Изобретение относится к способу и устройству, с помощью которых, используя отражение ультразвуковых импульсов от макроскопических частиц, таких как капли масла или песчинок в воде, получают информацию о распределении частиц в жидкости по размеру.
Европейская патентная заявка №0801305 описывает устройство для определения характеристик эмульсии. Устройство генерирует в жидкости ультразвуковые импульсы в виде луча. Отражение импульса от отдельной частицы в жидкости дает эхо-сигнал. Если частица находится в данном положении, то амплитуда сигнала отражения прямо пропорциональна размеру частицы. Следовательно, при измерении отражений последовательных импульсов от частиц различных размеров измеряются различные амплитуды.
Известное устройство создает гистограмму количества отражений с разной амплитудой. Гистограмма содержит информацию о распределении частиц по размеру, то есть, о концентрации частиц как функции размера частиц. В свою очередь, информация о распределении частиц по размеру позволяет определить, например, полную концентрацию частиц в жидкости.
Европейская патентная заявка № 0801305 описывает способ получения информации о размере по распределению амплитуд. Используется выражение для вероятности того, что возникают сигналы отражения с различными амплитудами. Это выражение связывает вероятность с распределением частиц по размеру. Если отражающие частицы всегда находятся в луче на одном месте, количество сигналов отражений, имеющих определенную амплитуду, будет пропорционально доле частиц, имеющих размер, дающий эту амплитуду.
Однако информация о распределении частиц по размеру искажается по амплитудам, поскольку амплитуда сигнала отражения частицы зависит не только от размеров частиц, но также от расположения частиц в луче. Чем дальше расположена отдаленная частица от центра луча, тем меньшую амплитуду дает она при отражении. Для учета этого эффекта используется выражение для вероятности того, что измерение сигнала отражения с конкретной амплитудой исказит распределение частиц по размеру по распределению амплитуд.
Используя способ наибольшего правдоподобия, оцениваются параметры распределения частиц по размеру, которые максимизируют выраженную таким образом вероятность реально измеренных количеств частиц. Таким образом, искажение ослабляется. На практике параметры выбираются таким образом, что минимизируется сумма квадратов разностей между измеренными количествами сигналов отражений с амплитудами в различных диапазонах амплитуд и предсказанными количествами. Такая сумма является показателем для вероятности комбинации измеренных сигналов отражений, но, конечно же, также могут быть использованы другие показатели для вероятности, такие как произведение вероятностей различных измеренных амплитуд.
Необходимое условие для используемых способов заключаются в том, что сигналы отражения отдельных частиц могут быть различимыми. Если сигналы отражений от нескольких частиц измеряются без их разделения, то часть сигналов отражений будет маскировано. Таким образом, отражение от большей частицы может сделать незаметным отражение от меньшей частицы, но отражение от меньшей частицы может также маскировать отражение от большей частицы, если большая частица будет находиться намного дальше от центра луча, чем меньшая частица.
Следовательно, данный способ дает достоверный результат только при довольно низкой концентрации. Максимальная допустимая концентрация может быть повышена путем минимизации объема, в котором выполняют измерение частиц без разделения, например, используя сфокусированный луч и маленькие временные окна, во время которых принимаются эхо-сигналы. Однако для применения таких способов существуют ограничения. По этой причине требование независимой наблюдаемости отдельной частицы ограничивает применение данного способа.
Цель данного изобретения состоит в том, чтобы сделать возможным использование ультразвуковых измерений для описания распределения частиц в жидкостях по размеру для более высоких концентраций.
Настоящее изобретение основано на том, что с помощью статистической модели возможна коррекция потери частиц, и, следовательно, для высоких концентраций также могут быть использованы известные технологии измерения.
Настоящее изобретение предоставляет способ по п.1 формулы изобретения. В способе параметры распределения частиц по размеру оцениваются с помощью способа максимального правдоподобия, используя выражение для вероятности измерения амплитуд сигналов отражений в виде двух множителей. Первый множитель выражает вероятность P0(A) измерения сигнала отражения, для которого сигнал отражения со значением A формирует часть, независимо от того, маскировано ли это значение сигналом отражения с более высоким значением. Первый множитель по существу соответствует выражению для вероятности, используемому в уровне техники.
Второй множитель, используемый в выражении согласно настоящему изобретению, содержит вероятность того, что отсутствует сигнал отражения с доминирующим значением характеристики, который будет маскировать измеряемую величину, формируя часть измерения сигнала отражения. Таким образом, эффект маскирования учитывается при оценке параметров. При этом оценка способом наибольшего правдоподобия учитывает как эффект искажения, так и эффект маскирования.
Эти и другие цели и преимущества настоящего изобретения будут описаны со ссылками на следующие чертежи:
Фиг.1 показывает устройство для определения характеристик жидкости.
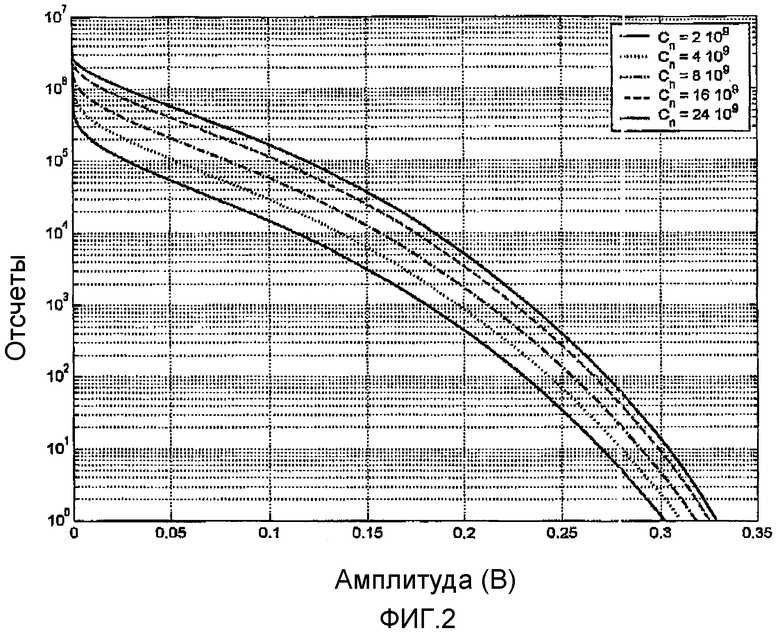
Фиг.2 показывает количество сигналов отражений с различными амплитудами.
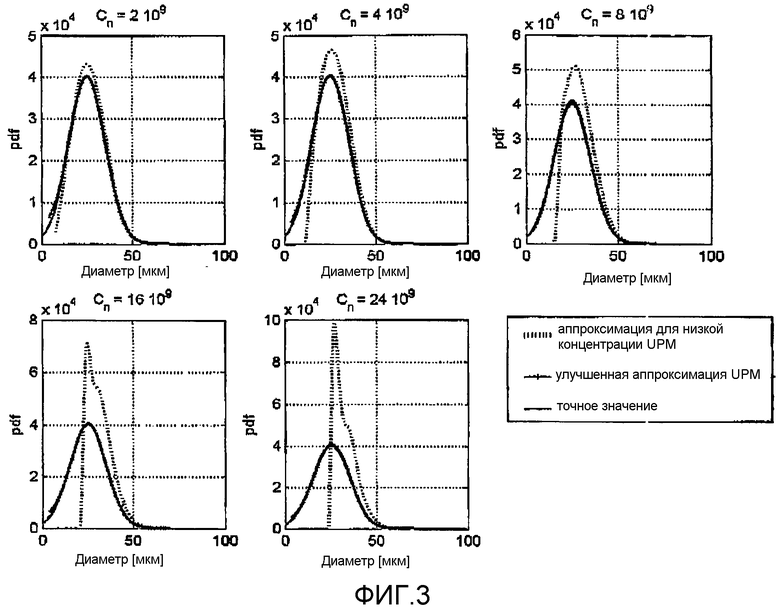
Фиг.3 показывает восстановленное распределение частиц по размеру.
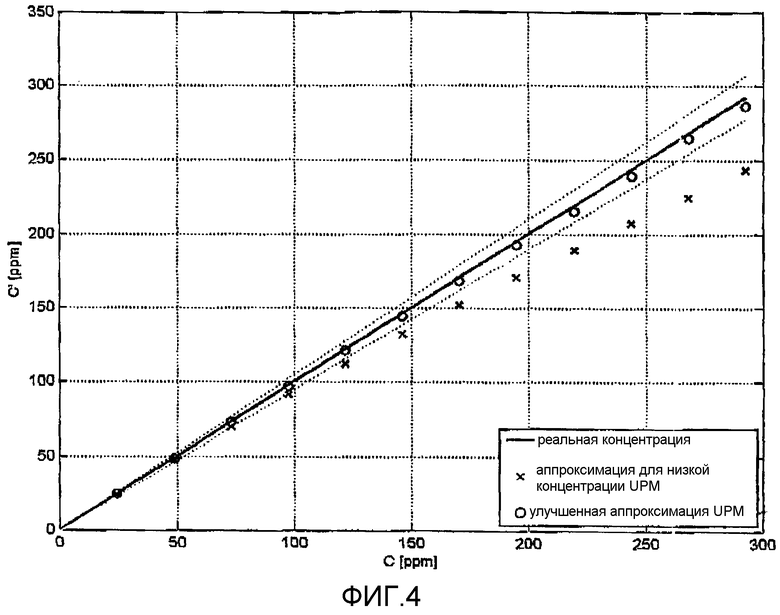
Фиг.4 показывает вычисленную концентрацию.
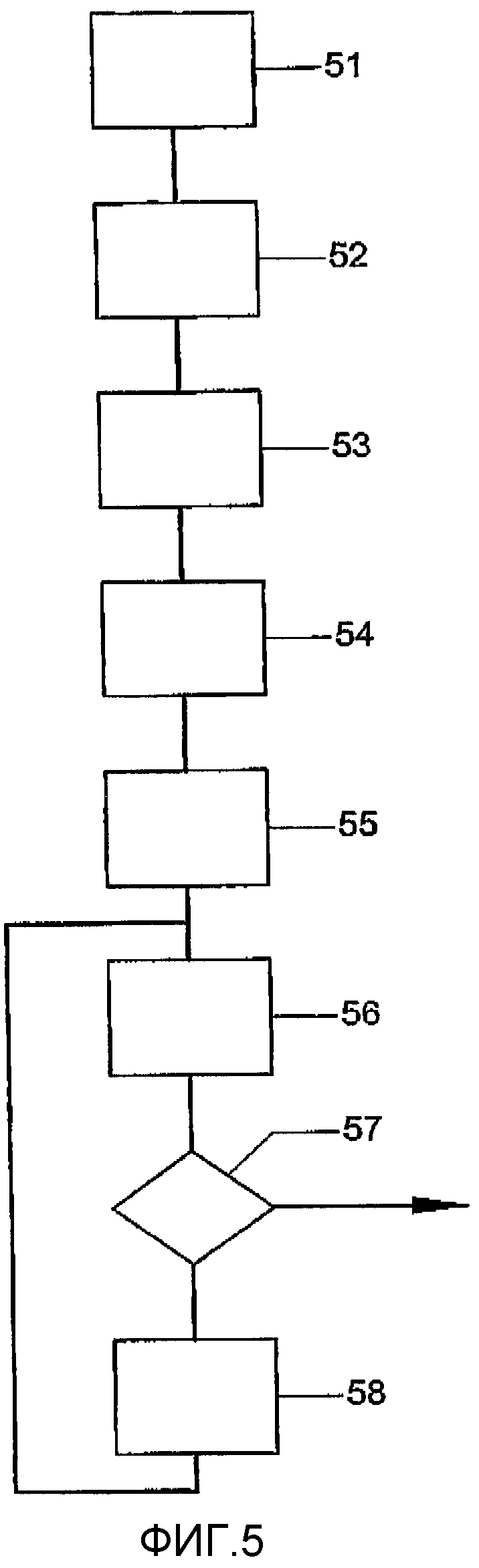
Фиг.5 показывает блок-схему последовательности операций способа оценки параметров распределения частиц по размеру.
На Фиг.1 показано устройство для определения характеристик жидкости. Устройство содержит канал 11 с жидкостью, блок 10 управления, генератор 12 сигналов, ультразвуковой преобразователь 14, детектор 16 и блок 18 вычислений. Блок 10 управления соединен с генератором 12 сигналов, детектором 16 и блоком 18 вычислений. Выход генератора 12 сигналов соединен с преобразователем 14. Выход детектора 16 соединен с блоком 18 вычислений. Преобразователь 14 соединен с каналом 11 с жидкостью для генерации ультразвукового луча.
Во время работы устройства жидкость с плавающими в ней частицами протекает через канал 11. Блок 10 управления запускает серию последовательных измерений, в каждом из которых генератор 12 сигналов генерирует импульс, преобразуемый преобразователем 14 в ультразвуковую волну в канале 11. Преобразователь 14 улавливает отражения импульса и подает полученные сигналы в детектор 16. Детектор 16 отбирает сигналы, появившиеся в определенном временном окне относительно сгенерированного импульса. В силу того, что звук в жидкости имеет определенную скорость, временное окно определяет область, из которой могут приходить отраженные от частиц сигналы. Детектор 16 измеряет амплитуду отраженного сигнала (если он присутствует) во временном окне и направляет измеренное значение амплитуды в блок 18 вычислений. Блок 18 вычислений накапливает информацию об амплитудах в виде гистограммы. С этой целью блок вычислений использует определенное количество интервалов амплитуд и суммирует количество измерений отражений, которые дали амплитуды отраженного сигнала в соответствующих интервалах. После выполнения большого количества измерений указанным выше способом блок 18 вычислений вычисляет из содержащейся в гистограмме информации дополнительную информацию о распределении частиц по размеру.
На Фиг.2 показан смоделированный пример гистограммы для жидкостей с различной концентрацией присутствующих в них частиц, причем распределение fD(D) частиц по размеру в каждом случае является одинаковым (т.е. доля частиц с размером между D и D+dD в каждом случае составляет fD(D)dD для каждого значения D). Можно видеть, что помимо увеличения количества отражений форма распределения амплитуд также изменяется с ростом концентрации.
На Фиг.3 пунктирными линиями показаны для нескольких различных концентраций оценки распределения частиц по размеру, которые могут быть вычислены из амплитудных гистограмм на основе известных способов. Также показаны реальные распределения. Известные способы не учитывают влияние концентрации на форму распределения амплитуд. Результат заключается в том, что оценки распределений частиц по размеру отличаются друг от друга и при высоких концентрациях отклоняются от реального распределения частиц по размеру.
Настоящее изобретение предоставляет улучшение известного способа оценки распределения частиц по размеру, что обеспечивает, в том числе, учет эффекта влияния концентрации частиц. Данное улучшение основано на том факте, что отклонение формы гистограмм на Фиг.2 является результатом маскирования амплитуд отраженных сигналов, которые присутствуют при измерении сигнала отражения, но не учитываются при подсчете, поскольку в том же измерении отраженного сигнала присутствуют один или несколько сигналов отражения с более высокой амплитудой.
С этой целью используется выражение для распределения вероятности P(A)dA того, что измерение отраженного сигнала даст измеренную амплитуду в бесконечно малом интервале между A и dA. Данное выражение представляет собой
P(A)=P0(A)Q(A)
Здесь P0(A) соответствует немаскированному распределению вероятности, т.е. вероятности появления сигнала отражения вне зависимости от того, маскируется ли он другим сигналом с большей амплитудой. Множитель Q(A) выражает вероятность того, что в данном измерении отсутствуют частицы, создающие сигнал отражения с амплитудой, большей или равной А.
Множитель P0(A) соответствует распределению вероятности, которое используется в уровне техники в качестве полного распределения вероятности P(A) того, что амплитуда A в интервале от A до dA действительно будет измерена (т.е. не учитывается вероятность того, что сигнал отражения будет маскирован). Множитель
P0(A) может быть выражен в распределении fD(D) частиц по размеру по существу известным способом. Выражение для данного множителя может представлять собой, например
P0(A)=С∫dDfD(D)G(A|D)Vmeas(D)
Здесь С представляет собой концентрацию частиц (среднее количество частиц на единицу объема). G(A|D) представляет собой условную вероятность того, что сигнал отражения с амплитудой А является детектируемым при условии, что частица с размером D дает детектируемый сигнал отражения. Условная вероятность G(A|D) отражает эффект, заключающийся в том, что частица размера D дает сигналы отражения с различными амплитудами на различных расстояниях от центра луча.
Vmeas(D) представляет собой общий объем жидкости, из которого частица размера D может дать детектируемый сигнал отражения. Глубина этого объема определяется временным окном, в котором принимают сигналы отражений во время измерения, и поперечные размеры определяются уменьшением интенсивности луча до величины, когда амплитуда генерируемых сигналов отражения не превышает уровень An шума.
В часто встречающемся случае луча с гауссовским распределением объем Vmeas(D) может быть выражен, как:
Vmeas(D)=πΔz log(A0(D)/An)/2k
Здесь Δz представляет собой интервал в глубину, из которого принимаются сигналы отражения, k представляет собой стандартное отклонение, которое определяет скорость, с которой интенсивность луча спадает как функция расстояния от центра луча. A0(D) представляет собой максимальную амплитуду, которую имел бы сигнал отражения для частицы размера D, если частица находилась бы в центре луча.
В случае гауссовского луча также может быть приведено выражение для условной вероятности G(A|D):
G(A|D)=1/{A·log(A0(D)/An)}
Это выражение применимо при условии, что A0(D)>A>An. Для амплитуд, превышающих максимальную амплитуду A0(D), получаемую от частицы размера D, или меньших, чем уровень An шума, условная вероятность детектирования G(A|D) равна нулю.
В связи с этим должно быть понятно, что для лучей, имеющих распределения, отличные от гауссовского, соответственно должны использоваться другие выражения для Vmeas(D) и G(A|D).
Введенный выше множитель Q(A), который описывает эффект маскирования сигналов отражений другими сигналами отражений, имеющими амплитуду, превышающую или равную амплитуде А, также может быть выражен в терминах концентрации С и распределения fD(D) частиц по размеру. Для этого обычно используют представление в интегральном виде:
W(A)=∫dA'∫dDfD(D)G(A'|D)
Здесь интегрирование ведется по амплитуде от уровня шума до амплитуды А, для которой вычисляется вероятность детектирования. Множитель Q может быть аппроксимирован следующим выражением:
Q(A)=exp[-C(1-W(A))]
или, при дальнейшей аппроксимации, выражением:
Q(A)=[1-p+p(1-W(A)/Vmeas)]n,
где суммирование по k ведется от 1 до n; n представляет собой целое число, не превышающее максимальное количество частиц, которое физически помещается в объеме, являющемся источником измеряемых сигналов отражений, но значительно превышающее среднее количество частиц, которые дают измеряемые сигналы отражений; и p=CVmeas/n, где Vmeas представляет собой объем, из которого наибольшие частицы все еще могут генерировать эхо-сигналы, превышающие уровень шума.
Альтернативное выражение для множителя P0(A) может представлять собой, например:
P0(A)=C∫dDfD(D)∂V(A,D)/∂A
Здесь С представляет собой концентрацию частиц (среднее количество частиц на единицу объема). V(A,D) представляет собой объем, из которого частица размера D дает эхо-сигнал с амплитудой, превышающей или равной А. Глубина этого объема определяется временным окном, в котором принимают сигналы отражений во время измерения, и поперечные размеры определяются уменьшением интенсивности луча в зависимости от расстояния центра луча.
В часто встречающемся случае луча с гауссовским распределением объем V(A,D) может быть выражен, как:
V(A,D)=πΔz·log(A0(D)/A)/2k
Здесь Δz представляет собой интервал в глубину, из которого принимаются сигналы отражения, k представляет собой параметр, который характеризует скорость, с которой интенсивность луча спадает как функция расстояния от центра луча. A0(D) представляет собой максимальную амплитуду, которую имел бы сигнал отражения для частицы размера D, если частица находилась бы в центре луча. В связи с этим должно быть понятно, что для лучей, имеющих распределение, отличное от гауссовского, соответственно должны использоваться другие выражения для V(A,D).
Введенный выше множитель Q(A) выражает вероятность того, что помимо эхо-сигнала амплитуды А отсутствуют эхо-сигналы с большей амплитудой. Это описывает эффект маскирования сигналов отражений другими сигналами отражений с амплитудой, превышающей или равной амплитуде А. Множитель Q(A) также может быть выражен в терминах концентрации С и распределения fD(D) частиц по размеру. Для этого обычно используют представление в интегральном виде:
W(A)=∫dDfD(D)V(A,D)
Множитель Q может быть аппроксимирован следующим выражением:
Q(A)=exp[-CW(A)]
Исходя из выражения P(A)=P0(A)Q для распределения вероятности измерений сигналов отражений амплитуды А, которые не маскированы сигналами отражений с большей амплитудой, распределение fD(D) частиц по размеру оценивают, основываясь на системе амплитуд сигналов отражений, которые были измерены в большом количестве измерений. Это можно выполнить, например, при помощи нахождения оценки fD(D), которая минимизирует сумму Е квадратов разностей между предсказанным количеством измерений Npred амплитуд в последовательности интервалов Iai амплитуд и реально измеренным количеством Nmeas:
E=∑i(Nmeas(IAi)-Npred(IAi))2
Эта сумма фактически является показателем для вероятности измеренной системы амплитуд того, что распределение fD(D) частиц по размеру выбрано таким образом, что эта система является наиболее вероятной. Конечно, вместо использования суммы квадратов максимизация может быть также выполнена с использованием других показателей вероятности, например, с использованием произведения:
ΠiP0(Ai)Q(Ai)
вероятностей различных измерений Ai.
В случае такой оценки предпочтительно использовать параметризацию распределения fD(D) частиц по размеру, например, в виде мультимодального распределения:
fD(D)=∑iciexp(-(D-Di)2/2σi 2)
(i=1,2…M). В этом случае параметры ci, Di и σi 2 оцениваются таким образом, что в соответствии с используемым показателем вероятность измеренной системы амплитуд сигналов отражений максимизируется. Способы такой максимизации являются известными, и оценку параметров можно получить, применяя указанные способы к выражению P0(A)Q(A) для вероятности измеренных (и немаскированных) амплитуд сигналов отражений.
На Фиг.3 также показаны различные распределения частиц по размеру, которые вычислены указанными выше способами на основе количества сигналов отражений в примерах по Фиг.2. Эти распределения в пределах точности диаграммы по существу совпадают с реальным распределением. Должно быть ясно, что тем самым получается лучшая оценка распределения частиц по размеру.
На Фиг.4 показаны последовательности оценок распределений частиц по размеру для конкретной концентрации. Концентрация представляет собой долю жидкости, которая образована частицами. По горизонтали показаны реальные концентрации и по вертикали показаны концентрации, вычисленные на основе (смоделированных) измерений. Сплошная линия показывает совпадения вычисленных и реальных концентраций. Кружки показывают концентрацию, вычисленную с использованием нового способа, и крестики показывают концентрацию, вычисленную способом, известным из уровня техники. Фиг.4 показывает, что получены очевидно лучшие результаты особенно для высоких концентраций.
Должно быть ясно, что настоящее изобретение не ограничено только указанным выше конкретным способом оценки распределения частиц по размеру. Так, например, могут быть использованы различные формы параметризации распределения частиц по размеру, например, на основе значений (и/или производных от них величин) распределения частиц по размеру для нескольких размеров частиц и интерполяции распределения частиц по размеру между данными размерами частиц, или, например, в виде результата деления двух полиномов, чьи коэффициенты образуют параметры. Также могут быть использованы аппроксимации различных элементов выражения для вероятности P(IA).
Помимо этого, например, сначала может быть выполнена оценка множителя Q(A) как функции амплитуды А (например, путем предварительной оценки распределения частиц по размерам и последующего вычисления множителя с данной предварительной оценкой распределения), а затем измеренные количества сигналов отражений Nmeas(A) с различными амплитудами могут быть скорректированы при помощи этого множителя Ncorr(A)=Nmeas(A)/Q(A). Затем, основываясь на скорректированных количествах, распределение частиц по размеру может быть оценено способами, известными из уровня техники.
Хотя настоящее изобретение было описано в терминах явно выраженного распределения fD(D) частиц по размерам, очевидно, что для определенных приложений не является необходимым вычисление распределения частиц по размерам в явном виде. Если требуется только величина такая как, например, плотность массы частиц, которая дается интегралом:
∫dDfD(D)m(D),
то такая величина, которая представляет собой параметр распределения частиц по размерам, также может быть вычислена в неявном виде при оценке параметров распределения частиц по размеру, приводящей к наиболее вероятной системе измеренных амплитуд отраженных сигналов.
Используемый способ не ограничен измерением амплитуд, но также может быть распространен на любой вид измерений свойств отраженных сигналов, в которых при наличии большого количества частиц, дающих отражение, доминирующие частицы маскируют другие частицы.
Данный способ также применим к жидкостям, которые содержат различные типы частиц, когда можно определить, к какому типу частиц относятся измерения отраженного сигнала. Такое различие, например, может наблюдаться для самого отраженного сигнала, например, в виде знака первого пика в принятом ультразвуковом сигнале отражения в ответ на ультразвуковой импульс, имеющий определенный знак. В случае воды, в которой находятся капельки масла или частички песка, например, сигналы отражений от частичек песка и капелек масла могут быть различимы по знаку отражения.
Скорректированное распределение Pj(A)dA вероятности для измерения сигнала отражения для частицы типа j с амплитудой в пределах между А и A+dA в этом случае может быть описано как:
Pj(A)=Pj0(A)ΠiQi(A)
Здесь различные множители Qi(A) описывают для каждого из различных типов частиц i вероятность того, что отсутствуют частицы типа i, приводящие к детектированию сигнала с амплитудой, большей, чем А. Каждый из множителей Qi(A) выражен описанным выше способом в распределении fDi(D) частиц по размеру для соответствующего типа i частиц, то же самое верно и для вероятностей Pj0(A). Основываясь на этих выражениях для Pj(A) для различных типов частиц и в системе измерений амплитуд сигналов отражений, которые классифицированы в соответствии с типом частиц, параметры распределений fDi(D) могут быть оценены описанным выше способом. Так, например, распределения частиц по размеру могут быть оценены путем минимизации двойной суммы квадратов отклонений:
E=∑i∑m(Nimeas(IAm)-Nipred(IAm))2
количеств Nimeas измеренных сигналов отражений частиц типа m в различных интервалах IAm амплитуд и предсказанных количеств Nipred сигналов отражений, измеренных в этих интервалах.
Диаграмма на Фиг.5 показывает общий вид способа оценки распределения частиц по размеру. На первом этапе 51 генерируют импульс и на втором этапе 52 определяют, был ли принят в конкретном временном окне после импульса сигнал отражения, превышающий уровень шума. На третьем этапе 53 определяют, в какой из набора интервалов IA попадает амплитуда, и счетчик для данного интервала увеличивается на единицу. На четвертом этапе 54 предыдущие этапы повторяются до тех пор, пока не будет выполнено заданное количество n измерений сигналов отражений. Затем выполняется пятый этап 55, на котором выбирают параметры начального распределения частиц по размеру. После этого на шестом этапе 56, используя формулу P(A)=P0(A)Q(A), вычисляют предсказание для измеренных количеств и определяют разницу с измеренными количествами. Если разница является достаточно маленькой, способ завершается на седьмом этапе 57. В противном случае на восьмом этапе 58 параметры модифицируются таким образом, что разница предположительно уменьшается, и способ повторяется, начиная с шестого этапа 56. Естественно, оценка указанным способом предпочтительно выполняется при помощи компьютера.
Очевидно, что настоящее изобретение не ограничено описанным способом. Например, на шестом этапе 56 не является необходимым явное вычисление разницы, вместо этого может быть вычислена информация, которая необходима для выбора модификации параметров, и способ может быть завершен на седьмом этапе 57, если модификация не превышает некоторого порога.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ ПУЛЬПЫ | 2018 |
|
RU2694448C1 |
| НЕИНВАЗИВНЫЙ СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ПОТОКА РЕКИ, ОТКРЫТОГО КАНАЛА ИЛИ ЖИДКОСТИ, ТЕКУЩЕЙ В ПОДЗЕМНОЙ ТРУБЕ ИЛИ КАНАЛЕ | 2020 |
|
RU2820987C1 |
| СПОСОБ ПОДАВЛЕНИЯ ОШИБОК МНОГОЛУЧЕВОСТИ В ПРИЕМНИКЕ СПУТНИКОВОЙ НАВИГАЦИИ | 2010 |
|
RU2432585C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2016 |
|
RU2624798C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ВЕРТОЛЕТА С ИСПОЛЬЗОВАНИЕМ РАДИОЛОКАТОРА | 2003 |
|
RU2260815C2 |
| УСТРОЙСТВО ДАТЧИКА ДЛЯ ЦЕЛЕВЫХ ЧАСТИЦ В ПРОБЕ | 2008 |
|
RU2476858C2 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ТЕЧЕНИЯ КРОВИ | 2015 |
|
RU2610559C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ВОЗДУШНОГО ОБЪЕКТА В РЕЖИМЕ ХАОТИЧНОЙ ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКИ НЕСУЩЕЙ ЧАСТОТЫ ПРИ ОГРАНИЧЕННОМ КОЛИЧЕСТВЕ ИСПОЛЬЗУЕМЫХ ЧАСТОТ | 2010 |
|
RU2427003C2 |
| Способ определения положения сбрасываемой цементировочной пробки в обсадной колонне | 2022 |
|
RU2805636C1 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ПОВЕРХНОСТЬЮ НА БАЗЕ МНОГОКАНАЛЬНОЙ БОРТОВОЙ РЛС | 2006 |
|
RU2316786C1 |
Заявленное предложение относится к способу и устройству, с помощью которых, используя отражение ультразвуковых импульсов от макроскопических частиц, таких как капли масла или песчинок в воде, получают информацию о распределении частиц в жидкости по размеру. Заявленное устройство содержит блок управления, который соединен с генератором сигналов, детектором и блоком вычислений. При этом выход генератора сигналов соединен с входом преобразователя, а выход детектора соединен с входом блока вычислений, преобразователь соединен с каналом с жидкостью для генерации ультразвукового луча. Технический результат: обеспечение возможности использования ультразвуковых измерений для описания распределения частиц в жидкостях по размеру для более высоких концентраций. 2 н. и 5 з.п. ф-лы, 5 ил.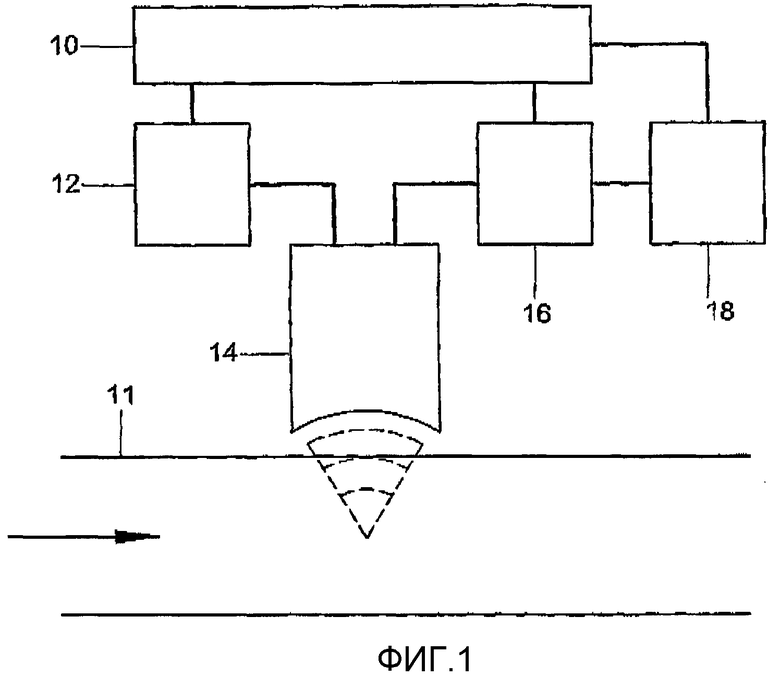
1. Способ для измерения параметров, которые описывают распределение частиц по размеру в жидкости, содержащий этапы
выполнения серий измерений сигналов отражения, в каждом из которых в жидкости генерируется сигнальный луч и измеряется значение (А) характеристики отражения от частицы в сигнальном луче;
выполнения оценки параметров способом максимального правдоподобия, принимая во внимание комбинацию измеренных значений (А), на основе выражения для вероятности измеренных величин как функции измеренных величин, данное выражение содержит первый множитель (Р) для вероятности измерения сигнала отражения, в котором отражение с измеренной величиной формирует часть, корректируемый вторым множителем (Q) для вероятности того, при этом отсутствует сигнал отражения с доминирующей величиной характеристики, который будет маскировать измеряемое значение, формируя часть измерения отражения.
2. Способ по п.1, в котором первый множитель (Р) содержит распределение частиц по размеру, искаженное распределением вероятности того, что частица конкретного размера приведет к измерению сигнала отражения, для которого отражение с измеряемой величиной образует часть.
3. Способ по п.1 или 2, в котором второй множитель (Q) содержит вероятность того, что отражение с величиной, отличной от измеряемой величины, образует часть измерения отражения, проинтегрированную по диапазону величин, отличных от измеряемых величин.
4. Способ по п.3, в котором второй множитель, по существу, соответствует  , где D является размером частицы, С является концентрацией частиц, fD(D) является плотностью частиц с размером частиц D, и G(A'|D)) является условной вероятностью того, что отражение с амплитудой А является детектируемым, если частица с размером D дает детектируемый сигнал отражения.
, где D является размером частицы, С является концентрацией частиц, fD(D) является плотностью частиц с размером частиц D, и G(A'|D)) является условной вероятностью того, что отражение с амплитудой А является детектируемым, если частица с размером D дает детектируемый сигнал отражения.
5. Способ по п.1 или 2, в котором оценка способом наибольшего правдоподобия содержит выполнение подсчета количеств измерений сигналов отражения, в которых измеряемая величина попадает в соответственные интервалы значений, и оценка выбирается таким образом, что минимизируется совокупность отклонений между подсчетами в различных интервалах и подсчетами, предсказанными в соответствии с вероятностью, как функцией измеряемой величины.
6. Способ по п.1 или 2, в котором при измерениях сигналов отражений фиксируют различие между различными типами частиц, которые дают сигналы отражений, и при выполнении оценки способом наибольшего правдоподобия указанное выражение корректируют произведением соответствующих вторых множителей для вероятности того, что при этом отсутствует сигнал отражения с доминирующей величиной характеристики соответствующего типа частиц, который будут маскировать измеряемую величину, формируя часть измерения сигнала отражения.
7. Устройство для измерения параметров, которые описывают распределение частиц по размеру в жидкости, которое содержит
канал с жидкостью;
средство для генерирования ультразвукового луча в канале с жидкостью;
средство для измерения характеристики отражения луча от частицы в канале с жидкостью;
блок обработки данных, выполненный с возможностью выполнения оценки параметров способом максимального правдоподобия, принимая во внимание комбинацию измеренных значений (А), на основе выражения для вероятности измеренных величин как функции измеренных величин, данное выражение содержит первый множитель (Р) для вероятности измерения сигнала отражения, в котором отражение с измеренной величиной формирует часть, корректируемый вторым множителем (Q) для вероятности того, что при этом отсутствует сигнал отражения с доминирующей величиной характеристики, который будет маскировать измеряемое значение, формируя часть измерения отражения.
| Устройство перезарядки разверты-ВАющЕгО бАРАбАНА фАКСиМильНОгОАппАРАТА | 1977 |
|
SU801305A1 |
| US 3779070 A, 18.12.1973 | |||
| US 6205848 B1, 27.03.2007 | |||
| US 5245290 A, 14.09.1993 | |||
| SU 9893689 A1, 15.01.1983. | |||

