Изобретение относится к средствам механизации подготовительных работ при подземной добыче полезных ископаемых и предназначено для направленного проведения восстающих скважин по породам различной крепости.
Известна сбоечно-буровая машина, содержащая приводной исполнительный орган с породоразрушающими инструментами, приводные гусеничные тележки и узел их распора в виде цилиндра, установленного с возможностью взаимодействия с шарнирно-рычажными механизмами, связанными с тележками (Авт.св. СССР № 101918, опубл. 26.01.1956). В этой машине трансмиссия исполнительного органа подвергается высоким динамическим воздействиям, а изменение направления движения машины осуществляется путем изменения положения исполнительного органа относительно продольной оси, что не обеспечивает требуемую маневренность машины.
Известна буровая машина для проведения восстающих скважин (Патент РФ №2169840, опубл. 27.06.2001), содержащая приводной исполнительный орган с породоразрушающими инструментами, приводные гусеничные тележки и узел их распора в виде цилиндра, установленного с возможностью взаимодействия с шарнирно-рычажными механизмами, связанными с тележками. При этом каждый шарнирно-рычажный механизм содержит устройство отклонения тележки в виде регулируемой тяги с механизмом изменения ее длины. В данной машине не обеспечена достаточная степень ее управляемости.
Задачей изобретения является повышение степени управляемости буровой машины за счет повышения точности ее движения по заданной траектории оси скважины.
Эта задача решается буровой машиной для проведения восстающих скважин, включающей приводной исполнительный орган с породоразрушающими инструментами, приводные гусеничные тележки и узел их распора, установленный с возможностью взаимодействия с шарнирно-рычажными механизмами, связанными с гусеничными тележками и содержащими устройства отклонения гусеничных тележек в виде регулируемых тяг с механизмами изменения их длины, которая согласно изобретению снабжена реактивными тягами, соединенными с узлом распора гусеничных тележек и с одним из рычагов шарнирно-рычажных механизмов, расположенных со стороны, противоположной приводному исполнительному органу, при этом в качестве регулируемых тяг устройств отклонения гусеничных тележек выполнен один из рычагов шарнирно-рычажных механизмов, расположенных со стороны приводного исполнительного органа, выполненный регулируемым, а механизмы изменения длины регулируемых рычагов выполнены с фиксаторами этого изменения.
Соединение с помощью реактивных тяг узла распора гусеничных тележек с одним из рычагов шарнирно-рычажных механизмов, расположенных со стороны, противоположной приводному исполнительному органу, преследует цель перераспределения нагрузки на приводные гусеничные тележки, предотвращая, тем самым, их скатывание сверху вниз.
Выполнение в заявленной буровой машине в качестве регулируемых тяг одного из рычагов шарнирно-рычажных механизмов, расположенных со стороны приводного исполнительного органа, выполненного регулируемым с возможностью фиксации изменения его длины, в отличие от прототипа, позволяет исключить произвольное изменение длины регулируемых тяг (регулируемых рычагов) и изменять отклонение приводных гусеничных тележек относительно оси проходимой скважины не вслепую, а находить точку отсчета коррекции направления движения.
На чертеже приведена принципиальная схема буровой машины.
Буровая машина предназначена для бурения снизу вверх сплошным забоем восстающих скважин под углом 45-90° диаметром с последующим расширением обратным ходом. Все приводы и системы регулирования машины выполнены гидравлическими.
Машина содержит приводной исполнительный орган 1 планетарного типа с породоразрушающими инструментами, а также гидромеханическую приводную систему 2, обеспечивающую работу исполнительного органа 1. Учитывая, что горно-геологические условия при бурении скважины могут быть различными, приводной исполнительный орган 1 может быть сменным, т.е. он может быть планетарно-динамическим или планетарным органом резания, предполагая возможность замены органа скола на орган резания.
Перемещение машины по скважине обеспечивается гусеничным ходовым устройством, которое содержит три гусеничные тележки 3, расположенные под утлом 120° и прижимаемые к стенкам скважины с помощью гидромеханического узла 4 распора. При этом каждая тележка 3 связана с узлом распора 4 парой соответствующих шарнирно-рычажных механизмов, состоящих из рычагов 5 и 6. Гидромеханическая приводная система 2 производит перераспределение нагрузок, действующих на различные узлы и элементы буровой машины. Гидромеханический узел 4 распора создает общее усилие, распределяемое на шарнирно-рычажные механизмы.
Шарнирно-рычажные механизмы, расположенные со стороны приводного исполнительного органа 1, содержат рычаги 5 постоянной длины, соединенные с гусеничными тележками 3, и регулируемые рычаги 6 (регулируемой длины), выполненные с механизмами изменения их длины, например в виде винтовых устройств 7 с фиксаторами 8 этих изменений, и соединенные с гидромеханическим узлом 4 распора. Фиксатор 8 может быть выполнен, например, в виде контрящей гайки или клинового стопора. Каждый механизм изменения длины регулируемых рычагов 6 может быть снабжен шкалой, показывающей изменение этой длины.
Выполнение в качестве регулируемых тяг одного из регулируемых рычагов шарнирно-рычажных механизмов с фиксатором 8 позволяет не только повысить точность движения буровой машины по заданной траектории оси скважины, но и сократить количество устройств отклонения гусеничных тележек с шести, в прототипе, до трех в заявляемой буровой машине, т.е. устанавливать их не для каждого шарнирно-рычажного механизма, а только для шарнирно-рычажных механизмов, расположенных со стороны приводного исполнительного органа 1.
Шарнирно-рычажные механизмы, расположенные со стороны, противоположной приводному исполнительному органу 1, содержат рычаги 9 и 10 постоянной длины. Для предотвращения скатывания гусеничных тележек 3 сверху вниз и повышения степени управляемости буровой машиной установлены реактивные тяги 11, соединяющие рычаги 10 шарнирно-рычажных механизмов, расположенных со стороны, противоположной приводному исполнительному органу 1, с узлом 4 распора. Рычаги 9 шарнирно-рычажных механизмов, расположенных со стороны, противоположной приводному исполнительному органу 1, соединены с гусеничными тележками 3.
Регулируя длину рычагов 6, производят отклонение тележек относительно оси проходимой скважины, в результате чего осуществляют поворот всей машины. Для предотвращения произвольного отклонения буровой машины от оси из-за динамических нагрузок, вибраций, ударов длину рычагов 6 не только регулируют, но и фиксируют каждое изменение для нахождения точки отсчета, от которой корректируют направление движения.
Положение машины в скважине определяют с помощью установленного на ней автономного визирующего устройства 12, например лазерного источника света.
Управление буровой машиной производится дистанционно с пульта, расположенного в горной выработке, из которой запускается буровая машина в проходимый массив (выработку) с помощью пускодоставочной тележки (на чертеже не показаны).
Заявленное устройство работает следующим образом.
Машину на стартовой тележке устанавливают в выработке, откуда должна подводиться скважина. Там же размещают энергоблок и пульт управления. Затем производят забуривание машины в кровлю выработки на глубину, достаточную для ее автономной работы. После этого стартовую тележку убирают, а машина движется самостоятельно. При этом распор гусеничных тележек обеспечивается гидромеханическим узлом распора.
С помощью связанных гидромагистралями с буровой машиной энергоблока и пульта управления, размещенных в выработке, запускают на рабочий режим буровую машину, которая установлена на стартовой тележке таким образом, чтобы осуществить проходку скважины в заданном направлении. После забуривания агрегата в кровлю или стенку выработки и прохождения им нескольких метров с помощью автономного визирующего устройства, например лазерного источника света, установленного на машине, определяют отклонение направления (степень «рысканья») движения буровой машины от заданного и возвращают ее на пуско-доставочную площадку, где путем подстраивания с помощью механизма изменения длины регулируемых рычагов и фиксаторов изменяют соотношение усилий прижима гусеничных тележек к стенкам скважины таким образом, чтобы компенсировать величину указанного выше отклонения направления движения. После этого вторично осуществляют забуривание в проходимый массив (скважину), но уже в новом месте и определяют величину нового отклонения направления движения. Повторяя указанную процедуру забуривания несколько раз, добиваются такой величины отклонения, которая обеспечила бы требуемую точность направления движения. В этом положении механизмы изменения длины рычагов 6 фиксируются, и это полученное и зафиксированное соотношение размеров рычагов шарнирно-рычажных механизмов, расположенных со стороны приводного исполнительного органа, становится «точкой отсчета» для изменения направления движения буровой машины.
Учитывая, что первичные отклонения направления движения обусловлены, в основном, неточностями изготовления и практической невозможностью абсолютно равного разложения вектора силы, сформированного узлом распора как по величине, так и по направлению, на три гусеничные тележки, один раз зафиксированное соотношение длин тяг нет необходимости изменять (вновь проводить юстировку), так как это соотношение скомпенсировало как неточности изготовления, так и разложения вектора силы.
При изменении горно-технических условий при проходке скважины, например при появлении пропластка горной породы с резко отличающимися физико-механическими свойствами или существенным увеличением, или уменьшением доли присечки кровли и почвы выработки, «точка отсчета» может измениться. В этом случае путем изменения режима в работе исполнительного органа и механизма подачи можно перераспределить усилия, воздействующие на машину таким образом, чтобы стабилизировать положение «точки отсчета», т.е. при проходке пропластов, геологических нарушений и т.п. не будет необходимости вновь перенастраивать регулируемые рычаги шарнирно-рычажных механизмов. Поэтому при изменении горно-технических условий, используя дистанционно-переключаемый регулятор режимов бурения, стабилизируют исходное состояние шарнирно-рычажных механизмов, т.е. положение «точки отсчета.
Предлагаемая конструкция буровой машины позволяет повысить точность траектории проходки скважины.
| название | год | авторы | номер документа |
|---|---|---|---|
| БУРОВАЯ МАШИНА ДЛЯ ПРОВЕДЕНИЯ ВОССТАЮЩИХ СКВАЖИН | 2000 |
|
RU2169840C1 |
| Сбоечно-буровая машина | 1988 |
|
SU1680974A1 |
| УСТРОЙСТВО ДЛЯ БУРЕНИЯ | 2000 |
|
RU2173759C1 |
| Проходческий комбайн для проходки восстающих горных выработок по углю | 1959 |
|
SU125786A1 |
| ПРОХОДЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2184846C2 |
| УСТРОЙСТВО ДЛЯ ПОДЗЕМНОЙ РАЗРАБОТКИ МОЩНЫХ И КРУТОПАДАЮЩИХ ЗАЛЕЖЕЙ КАЛИЙНЫХ РУД | 2013 |
|
RU2540736C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ КРОВЛЕЙ И ПОДГОТОВКИ К ВЫЕМКЕ МОЩНЫХ ПЛАСТОВ ПОЛЕЗНОГО ИСКОПАЕМОГО С ВЫПУСКОМ ЕГО ИЗ ПОДКРОВЕЛЬНОЙ ТОЛЩИ | 2002 |
|
RU2253017C2 |
| ШАРНИРНО-СОЧЛЕНЕННАЯ МАШИНА | 1991 |
|
RU2015053C1 |
| ПРОХОДЧЕСКИЙ РОБОТ И ТРАНСПОРТИРУЮЩИЙ МЕХАНИЗМ ПРОХОДЧЕСКОГО РОБОТА | 1988 |
|
SU1549153A1 |
| Устройство для разбуривания скважин | 1986 |
|
SU1323725A1 |
Изобретение относится к буровым машинам для направленного проведения восстающих скважин по породам различной крепости. Задачей изобретения является повышение степени управляемости буровой машины за счет повышения точности ее движения по заданной траектории оси скважины. Буровая машина для проведения восстающих скважин включает приводной исполнительный орган с породоразрушающими инструментами, приводные гусеничные тележки и узел их распора, установленный с возможностью взаимодействия с шарнирно-рычажными механизмами, связанными с гусеничными тележками и содержащими устройства отклонения гусеничных тележек в виде регулируемых тяг с механизмами изменения их длины. Буровая машина снабжена реактивными тягами, соединенными с узлом распора гусеничных тележек и с одним из рычагов шарнирно-рычажных механизмов, расположенных со стороны, противоположной приводному исполнительному органу. В качестве регулируемых тяг устройств отклонения гусеничных тележек выполнен один из рычагов шарнирно-рычажных механизмов, расположенных со стороны приводного исполнительного органа. Механизмы изменения длины регулируемых рычагов выполнены с фиксаторами этого изменения. Приводной исполнительный орган может быть выполнен сменным: планетарно-динамическим или планетарным органом резания. 2 з.п. ф-лы, 1 ил.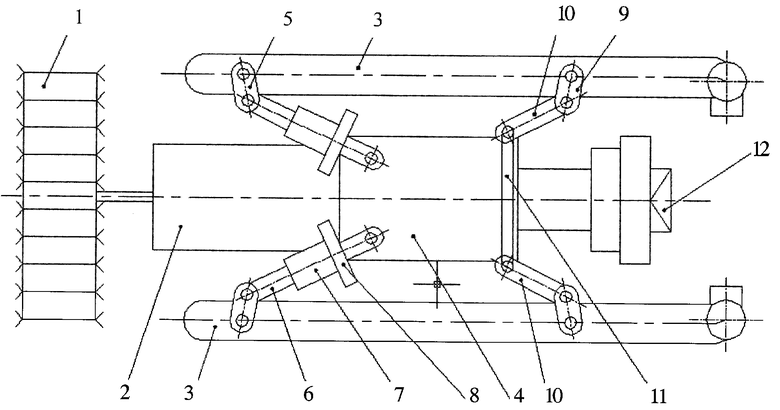
1. Буровая машина для проведения восстающих скважин, включающая приводной исполнительный орган с породоразрушающими инструментами, приводные гусеничные тележки и узел их распора, установленный с возможностью взаимодействия с шарнирно-рычажными механизмами, связанными с гусеничными тележками и содержащими устройства отклонения гусеничных тележек в виде регулируемых тяг с механизмами изменения их длины, отличающаяся тем, что она снабжена реактивными тягами, соединенными с узлом распора гусеничных тележек и с одним из рычагов шарнирно-рычажных механизмов, расположенных со стороны, противоположной приводному исполнительному органу, при этом в качестве регулируемых тяг устройств отклонения гусеничных тележек выполнен один из рычагов шарнирно-рычажных механизмов, расположенных со стороны приводного исполнительного органа, выполненный регулируемым, а механизмы изменения длины регулируемых рычагов выполнены с фиксаторами этого изменения.
2. Буровая машина для проведения восстающих скважин по п.1, отличающаяся тем, что приводной исполнительный орган может быть выполнен сменным.
3. Буровая машина для проведения восстающих скважин по п.1, отличающаяся тем, что приводной исполнительный орган может быть планетарно-динамическим или планетарным органом резания.
| БУРОВАЯ МАШИНА ДЛЯ ПРОВЕДЕНИЯ ВОССТАЮЩИХ СКВАЖИН | 2000 |
|
RU2169840C1 |
| Сбоечно-буровая машина | 1952 |
|
SU101918A1 |
| Устройство для проходки восстающих скважин по углю с применением сбоечно-буровой машины | 1961 |
|
SU150079A1 |
| Сбоечно-буровая машина | 1988 |
|
SU1680974A1 |
| ПРОХОДЧЕСКИЙ КОМБАЙН С.Л.ЗАГОРСКОГО | 1995 |
|
RU2093682C1 |
| US 3604754 A, 14.09.1971. | |||

