[0001] Настоящее изобретение относится к способу и устройству для измерения поверхностной скорости по всему поперечному сечению реки, открытого канала или жидкости, текущей в трубе или канале и расчета расхода путем вычисления формы и уровня для расчета площади влажной области и использования уравнения неразрывности Q = V*A.
[0002] В частности, настоящее изобретение относится к неинвазивному способу и устройству с микроволновой антенной, которая протянута над рекой или открытым каналом или текущей водой в подземной трубе или канале.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0003] Неинвазивные способы измерения скорости потока воды в реке или жидкости в открытом канале или сточной трубе, т. е. способы, при которых не происходит контакта измерительного аппарата с жидкостью, становятся все более популярными.
Среди методов, используемых для измерения скорости жидкости неинвазивным образом, можно выделить акустические способы, оптические способы, лазерные способы и микроволновые способы, последний из которых является наиболее популярным.
[0004] Определение профиля скорости для измерения скорости жидкости в реке или канале используется уже в течение длительного времени. Первый способ состоит из датчика скорости, прикрепленного к штанге, которая перемещается оператором по поперечному сечению реки или канала. Когда уровень воды и/или скорость воды слишком высоки для того, чтобы оператор мог безопасно выполнить определение профиля, датчик скорости может быть прикреплен к кабельной крановой системе для рек, которая перекинута через реку или канал. Эти способы являются очень времязатратными и очень дорогими. Когда используется кабельная крановая система для рек, она представляет собой стационарное применение, которое можно использовать только на одном конкретном участке и нельзя использовать, когда по реке проплывает тяжелый плавучий мусор.
[0005] В последнее время используется ADCP (акустический доплеровский профилометр течений) для измерения расхода в реках или открытых каналах. ADPC размещают на небольшой лодке или плавучем устройстве, которое привязываются оператором к мосту или посредством кабельной крановой системы для рек. Недостатки этих способов заключаются в том, что они являются времязатратными и не могут быть использованы при наличии в реке или канале плавучих частей и устройств, а также когда реки и каналы выходят из берегов.
[0006] Для преодоления этой проблемы в последнее время используются неинвазивные устройства, в основном микроволновые радиолокационные устройства, которые переносятся оператором с моста, определяя профиль поверхностной скорости.
Недостатки этого способа заключаются в том, что он является времязатратным, и в том, что опоры моста создают возмущения потока как вверх, так и вниз по течению, особенно когда опоры собирают плавучий мусор, переносимый рекой или каналом.
[0007] Бесконтактные устройства также переносят с помощью кабельной крановой системы для рек, но этот способ имеет недостаток, заключающийся в том, что устойчивость кабельной крановой системы для рек недостаточна для проведения точных измерений. Кроме того, кабельная крановая система для рек остается очень дорогой и негибкой.
[0008] Гидрологи пытались использовать дроны с бесконтактными устройствами для измерения скорости, но не получали идеальных результатов, поскольку эти устройства для измерения скорости не были специально созданы для переноски дронами.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0009] Целью настоящего изобретения является предоставление
усовершенствованного неинвазивного способа и устройства для измерения расхода реки, открытого канала или жидкости, текущей в трубе или канале, когда для последнего доступ оператора к месту измерения затруднен, невозможен или опасен или просто необходимо избежать входа в осложненное ограниченное пространство.
[0010] Специальное устройство для неинвазивного измерения скорости потока устанавливается на дрон, который точно пролетает над измеряемой поверхностью жидкости, собирая показания скорости. Информация о скорости связана с измерением формы и уровня для расчета площади влажной области, и с использованием уравнения неразрывности Q = V*A рассчитывают расход.
[0011] Предпочтительным устройством для неинвазивного измерения скорости является микроволновое радиолокационное устройство, но это может быть и любая другая подходящая технология для неинвазивного измерения скорости. Дроны удобны в использовании, но создают сигналы, шум и вызывают ошибки в результатах измерений.
[0012] Микроволновые измерительные устройства используют доплеровский сдвиг частоты для измерения скорости водной поверхности, например, лазерные или бесконтактные акустические устройства. Вибрации, вызываемые летающим дроном, вызывают пики частоты, которые необходимо устранить с использованием бортового (бортовых) датчика (датчиков) вибрации для их обнаружения. Для уменьшения общих вибраций, вызываемых летающим дроном, которые увеличивают общий уровень шума, снижая соотношение сигнал/шум, можно использовать антивибрационную систему подвески. Тангаж, крен и рыскание дрона также влияют на измерение, и их необходимо измерять при помощи датчиков угла для точных измерений скорости. GPS и измерения высоты могут быть полезны, но не являются обязательными, поскольку дроны могут быть настроены на полет по точным маршрутам с высокой точностью. Для введения поправки на влияние ветра можно использовать устройство измерения ветра, предпочтительно 2-х или 3-х осевое измерительное устройство с неподвижной частью, но эти дополнительные измерения полезны только тогда, когда скорость воды относительно мала.
[0013] В частности, настоящее изобретение относится к неинвазивному микроволновому измерительному устройству для расчета расхода жидкости, причем данное устройство содержит:
- микроволновое устройство для неинвазивного измерения скорости жидкости, использующее полосковую антенну или рупорную антенну для генерирования микроволнового сигнала, который передается под определенным углом α наклона по направлению к поверхности жидкости, и для приема отраженного микроволнового сигнала от поверхности жидкости с доплеровским сдвигом частоты;
- дрон, к которому подвешено устройство для измерения с помощью системы подвески, причем указанная система подвески снижает вибрационный шум, производимый дроном;
- по меньшей мере один датчик вибрации для выявления и устранения ложных показаний скорости, вызываемых дроном;
- по меньшей мере один датчик угла для введения поправки на тангаж, крен и рыскание от дрона, которые влияют на измерение поверхностной скорости жидкости, и определения конечного угла от устройства (03) для измерения по направлению к поверхности (16) жидкости.
[0014] Согласно предпочтительным вариантам осуществления изобретения устройство дополнительно ограничено одним из следующих признаков или их подходящей комбинацией:
- микроволновое устройство для неинвазивного измерения скорости жидкости содержит 3D-(трехмерную) систему управления с тремя двигателями, способными автоматически изменять положение микроволнового устройства для неинвазивного измерения для введения поправки на тангаж, крен и рыскание дрона;
- микроволновое устройство для неинвазивного измерения скорости жидкости содержит датчики GPS и датчики в виде альтиметров;
- микроволновое устройство для неинвазивного измерения скорости жидкости содержит интерфейс для сбора данных GPS и альтиметра с дрона;
- камера и свет для облегчения пилотирования, особенно в подземных трубах и каналах;
- микроволновое устройство для неинвазивного измерения скорости жидкости содержит записывающее устройство для записи изображений или видео, снятых дроном, вместе с результатами измерений скорости жидкости и/или данными GPS и альтиметра;
- микроволновое устройство для неинвазивного измерения скорости жидкости содержит устройство измерения уровня или расстояния и/или устройство измерения скорости и направления ветра;
- система подвески содержит по меньшей мере три трубки, соединенные друг с другом путями, причем трубки соединяют устройство для измерения скорости с дроном, причем устройство для измерения скорости прикреплено к первому концу трубок, а дрон прикреплен ко второму концу трубок;
- по меньшей мере три трубки имеют разную длину, чтобы обеспечить угол для устройства для измерения относительно жидкости в виде воды и горизонтальной плоскости дрона, угол, который измеряется по меньшей мере одним датчиком угла;
- эластичные тросы предусмотрены в трубках и используются для подвешивания устройства для измерения, причем верхний конец эластичных тросов соединен с системой подвески, прикрепленной к дрону, а нижний конец эластичных тросов прикреплен к устройству для измерения, причем нижний конец эластичных тросов не имеет трубок и немного длиннее трубок;
- упругость эластичных тросов выбрана таким образом, чтобы поглощать нежелательные вибрации, причем вертикальные перемещения устройства для измерения остаются незначительными;
- система подвески содержит жесткую верхнюю пластину, соединенную с дроном, и жесткую нижнюю пластину, соединенную с устройством для неинвазивного измерения, обе пластины соединены с демпферами в виде амортизирующего блока.
[0015] Настоящее изобретение также относится к неинвазивному способу измерения скорости измерения и распределения на поверхности жидкости, текущей в трубе или канале, или в реке, или открытом канале, причем в способе используют микроволновое устройство для неинвазивного измерения скорости жидкости, подвешенное к дрону и содержащее по меньшей мере один датчик вибрации, причем указанный способ включает этапы:
- генерирования микроволновых сигналов с использованием полосковой антенны или рупорной антенны;
- приема отраженных микроволновых сигналов от поверхности текущей жидкости;
- генерирования ряда дискретных данных, выраженных в амплитуде как функции времени, из сгенерированных микроволновых сигналов и отраженных микроволновых сигналов с доплеровскими сдвигами частоты;
- преобразования спектра данных, выраженных во временной области, в область частоты посредством преобразования Фурье, чтобы соответствовать первой кривой Гаусса;
- определения общей измеренной скорости (основного μ) и общего распределения скорости (стандартного отклонения σ) по первой кривой Гаусса;
- измерения механических вибраций дрона на этапе (a) генерирования и этапе (b) приема сигналов для определения последовательности данных вибрации, измеряемых датчиком вибрации;
- генерирования из данных вибрации ряда дискретных данных, выраженных в амплитуде как функции времени;
- преобразования спектра данных вибрации, выраженных во временной области, в область частоты посредством преобразования Фурье, чтобы соответствовать второй кривой Гаусса;
- определения измеренной скорости (средней величины μ), вызываемой вибрацией, и распределения скорости (стандартного отклонения σ), вызываемого вибрацией, по второй кривой Гаусса;
- применения коррекции к общей измеренной скорости и общему распределению скорости, полученных на этапе (e), путем вычитания измеренной скорости, вызываемой вибрацией, и распределения скорости, вызываемого вибрацией, полученных на этапе (j), чтобы исключить вибрации дрона при расчете измерения скорости и распределения скорости жидкости.
[0016] Согласно предпочтительным вариантам осуществления настоящего изобретения способ дополнительно ограничен одним из следующих этапов или их подходящей комбинацией:
- поверхностную скорость жидкости определяют по сгенерированным микроволновым сигналам и отраженным микроволновым сигналам с доплеровскими сдвигами частоты и вводят поправку на тангаж, крен и рыскание от дрона путем учета данных, измеренных по меньшей мере одним датчиком угла.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0017] На фиг. 01 описана вся система (01), содержащая дрон (02), систему (04) подвески, устройство (03) для неинвазивного измерения скорости и необязательные дополнительные устройства (05), (06) и (07).
[0018] На фиг. 02 описано, как устройство (03) для неинвазивного измерения скорости прикреплено к дрону (02) с использованием системы (04) подвески.
[0019] На фиг. 03 A подробно описана система (04) подвески, с помощью которой устройство (03) для неинвазивного измерения скорости прикреплено к дрону (02).
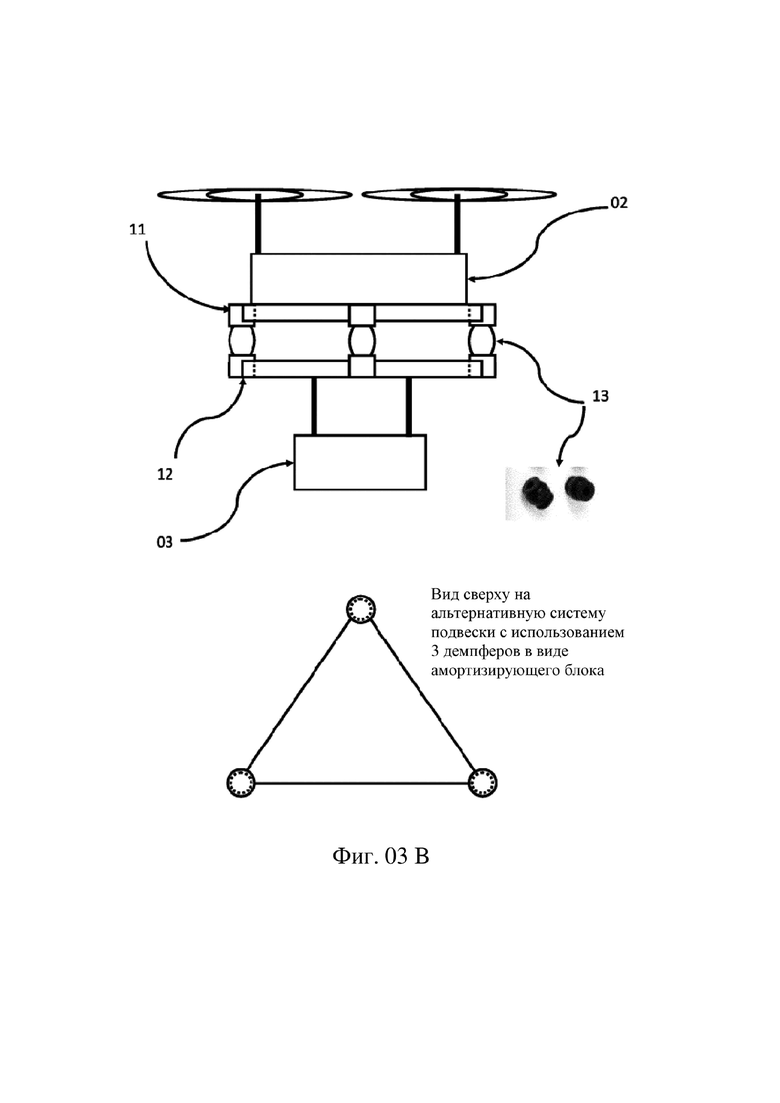
[0020] На фиг. 03 B описана альтернативная система (04) подвески, с помощью которой устройство (03) для неинвазивного измерения скорости прикреплено к дрону (02).
[0021] На фиг. 04 описаны переданный микроволновый сигнал (14) и возвращенный микроволновый сигнал (15) от устройства (03) для неинвазивного измерения скорости, прикрепленного к дрону (02).
[0022] На фиг. 05 описан сигнал (17) вибрации, вызванный дроном (02), и измерительный сигнал (18) от отраженного микроволнового сигнала.
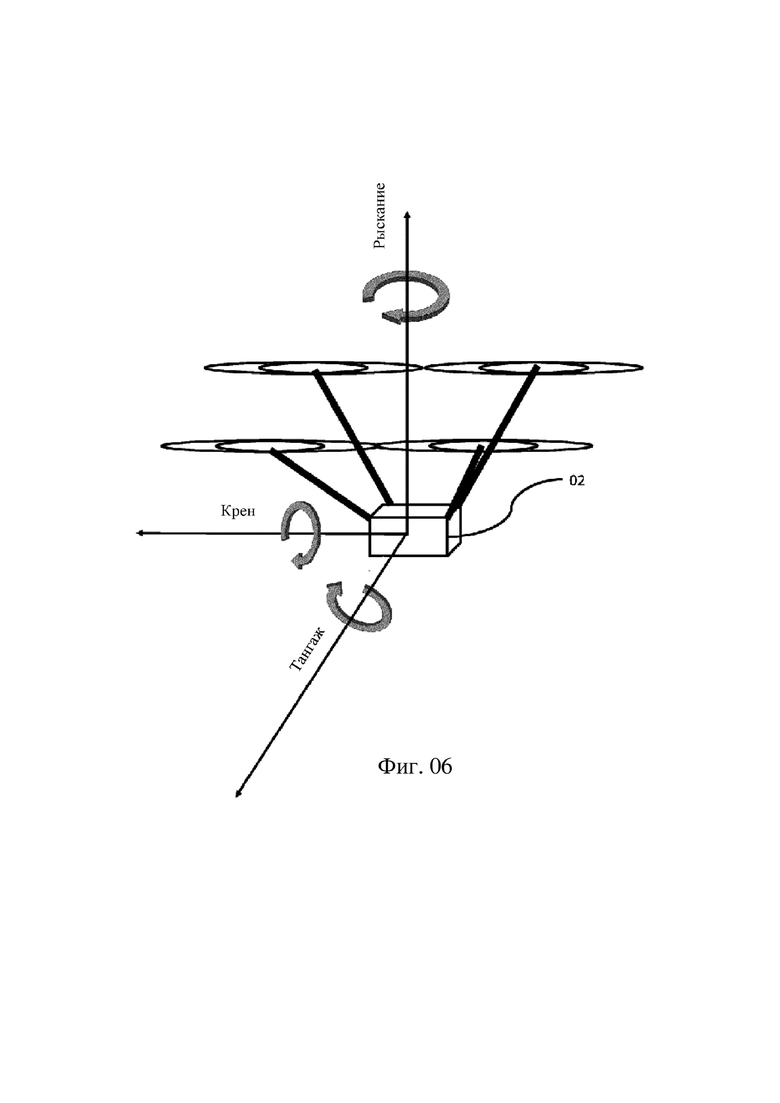
[0023] На фиг. 06 описаны тангаж, крен и рыскание дрона.
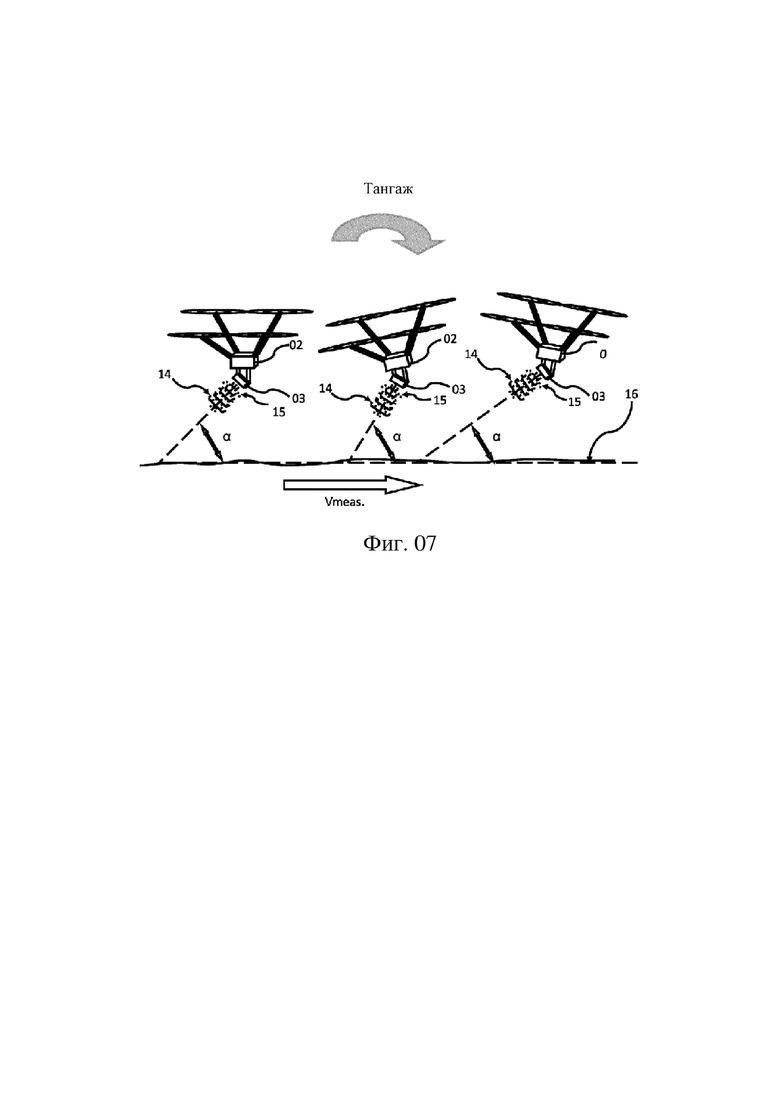
[0024] На фиг. 07 описано влияние тангажа на измеренный сигнал.
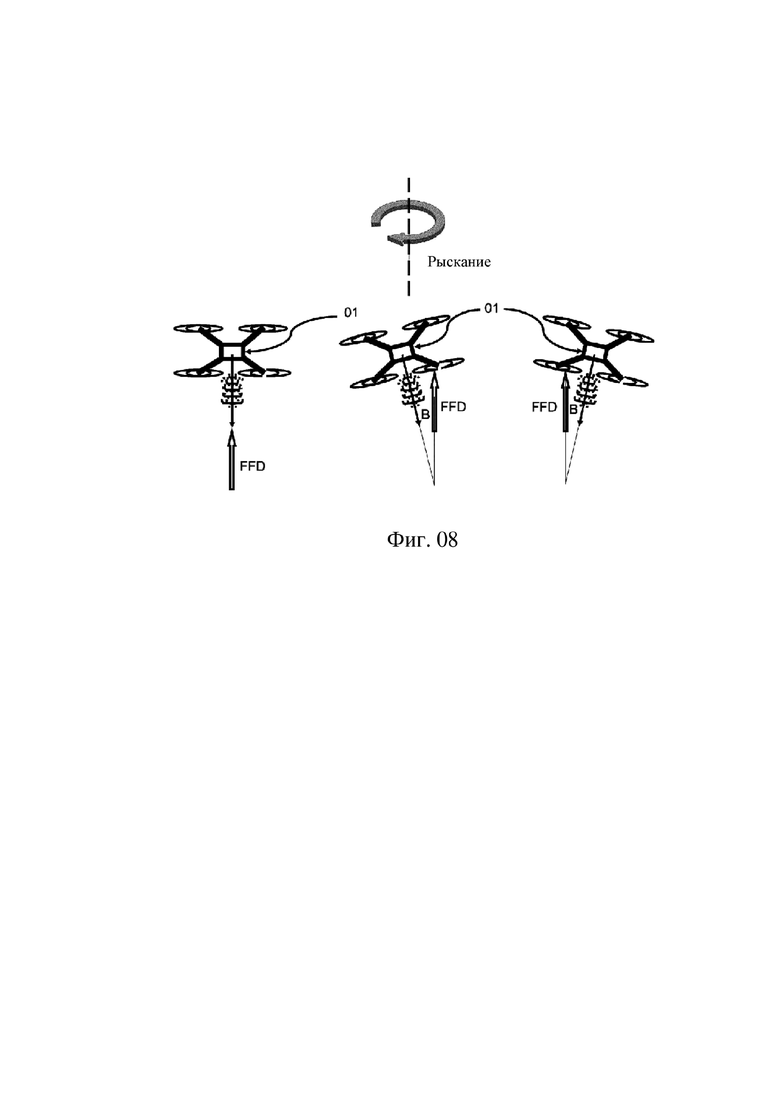
[0025] На фиг. 08 описано влияние рыскания на измеренный сигнал.
[0026] На фиг. 09 описан способ измерения поверхностной скорости реки или открытого канала.
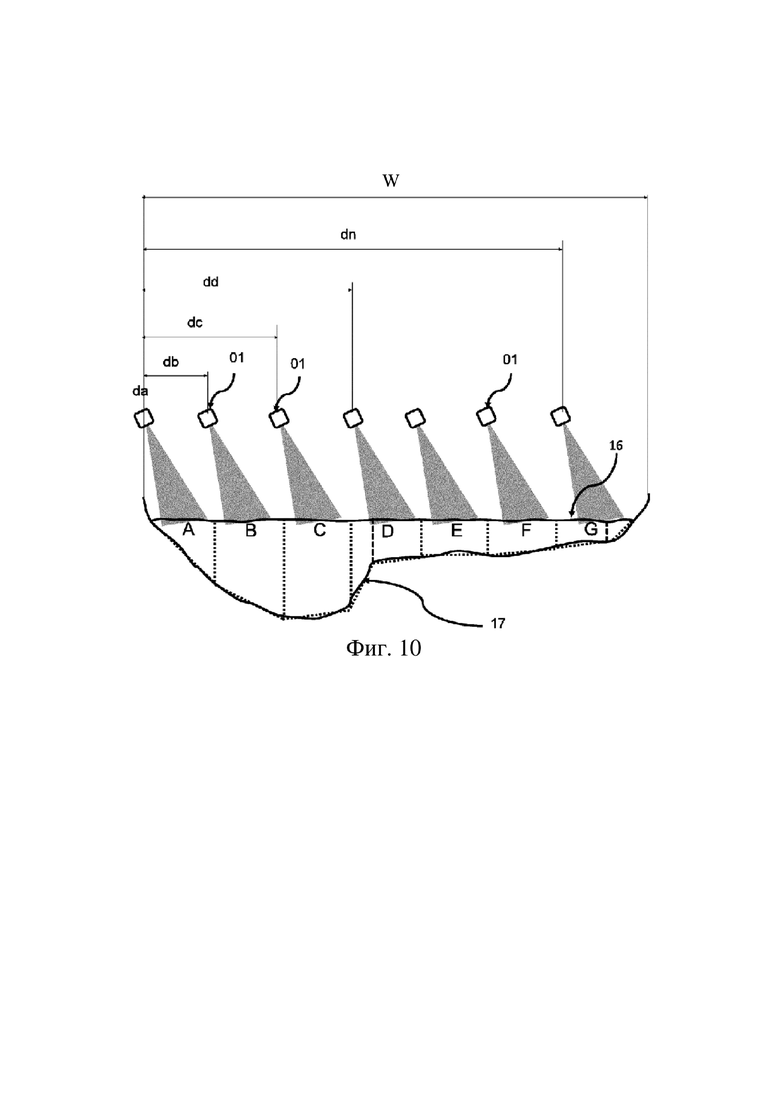
[0027] На фиг. 10 описано влияние крена при постоянных скорости и направлении ветра в месте измерения скорости.
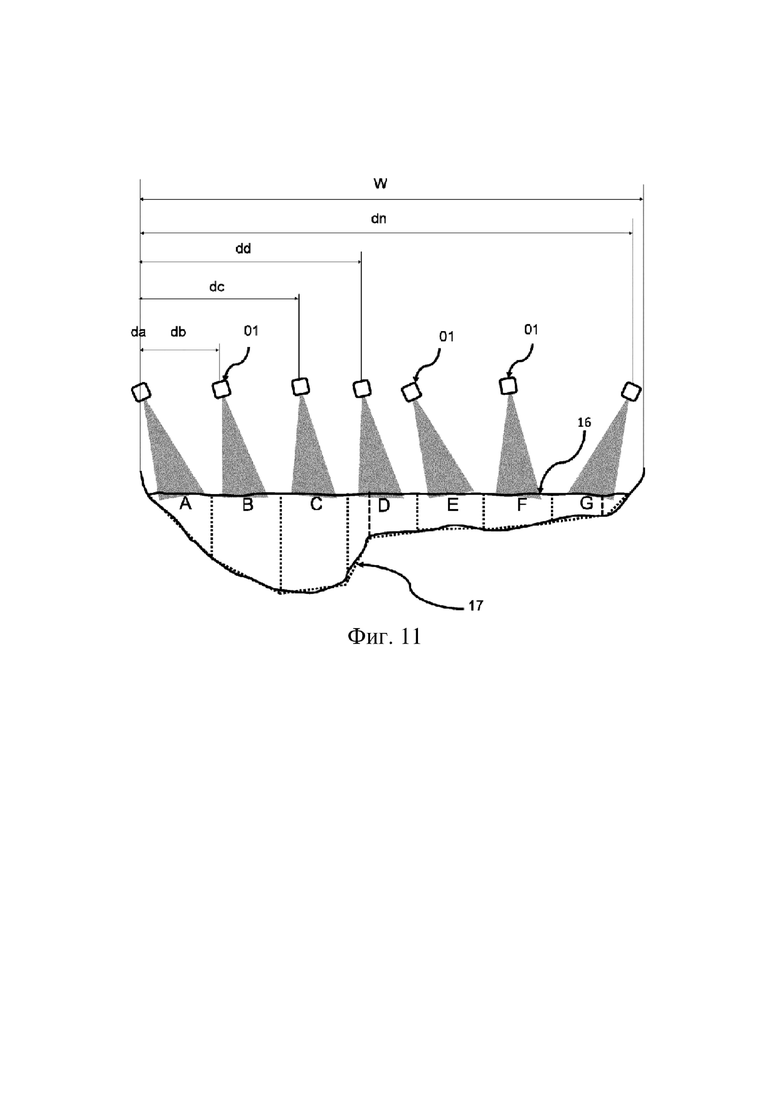
[0028] На фиг. 11 описано влияние крена при изменении скорости и направления ветра в месте измерения скорости.
[0029] На фиг. 12 описан второй способ измерения поверхностной скорости реки или открытого канала.
[0030] На фиг. 13 описано выполнение измерения устройством (01) в подземной трубе или канале (22).
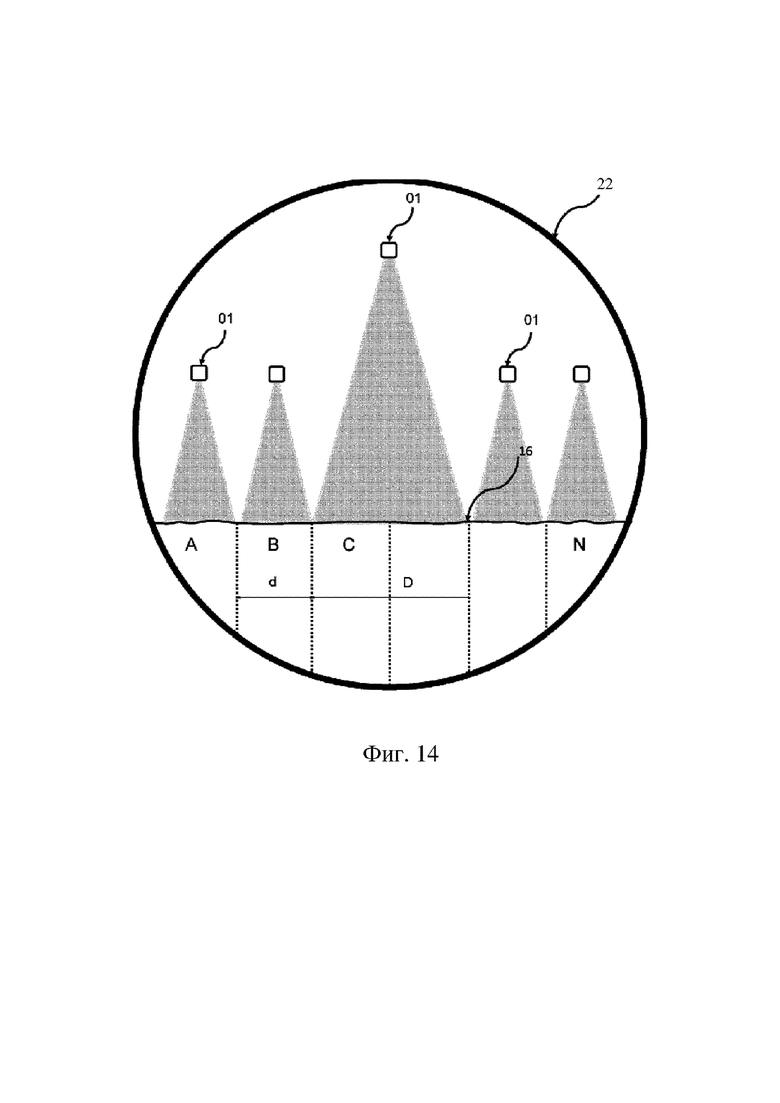
[0031] На фиг. 14 описаны два способа измерения поверхностной скорости в подземной трубе или канале (22).
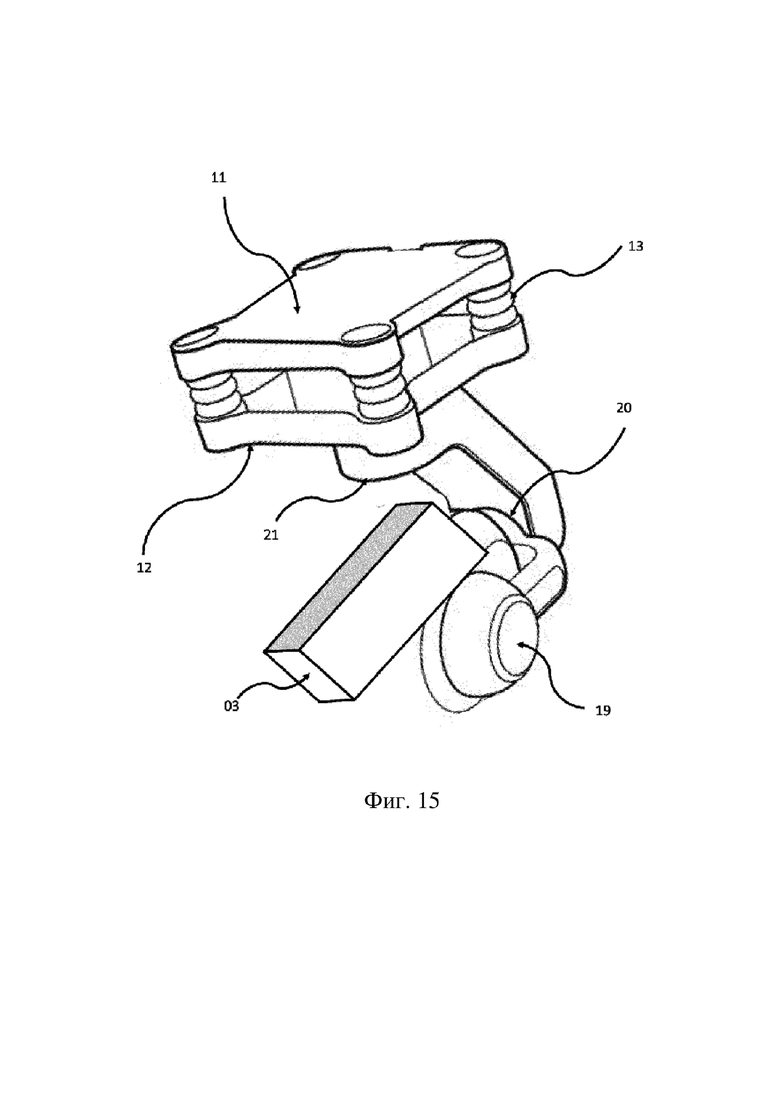
[0032] На фиг. 15 описан альтернативный способ, который заключается в непрерывной регулировке 3D-движения для устройства (03) для неинвазивного измерения с использованием двигателя (19) тангажа, двигателя (20) крена и двигателя (21) рыскания.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0033] Настоящее изобретение относится к неинвазивному способу и устройству для определения профиля поверхностной скорости реки, открытого канала или подземного трубопровода, доступ оператора к которым затруднен, опасен или невозможен. Устройство (01) содержит дрон (02), несущий устройство для неинвазивного измерения скорости, предпочтительно микроволновое радиолокационное устройство (03).
Это устройство подвешено к дрону при помощи системы (4) подвески, которая значительно снижает любые вибрации, генерируемые дроном (02). Дроном управляет оператор с берега реки или со стороны открытого канала, или с моста, или на расстоянии через Интернет или спутниковое управление, или в режиме автопилота. Дрон может летать достаточно далеко от опор моста, которые могут вызывать возмущения потока. Для измерения расхода в подземных трубопроводах (22) дроном можно управлять через смотровой люк или другой доступ для его пролета над измеряемой поверхностью жидкости.
[0034] Дрон предпочтительно летает на определенном постоянном расстоянии над поверхностью жидкости, чтобы он не пострадал от плавающего мусора, переносимого жидкостью. Расстояние может быть любым, от 0,5 м до нескольких метров, в зависимости от применения и плавающего мусора.
[0035] Дрон также может нести дополнительное устройство (05) измерения расстояния, но обычно вполне достаточно точности GPS и альтиметра дрона для расположения дрона точно над поверхностью жидкости. GPS-координаты и высота могут быть получены с дрона (02) интерфейсом (07), связанным с устройством (03) для неинвазивного измерения скорости, по соответствующему каналу связи или могут быть сгенерированы дополнительным GPS-приемником и альтиметром, включенными в интерфейс (07), связанный с устройством (03) для неинвазивного измерения скорости.
Современные дроны обычно могут точно летать в предварительно определенных положениях, которые могут повторяться с течением времени, избегая обработки данных GPS и альтиметра. По соответствующему каналу связи или по любой подходящей команде интерфейс (07) может сообщить дрону (02), что измерение определенной точки на поверхности жидкости завершено и что дрон (02) может лететь к следующей определенной точке измерения.
[0036] Необязательно для подтверждения данных о скорости или их коррекции при необходимости может использоваться устройство (06) измерения скорости и направления ветра. Информация о скорости ветра обычно интересна только тогда, когда поверхностная скорость воды мала.
[0037] На фиг. 02 показан дрон (02) с устройством (03) для измерения скорости, прикрепленным к дрону с использованием специальной системы (04) подвески. Длина ножек (08) подвески может быть одинаковой, как показано на фиг. 02, или может быть разной, как показано на фиг. 03 A, где передние ножки короче задних, чтобы автоматически задавать угол для устройства для измерения относительно водной поверхности и горизонтальной плоскости дрона.
[0038] На фиг. 03 A показан подробный вид системы подвески, состоящей из легких жестких и прочных трубок и штанг. Обычно предпочтительными являются трубки и штанги из углеродного волокна. Могут быть использованы три или более трубок (08).
Они прочно прикреплены с использованием механической конструкции, сделанной из путей (09). Внутри трубок (08) используются эластичные тросы (10) для подвешивания устройства (03) для измерения. Эластичные тросы крепятся на верхнем конце к системе подвески, которую прикрепляют к дрону (02). На нижнем конце тросы (10) не имеют трубок (08) и немного длиннее трубок. Устройство для измерения будет прикреплено к эластичным тросам. Упругость тросов будет выбрана таким образом, чтобы нежелательные вибрации поглощались, а вертикальные перемещения оставались незначительными.
[0039] На фиг. 03 B показан подробный вид альтернативной системы подвески с использованием верхней легкой жесткой пластины (11), прикрепленной к дрону, и нижней легкой жесткой пластины (12), прикрепленной к устройству (03) для неинвазивного измерения, пластина (11) и пластина (12) соединены с демпферами (13) в виде амортизирующего блока, обладающими требуемыми характеристиками упругости и подвески для данного применения.
[0040] Важно, чтобы устройство для измерения, используемое для переноски на дронах, имело конкретные дополнительные функциональные признаки, позволяющие выполнять точные измерения. Среди этих функциональных признаков необходимы датчики угла и датчики вибрации.
[0041] Несмотря на эластичную систему подвески, винты дрона (02) могут вызывать механические вибрации. Эти вибрации обычно имеют стабильную частоту, которая может быть интерпретирована измерительной системой как доплеровский сдвиг частоты, представляющий измерение скорости, которой следует пренебречь, как поясняется более подробно ниже. Спектр скорости воды основан на микроволновом сигнале, возвращаемом текущей водой, с доплеровским сдвигом частоты, пропорциональным скорости воды. В микроволновой радиолокационной системе может использоваться рупорная антенна, или полосковая антенна, или полосковая многоэлементная антенна.
[0042] На фиг. 04 показано микроволновое устройство (03) для измерения, подвешенное к дрону (02), отправляющее микроволновый сигнал (14) на водную поверхность (16), при этом указанная водная поверхность отражает обратный сигнал (15).
[0043] Предпочтительные этапы преобразования спектра скорости в поверхностную скорость жидкости описаны в документе EP 3011278. Они выглядят следующим образом. Каждый отраженный импульс генерирует данные измерения.
Определенное количество отраженных импульсов в последовательности измерений будет генерировать некоторое количество дискретных данных, выраженных в амплитуде как функции времени. Спектр данных, выраженных во временной области, преобразуют в область частоты посредством дискретного преобразования Фурье (DFT) и предпочтительно быстрого преобразования Фурье (FFT). Затем кривую Гаусса размещают в спектре дискретных данных, выраженных в области частоты, и параметры кривой Гаусса, а именно средняя величина μ и стандартное отклонение σ, представляют измеренную скорость и распределение скорости соответственно.
[0044] На фиг. 05 проиллюстрирован спектр скорости с размещенной кривой (18) Гаусса, а также представлен сигнал, возникающий в результате вибрации, вызываемой винтами (17). Анализ доплеровской частоты не позволяет отличить сигнал, генерируемый вибрацией, от сигнала, генерируемого текущей жидкостью, оба принимаются как сигналы скорости, и микропроцессор не может решить, какой сигнал принять, и будет переключаться между обоими сигналами. Если устройство для измерения оснащено одним или несколькими датчиками вибрации, как в настоящем изобретении, к результату можно применить корректировку. Действительно, датчик вибрации способен выявлять и устранять ложные показания скорости, вызываемые дроном (02) (связанные с вибрацией, вызываемой винтами). Такие механические вибрации можно интерпретировать как показание (показания) (17) скорости, являющееся (являющиеся) более энергичным (энергичными), чем реальное измерение (18) скорости, как показано на фиг. 05. Этот (эти) датчик (датчики) будет (будут) обнаруживать только механические вибрации, и на анализе, полученном от датчика (датчиков) вибрации, будет отображаться только точечная кривая Гаусса. Применяется тот же подход к анализу сигналов. Каждый образец генерирует данные измерения. Определенное количество образцов в последовательности измерений будет генерировать некоторое количество дискретных данных, выраженных в амплитуде как функции времени. Спектр данных, выраженных во временной области, преобразуют в область частоты посредством дискретного преобразования Фурье (DFT) и предпочтительно быстрого преобразования Фурье (FFT). Затем кривую Гаусса размещают в спектре дискретных данных, выраженных в области частоты, и параметры кривой Гаусса, а именно средняя величина μ и стандартное отклонение σ, представляют измеренную скорость, вызываемую вибрацией, и распределение скорости, вызываемое вибрацией. Ввиду наличия только μ и σ из сигнала вибрации его можно легко математически удалить из комбинированного сигнала (называемого также «общим сигналом» в настоящем изобретении), оставив только информацию (18) о скорости жидкости.
[0045] Дрон представляет собой беспилотный летательный аппарат, который обладает параметрами тангажа, крена и рыскания при движении или нахождении над поверхностью жидкости, как показано на фиг. 06.
[0046] Как показано на фиг. 07, тангаж изменяет угол α наклона от подвешенного микроволнового устройства для измерения, и этот угол α оказывает прямое влияние на полученный результат расчета горизонтальной скорости жидкости, поскольку измеренную скорость необходимо разделить на косинус этого угла α. Очень важно, чтобы микроволновое устройство для измерения, переносимое дроном, было оснащено надлежащим измерительным устройством для угла тангажа, поскольку он изменяется в зависимости от скорости и направления ветра. Крен и рыскание менее важны, так как крен не влияет непосредственно на результат измерения скорости жидкости, а лишь немного сдвигает положение освещенного участка поверхности жидкости. Рыскание непосредственно влияет на измеренную скорость жидкости, но угол рыскания обычно остается небольшим, и корректировка остается небольшой.
[0047] На фиг. 08 показано влияние рыскания. Когда микроволновый луч не параллелен стрелке направления потока жидкости FFD, но имеет угол Β, измеренную скорость необходимо разделить на косинус угла Β рыскания.
[0048] На фиг. 09 показан пример участка реки, который необходимо измерить.
Форма русла (17) реки измерена и сохранена в устройстве для измерения. Уровень воды в сочетании с формой русла реки позволяет рассчитать общую ширину поверхности от участка W, омываемого водой, расстояние перехода от одного берега реки до другого. Эта общая ширина W делится на количество n участков, имеющих одинаковую ширину wa, wb, …, wn. Каждая площадь рассчитывается для каждого участка A, B, C… N. В примере, показанном на фиг. 09, участок А будет рассматриваться как треугольник, участки В, С, Е и F будут рассматриваться как трапеции, участок D – как сумма двух трапеций, а участок G – как сумма трапеции и треугольника.
[0049] Устройство (01) (дрон (02) и микроволновое устройство (03) для неинвазивного измерения) управляется таким образом, чтобы микроволновый луч освещал центральную часть каждого участка A, B, C … N, приводя устройство в движение на расстоянии da, db, dc … dn от одного берега реки.
[0050] Альтернативным способом является определение участков A, B, C … N, имеющих одинаковую площадь вместо одинаковой ширины, и управление устройством (01) в положении для освещения центральной части каждого участка равного площади микроволновым лучом.
[0051] На фиг. 10 показано влияние постоянного угла крена на положение устройства (01) (расстояние da, db, dc, … dn) для освещения центральной части каждого участка микроволновым лучом (постоянный угол крена из-за постоянной скорости и направления ветра).
[0052] На фиг. 11 показано влияние непостоянного угла крена на положение устройства (01) (расстояние da, db, dc, … dn) для освещения центральной части каждого участка микроволновым лучом (непостоянный угол крена из-за непостоянной скорости и направления ветра).
[0053] Скорость потока для каждого участка N можно рассчитать по уравнению неразрывности QN = VavgN * AN; где QN – скорость потока с участка N, VavgN – средняя скорость в участке N, и AN – площадь с участка N.
Средняя скорость участка N, VavgN, может быть рассчитана по измеренной поверхностной скорости на участке N, Vmeas. N, умноженное на коэффициент коррекции участка N, KN.
[0054] Коэффициент коррекции KN с участка N определяется с использованием ширины wn участка N, средней глубины жидкости в участке N и математической модели, вычисляющей эти данные для расчета коэффициента коррекции KN.
[0055] К общей скорости потока реки относится сумма всех отдельных скоростей потока на каждом участке: QTOT = QA + QB + QC + … QN.
[0056] Альтернативный способ описан на фиг. 12 и заключается в перемещении устройства (01) (дрона (02) с микроволновым устройством (03) для неинвазивного измерения) с постоянной скоростью над всей шириной W реки от одного берега реки к другому. Скорость устройства (01) в метрах в секунду, разделенная на время, необходимое для полной последовательности измерения, дает расстояние d в метрах.
Площадь под этим расстоянием d (A, B, C, … N) можно рассчитать, зная форму русла реки и уровень воды.
[0057] Скорость потока для каждого участка N может быть рассчитана по уравнению неразрывности QN = VavgN * AN; где QN – скорость потока с участка N, VavgN – средняя скорость в участке N, и AN – площадь с участка N.
[0058] Средняя скорость участка N, VavgN, может быть рассчитана по измеренной поверхностной скорости на участке N, Vmeas. N, умноженное на коэффициент коррекции участка N, KN.
[0059] Коэффициент коррекции KN с участка N определяется с использованием ширины d участка N, средней глубины жидкости в участке N и математической модели, вычисляющей эти данные для расчета коэффициента коррекции KN.
[0060] Общая скорость потока реки представляет собой сумму всех отдельных скоростей потока на каждом участке: QTOT = QA + QB + QC + … QN.
[0061] На фиг. 13 и 14 показано применение, когда устройство (01) (дрон (02) и микроволновое устройство (03) для неинвазивного измерения) используется в подземных каналах или трубах (22). В зависимости от гидравлических условий и особенно уровня воды устройством можно управлять таким образом, чтобы выполнять несколько отдельных измерений на отдельных участках (A, B, C, … N) одинаковой ширины d или выполнять одно измерение в центре трубопровода над шириной D.
[0062] Если измерение выполняется на отдельных участках, то скорость потока для каждого участка N может быть рассчитана по уравнению неразрывности QN = VavgN * AN; где QN – скорость потока с участка N, VavgN – средняя скорость в участке N, и AN – площадь с участка N.
[0063] Средняя скорость участка N, VavgN, может быть рассчитана по измеренной поверхностной скорости на участке N, Vmeas. N, умноженное на коэффициент коррекции участка N, KN.
[0064] Коэффициент коррекции KN с участка N определяется с использованием ширины d участка N, средней глубины жидкости в участке N и математической модели, вычисляющей эти данные для расчета коэффициента коррекции KN.
[0065] К общей скорости потока в канале относится сумма всех отдельных скоростей потока на каждом участке: QTOT = QA + QB + QC + … QN.
[0066] Если только одно измерение выполняется в центре канала, то берется Vmeas на расстоянии D и умножается на коэффициент коррекции K для определения Vavg.
[0067] Коэффициент коррекции K определяется с использованием формы и размера канала, глубины воды и распределения скорости, представленного σ.
Математическая модель вычисляет эти данные и рассчитывает коэффициент коррекции K.
Q = Vavg. * A, где Q – скорость потока, Vavg. – средняя скорость в площади, омываемой водой, и A – поверхность из площади, омываемой водой.
[0068] В подземных каналах дрон (02) будет оснащен камерой и светом для облегчения пилотирования.
[0069] На фиг. 15 описан альтернативный способ, позволяющий избежать многих корректировок, вносимых в необработанную измеренную поверхностную скорость, который заключается в непрерывной регулировке 3D-перемещений устройства (03) для неинвазивного измерения с использованием 3 отдельных двигателей: двигателя (19) тангажа, двигателя (20) крена и двигателя (21) рыскания, чтобы противодействовать влиянию тангажа, крена и рыскания дрона.
| название | год | авторы | номер документа |
|---|---|---|---|
| БУКСИРУЕМЫЙ УЗЕЛ ДЛЯ ВОЗДУШНОГО СУДНА С НЕПОДВИЖНЫМ КРЫЛОМ ДЛЯ ГЕОФИЗИЧЕСКОЙ СЪЕМКИ | 2010 |
|
RU2529584C2 |
| УСТРОЙСТВО ДЛЯ ПОДВЕСКИ ПОЛЫХ УПРУГО-ДИНАМИЧЕСКИ-ПОДОБНЫХ МОДЕЛЕЙ КРЫЛАТЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В АЭРОДИНАМИЧЕСКИХ ТРУБАХ | 1972 |
|
SU1840314A1 |
| Способ оценки пространственного и углового положения объекта | 2024 |
|
RU2831368C1 |
| СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА С УПРУГИМИ ВЫНОСНЫМИ ЭЛЕМЕНТАМИ | 1992 |
|
RU2020112C1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2020113C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО КАРТЕ ВЫСОТ МЕСТНОСТИ И СИСТЕМА НАВИГАЦИИ, ИСПОЛЬЗУЮЩАЯ СПОСОБ | 2016 |
|
RU2654955C2 |
| СИСТЕМА И СПОСОБЫ УПРАВЛЕНИЯ С ПОМОЩЬЮ АВТОПИЛОТА | 2013 |
|
RU2623792C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| АВТОПИЛОТ | 2013 |
|
RU2619675C2 |
| Способ коррекции углов ориентации ЛА по сигналам от одноантенной СНС | 2022 |
|
RU2790081C1 |








Настоящее изобретение относится к неинвазивному микроволновому измерительному устройству (01) для расчета расхода потока жидкости, причем устройство (01) содержит: микроволновое устройство (03) для неинвазивного измерения скорости жидкости, содержащее полосковую антенну или рупорную антенну для генерирования микроволнового сигнала (14), который передается под определенным углом α наклона по направлению к поверхности (16) жидкости, и для приема отраженного микроволнового сигнала (15) от поверхности (16) жидкости с доплеровским сдвигом частоты; дрон (02), к которому подвешено устройство (03) для измерения с помощью системы (04) подвески, причем указанная система (04) подвески устраняет вибрационный шум, производимый дроном (02); по меньшей мере один датчик вибрации для устранения ложных показаний скорости; по меньшей мере один датчик угла для введения поправки на тангаж, крен и рыскание от дрона (02), которые влияют на измерение поверхностной скорости жидкости. Также настоящее решение относится к способу измерения скорости потока с использованием микроволнового устройства для неинвазивного измерения скорости жидкости. Технический результат – предоставление усовершенствованного неинвазивного способа и устройства для измерения расхода реки, открытого канала или жидкости, текущей в трубе или канале, когда для последнего доступ оператора к месту измерения затруднен, невозможен или опасен или просто необходимо избежать входа в осложненное ограниченное пространство. 2 н. и 12 з.п. ф-лы, 15 ил.
1. Неинвазивное микроволновое измерительное устройство (01) для расчета расхода жидкости, причем устройство (01) содержит:
- микроволновое устройство (03) для неинвазивного измерения скорости жидкости, содержащее полосковую антенну или рупорную антенну для генерирования микроволнового сигнала (14), который передается под определенным углом α наклона по направлению к поверхности (16) жидкости, и для приема отраженного микроволнового сигнала (15) от поверхности (16) жидкости с доплеровским сдвигом частоты;
- дрон (02), к которому подвешено устройство (03) для измерения с помощью системы (04) подвески, причем указанная система (04) подвески устраняет вибрационный шум, производимый дроном (02);
- по меньшей мере один датчик вибрации для выявления и устранения ложных показаний скорости, вызываемых дроном (02);
- по меньшей мере один датчик угла для введения поправки на тангаж, крен и рыскание от дрона (02), которые влияют на измерение поверхностной скорости жидкости, и определения конечного угла от устройства (03) для измерения по направлению к поверхности (16) жидкости.
2. Устройство (01) по п.1, отличающееся тем, что микроволновое устройство (03) для неинвазивного измерения скорости жидкости содержит 3D-систему управления с тремя двигателями (19, 20 и 21), способными автоматически изменять положение микроволнового устройства (03) для неинвазивного измерения для введения поправки на тангаж, крен и рыскание дрона (03).
3. Устройство (01) по любому из предыдущих пунктов, отличающееся тем, что микроволновое устройство (03) для неинвазивного измерения скорости жидкости связано с интерфейсом (07), содержащим датчики GPS и датчики в виде альтиметров.
4. Устройство (01) по любому из предыдущих пунктов, отличающееся тем, что микроволновое устройство (03) для неинвазивного измерения скорости жидкости связано с интерфейсом (07) для получения данных GPS и альтиметра с дрона (02).
5. Устройство (01) по любому из предыдущих пунктов, отличающееся тем, что оно содержит камеру и свет для облегчения пилотирования, особенно в подземных трубах и каналах (22).
6. Устройство (01) по любому из предыдущих пунктов, отличающееся тем, что микроволновое устройство (03) для неинвазивного измерения скорости жидкости содержит записывающее устройство для записи изображений или видео вместе с измеренными значениями скорости жидкости и/или данными GPS и альтиметра.
7. Устройство (01) по любому из предыдущих пунктов, отличающееся тем, что микроволновое устройство (03) для неинвазивного измерения скорости жидкости содержит устройство (05) измерения уровня или расстояния и/или устройство (06) измерения скорости и направления ветра.
8. Устройство (01) по любому из предыдущих пунктов, отличающееся тем, что система (04) подвески содержит по меньшей мере три трубки (08), соединенные друг с другом путями (09), причем трубки (08) соединяют устройство (03) для измерения скорости с дроном (02), причем устройство (03) для измерения скорости прикреплено к первому концу трубок (08), а дрон (02) прикреплен ко второму концу трубок (08).
9. Устройство (01) по п.8, отличающееся тем, что по меньшей мере три трубки (08) имеют разную длину, чтобы обеспечить угол для устройства (03) для измерения относительно поверхности (16) жидкости в виде воды и горизонтальной плоскости дрона (02), угол, который измеряется по меньшей мере одним датчиком угла.
10. Устройство (01) по п.8 или 9, отличающееся тем, что эластичные тросы (10) предусмотрены в трубках (08) и используются для подвешивания устройства (03) для измерения, причем верхний конец эластичных тросов (10) соединен с системой (04) подвески, прикрепленной к дрону (02), а нижний конец эластичных тросов (10) прикреплен к устройству (03) для измерения, причем нижний конец эластичных тросов (10) не имеет трубок (08) и немного длиннее трубок (08).
11. Устройство (01) по п.10, отличающееся тем, что упругость эластичных тросов (10) выбрана таким образом, чтобы поглощать нежелательные вибрации, причем вертикальные перемещения устройства (03) для измерения остаются незначительными.
12. Устройство (01) по любому из пп.1-7, отличающееся тем, что система (04) подвески содержит жесткую верхнюю пластину (11), соединенную с дроном (02), и жесткую нижнюю пластину (12), соединенную с устройством (03) для неинвазивного измерения, при этом верхняя пластина (11) и нижняя пластина (12) соединены с демпферами (13) в виде амортизирующего блока.
13. Неинвазивный способ измерения величины скорости и распределения жидкости (16), текущей в трубе или канале (22), или в реке, или открытом канале, причем в способе используют микроволновое устройство (03) для неинвазивного измерения скорости жидкости, подвешенное к дрону (02) и содержащее по меньшей мере один датчик вибрации, причем указанный способ включает этапы:
a) генерирования микроволновых сигналов (14) с использованием полосковой антенны или рупорной антенны;
b) приема отраженных микроволновых сигналов (15) от поверхности (16) текущей жидкости;
c) генерирования ряда дискретных данных, выраженных в амплитуде как функции времени, из сгенерированных микроволновых сигналов и отраженных микроволновых сигналов с доплеровскими сдвигами частоты;
d) преобразования спектра данных, выраженных во временной области, в область частоты посредством преобразования Фурье, чтобы соответствовать первой кривой Гаусса;
e) определения по первой кривой Гаусса общей измеренной скорости как основного μ и общего распределения скорости как стандартного отклонения σ;
f) измерения механических вибраций дрона на этапе (a) генерирования и этапе (b) приема сигналов для определения последовательности данных вибрации, измеряемых датчиком вибрации;
g) генерирования из данных вибрации ряда дискретных данных, выраженных в амплитуде как функции времени;
h) преобразования спектра данных вибрации, выраженных во временной области, в область частоты посредством преобразования Фурье, чтобы соответствовать второй кривой Гаусса;
i) определения по второй кривой Гаусса измеренной скорости, вызываемой вибрацией, как средней величины μ и распределения скорости, вызываемой вибрацией, как стандартного отклонения σ;
j) применения коррекции к общей измеренной скорости и общему распределению скорости, полученных на этапе (e), путем вычитания измеренной скорости, вызываемой вибрацией, и распределения скорости, вызываемого вибрацией, полученных на этапе (j), чтобы исключить вибрации дрона (02) при расчете фактической величины скорости и распределения фактической скорости жидкости.
14. Способ по п.13, отличающийся тем, что поверхностную скорость жидкости определяют по сгенерированным микроволновым сигналам и отраженным микроволновым сигналам с доплеровскими сдвигами частоты и вводят поправку на тангаж, крен и рыскание от дрона (02) путем учета данных, измеренных по меньшей мере одним датчиком угла.
| US 20180003531 A1, 04.01.2018 | |||
| US 20190086247 A1, 21.03.2019 | |||
| US 2005018882 A1, 27.01.2005 | |||
| US 9341581 B2, 17.05.2016. |

