенные помехи существующим системам и большие возможности развития. В одном примере такое воплощение применено к ситуации, когда синхронизирующая информация, которая однозначна по интервалу, большему, чем период кода синхронизирующего сигнала, уже доступна или иначе не нужна.
В другом воплощении программного модуля T300 код синхронизирующего сигнала модулируют с помощью предопределенного образца данных. В одном таком примере код модулируют с требуемой скоростью (частотой) передачи данных (например, со скоростью передачи данных GPS 50 битов в секунду) с помощью потока чередующихся нулей и единиц. Такое воплощение может иметь преимущество обеспечения информации, относящейся к обнаружению фронта разрядного импульса, на приемник синхронизирующего сигнала. В другом примере код модулируют с требуемой частотой с помощью образца данных, имеющего более длинный период. Такой пример может использоваться для обеспечения информации синхронизации, которая однозначна по длине периода образца данных. Даже в ситуации, когда данные, представляющие другую информацию, модулируют на синхронизирующий сигнал, предопределенный образец данных может использоваться для заполнения промежутков, когда такие данные не доступны или не запланированы для передачи.
В некоторых применениях может потребоваться, чтобы синхронизирующий сигнал передавал информацию синхронизации, которая однозначна по интервалу, большему, чем период кода расширения. Для синхронизирующего сигнала также может потребоваться передавать другие типы информации, не обязательно относящиеся к синхронизации. В таких случаях, в дополнение к временному сдвигу кода, синхронизирующий сигнал может модулироваться с помощью данных, представляющих другую информацию, как описано ниже.
В GPS NAVSTAR время считают в 1,5-секундных периодах и текущая временная база сообщается каждым КТС в 29-битном двоичном числе, называемом Z-счетчиком. Z-счетчик имеет две части: десять старших значащих битов указывают последовательный номер текущей недели GPS по модулю 1024, а младшие значащие 19 битов указывают количество периодов, которые прошли, начиная с перехода от предыдущей недели (также называют временем недели или TOW счетчиком, и соответствует началу следующего подкадра).
Навигационное сообщение GPS NAVSTAR включает в себя серию из пяти подкадров, каждый подкадр имеет длину 300 битов. В некотором отношении подкадры подобны. Например, каждый подкадр начинается с 30-битного слова телеметрии (TLM), содержимое которого обычно постоянно, сопровождается 30-битным словом передачи обслуживания (HOW), которое начинается с 17 старших значащих битов счетчика TOW. В других отношениях подкадры отличаются. Подкадр 1 включает в себя десять старших значащих битов Z-счетчика (т.е. номер недели GPS по модулю 1024) и параметры коррекции часов спутников. Подкадры 2 и 3 включают в себя параметры, которые указывают расположение, скорость и направление КТС (также называемые «эфемеридными данными»). Подкадры 4 и 5 включают в себя данные календаря.
В дополнительном воплощении способа M100 синхронизирующий сигнал модулируют с помощью данных, представляющих информацию, которая имитирует некоторую часть навигационного сообщения GPS. Например, синхронизирующий сигнал может модулироваться с помощью информационного сообщения времени с частотой передачи данных GPS 50 Гц, которая имеет соответствующую копию (например, относительно формата и расположения в пределах сообщения) по меньшей мере части Z-счетчика GPS (например, HOW).
В другом примере синхронизирующий сигнал модулируют с помощью данных, которые идентифицируют широту и долготу точки передачи (например, в части эфемеридных данных, соответствующей подходящей части подкадров 2 и/или 3 GPS). Такая информация о местоположении может измеряться и записываться, когда начинается выполнение способа, и может модифицироваться в случае, куда точка передачи перемещается. В одном таком воплощении, например, синхронизирующий сигнал модулируют с помощью эфемеридных данных, которые описывают Керлеровское снижение орбиты спутника непосредственно перед взаимодействием с Землей (например, в точке приема).
В дополнительном примере синхронизирующий сигнал модулируют с помощью информации, которая обычно постоянна в навигационном сообщении GPS (например, слово TLM). Такая информация может облегчать прием переданного синхронизирующего сигнала (например, помогая в интегрировании сигнала).
В воплощениях для других применений GPS синхронизирующий сигнал может модулироваться с помощью данных, которые не соответствуют данным в навигационном сообщении GPS. В применении к сети для радиосвязи, например, дополнительная информация может приниматься по каналу поискового вызова. В сети CDMA для сотовой телефонной связи такая информация может включать в себя данные, идентифицирующие базовую станцию (например, идентификационный номер базовой станции, или «BSID»), данные, относящиеся к другим сетевым параметрам (например, информация, идентифицирующая диапазон частот CDMA и/или частотный слот в пределах такого диапазона, сетевой идентификационный номер, или «NID», идентификационный номер системы, или «SID»), и/или данные, передаваемые в форме широковещательного сообщения. Информация, принятая таким или другим образом, может передаваться, чтобы появиться в синхронизирующем сигнале.
Другая информация, которая включает в себя данные, модулирующие синхронизирующий сигнал, может идентифицировать или иначе относиться к устройству, которое выполняет воплощение способа M100 (или воплощение другого способа согласно варианту осуществления изобретения, или части такого способа). Например, значения, относящиеся к расположению, окружающей или рабочей температуре, уровне резерва мощности и/или оцененной погрешности синхронизации, могут сообщаться через синхронизирующий сигнал. Программный модуль T300 может также включать в себя операции обработки данных, такие как перемежение, кодирование (например, сверточное кодирование, турбокодирование и/или кодирование с помощью четности) и выкалывание.
Даже в применении GPS скорость передачи данных синхронизирующего сигнала не должна быть ограничена 50 битами в секунду навигационного сообщения. Например, скорость передачи данных сигнала, спектр которого расширяют, используя C/A код GPS, может достигать 1000 битов в секунду. В одном применении, по меньшей мере, часть синхронизирующего сигнала приспосабливают к передаче данных с более высокой скоростью формата, основанного на GPS WAAS (системе панорамного обзора), в которой передают со скоростью передачи данных 500 битов в секунду.
Фиг.5 показывает последовательность операций способа M200 согласно варианту осуществления изобретения. Программный модуль T400 передает синхронизирующий сигнал. Для применения GPS NAVSTAR программный модуль T400 может передавать синхронизирующий сигнал на несущей частоте GPS L1, используя модуляцию BPSK (например, с ограниченной временем формой прямоугольных импульсов). В других применениях синхронизирующий сигнал может модулироваться на один или более несущих сигналов согласно схеме амплитудной модуляции (AM), такой как амплитудная манипуляция (АМн, OOK); схеме частотной манипуляции (ЧМн, FSK); схеме фазовой манипуляции (ФМн, PSK), такой как двоичная фазовая манипуляция (ДФМн, BPSK), квадратурная фазовая манипуляция (КФМн, QPSK), восьмеричная фазовая манипуляция (ВФМн, 8-PSK) или квадратурная фазовая манипуляция со сдвигом (КФМнС, OQPSK); схеме манипуляции с минимальным сдвигом (МнМС, MSK), такой как Гауссова манипуляция с минимальным сдвигом (Гауссова MSK); или смешанной схеме, такой как квадратурная амплитудная модуляция (КВАМ, QAM). Программный модуль T400 может также включать в себя операции обработки сигналов, такие как фильтрация (например, формирование импульса), усиление и сравнение полного сопротивления.
В случае, когда синхронизирующий сигнал (или его изображение или гармоника) передают на частоте или около частоты, которая используется существующей системой, можно столкнуться с проблемой «ближний предел - дальний предел» или с другой проблемой помех. Например, приемник сигналов GPS NAVSTAR обычно предназначен для приема сигналов КТС с уровнем мощности -160 дБВт. Корреляция самого плохого случая между двумя кодами GPS C/A, как оценивают, равна -21,6 дБ. Поэтому взаимные корреляции между сигналами от КТС GPS и синхронизирующим сигналом, расширенным с помощью C/A кода GPS и модулированного с помощью BPSK на несущую L1 могут, как ожидается, начаться только с принимаемого уровня мощности -138,4 дБВт. Например, сигнал, спектр которого расширен с помощью ПСШ C/A кода GPS, большего 32, может таким образом создавать помехи работе приемника GPS, даже если конкретный приемник не распознает ПСШ C/A коды, большие 32. В одном воплощении программный модуль T400 передает синхронизирующий сигнал на уровне мощности, который выбран согласно факторам, таким как необходимый «ближний предел» (т.е. радиус, в пределах которого могут возникать помехи существующей системе), и «дальний предел» (т.е. радиус, вне которого передаваемый синхронизирующий сигнал слишком слаб для приемлемого приема).
В другом воплощении программный модуль T400 передает синхронизирующий сигнал по несущей, центральная частота которой сдвинута относительно частоты существующей системы. В одном таком воплощении центральная частота передаваемого синхронизирующего сигнала размещена в спектральном нуле сигнала существующей системы. Например, синхронизирующий сигнал может передаваться на частоте, которая сдвинута от несущей частоты GPS L1 на 1,023 МГц. В некоторых применениях такого воплощения может потребоваться изменить маршрут обработки сигналов приемника, чтобы гарантировать, что передаваемый синхронизирующий сигнал является частью полосы пропускания приемника.
В другом воплощении программный модуль T300 использует отличающийся код C/A для расширения спектра синхронизирующего сигнала. Например, может использоваться более длинный код с той же самой частотой элементарных сигналов, или может использоваться код с другой частотой элементарных сигналов (например, частота элементарных сигналов 10 МГц, используемая P кодом GPS NAVSTAR).
В дополнительном воплощении программный модуль T400 изменяет уровень мощности передаваемого синхронизирующего сигнала через какое-то время. Например, передаваемый синхронизирующий сигнал может быть импульсным в рабочем цикле приблизительно 10% с продолжительностью импульсов приблизительно 100 микросекунд.
В способе согласно другому варианту осуществления изобретения предопределенное смещение, которое описано выше, может уже быть внедрено в принятый сигнал. Например, передатчик на земле (например, базовая станция или повторитель), передающий сигнал с расширенным спектром, может опережать временной сдвиг кода сигнала согласно предопределенному смещению. В таком случае синхронизирующий сигнал может быть основан на временной базе принятого сигнала.
Фиг.6 показывает структурную схему устройства 100 согласно варианту осуществления изобретения. Процессор 110 временной базы применяет предопределенное смещение к первой временной базе для получения второй временной базы. Генератор 120 синхронизирующего сигнала генерирует синхронизирующий сигнал, временной сдвиг кода которого основан на второй временной базе.
Процессор 110 временной базы и генератор 120 синхронизирующего сигнала могут каждый включать в себя один или более процессоров и/или массивов логических элементов. Такие массивы могут воплощаться как универсальные устройства (такие как микропроцессоры или другие процессоры обработки цифровых сигналов), воплощенные в пределах одной или более специализированных интегральных схем (СпИС), и/или программироваться в одном или более конфигурируемых устройствах, таких как программируемые пользователем вентильные матрицы (ППВМ, FPGA). В некоторых применениях тот же самый массив или массивы могут служить процессором 110 временной базы (или его частью) в одно время и генератором 120 синхронизирующего сигнала (или его частью) в другое время. Также возможно для такого массива или массивов выполнять параллельно программного модуля и процессора 110 временной базы, и генератора 120 синхронизирующего сигнала. Альтернативно или дополнительно один или оба процессор 110 и генератор 120 могут включать в себя набор команд, выполняемых в одном или большем количестве таких массивов логических элементов.
Фиг.7 показывает структурную схему воплощения 102 устройства 100. Часы 90 временной базы могут включать в себя синхронизирующее устройство, такое как гетеродин, и могут также включать в себя счетчик (в аппаратных средствах, в аппаратно-программных средствах и/или в программном обеспечении), управляемый синхронизирующим устройством. В одной схеме устройства 102 часы 90 временной базы обеспечивает процессор 110 временной базы первой временной базой. В другой схеме устройства 102 процессор 110 временной базы применяет предопределенное смещение к первой временной базе, которая получена из принятого сигнала, и направляет это значение к часам 90 временной базы, данные часы затем поддерживают вторую временную базу.
Фиг.8 показывает структурную схему воплощения 200 устройства 100. Блок 130 поиска получает временной сдвиг кода принятого сигнала и может включать в себя любое подходящее устройство корреляции или устройство минимальной среднеквадратической ошибки (MMSE). Декодер 140 получает информационное сообщение времени из принятого сигнала и может выполнять такие операции, как сжатие спектра, декомпрессию, обратное перемежение и декодирование сверточных кодов, турбокодов и/или кодов четности. Воплощение устройства 100 может также включать в себя каналы приема (например, в пределах декодера 140), которые назначают (например, блоком 130 поиска) для сжатия спектра отдельных многолучевых экземпляров принятого сигнала.
Фиг.9 показывает структурную схему воплощения 202 устройства 200. Процессор 110 временной базы устанавливает часы 90 временной базы согласно первой временной базе, и после этого часы 90 временной базы обеспечивают процессор 110 временной базы первой временной базой. В другой схеме устройства 202 процессор 110 временной базы применяет предопределенное смещение к первой временной базе, полученной из принятого сигнала, и передает это значение часам 90 временной базы, данные часы затем поддерживают вторую временную базу.
Фиг.10 показывает приемопередатчик 300 согласно варианту осуществления изобретения. Приемник 150 принимает принимаемый сигнал, и передатчик 160 передает синхронизирующий сигнал. Приемник 150 может фильтровать и/или усиливать принятый сигнал и преобразовывать с понижением частоты данный сигнал к основной полосе частот. Передатчик 160 может преобразовывать с повышением частоты синхронизирующий сигнал к РЧ и усиливать и/или фильтровать данный сигнал. Фиг.11 показывает структурную схему воплощения 302 устройства 300, которая включает в себя часы 90 временной базы.
Принимаемые и передаваемые сигналы могут отличаться частотой, амплитудой и/или полосой пропускания. Принимаемые и передаваемые сигналы могут также отличаться схемами модуляции, в соответствии с которыми каждый сигнал создан. Например, сигналы могут модулироваться согласно схеме амплитудной модуляции (AM), такой как амплитудная манипуляция (АМн, OOK); схеме частотной манипуляции (ЧМн, FSK); схеме фазовой манипуляции (ФМн, PSK), такой как двоичная фазовая манипуляция (ДФМн, BPSK), квадратурная фазовая манипуляция (КФМн, QPSK), восьмеричная фазовая манипуляция (ВФМн, 8-PSK) или квадратурная фазовая манипуляция со сдвигом (КФМнС, OQPSK); схеме манипуляции с минимальным сдвигом (МнМС, MSK), такой как Гауссова манипуляция с минимальным сдвигом (Гауссова MSK); или смешанной схеме, такой как квадратурная амплитудная модуляция (КВАМ, QAM). Приемопередатчик 300 может, но не обязательно должен создаваться или конфигурироваться для приема и передачи сигналов подобного вида.
В некоторых применениях различные элементы приемопередатчика 300 воплощают как многофункциональные модули и/или как взаимосвязанные модули. Дополнительно, такие модули могут располагаться в многочисленных дискретных устройствах в некоторых вариантах осуществления.
В примерном применении приемопередатчик 300 принимает сигналы от базовой станции сети CDMA для сотовой телефонной связи (например, по части диапазона 800 МГц, 1,7 ГГц или 1,9 ГГц) и передает синхронизирующий сигнал, спектр которого расширен с помощью C/A кода GPS и который модулирован с помощью BPSK на несущую L1. В конкретном варианте осуществления декодер 140 выводит каждые 80 миллисекунд стробирующий сигнал, который синхронизирован с началом и ПСШ кода принятого сигнала CDMA, и C/A кода GPS, к которому его синхронизация относится. В других схемах устройства 100, как показано на Фиг.8-11, декодер 140 может находиться ниже (по тракту распространения сигнала) процессора 110 временной базы, например, так, чтобы предопределенное смещение применялось к сигналу, вводимому в декодер 140.
В некоторых применениях соответствующее воплощение приемопередатчика 300 может использоваться для усиления возможности определения местоположения в средах, где обнаружение сигнала GPS трудно или невозможно: например, в городском каньоне, в закрытом помещении или под землей. В таких случаях приемопередатчик 300 может размещаться в здании, в метро или в другом туннеле, в области торгово-промышленной деятельности под землей или в другой подземной структуре или области, такой как пещера. В некоторых таких применениях воплощение приемопередатчика 300, который не требует видимости сигнала спутника GPS, может свободно перемещаться и устанавливаться в пределах его среды (может подвергаться перекалибровке предопределенного смещения).
Воплощение приемопередатчика 300 может включать в себя один или более энергонезависимых параметров. Например, генератор 120 синхронизирующего сигнала может обращаться к одному или более таких параметров для конфигурирования одного или более кодов, используемых для расширения спектра и/или модулирования синхронизирующего сигнала (например, номер ПСШ GPS). По меньшей мере некоторые из этих параметров могут программироваться, например, через клавиатуру или внешнее соединение для передачи данных.
Может быть создано воплощение приемопередатчика 300, которое совместно с телефоном для сотовой связи использует многие аппаратные средства, но не обязано включать в себя дисплей или устройство ввода данных (например, клавиатуру), имеет более слабый усилитель мощности, и/или получает электропитание по меньшей мере частично от батарей и/или от окружающей (например, солнечной) энергии или от некоторого другого внешнего источника питания.
Фиг.12 - структурная схема конкретного воплощения 305 приемопередатчика 300. Полосовой фильтр (ПФ) 710 передает сигналы в выбранном диапазоне телефонной сотовой связи CDMA. Малошумный усилитель (МШУ) 720 усиливает принятый сигнал до требуемого уровня. Принимающий преобразователь 730 с понижением частоты нулевой промежуточной частоты (НПЧ, ZIF) преобразует с понижением частоты принятый сигнал к основной полосе частот. В примерном воплощении принимающий преобразователь 730 с понижением частоты НПЧ включает в себя RFR6000™ микросхему преобразования РЧ к основной полосе частот приема (QUALCOMM Incorporated, Сан-Диего, Калифорния). В других вариантах осуществления принятый сигнал может преобразовываться с понижением частоты к промежуточной частоте и затем к основной полосе частот.
Процессор 740 получает первую временную базу из сигнала основной полосы частот, выводимого преобразователем 730 с понижением частоты. Процессор 740 затем применяет предопределенное смещение и генерирует синхронизирующий сигнал, как описано в данной работе (например, синхронизирующий сигнал модулируют с помощью данных, представляющих информацию, которая основана по меньшей мере на части формата навигационного сообщения GPS). Например, процессор 740 может включать в себя процессор основной полосы частот MSM6000™ или MSM6050™ (QUALCOMM Inc.), сконфигурированный для обеспечения 80-миллисекундного временного строба (синхронизированного с началом и ПСШ кода принятого сигнала CDMA, и C/A кода GPS, к которому относится его синхронизация) к одному или более дополнительным процессорам.
Передающий преобразователь 750 с повышением частоты ZIF преобразовывает с повышением частоты синхронизирующий сигнал из основной полосы частот к РЧ для передачи. Передающий преобразователь 750 с повышением частоты НПЧ может включать в себя предающий преобразователь из основной полосы частот к РЧ RFT6100™ (QUALCOMM Inc.) или другое устройство, способное передавать на требуемой частоте. В других вариантах осуществления синхронизирующий сигнал может преобразовываться с повышением частоты к промежуточной частоте и затем к РЧ. Усилитель мощности (УМ) 760 усиливает сигнал РЧ, выводимый передающим преобразователем 750 с повышением частоты НПЧ, до требуемого уровня для передачи, и полосовой фильтр 770 GPS фильтрует усиленный сигнал, как требуется до передачи.
Предшествующее описание вариантов осуществления предлагаемого изобретения представлено для обеспечения возможности любому специалисту изготовлять или использовать настоящее изобретение. Различные модификации к этим вариантам осуществления возможны, и представленные универсальные принципы могут применяться к другим вариантам осуществления. Например, изобретение может воплощаться частично или полностью как аппаратная схема или как конфигурация схемы, изготовленной в специальной интегральной схеме.
Данное изобретение может также воплощаться частично или полностью, как программа встроенного программного обеспечения, загруженная в энергонезависимую память, или как программа, загружаемая с или на носитель хранения данных, как машинно-считываемый код. Такой код является командами, выполняемыми массивом логических элементов, как описано выше. В одном примере носитель хранения данных является полупроводниковой микросхемой (или его частью), такой как СпИС или модуль оперативной памяти (например, КМОП-памяти (комплементарный металло-оксидный полупроводник), флэш-памяти или ферроэлектрической памяти). В другом варианте носитель данных является магнитным, оптическим, магнитооптическим носителем или носителем с изменением фазы в дисковой или ленточной форме (например, дискета, или жесткий диск, или компакт-диск) или сменным модулем (например, плата в формате PCMCIA, CompactFlash, SmartMedia или MemoryStick).
Таким образом, настоящее изобретение не ограничено описанными выше вариантами осуществления, а скорее объединяет самые широкие возможности, совместимые с принципами и отличительными признаками, раскрытыми в представленной формуле изобретения.
Изобретение относится к радиосвязи. Устройство для радиосвязи согласно изобретению включает в себя получение первой временной базы (например, получение временного сдвига кода) из сигнала, принятого от передатчика на земле. Предопределенное смещение, основанное по меньшей мере на задержке распространения принятого сигнала, применяют к первой временной базе для получения второй временной базы. Например, вторая временная база может выравниваться с временной базой спутниковой системы определения местоположения (например, GPS NAVSTAR). Генерируют синхронизирующий сигнал, который имеет временной сдвиг кода, основанный на второй временной базе. 5 з.п. ф-лы, 12 ил.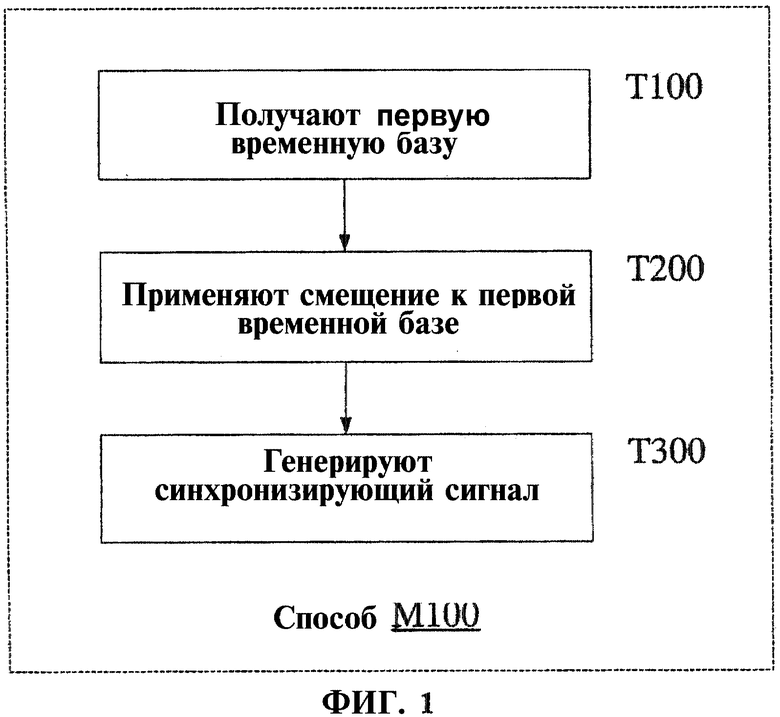
| СПОСОБ И СИСТЕМА ПОЗИЦИОНИРОВАНИЯ | 1997 |
|
RU2161318C2 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2167431C2 |
| RU 2124214 C1, 27.12.1998 | |||
| Устройство для автоматического регулирования возбуждения синхронных двигателей | 1941 |
|
SU64091A1 |
| US 5646630 A, 08.07.1997. | |||

