Изобретение относится к области судостроения и касается вопросов создания средств для осуществления подводных транспортных операций, например для транспортировки подводных технологических средств разведки, обустройства и эксплуатации морских месторождений полезных ископаемых, необходимых расходных материалов и т.д.
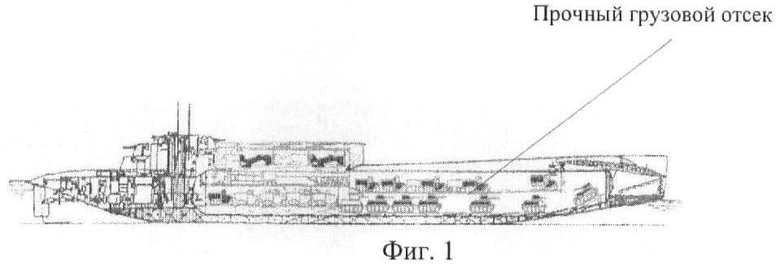
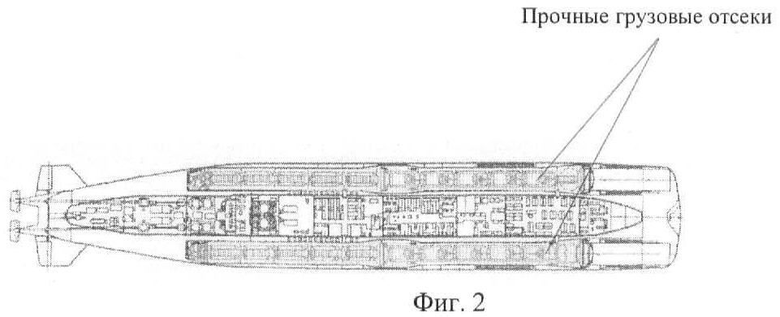
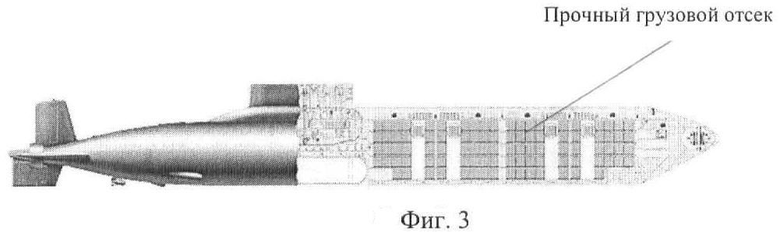
Известны подводные транспортные средства типа подводных лодок. На Фиг.1 и 2 показаны примеры известных проектов транспортных подводных лодок проектов 621 и 748 соответственно (см. Отечественные подводные лодки. Проектирование и строительство, ред. академик РАН В.М.Пашин, ЦНИИ им. акад. А.Н.Крылова, Санкт-Петербург, 2004 г.), а также на основе проекта 941 (Фиг.3)).
Экономическая целесообразность и конкурентоспособность подводных транспортных систем для осуществления магистральных грузовых перевозок на данный момент не подтверждена. Ни один из известных проектов в настоящее время не реализован. В настоящее время потребность в развертывании технологий добычи полезных ископаемых, в частности углеводородов, на арктическом шельфе и в других ледовитых акваториях создает новые предпосылки для развития подводных транспортных средств.
Принципиальные отличия новых технических средств от упомянутых прототипов связаны со спецификой технологий ведения промысловой деятельности в ледовитых морях. Предлагаемая подводная транспортная система в отличие от магистральных транспортных средств должна принадлежать классу многоцелевых транспортных систем.
Применение подводных транспортных средств совместно с другими подводными технологиями промысла полезных ископаемых может снять ограничения, влияющие на стратегию, способы освоения и эксплуатации морских месторождений, связанные с природно-климатическими условиями ледовитых акваторий. Важнейшие из этих ограничений связаны с цикличностью и продолжительностью межледовых периодов, параметрами ледового покрова, его подвижностью и т.д.
Известна транспортная подводная система, состоящая из одного самоходного подводного судна - подводной лодки с управляемой балластной системой, прочными цистернами постоянного водоизмещения, размещенными в ее корпусе, имеющего проницаемый наружный корпус, энергетическую установку, движительно-рулевой комплекс и распложенный в ее корпусе непроницаемый прочный корпус, в котором размещен блок управления механизмами и системами подводного судна (см. там же) - прототип (на фиг.2).
Основные недостатки прототипа состоят в следующем:
- Эффективное применение подводной лодки в качестве транспортного средства возможно лишь тогда, когда масса перевозимого полезного груза находится в узком диапазоне, а состав и характеристики груза практически не изменяются на протяжении всего жизненного цикла эксплуатации транспортной подводной лодки. В то же время реализация промысловых технологий требует транспортировки весьма широкой номенклатуры грузов;
- При размещении груза внутри прочного корпуса возникает проблема обеспечения герметичности больших закрытий грузовых отсеков и ограничения по габаритным размерам объектов транспортировки;
- Размещение полезной нагрузки внутри прочного корпуса подводной лодки практически исключает возможность ее выгрузки в подводном положении. Очевидно, что такой способ размещения груза на борту транспортной подводной лодки не имеет смысла для объектов, которые предназначены для длительной автономной работы под водой;
- Размещение полезной нагрузки внутри прочного корпуса также приводит к тому, что допустимая глубина транспортировки и габариты полезной нагрузки взаимно ограничивают друг друга. Чем больше габарит транспортируемого груза, тем меньше (при прочих равных условиях) рабочая глубина погружения транспортной подводной лодки;
- В рамках подводной промысловой технологии неизбежно проявятся указанные и другие негативные свойства подводных лодок, что, в конечном счете, приведет к снижению эффективности системы подводных промысловых технологий в целом. Так, например, очевидно, что отсутствие возможности выгрузки в подводном положении требует создания некой плавучей перевалочной базы вблизи пункта назначения груза, что в значительной мере лишает смысла сам принцип подводной транспортировки. Ограничение по габаритам перевозимого груза, определяемое реальной удельной прочностью корпусных материалов подводных лодок, потребует создания дополнительных технологий для сборки крупногабаритных подводных промысловых объектов на месте из отдельных модулей. С учетом реально достижимых габаритов прочного корпуса транспортной подводной лодки (примерно 10-11 м) число модулей, которые необходимо доставить и собрать, может оказаться достаточно большим, если учесть, что габариты подводных добычных комплексов могут быть значительно больше 10 метров. По той же причине увеличиваются затраты на обустройство месторождения из-за многократного увеличения транспортных операций и т.д.
Задачей предлагаемого изобретения является создание подводной транспортной системы, позволяющей обеспечить универсальность, эффективность и безопасность транспортировки подводных объектов, включая крупногабаритные, в условиях полного оледенения акватории, а также сокращение затрат времени и энергии на транспортировку грузов в процессе функционирования подводной транспортной системы.
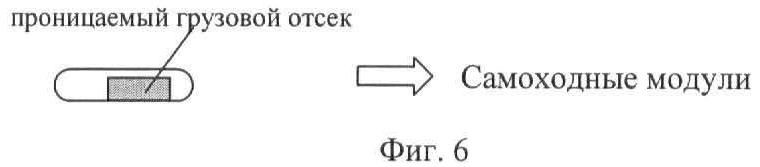
Для достижения указанного технического результата в подводной транспортной системе, состоящей, по меньшей мере, из одного самоходного подводного судна, преимущественно в виде подводной лодки, с управляемой балластной системой, прочными цистернами постоянного водоизмещения, проницаемым наружным корпусом, энергетической установкой, движительно-рулевым комплексом и, по меньшей мере, одним непроницаемым прочным корпусом, в одном из которых размещен блок управления механизмами и системами подводного судна по изобретению, по меньшей мере, одно судно транспортной системы представляет собой самоходное подводное модульное судно, состоящее из главного модуля и, по меньшей мере, одного вспомогательного модуля, при этом все модули судна представляют собой функционально и конструктивно совместимые самоходные подводные суда, проницаемый наружный корпус которых выполнен несущим и оснащен однотипными силовыми элементами, предназначенными для взаимной жесткой и прочной фиксации модулей относительно друг друга, а также однотипными управляемыми захватами, функционально совместимыми с указанными силовыми элементами, а внутри несущего проницаемого корпуса имеется, по меньшей мере, один проницаемый грузовой отсек, оснащенный упомянутыми управляемыми захватами, и, при этом, по меньшей мере, один из грузовых отсеков главного модуля судна выполнен так, чтобы в нем мог быть размещен, по меньшей мере, один из остальных модулей судна, а каждый модуль оснащен коммутирующими устройствами, соединенными через соответствующую арматуру с энергетической установкой и блоком управления и имеющими герметичные подводные разъемы, для подключения извне к энергетической установке и блоку управления модуля.
Для случаев, когда выполнение подводной операции требует присутствия оператора непосредственно в зоне проведения технологических действий и эти зоны представляют собой группу объектов, удаленную на значительное расстояние от берегов акватории, что типично для подводных месторождений на шельфе, у подводной транспортной системы главный и, по меньшей мере, один вспомогательный модули судна оснащены стыковочными шлюзовыми устройствами для временного объединения внутренних полостей непроницаемых прочных корпусов главного и вспомогательных модулей судна.
Для доставки полезной нагрузки и/или проведения работ одновременно в нескольких точках на дне акватории, когда точки распределены по значительной территории у подводной транспортной системы, самоходные модули судна выполнены автономными.
Для доставки полезной нагрузки и/или проведения работ, не требующих больших энергозатрат, одновременно в нескольких точках дна акватории, когда точки расположены близко друг от друга у подводной транспортной системы, по меньшей мере, один модуль самоходного подводного модульного судна оснащен кабельным устройством, соединенным с блоком управления модуля и кабелем с подводным разъемом для подключения к коммутирующим устройствам других модулей.
Для доставки полезной нагрузки и/или проведения работ, требующих больших энергозатрат, одновременно в нескольких точках на дне акватории, когда точки распределены близко друг к другу, например при обслуживании двух соседних кустов подводных скважин, кабельное устройство также соединено с энергетической установкой модуля.
Для доставки полезных нагрузок, которые невозможно разместить в грузовых отсеках самоходных модулей, предлагается подводная транспортная система, которая дополнительно включает, по меньшей мере, одно несамоходное подводные судно с несущим проницаемым наружным корпусом, в котором имеются силовые элементы, для прочной взаимной фиксации с модулями самоходного подводного модульного судна при помощи управляемых захватов самоходных модулей, и с проницаемым грузовым отсеком, оснащенным управляемыми захватами, кроме того, судно оснащено прочными конструктивными элементами постоянной плавучести для компенсации веса его конструкций под водой, управляемой балластной системой, включающей легкие балластные цистерны с открытым кингстоном и прочные цистерны постоянного водоизмещения, а также соединенными через соответствующую арматуру с управляемой балластной системой и управляемыми захватами несамоходного судна, подводными разъемами для подключения к энергетической установке и блоку управления самоходных модулей через их коммутирующее устройство.
Преимущества, которые обеспечивает предлагаемая подводная транспортная система, в основном, могут состоять в следующем:
- Наличие в составе системы трех типов судов (подводных лодок, самоходных подводных модульных судов и несамоходных подводных судов) значительно повышает функциональные возможности транспортной системы в рамках системы технологий, обеспечивающей промысловую деятельность на шельфе. В частности, появляется возможность универсализации и специализации действия подводной транспортной системы. Например, традиционные подводные лодки, входящие в состав системы, могут выполнять задачи по освещению подводной обстановки по пути следования модульных подводных судов и в районе их разгрузки или проведения технологических операций, на подводные лодки может быть возложена функция обеспечения безопасности и т.д.;
- Распределение функций между основными средствами системы более адекватно характеру и основным стратегиям развития освоения подводных месторождений на шельфе. В то же время, предлагаемая система наиболее приспособлена для адаптивных трансформаций ее структуры и функции в плане взаимодействия с развивающимися промысловыми технологиями. А именно при любом развитии подводных промысловых технологий в ледовитых акваториях неизменной остается потребность в обеспечении собственно перемещения на малые и средние дистанции (порядка 10-100 км) грузов и технологического оборудования. Эту неизменную функцию в предлагаемой системе покрывают главные модули самоходных подводных модульных судов. Размеры главного модуля судна допускают размещение в его грузовом отсеке, по меньшей мере, одного вспомогательного модуля и, таким образом, способность главного модуля перемещаться на значительные расстояния распространяется на все вспомогательные модули системы. Функция главного модуля и, соответственно, его технический облик, таким образом, слабо зависят от возможных изменений в стратегии и технологиях освоения ледовитых акваторий. С другой стороны, возможные трансформации подводной транспортной системы, обусловленные неизбежным развитием подводных промысловых технологий, при реализации предлагаемой структуры системы оказываются сосредоточенными на уровне более мелких и специализированных вспомогательных модулей системы. Таким образом, предлагаемое техническое решение создает необходимые предпосылки для снижения затрат на выполнение новых видов работ и модернизацию системы в целом;
- Использование проницаемых грузовых отсеков практически снимает ограничения на диапазон рабочих глубин для подводной транспортной системы, так как существующие технологии обеспечивают создание прочных корпусов ограниченных размеров для работы, практически, в любой точке мирового океана;
- Размещение одного или нескольких модулей системы в грузовом отсеке главного модуля позволяет существенно снизить общее энергопотребление системы и понизить общие затраты на поддержание энергетического цикла транспортной системы (что особенно важно с учетом высокой вероятности использования ядерных энергетических установок в условиях арктических морей);
- Оснащение модулей системы коммутирующими устройствами, герметичными разъемами и шлюзовыми устройствами для временного объединения внутренних полостей прочных корпусов модулей позволяет повысить надежность функционирования системы, улучшить условия обитаемости относительно небольших вспомогательных модулей, обеспечить восстановление энергетических ресурсов вспомогательных модулей, увеличить пространство грузовых отсеков вспомогательных модулей для транспортировки габаритных полезных нагрузок, повысив их транспортную эффективность и т.д.;
- Наличие двух и более вспомогательных модулей обеспечивает одновременное выполнение различных подводных работ за один рейс самоходного подводного модульного судна;
- Наличие в составе системы подводных лодок, а также двух и более модулей в составе самоходного подводного модульного судна повышает безопасность функционирования системы за счет дублирования функций и возможности использования одного или нескольких модулей в качестве спасательных аппаратов, в случае необходимости;
- Выполнение модулей в виде автономных подводных аппаратов позволяет значительно расширить область транспортного обеспечения в процессе выполнения подводных работ;
- Оснащение модулей системы соединительным кабелем для объединения блоков управления модулей позволяет обеспечить совместное управление модулями в процессе проведения подводных работ, а также обеспечить управляемость при транспортировке негабаритных грузов и специализированных комплексов технологического оборудования с помощью несамоходного подводного судна;
- Оснащение модулей соединительными кабелями для передачи электроэнергии позволяет увеличить весовой КПД вспомогательных модулей за счет уменьшения массы их собственной энергетической системы, а также увеличить энерговооруженность и время работы вспомогательных модулей за счет использования энергетических ресурсов главного модуля системы. В частности, это расширяет возможности применения автоматических подводных буровых установок и т.д.;
- Наличие в составе системы несамоходных модулей, которые могут функционировать как подводные транспортные и технологические платформы, позволяет транспортировать негабаритные грузы, например подводные добычные комплексы или их крупные блоки, размещение которых невозможно в грузовом отсеке главного модуля системы;
- Наличие у несамоходного судна несущего проницаемого наружного корпуса позволяет минимизировать потери энергии при транспортировке негабаритных грузов за счет придания корпусу обтекаемой формы. Кроме того, в тех случаях, когда габаритные размеры пространства, занятого полезной нагрузкой, например технологическим оборудованием, определяются не его собственными размерами, а необходимым технологическим пространством, проницаемый корпус несамоходного судна функционирует как конструктивная база, необходимая для точного взаимного расположения исполнительного технологического оборудования. В частности, такая необходимость возникает при выполнении операций по замене дефектного участка подводного трубопровода, когда расстояние между компактными труборезными машинами и другим технологическим оборудованием определяется длиной заменяемого участка трубопровода и т.д.
Сущность изобретения поясняется рисунками, где на Фиг.4-10 представлены основные элементы подводной транспортной системы и примеры ее возможных конфигураций при транспортировке различных полезных нагрузок. На рисунках Фиг.11-14 представлены схемы основных средств подводной транспортной системы.
Подводная транспортная система Фиг.11 состоит, по меньшей мере, из одного самоходного подводного судна 1, преимущественно в виде подводной лодки, с управляемой балластной системой 2, включающей прочные цистерны постоянного водоизмещения 3, проницаемым наружным корпусом 4, энергетической установкой 5, движительно-рулевым комплексом 6 и размещенным в корпусе 4, по меньшей мере, одним непроницаемым прочным корпусом 7, в одном из которых размещен блок управления 8 механизмами и системами подводного судна. Кроме того, система включает, по меньшей мере, одно самоходное подводное модульное судно, состоящее из главного модуля 9 и, по меньшей мере, одного вспомогательного модуля 10. При этом все модули судна представляют собой функционально и конструктивно совместимые самоходные подводные суда, проницаемый наружный корпус которых выполнен несущим и оснащен однотипными силовыми элементами 11, предназначенными для взаимной жесткой и прочной фиксации модулей относительно друг друга, а также однотипными управляемыми захватами 12, функционально совместимыми с указанными силовыми элементами 11, а внутри несущего проницаемого корпуса имеется, по меньшей мере, один проницаемый грузовой отсек 13, оснащенный упомянутыми управляемыми захватами 12, и, при этом, по меньшей мере, один из грузовых отсеков 13 главного модуля 9 судна выполнен так, чтобы в нем мог быть размещен, по меньшей мере, один из остальных модулей судна, а каждый модуль оснащен коммутирующими устройствами 14, соединенными через соответствующую арматуру с энергетической установкой 5 и блоком управления 8 и имеющими герметичные подводные разъемы 15, для подключения извне к энергетической установке 5 и блоку управления 8 модуля.
У подводной транспортной системы Фиг.12 главный модуль 9 и, по меньшей мере, один вспомогательный модуль 10 судна оснащены стыковочными шлюзовыми устройствами 16 для временного объединения внутренних полостей непроницаемых прочных корпусов 7 главного 9 и вспомогательных 10 модулей судна.
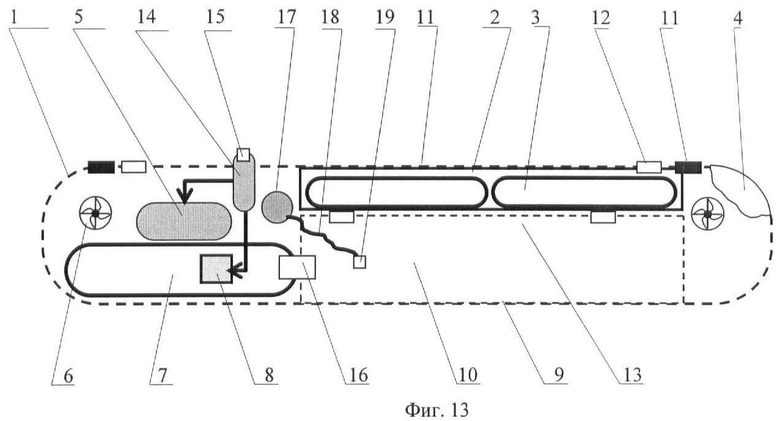
У подводной транспортной системы Фиг.13, по меньшей мере, один модуль самоходного подводного модульного судна оснащен кабельным устройством 17, соединенным с блоком управления модуля 8 и кабелем 18 с подводным разъемом 19 для подключения к коммутирующим устройствам 14 других модулей.
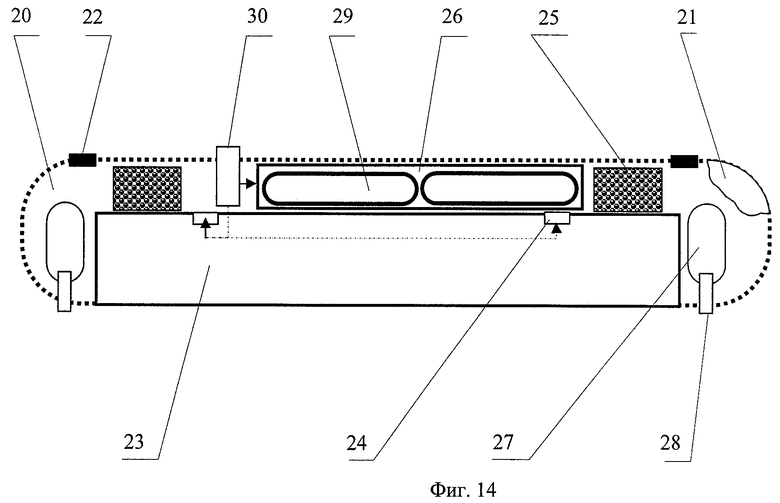
Подводная транспортная система дополнительно включает (Фиг.14), по меньшей мере, одно несамоходное подводные судно 20 с несущим проницаемым наружным корпусом 21, в котором имеются силовые элементы 22, для прочной взаимной фиксации с модулями самоходного подводного модульного судна при помощи управляемых самоходных модулей, и с проницаемым грузовым отсеком 23, оснащенным управляемыми захватами 24, кроме того, судно оснащено прочными конструктивными элементами постоянной плавучести 25 для компенсации веса его конструкций под водой, управляемой балластной системой 26, включающей легкие балластные цистерны 27 с открытым кингстоном 28 и прочные цистерны 29 постоянного водоизмещения, а также соединенными через соответствующую арматуру с управляемой балластной системой 26 и управляемыми захватами 24 несамоходного судна, подводными разъемами 30 для подключения к энергетической установке и блоку управления самоходных модулей через их коммутирующее устройство.
Функционирование транспортной системы осуществляется следующим образом.
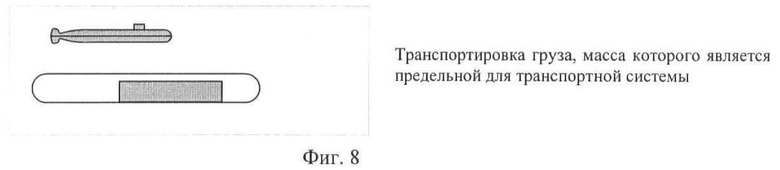
При транспортировки груза, масса которого является предельной для транспортной системы, используется конфигурация Фиг.8, включающая подводные лодки, главный модуль 9 (Фиг.11) самоходного подводного судна (далее, если не указано иное, ссылки на Фиг.11).
В исходном пункте транспортного маршрута с использованием любой доступной технологии транспортируемый груз размещают в грузовом отсеке 13 главного модуля 9 и фиксируют с помощью управляемых захватов 12. При этом, в случае осуществления этой операции в надводном положении прочные балластные цистерны 3 свободны от балластной жидкости и компенсируют веса груза. После закрепления груза главный модуль, при необходимости, переходит в подводное положение.
В том случае если погрузка производится в подводном положении (например, когда осуществляется погрузка подводного технологического оборудования, предварительно размещенного на подводной погрузочной площадке), прочные балластные цистерны 3 модуля полностью заполнены балластом, при этом движительно-рулевой комплекс 6, блок управления 8 и энергетическая установка 5 и управляемая балластная система 2 обеспечивают функционирование модуля в режиме подводной лодки.
Далее, при подводном положении модуля, с помощью балластной системы 2, регулируя степень заполнения балластных цистерн 3, модуль приводят в уравновешенное состояние, при котором в отношении гидростатических параметров он приобретает все свойства подводной лодки.
После выполнения указанных операций модуль, используя собственную энергетическую установку 5, движительно-рулевой комплекс 6 и блок управления 8, следует, при необходимости, в сопровождении подводной лодки (см. рисунок 2) в направлении точки выгрузки.
По достижении заданной точки, модуль, используя собственный движительно-рулевой комплекс 6, зависает без хода на необходимой высоте над местом выгрузки, а затем в режиме подводной лодки без хода снижается вплоть до касания с площадкой для разгрузки.
По достижении стабильного контакта с площадкой, в том числе, за счет частичного заполнения балластных цистерн 3 и работы движительно-рулевого комплекса 6, происходит полное заполнение балластных цистерн 3. При этом вес груза полностью передается на разгрузочную площадку, а собственная плавучесть модуля становится равной нулю. Затем с помощью управляемых захватов грузового отсека 12 груз опускают на разгрузочную площадку, после чего управляемые захваты 12 выходят из контакта с конструктивными элементами груза, предназначенными для транспортных операций с ним, например рымами.
Далее, в режиме подводной лодки используя движительно-рулевой комплекс 6, без хода модуль поднимается на безопасную высоту над грузом, находящимся на площадке, и осуществляет переход к новой точке загрузки или в пункт базирования.
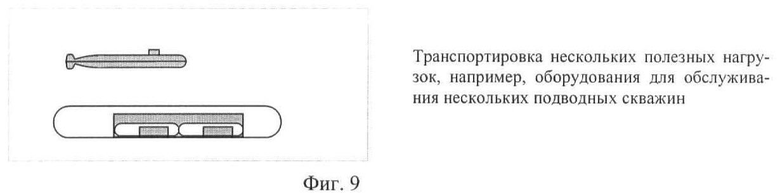
При транспортировке нескольких полезных нагрузок, например оборудования для обслуживания нескольких подводных скважин одного куста, используется конфигурация системы Фиг.9, включающая подводные лодки и главный модуль 9 (далее, если не указано иное, ссылки на Фиг.12) с расположенными в его грузовом отсеке 13 вспомогательными модулями 10.
В исходном пункте транспортного маршрута в грузовых отсеках вспомогательных модулей 10 размещают и фиксируют полезную нагрузку. Операция выполняется так же, как это описано выше для главного модуля самоходного модульного судна.
После фиксации груза в грузовых отсеках вспомогательных модулей с помощью управляемых захватов 12 модули 10, двигаясь в режиме подводной лодки с использованием собственной энергетической установки 5, движительно-рулевого комплекса 6 и блока управления 8 входят в грузовой отсек 13 главного модуля 9 подводного судна 1. При этом силовые элементы 11, размещенные на проницаемом наружном корпусе 4 вспомогательных молей 10, входят в контакт с управляемыми захватами 12 грузового отсека 13 главного модуля 9. Происходит взаимная фиксация главного и вспомогательных модулей.
С помощь коммутирующих устройств 14 и разъемов 15 происходит объединение блоков управления 8 и энергетических установок 5 всех модулей самоходного модульного судна 1. При использовании обитаемых вспомогательных модулей с помощью стыковочных шлюзовых устройств 16 объединяют также внутренние полости прочных корпусов 7 всех модулей судна.
После этого самоходное подводное модульное судно 1 следует, в случае необходимости, в сопровождении подводной лодки в направлении точки доставки груза.
По достижении заданной точки модульное судно 1 зависает на необходимой высоте и на безопасном расстоянии от места проведения работ или разгрузки вспомогательных модулей (что может оказаться необходимым на мелководье, где не может функционировать главный модуль).
Далее, если вспомогательные модули представляют собой автономные подводные суда, происходит разобщение всех систем и внутренних полостей прочных корпусов модулей судна. Если модули представляют собой привязные подводные суда (см. п.3 и 4 формулы), то с помощью стыковочных шлюзовых устройств 16 происходит разобщение только внутренних полостей прочных корпусов вспомогательных 10 и главного 9 модулей судна. Затем после срабатывания по команде блока управления 8 захватных устройств 12 происходит размыкание конструктивной связи вспомогательных 10 и основного 9 модулей судна 1.
Далее вспомогательные модули 10 с использованием собственного движительно-рулевого комплекса 6 выходят из грузового отсека 13 главного модуля 9 модульного судна 1 и приближаются к площадкам для разгрузки груза или к обслуживаемым подводным объектам, вплоть до касания.
После достижения необходимой стабильности пространственного положения вспомогательных модулей 10 происходит заполнение их прочных балластных цистерн 3 до необходимой степени, вплоть до полного заполнения. При этом, в случае разгрузки вес груза передается на разгрузочную площадку, а при проведении обслуживания вспомогательный модуль приобретает отрицательную плавучесть, которая обеспечивает его устойчивое положение на обслуживаемом объекте.
После этого, в случае выгрузки, вспомогательный модуль 10, используя движительно-рулевой комплекс 6 в режиме подводной лодки без хода, поднимается на безопасную высоту и возвращается в грузовой отсек 13 главного модуля 9 модульного судна 1. В случае проведения работ по обслуживанию (без выгрузки технологического оборудования) вспомогательный модуль с помощью балластной системы 2 откачивает балласт из цистерн 3, вновь приобретает нулевую плавучесть и в режиме подводной лодки также возвращается в грузовой отсек 13 главного модуля 9 модульного судна 1.
Далее с использованием управляемых захватов 12 грузового отсека 13 главного модуля 9 происходит взаимная фиксация модулей судна. Затем с помощью коммутирующих устройств 14, герметичных разъемов 15 и, при необходимости, шлюзовых устройств 16 происходит объединение внутренних полостей прочных корпусов 7, энергетических установок 5 и блоков управления 8 главного 9 и вспомогательных 10 модулей модульного судна 1. После этого судно осуществляет переход к новой точке проведения работ или к пункту базирования.
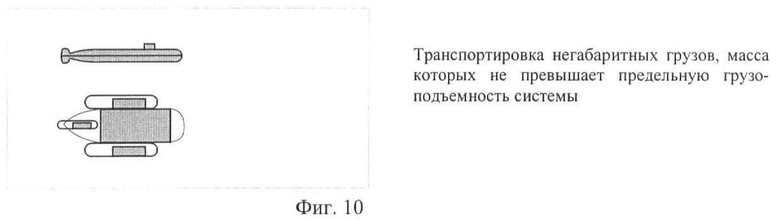
При транспортировке негабаритных грузов, масса которых не превышает предельную грузоподъемность системы, используется конфигурация системы Фиг.10, включающая несамоходное подводное судно Фиг.7, главные 9 (Фиг.11) или вспомогательные 10 (Фиг.11) модули самоходного подводного модульного судна 1 (Фиг.11) и подводные лодки Фиг.4 (далее, если не указано иное, ссылки на Фиг.14).
В исходном пункте транспортного маршрута, с использованием необходимой технологии, в грузовом отсеке несамоходного суда 20 транспортируемый груз размещают и фиксируют с помощью управляемых захватных устройств 24 в грузовом отсеке 23 несамоходного судна 20. При этом управление балластной системой 26 и захватами 24 осуществляют за счет энергии и управляющих сигналов, поступающих по кабелям извне с береговой базы или плавучей платформы через подводный разъем 30. В случае осуществления этой операции в надводном положении прочные балластные цистерны 29 не содержат балластной жидкости, а легкие балластные цистерны 27 полностью продуты с помощью управляемой балластной системы 26. В том случае, если операция производится в подводном положении, прочные балластные цистерны 29 и легкие цистерны 27 заполнены водой, а нулевая плавучесть и статическое равновесие несамоходного судна 20 обеспечиваются с помощью прочных конструктивных элементов постоянной плавучести 25 и минимально необходимого свободного объема прочных балластных цистерн 29, создаваемого с помощью управляемой балластной системы 26.
После фиксации груза с помощью управляемых захватов 24 в грузовом отсеке 23 несамоходного судна 20 его, при необходимости, переводят в подводное положение путем заполнения легких цистерн 27 с помощью управляемой балластной системы 26.
Далее с помощью управляемой балластной системы 26 путем регулирования степени заполнения прочных балластных цистерн 29 несамоходное судно 20 с закрепленном в его отсеке 23 грузом приводят в состояние статического равновесия.
Избранные для проведения транспортной операции самоходные модули судна 1 (Фиг.11) с помощью собственных движительно-рулевых комплексов 6 (Фиг.11) в режиме подводной лодки приближаются к находящемуся в подводном положении несамоходному судну 20. Затем самоходные модули с помощью собственных управляемых захватов 12 (Фиг.11) через силовые элементы 22 временно прочно соединяются с несамоходным судном 20.
Далее осуществляется подключение блоков управления 8 (Фиг.11) и энергетических установок 5 (Фиг.11) самоходных модулей подводной транспортной системы через герметичные разъемы 30 к захватным устройствам 24 и управляемой балластной системе 26 несамоходного судна 20.
С помощью управляемых балластных систем самоходных модулей 2 (Фиг.11) и аналогичной системы 26 несамоходного судна 20 сформированный составной объект, предпочтительным архитектурным типом которого является катамаран, без хода переводится в состояние статического равновесия.
Используя энергетические установки 5 (Фиг.11) самоходных модулей и, соответственно, их движительно-рулевые комплексы 6 (Фиг.11), а также блоки управления 8 (Фиг.11), катамаран Фиг.10 следует, при необходимости, в сопровождении подводной лодки в направлении точки доставки груза.
По достижении заданной точки катамаран, используя движительно-рулевые комплексы 6 (Фиг.11) самоходных модулей, зависает без хода на необходимой высоте над местом проведения выгрузки или проведения технологических работ. Затем в режиме движения подводной лодки без хода, также используя движительно-рулевые комплексы самоходных модулей, катамаран Фиг.10 опускается на площадку разгрузки.
Путем полного заполнение балластных цистерн 29 несамоходного судна 20 вес груза передается на разгрузочную площадку, а собственная плавучесть несамоходного судна 20 становится близкой к нулю. После этого по команде от блоков управления 8 (Фиг.11) самоходных модулей срабатывают управляемые захваты 24 несамоходного судна 20 и с их помощью груз опускают на разгрузочную площадку. После этого захваты 24 выходят из контакта с конструктивными элементами, предназначенными для транспортных операций с транспортируемым объектом (например, с рымами).
При необходимости, самоходные модули с помощью собственных управляемых балластных систем 2 (Фиг.11) приводятся в статическое равновесие при нулевой плавучести.
Затем, используя управляемую балластную систему 26, путем регулирования степени заполнения прочных цистерн постоянного водоизмещения 29, несамоходное судно 20 также приводится в состояние статического равновесия при нулевой плавучести.
С помощью движительно-рулевых комплексов 6 (Фиг.11) самоходных модулей по командам блока управления 8 (Фиг.11) происходит подъем катамарана на безопасную высоту над площадкой разгрузки и катамаран следует либо в направлении точки новой загрузки, либо в пункт базирования. Там по команде от блоков управления 8 (Фиг.11) самоходных модулей катамарана с помощью управляемой балластной системы 26 происходит продувка легких балластных цистерн 27. Балласт свободно выходит через открытые кингстоны 28 и катамаран переходит в надводное положение.
Далее, по команде от блоков управления 8 (Фиг.11) самоходных модулей происходит срабатывание управляемых захватов 12 (Фиг.11) и устраняется конструктивная связь между самоходными модулями подводной транспортной системы и несамоходным судном 20, после чего разъединяются разъемы 30.
Затем самоходные модули с использованием собственных управляемых балластных систем 2 (Фиг.11), движительно-рулевых комплексов 6 (Фиг.11) и блоков управления 8 (Фиг.11) выходят из механического контакта с несамоходным судном и могут быть использованы по другим назначениям.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДОБЫЧИ И ТРАНСПОРТИРОВКИ ГАЗОВЫХ ГИДРАТОВ ДОННЫХ ОТЛОЖЕНИЙ И ПОДВОДНАЯ ЛОДКА ДЛЯ ДОБЫЧИ И ТРАНСПОРТИРОВКИ ГАЗОВЫХ ГИДРАТОВ | 2014 |
|
RU2554374C1 |
| МОРСКОЕ ГРУЗОВОЕ СУДНО ДЛЯ ПОДЪЕМА, ПОГРУЗКИ-ВЫГРУЗКИ И ТРАНСПОРТИРОВКИ ЗАТОНУВШИХ ОБЪЕКТОВ В ПУНКТ ПРИЕМА | 2008 |
|
RU2377155C1 |
| Транспортировщик водолазов | 2021 |
|
RU2760757C1 |
| ПОДВОДНОЕ СУДНО ДЛЯ ОБСЛУЖИВАНИЯ ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ НА АРКТИЧЕСКОМ ШЕЛЬФЕ И ДРУГИХ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2016 |
|
RU2629625C1 |
| ВОЛНОСТОЙКИЙ САМОХОДНЫЙ КАТАМАРАННЫЙ КОМПЛЕКС | 2008 |
|
RU2398705C2 |
| МОРСКОЕ САМОХОДНОЕ САМОПОДЪЕМНОЕ КРАНОВОЕ СУДНО | 2015 |
|
RU2603423C1 |
| Сторожевой корабль | 2024 |
|
RU2834069C1 |
| СУДНО НАДВОДНОГО И ПОДВОДНОГО ХОДА | 2018 |
|
RU2700204C1 |
| КОМПЛЕКС ДЛЯ ПЕРЕВОЗКИ ГРУЗОВ СУДАМИ И СПОСОБ ФОРМИРОВАНИЯ ИЗ КОМПЛЕКСА ФЛОТА НА ЗАДАННЫЙ МАРШРУТ ГРУЗОПЕРЕВОЗКИ | 2009 |
|
RU2408494C1 |
| ПОДВОДНАЯ ГРУЗОВАЯ ЛОДКА | 1996 |
|
RU2115583C1 |



Изобретение относится к области судостроения и касается вопросов создания средств для осуществления подводных транспортных операций, например для транспортировки подводных технологических средств разведки, обустройства и эксплуатации морских месторождений полезных ископаемых, необходимых расходных материалов. Подводная транспортная система включает кроме подводных лодок самоходные подводные модульные суда. Модули самоходных судов однотипны, совместимы функционально и конструктивно между собой и представляют собой автономные или привязные самоходные подводные суда. При этом главный модуль системы всегда является автономным подводным судном. Транспортная система дополнительно может включить несамоходные подводные суда, движение которых и функционирование основных систем обеспечивается за счет самоходных модулей системы. Совместное функционирование основных средств системы обеспечивается за счет электрических и механических коммутирующих, силовых и шлюзовых конструктивных элементов. Предложенная подводная транспортная система позволяет обеспечить универсальность, эффективность и безопасность транспортировки крупногабаритных подводных объектов в условиях полного оледенения акватории, а также сократить затраты времени и расход энергии на транспортировку грузов под водой. 5 з.п. ф-лы, 14 ил.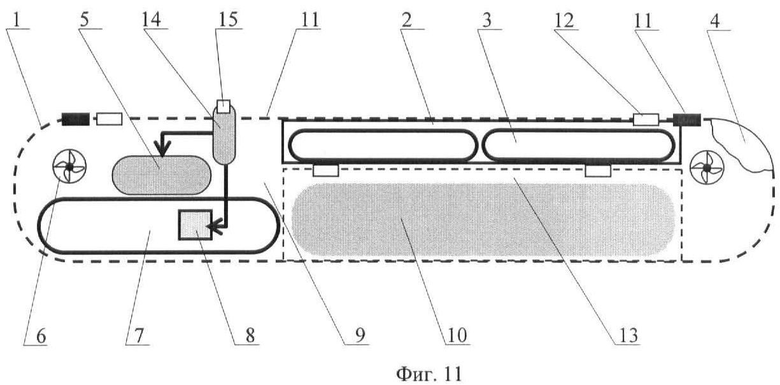
1. Подводная транспортная система, состоящая, по меньшей мере, из одного самоходного подводного судна, преимущественно в виде подводной лодки, с управляемой балластной системой, прочными цистернами постоянного водоизмещения, проницаемым наружным корпусом, энергетической установкой, движительно-рулевым комплексом и, по меньшей мере, одним непроницаемым прочным корпусом, в одном из которых размещен блок управления механизмами и системами подводного судна, отличающаяся тем, что, по меньшей мере, одно судно транспортной системы представляет собой самоходное подводное модульное судно, состоящее из главного модуля и, по меньшей мере, одного вспомогательного модуля, при этом все модули судна представляют собой функционально и конструктивно совместимые самоходные подводные суда, проницаемый наружный корпус которых выполнен несущим и оснащен однотипными силовыми элементами, предназначенными для взаимной жесткой и прочной фиксации модулей относительно друг друга, а также однотипными управляемыми захватами, функционально совместимыми с указанными силовыми элементами, а внутри несущего проницаемого корпуса имеется, по меньшей мере, один проницаемый грузовой отсек, оснащенный упомянутыми управляемыми захватами и, при этом, по меньшей мере, один из грузовых отсеков главного модуля судна выполнен так, чтобы в нем мог быть размещен, по меньшей мере, один из остальных модулей судна, а каждый модуль оснащен коммутирующими устройствами, соединенными через соответствующую арматуру с энергетической установкой и блоком управления и имеющими герметичные подводные разъемы, для подключения извне к энергетической установке и блоку управления модуля.
2. Подводная транспортная система по п.1, отличающаяся тем, что главный и, по меньшей мере, один вспомогательный модули судна оснащены стыковочными шлюзовыми устройствами для временного объединения внутренних полостей непроницаемых прочных корпусов главного и вспомогательных модулей судна.
3. Подводная транспортная система по п.1 или 2, отличающаяся тем, что самоходные модули судна выполнены автономными.
4. Подводная транспортная система по п.1 или 2, отличающаяся что, по меньшей мере, один модуль самоходного подводного модульного судна оснащен кабельным устройством, соединенным с блоком управления модуля и кабелем с подводным разъемом для подключения к коммутирующим устройствам других модулей.
5. Подводная транспортная система по п.4, отличающаяся тем, что кабельное устройство также соединено с энергетической установкой модуля.
6. Подводная транспортная система по п.1 или 2, отличающаяся тем, что система дополнительно включает, по меньшей мере, одно несамоходное подводное судно с несущим проницаемым наружным корпусом, в котором имеются силовые элементы, для прочной взаимной фиксации с модулями самоходного подводного модульного судна при помощи управляемых захватов самоходных модулей, и с проницаемым грузовым отсеком, оснащенным управляемыми захватами, кроме того, судно оснащено прочными конструктивными элементами постоянной плавучести для компенсации веса его конструкций под водой, управляемой балластной системой, включающей легкие балластные цистерны с открытым кингстоном и прочные цистерны постоянного водоизмещения, а также соединенными через соответствующую арматуру с управляемой балластной системой и управляемыми захватами несамоходного судна, подводными разъемами для подключения к энергетической установке и блоку управления самоходных модулей через их коммутирующее устройство.
| ПОДВОДНЫЙ ТРАСПОРТНЫЙ КОМПЛЕКС | 2007 |
|
RU2356779C2 |
| ШЕНКНЕХТ Р | |||
| и др | |||
| Суда и судоходство будущего | |||
| - Л.: Судостроение, 1981, с.98, рис.72; с.189, рис.169 | |||
| US 3823680 А, 16.07.1974 | |||
| GB 1067703 A, 03.05.1967. | |||

