Изобретение относится к системам автоматического управления и регулирования, в частности, к приводу горизонтального наведения стабилизатора вооружения боевой машины поддержки танков (БМПТ-объект 199, БМПТ-172).
Известен стабилизатор танкового вооружения 2Э42-4, привод горизонтального наведения (ГН) которого выполнен по схеме электрической принципиальной БС1.370.012 Э3 и описан в БС1.370.012ТО, ТУ. Привод ГН данного стабилизатора принят за прототип.
(См. также книгу В.В. Корнеева, М.И. Кузнецова и др. «Основы автоматики и танковые автоматические системы», М., Мин-во обороны, 1976 г., издание Академии бронетанковых войск имени маршала Малиновского Р.Я.).
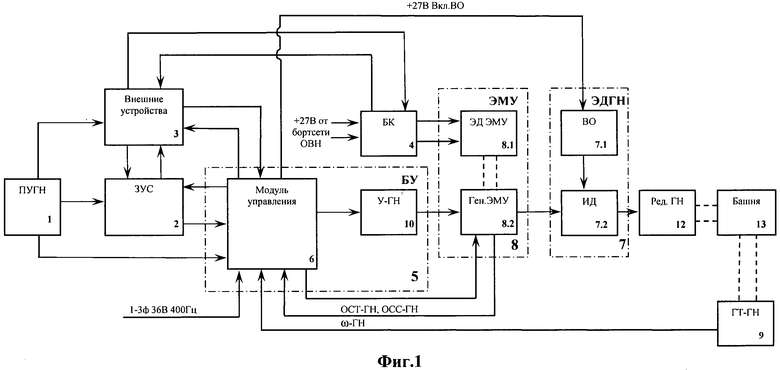
Структурная схема привода ГН стабилизатора- прототипа приведена на фиг.1.
Привод ГН стабилизатора-прототипа представляет собой электропривод ГН, выполненный на базе электромашинного усилителя (ЭМУ) 8, состоящего из электродвигателя (ЭД ЭМУ) 8.1 и генератора (Ген.ЭМУ) 8.2, работающего в паре с исполнительным двигателем постоянного тока (ИД) 7.2 электродвигателя (ЭДГН) 7, включает установленную на башне 13 пушку с закрепленным на ней датчиком абсолютной угловой скорости по ГН (ГТ-ГН) 9, редуктор ГН (Ред.ГН) 12, механически связанный с башней 13 и электродвигателем ГН (ЭДГН) 7, пульт управления по ГН (ГГУГН) 1, задающее устройство стабилизации (ЗУС) 2 с датчиком положения независимо стабилизированного в пространстве инерциального объекта по ГН, электрически связанного с пультом управления по ГН (ПУГН) 1, внешние устройства 3, электрически связанные с задающим устройством стабилизации (ЗУС) 2 с датчиком положения независимо стабилизированного в пространстве инерциального объекта по ГН и пультом управления по ГН (ПУГН) 1, блок управления (БУ) 5, электрически связанный через собственный аналоговый модуль управления 6 с собственным усилителем ГН (У-ГН) 10 и с датчиком абсолютной угловой скорости по ГН (ГТ-ГН) 9, а также электрически связанный через внешние устройства 3 с блоком коммутации (БК) 4 привода ГН. В состав электродвигателя (ЭДГН) 7 также входит вентилятор обдува (ВО) 7.1, служащий для обеспечения заданного теплового режима исполнительного двигателя постоянного тока (ИД) 7.2 электродвигателя (ЭДГН) 7 и электрически связанный с аналоговым модулем управления 6 блока управления (БУ) 5, стабилизатора.
Электропривод ГН стабилизатора, принятого за прототип, представляют собой автономный привод, обеспечивающий наведение и стабилизацию основного вооружения танка в плоскости ГН по сигналам, поступающим с задающего устройства стабилизации (ЗУС) 2 и датчика абсолютной угловой скорости (ГТ-ГН) 9.
Принципы работы электропривода ГН в режиме стабилизации и стабилизированного наведения во многом схожи. Электропривод ГН представляет собой систему автоматического регулирования, работа которой основана на принципе отработки рассогласования (ошибки), т.е. на сравнении действительного значения регулируемого параметра с его заданным значением. Рассмотрим в отдельности режимы работы электропривода ГН.
Режим стабилизации по ГН - режим стабилизация пушки по ГН осуществляется относительно сигнала датчика положения зеркала по ГН (ЗУС) 2, имеющего независимую стабилизацию зеркала (линии визирования) в плоскости ГН, что обеспечивается гиростабилизатором (ЗУС) 2.
При движении танка по пересеченной местности на башню 13 (пушку) действуют внешние возмущения в виде колебаний корпуса танка, трения в погоне башни 13, а также возмущения, обусловленные неуравновешенностью башни 13 относительно оси вращения.
Эти возмущения вызывают отклонение башни 13 (пушки) от заданного сигналом датчика положения (угла) зеркала по ГН (ЗУС) 2 направления. Угол между заданным и действительным направлением башни 13 (пушки) в горизонтальной плоскости в этом случае определяет ошибку стабилизации привода ГН. Сигнал, пропорциональный ошибке стабилизации, отрабатывается приводом ГН стабилизатора, поворачивающим башню 13 (пушку) в сторону уменьшения ошибки по ГН.
Полученная таким образом ошибка стабилизации привода ГН обрабатывается аналоговым модулем управления 6 блока управления (БУ) 5 стабилизатора, одни сигналы с которого через внешние устройства 3 управляют включением блока коммутации (БК) 4 привода ГН, запускающего приводной двигатель (ЭД ЭМУ) 8.1 электромашинного усилителя (ЭМУ) 8, а другие сигналы через усилитель (У-ГН) 10 поступают на обмотки управления генератора (Ген.ЭМУ) 8.2, формируя в них разность токов, в соответствии с величиной и направлением (знаком) которых (Ген.ЭМУ) 8.2 вырабатывает напряжение, под действием которого исполнительный электродвигатель (ИД) 7.2 электродвигателя (ЭДГН) 7 через редуктор (Ред.ГН) 12 поворачивает башню 13 (пушку) танка в направлении уменьшения рассогласования между заданным значением сигнала с датчика положения (угла) зеркала по ГН (ЗУС) 2 и истинным положением башни 13 (пушки) в горизонтальной плоскости.
Для повышения устойчивости привода ГН и как следствие получения заданной ошибки стабилизации в контур управления приводом ГН стабилизатора введены обратные связи, обрабатываемые аналоговым модулем управления 6 блока управления (БУ) 5:
- обратная связь по току ОСТ-ГН исполнительного двигателя (ИД) 7.2 электродвигателя (ЭДГН) 7, вырабатываемая (ЭМУ) 8;
- обратная связь по скорости ОСС-ГН вращения вала исполнительного двигателя (ИД) 7.2 электродвигателя (ЭДГН) 7, вырабатываемая (ЭМУ) 8;
- обратная связь по абсолютной угловой скорости ω-ГН башни 13 (пушки) в плоскости ГН, формируемая датчиком абсолютной угловой скорости по ГН (ГТ-ГН) 9.
Для обеспечения заданного теплового режима исполнительного двигателя (ИД) 7.2 в разных условиях его работы в состав электродвигателя (ЭДГН) 7 введен вентилятор обдува (ВО) 7.1.
Режим стабилизированного наведения по ГН - режим стабилизированного наведения башни 13 (пушки) по ГН осуществляется также по сигналу с датчика положения (угла) зеркала по ГН (ЗУС) 2. При обнаружении цели наводчик пультом управления (ПУГН) 1 наводит стабилизированную в плоскости ГН линию визирования (прицельную марку) (ЗУС) 2 на цель в плоскости ГН. Сигнал с датчика положения зеркала по ГН (ЗУС) 2, пропорциональный ошибке по ГН, поступает на вход аналогового модуля управления 6 блока управления (БУ) 5, где происходит его преобразование аналогично режиму стабилизации по ГН, описанному выше. Исполнительный электродвигатель (ИД) 7.2 электродвигателя (ЭДГН) 7 через редуктор (Ред.ГН) 12 поворачивает башню 13 (пушку) танка в сторону уменьшения ошибки по ГН, аналогично рассмотренному выше режиму стабилизации в плоскости ГН.
Для уменьшения скоростной ошибки при наведении, сигнал с пульта управления (ПУГН) 1 поступает на вход аналогового модуля управления 6 блока управления (БУ) 5 стабилизатора вооружения.
Другие сигналы с внешних устройств 3, связанные с (ЗУС) 2, (ПУГН) 1, блоком коммутации (БК) 4, представляют собой сигналы с комплекса приборов и узлов, входящих как в стабилизатор, так и в оборудование танка в целом.
Описанной выше конструкции электропривода ГН стабилизатора-прототипа присущи следующие недостатки:
- электромашинный электропривод ГН стабилизатора-прототипа не позволяет добиться высоких показателей по точности стабилизации;
- электромашинный электропривод ГН стабилизатора-прототипа обеспечивает максимальную скорость переброса и отработки не более 24°/с, что недостаточно при работе в режиме целеуказания и при движении танка по пересеченной местности с резкими маневрированиями его шасси;
- электромашинный электропривод ГН стабилизатора-прототипа имеет малый ресурс и сложен в обслуживании, из-за наличия как в конструкции ЭМУ, так и в конструкции ЭДГН и вентиляторов обдува коллекторов со щеточными узлами, что требует дополнительного периодического их обслуживания с заменой износившихся щеток;
- электромашинный электропривод ГН стабилизатора при работе вызывает искрение в зоне коллекторного узла ЭМУ, ЭДГН и ВО, что при определенной боевой ситуации может привести к пожару внутри танка;
- электромашинный электропривод ГН стабилизатора не отвечает современным требованиям по соотношению массогабаритных характеристик электропривода и его полезной мощности;
- конструкция (ЭМУ) и ЭДГН не герметичны, что тоже накладывает ограничения при их эксплуатации;
- повышенный шум в боевом отделении от вращающихся частей электродвигателя и генератора, входящих в состав ЭМУ, а также вентилятора обдува исполнительного двигателя ИД электродвигателя ЭДГН;
- модуль управления, входящий в состав блока управления прототипа, обменивается данными с внешними устройствами 3 и (ЗУС) 2 по аналоговым цепям, что отрицательно сказывается на помехозащищенности передаваемых сигналов и, в конечном счете, влияет на качество сигнала ошибки стабилизации;
- структура модуля управления прототипа реализована при помощи аналоговой схемотехники - данный подход является морально устаревшим и требует пересмотра в пользу цифровых технологий. Также аналоговый модуль управления не позволяет проводить техническую диагностику электропривода ГН стабилизатора, что отрицательно сказывается при настройке и контроле электропривода ГН в боевых условиях, повышая тем самым трудоемкость его обслуживания;
- в конструкции блока управления стабилизатора-прототипа отсутствует защита (блокировка привода ГН) при пропадании переменного напряжения питания 36 B 400 Гц, что при эксплуатации может приводить к самопроизвольному (несанкционированному) наведению (перебросу) башни в плоскости ГН.
Целями предлагаемого изобретения является:
- повышение точности стабилизации электропривода ГН стабилизатора;
- повышение максимальной скорости переброса и отработки электропривода ГН стабилизатора до не менее 40°/с;
- повышение надежности и ресурса работы электропривода ГН стабилизатора, а с ним и объекта военного назначения (далее по тексту - ОВН);
- снижение пожароопасности внутри ОВН, связанной с работой электропривода ГН стабилизатора;
- повышение удельной мощности электропривода ГН стабилизатора;
- исключение выхода электропривода ГН стабилизатора из строя после затопления корпуса (шасси) ОВН;
- повышение эргономических показателей электропривода ГН стабилизатора;
- повышение качества сигнала ошибки электропривода ГН стабилизатора;
- повышение удобства и уменьшение трудоемкости технического обслуживания электропривода ГН стабилизатора с возможностью оперативной оценки его параметров;
- введение блокировок цепей управления электроприводом ГН стабилизатора при пропадании питания переменным напряжением 36 B 400 Гц.
Указанные цели достигаются тем, что в известный привод горизонтального наведения стабилизатора вооружения ОВН, содержащий башню (пушку) с закрепленным на ней датчиком абсолютной угловой скорости по ГН, редуктор ГН, механически связанный с башней и электродвигателем ГН, электродвигатель ГН, пульт управления по ГН, задающее устройство стабилизации с датчиком положения независимо стабилизированного в пространстве инерциального объекта по ГН, электрически связанное с пультом управления по ГН, внешние устройства, электрически связанные с задающим устройством стабилизации с датчиком положения независимо стабилизированного в пространстве инерциального объекта по ГН и пультом управления по ГН, блок управления, электрически связанный через собственный модуль управления с собственным усилителем ГН и с датчиком абсолютной угловой скорости по ГН, согласно изобретению дополнительно введены:
- преобразователь напряжения привода ГН;
- усилитель мощности привода ГН;
- контрольно-проверочная аппаратура,
кроме того, в блок управления дополнительно введены:
- модуль цифрового обмена;
- модуль диагностики и настройки;
- блок защит,
при этом модуль цифрового обмена блока управления электрически связан через цифровые каналы обмена с внешними устройствами, модулем диагностики и настройки, блоком защит и входом модуля управления, связанным в свою очередь через цифровые каналы обмена с модулем диагностики и настройки и блоком защит, электрически связанным в свою очередь с переменным напряжением питания ОВН,
контрольно-проверочная аппаратура через цифровой канал обмена электрически связана с модулем диагностики и настройки,
преобразователь напряжения привода ГН электрически связан с бортсетью ОВН и усилителем мощности привода ГН причем,
модуль управления и усилитель ГН блока управления электрически связаны с усилителем мощности привода ГН, вращающим вал синхронного бесколлекторного электродвигателя ГН закрытого типа, который через редуктор ГН поворачивает башню с пушкой в направлении, заданном задающим устройством стабилизации с датчиком положения независимо стабилизированного в пространстве инерциального объекта по ГН.
Сопоставительный анализ с прототипом показывает, что заявляемый привод горизонтального наведения стабилизатора вооружения ОВН отличается наличием новых элементов, а именно:
- преобразователь напряжения привода ГН;
- усилитель мощности привода ГН;
- контрольно-проверочная аппаратура;
- модуль цифрового обмена;
- модуль диагностики и настройки;
- блок защит;
и их связями с другими элементами привода горизонтального наведения стабилизатора и ОВН.
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы достаточно хорошо известны в технике, но их введение в указанной связи в привод горизонтального наведения стабилизатора вооружения позволяет:
- повысить точность стабилизации электропривода ГН за счет применения нового (с большей полосой пропускания) электропривода ГН, состоящего из усилителя мощности, формирующего управление для синхронного бесколлекторного электродвигателя ГН закрытого типа с векторным управлением, что в сумме с новым качеством обратных связей по скорости вращения вала ЭД и обратной связи по току ЭД, формируемых усилителем мощности привода ГН, позволяет улучшить добротность контура управления электропривода ГН. В сумме данные мероприятия позволяют повысить точность стабилизации электропривода ГН, не менее чем на (15-20)%;
- повысить максимальную скорость переброса и отработки электропривода ГН стабилизатора до величины не менее 40% за счет применения высоковольтного преобразователя напряжения бортсети ОВН, работающего совместно с новым усилителем мощности и синхронным бесколлекторным электродвигателем ГН закрытого типа с векторным управлением;
- повысить надежность стабилизатора за счет замены устаревшего электромашинного электропривода ГН на современный электропривод с векторным управлением исполнительным электродвигателем ГН, позволяющий исключить все недостатки электромашинного электропривода ГН стабилизатора-прототипа;
- исключить возможность возникновения пожара внутри ОВН за счет применения в электроприводе ГН стабилизатора преобразователя напряжения, усилителя мощности и бесколлекторного электродвигателя ГН закрытого типа, конструкция которых исключает наличие искрения;
- повысить в 1,5 раза удельную мощность электропривода ГН стабилизатора за счет снижения массы преобразователя напряжения, усилителя мощности по сравнению с ЭМУ и электродвигателя ГН электропривода ГН стабилизатора-прототипа;
- исключить выход электропривода ГН стабилизатора из строя после затопления корпуса (шасси) ОВН за счет применения электродвигателя ГН закрытого типа и конструкции преобразователя напряжения и усилителя мощности, образующих закрытый герметичный объем;
- повысить эргономические показатели электропривода ГН стабилизатора за счет исключения из конструкции предлагаемого электропривода ГН стабилизатора постоянно вращающихся частей электродвигателя и генератора, ранее входящих в состав ЭМУ, а также вентилятора обдува исполнительного двигателя ИД электродвигателя ЭДГН;
- повысить качество передачи и обработки сигнала ошибки электропривода ГН стабилизатора за счет введения в структуру цифровых информационных каналов обмена;
- повысить удобство и уменьшить трудоемкость технического обслуживания электропривода ГН стабилизатора за счет введения в структуру блока управления модуля настройки и диагностики, имеющего цифровой канал информационного обмена, используемый при подключении внешней контрольно-проверочной аппаратуры. В условиях изготовления и эксплуатации электропривода ГН стабилизатора контрольно-проверочная аппаратура позволяет оперативно оценивать состояние электропривода ГН и проводить при необходимости его настройку;
- исключить самопроизвольное (несанкционированное) наведение или переброс башни в плоскости ГН из-за пропадания переменного напряжения питания 36 B, 400 Гц или отсутствии информационного обмена между модулем цифрового обмена блока управления с внешними устройствами, транслирующими сигналы от задающего устройства стабилизации и пульта управления по ГН. Поставленная задача решается за счет применения в составе блока управления электропривода ГН стабилизатора блока защит, анализирующего наличие переменного напряжения питания 36 B, 400 Гц и наличие обмена с внешними устройствами. В случае несоблюдения заданных в блоке защит условий происходит блокировка электропривода ГН стабилизатора.
На фиг.1 приведена структурная схема электропривода ГН стабилизатора-прототипа 2Э42-4 объекта 188; на фиг.2 приведена заявляемая структурная схема электропривода ГН стабилизатора вооружения.
Сокращения, принятые в тексте и на фиг.1, и фиг.2:
БК - блок коммутации;
БМПТ - боевая машина поддержки танков;
БУ - блок управления;
ВО - вентилятор обдува;
Ген.ЭМУ - генератор электромашинного усилителя;
ГН - горизонтальное наведение;
ГТ-ГН - датчик абсолютной угловой скорости по ГН;
ЗУС - задающее устройство стабилизации с датчиком положения независимо стабилизированного в пространстве инерциального объекта по ГН;
ИД - исполнительный двигатель;
КПА - контрольно-проверочная аппаратура;
ОВН - объект военного назначения;
ОСС-ГН - обратная связь по скорости ЭДГН;
ОСТ-ВН - обратная связь по току ЭДГН;
ПУГН - пульт управления по ГН;
ПН - преобразователь напряжения привода ГН;
Ред.ГН - редуктор привода ГН;
У-ГН - усилитель ГН блока управления;
УМ - усилитель мощности привода ГН;
ЭДГН - электродвигатель привода ГН;
ЭМУ - электромашинный усилитель;
ЭД ЭМУ - приводной электродвигатель генератора ЭМУ;
ω-ГН - сигнал абсолютной угловой скорости по ГН.
Заявляемый привод горизонтального наведения стабилизатора вооружения ОВН (фиг.2) содержит пульт управления по ГН (ПУГН) 1, задающее устройство стабилизации (ЗУС) 2 с датчиком положения независимо стабилизированного в пространстве инерциального объекта по ГН, электрически связанное с пультом управления по ГН (ПУГН) 1, внешние устройства 3, электрически связанные с задающим устройством стабилизации (ЗУС) 2 с датчиком положения независимо стабилизированного в пространстве инерциального объекта по ГН и пультом управления по ГН (ПУГН) 1, причем внешние устройства 3 через информационный канал обмена электрически связаны с модулем цифрового обмена 4 блока управления (БУ) 5, а модуль цифрового обмена 4 электрически связан через цифровые каналы обмена с входом модуля управления 6 блока управления (БУ) 5, выполненного с возможностью обработки сигнала ошибки привода ГН и сигнала угловой скорости цели по ГН с последующим суммированием с сигналами отрицательных обратных связей по скорости и току (ЭДГН) 7, формируемых усилителем мощности (УМ) 8, и сигналом абсолютной угловой скорости по ГН, получаемого от датчика абсолютной угловой скорости по ГН (ГТ-ГН) 9, причем модуль управления 6 и усилитель ГН (У-ГН) 10 блока управления (БУ) 5, электрически связаны с усилителем мощности привода ГН (УМ) 8, который в свою очередь электрически связан с преобразователем напряжения привода ГН (ПН) 11, электрически связанным с бортсетью объекта военного назначения (ОВН), и вращает вал синхронного бесколлекторного электродвигателя ГН закрытого типа (ЭД ГН) 7.
Электродвигатель ГН закрытого типа (ЭД ГН) 7, как и в приводе ГН стабилизатора-прототипа, через редуктор ГН (Ред. ГН) 12 поворачивает башню 13 с пушкой в направлении, заданном задающим устройством стабилизации (ЗУС) 2 с датчиком положения независимо стабилизированного в пространстве инерциального объекта по ГН. Дополнительно в блок управления (БУ) 5 привода горизонтального наведения заявляемого стабилизатора вооружения ОВН введен модуль диагностики и настройки 14, через цифровые каналы обмена электрически связанный с подключаемой при настройке и диагностике контрольно-проверочной аппаратурой (КПА) 15, а также в блок управления (БУ) 5 введен блок защит 16, электрически связанный в свою очередь с переменным напряжением питания объекта военного назначения (ОВН). Причем модуль диагностики и настройки 14 и блок защит 16 связанны через цифровые каналы обмена с входами модуля управления 6, и с модулем цифрового обмена 4 блока управления (БУ) 5.
Привод ГН стабилизатора вооружения ОВН представляет собой автономно работающий привод наведения и стабилизации башни (пушки) в плоскости ГН.
Датчик положения (угла) независимо стабилизированного инерциального объекта по ГН задающего устройства стабилизации, датчик абсолютной угловой скорости по ГН, пульт управления по ГН, усилитель мощности привода ГН башни формируют на соответствующих входах блока управления сигнал ошибки по ГН, сигнал по абсолютной угловой скорости башни (пушки) по ГН, сигнал угловой скорости цели по ГН, сигналы обратных связей по скорости вращения вала и току исполнительного электродвигателя привода ГН.
Привод ГН содержит пульт управления (ПУГН) 1, задающее устройство стабилизации (ЗУС) 2 с датчиком положения (угла) независимо стабилизированного в пространстве инерциального объекта по ГН, электрически связанное соответственно с внешними устройствами 3 и с пультом управления (ПУГН) 1, выход с которого в свою очередь связан с внешними устройствами 3, выход с которых через информационный канал обмена соединен с входом модуля цифрового обмена 4 блока управления (БУ) 5.
Полученные и обработанные модулем цифрового обмена 4 сигнал ошибки привода ГН и сигнал угловой скорости цели по ГН (формируется внешними устройствами 3 при наведении вооружения на цель по ГН) поступают на вход цифрового модуля управления 6.
Полученные цифровым модулем управления 6 сигнал ошибки привода ГН и сигнал угловой скорости цели по ГН обрабатываются в нем по заданному алгоритму с последующим суммированием с сигналами отрицательных обратных связей по скорости и току (ЭДГН) 7, формируемых усилителем мощности (УМ) 8, и сигналом абсолютной угловой скорости по ГН, получаемого от датчика абсолютной угловой скорости по ГН (ГТ-ГН) 9. Полученный таким образом на выходе модуля управления 6 сигнал представляет собой непосредственно слаботочный сигнал управления для привода ГН.
Слаботочный сигнал управления привода ГН с выхода цифрового модуля управления 6 поступает на вход усилителя ГН (У-ГН) 10, где усиливается и подается на вход управления усилителя мощности (УМ) 8, электрически связанного с высоковольтным преобразователем напряжения (ПН) 11, запитанного от бортсети объекта ОВН.
Силовой сигнал управления с выхода усилителя мощности (УМ) 8 привода ГН вращает выходной вал электрически связанного с ним исполнительного синхронного электродвигателя закрытого типа (ЭДГН) 7, поворачивающего через редуктор (Ред.ГН) 12 башню 13 (пушку) ОВН в направлении, заданном задающим устройством стабилизации (ЗУС) 2 с датчиком положения (угла) независимо стабилизированного в пространстве инерциального объекта по ГН.
Для настройки электропривода ГН стабилизатора вооружения и его диагностики как в составе ОВН, так и при его изготовлении в блок управления (БУ) 5 введен модуль диагностики и настройки 14, работающий совместно с модулем цифрового обмена 4, цифровым модулем управления 6 и через цифровые каналы обмена с подключаемой при настройке и диагностике контрольно-проверочной аппаратурой (КПА) 15.
Для исключения аварийных ситуаций, возникающих при пропадании переменного напряжения питания 36 B 400 Гц ОВН или при обрыве связи по информационному каналу обмена между внешними устройствами 3 и модулем цифрового обмена 4, в блок управления (БУ) 5 введен блок защит 16. Блок защит 16 работает совместно с модулем цифрового обмена 4, цифровым модулем управления 6. Аппаратная и программная часть блока защит 16 позволяет определять наличие питающего переменного напряжения 36 B 400 Гц ОВН и наличие обрыва связи по цифровому каналу информационного взаимодействия с внешними устройствами 3.
Большинство новых элементов привода горизонтального наведения стабилизатора вооружения удобнее реализовать как часть программного обеспечения блока управления, при этом обработка получаемых блоком данных будет осуществляться контроллером, состоящим из следующих модулей:
- аналого-цифрового преобразователя;
- цифроаналогового преобразователя;
- дискретного ввода-вывода;
- цифрового обмена, являющегося портами контроллера.
Цифровой модуль управления может быть выполнен в виде подпрограмм управления выходами цифроаналогового преобразователя ГН и дискретными выходами контроллера. При этом корректирующие звенья электропривода ГН, используемые цифровым модулем управления, представляют собой цифровые фильтры 1-го и 2-го порядка, полученные билинейным преобразованием аналоговых прототипов, причем частота обработки полученных блоком управления данных и выдача им сигналов управления на усилитель мощности привода ГН будет определяться заданной частотой циклов обработки сигналов контроллером блока управления.
Устройства настройки и диагностики и блок защит представляют собой как встроенные в ОВН аппаратно программные средства, так и средства, подключаемые к контрольному разъему блока управления стабилизатора.
(См. книгу под редакцией Богнера Р. и Константинидиса А. «Введение в цифровую фильтрацию» пер. с англ. - М.: Мир, 1976).
Выходной усилитель ГН блока управления может быть выполнен по схеме, построенной на операционном усилителе, в обратную связь которого введен транзисторный каскад с токовым симметричным выходом.
(См. книгу Хоровиц П., Хилл У. «Искусство схемотехники», пер. с англ. - 4-е изд. перераб. и доп. - М.: Мир, 1993).
Заявляемый привод горизонтального наведения и стабилизации работает следующим образом.
Принцип действия электропривода горизонтального наведения ГН основан на том, что этот привод представляет собой систему автоматического регулирования, работа которой основана на принципе отработки рассогласования (ошибки), т.е. на сравнении действительного значения регулируемого параметра с его заданным значением. Направление в горизонтальной плоскости, которое требуется придать башне 13 (пушке), является заданным значением регулируемого параметра для электропривода ГН стабилизатора.
Режим стабилизации.
При движении ОВН по пересеченной местности на башню 13 (пушку) действуют внешние возмущения в виде колебаний корпуса ОВН, трения в погоне (опоре) башни, электродвигателе (ЭДГН) 7 привода ГН, а также возмущения, обусловленные неуравновешенностью башни 13 относительно оси вращения.
Эти возмущения вызывают отклонение башни 13 (пушки) от заданного задающим устройством стабилизации (ЗУС) 2 направления. Угол между заданным и действительным направлением башни 13 (пушки), в этом случае, определяет ошибку стабилизации электропривода ГН. Сигнал, пропорциональный ошибке стабилизации, через внешние устройства 3 поступает на вход модуля цифрового обмена 4, где отрабатывается по заданному алгоритму.
Далее, полученный цифровой сигнал ошибки (код) по ГН поступает на вход цифрового модуля управления 6, где фильтруются и суммируются с соответствующими сигналами отрицательных обратных связей, по абсолютной угловой скорости (ω-ГН) башни 13 (пушки) по ГН, формируемого по сигналу с датчика абсолютной угловой скорости (ГТ-ГН) 9, закрепленного на башне 13 (пушке), а также с сигналами отрицательных обратных связей по скорости вращения вала (ОСС-ГН) и току (ОСТ-ГН) исполнительного электродвигателя (ЭДГН) 7, формируемых усилителем мощности (УМ) 8 электропривода ГН.
Указанные сигналы обратных связей, как и в стабилизаторе-прототипе, позволяют повысить добротность и устойчивость электропривода ГН стабилизатора, тем самым, обеспечив требуемое качество управления электроприводом ГН, что в сумме с новыми цифровыми алгоритмами управления, реализованными в цифровом модуле управления 6 блока управления (БУ) 5, позволяет уменьшить ошибку стабилизации башни 13 (пушки) в плоскости ГН.
Таким образом, полученный и обработанный цифровым модулем управления 6 сигнал управления по ГН поступает на усилитель ГН 10 блока управления (БУ) 5, формирующий усиленный по току и напряжению сигнал управления для усилителя мощности (УМ) 8. Полученный сигнал управления по ГН преобразуются усилителем мощности (УМ) 8 в силовые сигналы для управления обмотками исполнительного электродвигателя (ЭДГН) 7. Для питания выходного транзисторного каскада управления (ЭДГН) 7 усилителя мощности (УМ) 8 используется высоковольтное напряжение, формируемое из напряжения бортсети ОВН статическим преобразователем напряжения (ПН) 11.
Воздействие силовых сигналов управления усилителя мощности (УМ) 8 на обмотки исполнительного электродвигателя (ЭДГН) 7, механически связанного с редуктором ГН (Ред.ГН) 12, приводит к вращению его вала и как следствие к вращению башни 13 (пушки) по ГН в сторону уменьшения ошибки стабилизации по ГН, тем самым удерживая направление башни 13 (пушки) на цель.
Режим стабилизированного наведения.
Стабилизированное наведение башни 13 (пушки) осуществляется также по сигналам задающего устройства стабилизации (ЗУС) 2, связанного электрически с пультом управления по ГН (ПУГН) 1 и внешними устройствами 3, формирующими соответственно по цифровому каналу обмена на входах внешних устройств 3 ошибку привода по ГН и сигнал угловой скорости цели.
Наводчик (оператор) ОВН пультом управления (ПУГН) 1 по ГН наводит стабилизированную линию визирования (прицельную марку) задающего устройства стабилизации (ЗУС) 2 на цель. Сигнал с датчика положения (угла) ГН задающего устройства стабилизации (ЗУС) 2, пропорциональный ошибке по ГН и скорости наведения линии визирования (прицельной марки), отрабатываются электроприводом ГН стабилизатора, поворачивающим башню 13 (пушку) в сторону уменьшения ошибки ГН, аналогично рассмотренному выше режиму стабилизации.
Приведенные технические преимущества, целесообразность и надежность электропривода ГН стабилизатора вооружения, реализованного по заявляемой структурной схеме, подтверждены государственными испытаниями образца стабилизатора Б07С142 в составе опытного изделия 199 на территории ФГУП «38 ЦНИИ МО РФ» г. Кубинка, а также серийным производством на ОАО «НПК «Уралвагонзавод» г. Н. Тагил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2013 |
|
RU2526292C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2015 |
|
RU2593931C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2016 |
|
RU2628038C2 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2014 |
|
RU2553712C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2013 |
|
RU2525148C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2018 |
|
RU2682086C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2018 |
|
RU2789421C1 |
| ПРИВОД ВЕРТИКАЛЬНОГО НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ | 2013 |
|
RU2530438C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2827861C1 |
| СИСТЕМА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2548941C1 |
Изобретение относится к системам автоматического управления и регулирования, в частности к приводам горизонтального наведения стабилизатора вооружения объекта военного назначения (ОВН) боевой машины поддержки танков. Технический результат - расширение функциональных возможностей. Для этого дополнительно введены преобразователь напряжения привода горизонтального наведения (ГН), усилитель мощности привода ГН и контрольно-проверочная аппаратура. При этом в блок управления дополнительно введены модуль цифрового обмена, блок защит, модуль диагностики и настройки. Модуль цифрового обмена блока управления электрически связан через цифровые каналы обмена с внешними устройствами, модулем диагностики и настройки, блоком защит и входом модуля управления, связанным через цифровые каналы обмена с модулем диагностики и настройки и блоком защит, электрически связанным с переменным напряжением питания объекта военного назначения, контрольно-проверочная аппаратура через цифровой канал обмена электрически связана с модулем диагностики и настройки, преобразователь напряжения привода ГН электрически связан с бортовой сетью ОВН и усилителем мощности привода ГН. Модуль управления и усилитель ГН блока управления электрически связаны с усилителем мощности привода ГН. 2 ил.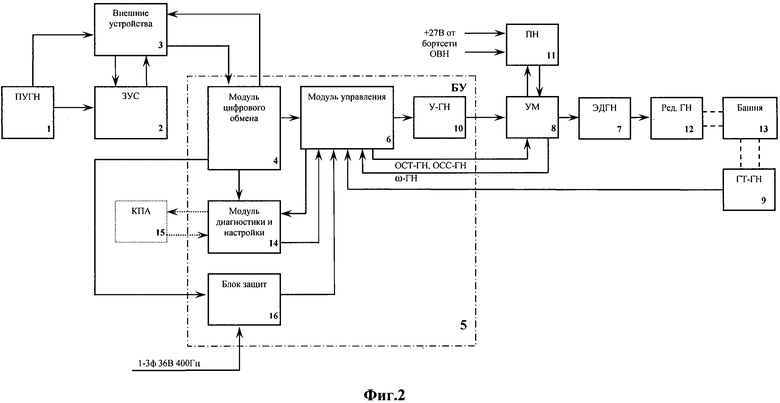
1. Привод горизонтального наведения и стабилизации, содержащий установленную на башне пушку с закрепленным на ней датчиком абсолютной угловой скорости по ГН, редуктор ГН, механически связанный с башней и электродвигателем ГН, электродвигатель ГН, пульт управления по ГН, задающее устройство стабилизации с датчиком положения независимо стабилизированного в пространстве инерциального объекта по ГН, электрически связанное с пультом управления по ГН, внешние устройства, электрически связанные с задающим устройством стабилизации с датчиком положения независимо стабилизированного в пространстве инерциального объекта по ГН и пультом управления по ГН, блок управления, электрически связанный через собственный модуль управления с собственным усилителем ГН и с датчиком абсолютной угловой скорости по ГН, отличающийся тем, что в него введены преобразователь напряжения привода ГН, усилитель мощности привода ГН, контрольно-проверочная аппаратура, кроме того, в блок управления дополнительно введены модуль цифрового обмена, модуль диагностики и настройки, блок защит, при этом модуль цифрового обмена блока управления электрически связан через цифровые каналы обмена с внешними устройствами, модулем диагностики и настройки, блоком защит и входом модуля управления, связанным в свою очередь через цифровые каналы обмена с модулем диагностики и настройки и блоком защит, электрически связанным в свою очередь с переменным напряжением питания объекта военного назначения, контрольно-проверочная аппаратура через цифровой канал обмена электрически связана с модулем диагностики и настройки, преобразователь напряжения привода ГН электрически связан с бортовой сетью объекта военного назначения и усилителем мощности привода ГН, модуль управления и усилитель ГН блока управления электрически связаны с усилителем мощности привода ГН, вращающим вал синхронного бесколлекторного электродвигателя ГН закрытого типа, который через редуктор ГН поворачивает башню с пушкой в направлении, заданном задающим устройством стабилизации с датчиком положения независимо стабилизированного в пространстве инерциального объекта по ГН.
| КОРНЕЕВ В.В., КУЗНЕЦОВ М.И., КУЗЬМИН Л.П., ПАВЛИЧУК К.И | |||
| Основы автоматики и танковые автоматические системы | |||
| -М.: МО СССР Академии бронетанковых войск им | |||
| маршала Р.Я.Малиновского | |||
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2009 |
|
RU2421679C1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2005 |
|
RU2308659C2 |
| ПРИВОД НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ ТАНКОВОГО ВООРУЖЕНИЯ | 1998 |
|
RU2138758C1 |
| Устройство для разработки и удаления грунта из кессона | 1938 |
|
SU60862A1 |

