Изобретение относится к области авиационной техники и может быть использовано для комплексного контроля топливных систем пассажирских и транспортных самолетов классической схемы, у которых топливо расположено в крыле, а нагрузка - в фюзеляже. Оно может быть использовано также для определения в полете текущего значения веса топлива, поперечной центровки самолета, обеспечения безопасности полета и оперативного управления основными аэродинамическими характеристиками самолета: дальностью, высотой, скоростью полета.
Известна система диагностирования неисправностей в устройствах числового программного управления, использующая программируемый контроллер, которая содержит удаленную главную ЭВМ, выполняющую процедуру диагностирования посредством считывания входных и выходных сигналов программируемого контроллера и выясняет неисправность путем обработки указанных входных и выходных сигналов [Пат. 90/02366 PCT (WO). МКИ G05B 23/02. Система диагностирования неисправностей / РЖ. Изобретения стран мира. №9. 1990]. Система обладает широкими возможностями общего применения по определению отказов. Однако для ее работы необходимо иметь входные и выходные сигналы анализируемой системы, что для топливных систем самолета имеет место лишь для наземного, предполетного измерения количества топлива с топливозаправщика. Для полетного контроля веса топлива и центровки необходимо применять датчик-топливомер в баке самолета [1, с.225-229], который имеет ограниченную надежность, как и двигатели (потребители топлива), трубопроводы, топливные баки, электропроводка и указатели веса топлива. Известны ошибки контроля веса топлива при таком наземном контроле («Планер Гимли»). Метод определения веса топлива топливомером имеет значение для качества контроля [2, с.99, табл.7.1].
Известно устройство полетного и предполетного контроля емкостного топливомера, содержащее реле, кнопки его дистанционного включения на корпусе указателя веса топлива и эталонные конденсаторы [Система управления и изменения топлива СУИТ4-5, СУИТ4-5А, СУИТ4-5Б, СУИТ4-5В. Руководство по технической эксплуатации 6Т1.620.020. РЭ. с.47, рис.22; Константинов В.Д. Авиационное оборудование и его эксплуатация. Изд. ВВИА им. Н.Е.Жуковского, 1966. с.171, фиг.10.7]. Датчик-топливомер входит в мостовую схему следящей системы, подключенной ко входу указателя. Емкость одного из конденсаторов этого устройства соответствует емкости датчика топливомера при пустом баке, а емкость другого - емкости датчика топливомера при наполнении бака на 2/3 его максимального объема. При нажатии кнопок вместо емкости датчика топливомера в мостовую измерительную схему топливомера реле включает эталонные конденсаторы. Отклонение стрелки указателя должно последовательно отображать нулевое значение веса топлива и 2/3 максимального веса топлива. Контроль сводится к определению исправности только мостовой схемы, следящей системы и указателя. Вес топлива, датчики, сигнальные линии, распределение топлива по бакам (центровка) не проверяются. Устройство не контролирует центровку самолета. Для типовых топливомеров типа СУИТ8 (надежность Р1(2)=0,998824, Т1=1700 ч) при контроле веса топлива на самолете ИЛ-86 (34 датчика, максимальная надежность контроля Рк(2)=0,99932) достоверность [3] обнаружения отказа топливной системы за 2 часа полета будет Рд1(2)=0,633894, что соответствует времени достоверного контроля Тд1=4,39 часа.
Известно устройство полетного контроля веса топлива самолета, содержащее емкостной топливомер и суммирующий расходомер топлива [Авиационные приборы. Под ред. С.С.Дорофеева. М.: Воен. издат., 1992. с.236-241]. Устройства дублируют друг друга. Датчиком емкостного топливомера является конденсатор, обкладки которого расположены в топливном баке и представляют собой коаксиальные профилированные трубы. Суммирующий расходомер топлива включает датчик-крыльчатку, связанный с магнитоиндукционным тахометром, расположенный в топливном трубопроводе между баком с топливом и двигателем самолета. Интегратор на выходе тахометра и схема вычитания с задатчиком начального количества топлива позволяют определить остаток топлива в баке. При заполнении бака топливом емкость конденсатора изменяется и на выходе мостовой электрической схемы, в одно из плеч которой включен конденсатор, появляется сигнал пропорциональный уровню топлива в баке самолета. Одновременно расход топлива из бака измеряется расходомером и его проинтегрированное значение вычитается из известного начального количества топлива на задатчике. Устройство имеет комплексный характер, так как служит и для контроля двигателя самолета по расходу топлива из бака. Суммирующий расходомер позволяет определить оставшийся объем топлива в баке. В полете пилот осуществляет постоянное наблюдение за разностью показаний дублирующих друг друга топливомера и суммирующего расходомера. У исправной топливной системы самолета она должна быть минимальной [4, с.237-242]. При появлении рассогласования показаний пилот может оказаться в сложной ситуации неопределенности состояния исправности системы, включающей двигатель самолета, топливо, топливные баки, трубопроводы, электропроводку, топливомер и суммирующий расходомер [5]. Учитывая весьма медленный характер расхода топлива в полете и сравнительно низкую надежность сложной многокомпонентной топливной системы самолета Р2(2)=0,998824×0,99757=0,996397 (Т2=554 часа), где Р3(2)=0,99757 - надежность суммирующего расходомера, имеют место ошибки пилотов из-за несовершенства такого полетного контроля. Во многом это обусловлено косвенным характером контроля веса топлива, как топливомером (по уровню топлива в баке), так и суммирующим расходомером (по разности заявленного объема и проинтегрированного расходомером объема). Достоверность контроля веса топлива по топливомеру здесь будет Рд2(2)=0,674411, а по суммирующему расходомеру - Рд3(2)=0,326382, что для топливомера соответствует времени достверного обнаружения отказа Тд3=1,79 часа, что меньше времени полета. Определение центровки самолета требует дополнительного внимания пилота.
Известна наиболее широко применяемая контрольно-поверочная аппаратура топливно-расходомерных систем в предполетном состоянии самолета [Авиационные приборы. Под ред. С.С.Дорофеева. М.: Воен. издат., 1992. с.248]. Устройство состоит из измерителя емкости сухих датчиков топливомера, самоуравновешивающегося моста переменного тока, двумя плечами которого является реостат контрольно-поверочной аппаратуры, а двумя другими - реостат в проверяемом приборе. Измерение электрической емкости производится с помощью магазина переменной емкости, в параллель которому подключается проверяемая емкость датчика. На лицевой панели аппаратуры расположена кассета для крепления указателя топливомера, сигнальные лампы и переключатели режимов работы системы. Производится измерение емкости датчиков топливомера и оценка исправности следящих систем и указателей. Для проверки расходомера без датчика-крыльчатки (его сложно демонтировать из трубопровода топливной системы) применяется индуктивно-импульсное устройство, по принципу действия и конструкции аналогичное устройству датчика расхода. Магнитоиндукционный тахометр здесь приводится во вращение электродвигателем, регулируемая скорость вращения которого имитирует различные часовые расходы топлива на самолете. Такой контроль проводится только на земле в частично демонтированной системе, обладает высокой степенью достоверности обнаружения отказа датчиков, но является весьма трудоемким [6, с.28; 7, с.257].
Наиболее близким из числа известных технических решений является устройство для полетного контроля веса нагрузки самолета [Пат. 2260179 РФ. МКИ G01G 19/07, G06G 7/70. Устройство для полетного контроля веса нагрузки самолета / В.Ю.Чернов // Б.И. 2005, №25], которое содержит датчик угла атаки, датчик числа Маха, датчик скорости, датчик высоты, датчик углов отклонения интерцепторов, датчик углов отклонения закрылков, датчик углов отклонения предкрылков, датчик углов отклонения щитков, датчик углов отклонения руля высоты, датчик углов отклонения стабилизатора, датчик центровки, датчик выпуска шасси, датчик скорости тангажа, датчик скорости крена, датчик скорости рыскания, умножитель, сумматор, дифференциатор, делитель, блок памяти, первый, второй и третий блоки сравнения, схему ИЛИ, коммутатор, функциональный преобразователь и блок определения момента тангажа, первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый, тринадцатый входы которого соединены соответственно с выходами датчика угла атаки, датчика числа Маха, датчика скорости, датчика высоты, датчика углов отклонения интерцепторов, датчика углов отклонения закрылков, датчика углов отклонения предкрылков, датчика углов отклонения щитков, датчика углов отклонения руля высоты, датчика углов отклонения стабилизатора, датчика центровки, датчика выпуска шасси, датчика скорости тангажа, первый вход сумматора через дифференциатор соединен с датчиком скорости тангажа, второй вход - с выходом умножителя, входы которого соединены с датчиком скорости крена и датчиком скорости рыскания, первый вход коммутатора, как и вход первого блока сравнения, соединены с выходом сумматора, второй вход коммутатора - с выходом делителя, первый вход которого, как и вход второго блока сравнения подключен к выходу блока определения момента тангажа, третий вход коммутатора - с выходом блока памяти, четвертый вход коммутатора, как и первый вход блока памяти - с выходом схемы ИЛИ, входы которой соединены соответственно с выходами первого и второго блоков сравнения, первый выход коммутатора - со вторым входом делителя, второй выход коммутатора - со вторым входом блока памяти, третий выход коммутатора - с входами функционального преобразователя, предназначенного для вычисления обратной функции, и третьего блока сравнения. В блоке определения момента тангажа проводится вычисление текущего значения момента тангажа, действующего на самолет. Одновременно определяется его угловое ускорение по тангажу. Вес нагрузки самолета определяется по известной функциональной связи с моментом инерции по поперечной оси связанной системы координат. Контроль веса реализован в устройстве сравнения.
Недостатком известного устройства-прототипа является невозможность определения веса топлива в полете. Причиной, препятствующей получению указанного ниже технического результата при использовании известного устройства-прототипа, является использование динамических и кинематических соотношений, описывающих движение самолета по поперечной оси связанной системы координат. В отличие от веса нагрузки влияние изменения веса топлива на инерционные характеристики самолета здесь минимально.
Основной задачей, на решение которой направлен заявляемый объект-устройство является полетный контроль веса топлива самолета.
Техническим результатом является повышение надежности и точности контроля топливной системы, достоверности оценки в полете действительного веса топлива, изменяющегося в полете. Применение для контроля иного физического принципа и штатного инерциального оборудования полностью в автономном режиме работы устройства повышает безопасность топливной системы без установки в баки электрических датчиков-топливомеров, устраняет элетропроводку, контролирует центровку и сокращает количество герметичных швов на топливных баках.
Указанный технический результат достигается тем, что в устройство для полетного контроля веса топлива самолета, содержащее датчик угла атаки, датчик числа Маха, датчик скорости, датчик высоты, датчик углов отклонения интерцепторов, датчик углов отклонения закрылков, датчик углов отклонения предкрылков, датчик скорости крена, датчик скорости тангажа и датчик скорости раскания, выход которого соединен с входом умножителя, дифференциатор, коммутатор, первый вход которого соединен с выходом делителя, первым входом соединенного с первым выходом коммутатора, второй вход коммутатора соединен с выходом блока памяти, первый вход которого, как и третий вход коммутатора, соединен с выходом схемы ИЛИ, входы которой соединены с выходами первого и второго блока сравнения, второй выход коммутатора соединен со вторым входом блока памяти, третий выход коммутатора соединен с входом функционального преобразователя, третий блок сравнения, введены датчик угла скольжения, датчик углов отклонения руля направления, датчик углов отклонения элеронов, датчик температуры, второй умножитель, второй и третий дифференциаторы, схема вычитания, сумматор на четыре входа, блок определения момента крена, первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый и тринадцатый входы которого соединены соответственно с выходами датчика угла атаки, датчика числа Маха, датчика скорости, датчика высоты, датчика углов отклонения интерцепторов, датчика углов отклонения закрылков, датчика углов отклонения предкрылков, датчика угла скольжения, датчика углов отклонения руля направления, датчика углов отклонения элеронов, датчика скорости крена, датчика скорости рыскания, датчика температуры, причем выход датчика скорости рыскания соединен со входом второго умножителя и входом второго дифференциатора, выход датчика скорости крена соединен с первым дифференциатором и вторым умножителем, выход блока определения момента крена соединен с первым суммирующим входом сумматора и входом второго блока сравнения, второй вычитающий вход сумматора, как и первый вычитающий вход схемы вычитания соединен с выходом первого умножителя, второй вход которого соединен с выходом датчика скорости тангажа, третий вычитающий вход сумматора соединен с выходом второго умножителя, четвертый суммирующий вход сумматора соединен с выходом второго дифференциатора, выход сумматора соединен со вторым входом делителя, выход первого дифференциатора соединен с суммирующим входом схемы вычитания, выход которой соединен с входами первого блока сравнения и четвертым входом коммутатора, вход третьего дифференциатора соединен с третьим выходом коммутатора, а выход - со входом третьего блока сравнения.
Совокупность существенных признаков изобретения обеспечивает получение технического результата, достигаемого при осуществлении изобретения - устройства для полетного контроля веса топлива самолета. При этом сущность изобретения заключается в определении веса топлива самолета через его момент инерции по продольной оси связанной системы координат. Для этого рассматривается динамика углового движения самолета по продольной оси связанной системы координат [8, с.20, 39]

где IX, IY, IZ - моменты инерции самолета соответственно по продольной, нормальной, поперечной осям;
IXY - центробежный момент инерции;
ωX, ωY, ωZ - угловые скорости самолета соответственно по продольной, нормальной, поперечной осям;
 ,
,  - угловое ускорение самолета по продольной и нормальной оси;
- угловое ускорение самолета по продольной и нормальной оси;
MX - момент внешних сил относительно продольной оси - момент крена.
Момент крена MX вычисляется в блоке определения момента крена по сигналам датчика угла атаки, датчика числа Маха, датчика скорости, датчика высоты, датчика углов отклонения интерцепторов, датчика углов отклонения закрылков, датчика углов отклонения предкрылков, датчика угла скольжения, датчика углов отклонения руля направления, датчика углов отклонения элеронов, датчика скорости крена, датчика скорости тангажа, датчика скорости рыскания и датчика температуры. Учитывая соотношения моментов инерции самолета классической схемы:

выражения (1) можно записать в виде, где только IX зависит от веса топлива mT,

Тогда, с учетом приведенных момента крена М'X и ускорения крена  получаем
получаем

Определение момента инерции по (4) возможно только при условиях:

где  , MXmin - пороговые значения углового ускорения
, MXmin - пороговые значения углового ускорения  и момента внешних сил М'X, для которых возможно определение момента инерции (4). Они определяются по (4) из условия точности решения задачи контроля. Если оба условия (5) выполняются, то момент инерции определяется по (4). Если же хотя бы одно из условий (5) не выполняется, то момент инерции определяется по значению вычисленному в предшествующий момент времени, когда условия (5) выполнялись. Информация о предшествующем значении момента инерции хранится в блоке памяти, а условия (5) определяются первым и вторым блоками сравнения, которые управляют работой блока памяти и коммутатором. Последний выдает либо текущее значение момента инерции с делителя, реализующего выражение (4), либо значение запомненное в блоке памяти. Момент инерции IX по продольной оси связанной системы координат, из-за малого радиуса инерции нагрузки mK в фюзеляже самолета, приближенно включает только две составляющие так, что
и момента внешних сил М'X, для которых возможно определение момента инерции (4). Они определяются по (4) из условия точности решения задачи контроля. Если оба условия (5) выполняются, то момент инерции определяется по (4). Если же хотя бы одно из условий (5) не выполняется, то момент инерции определяется по значению вычисленному в предшествующий момент времени, когда условия (5) выполнялись. Информация о предшествующем значении момента инерции хранится в блоке памяти, а условия (5) определяются первым и вторым блоками сравнения, которые управляют работой блока памяти и коммутатором. Последний выдает либо текущее значение момента инерции с делителя, реализующего выражение (4), либо значение запомненное в блоке памяти. Момент инерции IX по продольной оси связанной системы координат, из-за малого радиуса инерции нагрузки mK в фюзеляже самолета, приближенно включает только две составляющие так, что

где IX(mT) - момент инерции топлива в крыльях самолета;
IX(mK) - момент инерции нагрузки в фюзеляже самолета.
Сигнал на выходе коммутатора, пропорциональный IX, может быть контрольным сигналом по оценке веса топлива mT. Третий блок сравнения совместно с третьим дифференциатором реализует выполнение условия dIX/dt≤0. Оно соответствует монотонному убыванию функции IX(mT) при расходе топлива в полете и его симметричной выработке из баков правого и левого крыла [9, с.240, первая строка таблицы моментов инерции], что соответствует нормальной поперечной центровке самолета. Момент инерции IX(mT) для приближенной линейной модели крыла с равномерным распределением веса топлива здесь имеет наименьшее значение только при симметричном распределении веса по его размаху.
Одновременно, зная зависимость IX(mT) для данного типа самолета, в функциональном преобразователе вычисляется значение веса топлива mT=I-1 X, как обратная функция зависимости момента инерции от веса топлива на самолете. Выходной сигнал функционального преобразователя позволяет летчику определять текущее значение веса топлива. Так если момент инерции аппроксимируется полиномом вида

то в функциональном преобразователе реализуется соотношение

где а1÷а3 - коэффициенты сплайна аппроксимации известной зависимости IX(mT).
Указанный технический результат в частных случаях достигается тем, что в устройстве для полетного контроля веса топлива самолета по п.1, блок определения момента крена содержит блок управления и вычислитель момента крена, первый, второй, третий, четвертый, пятый входы которого соединены соответственно с первым, вторым, третьим, четвертым, пятым входами блока определения момента крена, шестой и седьмой входы которого соединены соответственно с первым и вторым входами блока управления, выход которого образует шину управления, соединенную с шестым входом вычислителя момента крена, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый входы которого соединены соответственно с восьмым, девятым, десятым, одиннадцатым, двенадцатым, тринадцатым входами блока определения момента крена, выход которого является выходом вычислителя момента крена. Сущность частного случая реализации блока определения момента крена состоит в разделении функций управления вычислениями и непрерывного вычисления момента соответственно в блоке управления и вычислителе момента крена. Блок управления получает на свои первый и второй входы сигналы, пропорциональные углам отклонения предкрылков и закрылков крыла самолета. По их величине он формирует сигналы управления на первом, втором, третьем или четвертом выходах шины управления u. Блок управления необходим для изменения коэффициентов в блоке вычисления момента крена при различных соотношениях углов предкрылков и закрылков механизации крыла во взлетном, набора высоты, крейсерском и посадочном режимах полета самолета.
Указанный технический результат в частных случаях достигается тем, что в устройстве для полетного контроля веса топлива самолета по п.2, вычислитель момента крена содержит восемнадцать блоков переменных коэффициентов, семнадцать умножителей, два делителя и сумматор так, что первый вход вычислителя момента крена соединен с первыми входами первого, второго, третьего, четвертого, пятого, шестого, седьмого, восьмого блоков переменных коэффициентов, второй вход вычислителя момента крена соединен с первыми входами девятого, десятого, одиннадцатого, двенадцатого, тринадцатого, четырнадцатого блоков переменных коэффициентов и вторыми входами первого, четвертого блоков переменных коэффициентов, третий вход вычислителя момента крена соединен с двумя входами третьего умножителя, первыми входами второго и третьего делителя, вторые входы которых соединены соответственно с выходами четвертого и пятого умножителей, выходы второго и третьего делителя соединены с входами второго сумматора, четвертый вход вычислителя момента крена соединен со вторыми входами девятого, десятого, одиннадцатого, двенадцатого, тринадцатого, четырнадцатого блоков переменных коэффициентов и первым входом пятнадцатого блока переменных коэффициентов, пятый вход вычислителя момента крена соединен с первым входом шестнадцатого блока переменных коэффициентов, второй вход которого, как и вторые входы второго, третьего, пятого, шестого, седьмого, восьмого, семнадцатого и восемнадцатого блоков переменных коэффициентов, соединен с шестым входом вычислителя момента крена, а выход - с входом шестого умножителя, второй вход которого соединен с выходом пятого блока переменных коэффициентов, а выход - с входом седьмого умножителя, второй вход которого соединен с выходом двенадцатого блока переменных коэффициентов, выход седьмого умножителя соединен с входом второго сумматора, седьмой вход вычислителя момента крена соединен с первым входом восьмого умножителя, второй вход которого соединен с выходом одиннадцатого блока переменных коэффициентов, а выход - с первым входом девятого умножителя, второй вход которого соединен с выходом четвертого блока переменных коэффициентов, выход девятого умножителя соединен с первым входом десятого умножителя, второй вход которого соединен с выходом третьего блока переменных коэффициентов, выход десятого умножителя соединен с входом второго сумматора, восьмой вход вычислителя момента крена соединен с первым входом семнадцатого блока переменных коэффициентов, выход которого соединен с входом одиннадцатого умножителя, второй вход которого соединен с выходом четырнадцатого блока переменных коэффициентов, выход одиннадцатого умножителя соединен с первым входом двенадцатого умножителя, второй вход которого соединен с выходом восьмого блока переменных коэффициентов, а выход - с входом второго сумматора, девятый вход вычислителя момента крена соединен с первым входом восемнадцатого блока переменных коэффициентов, выход которого соединен с тринадцатым умножителем, второй вход которого соединен с выходом девятого блока переменных коэффициентов, выход тринадцатого умножителя соединен с первым входом четырнадцатого умножителя, второй вход которого соединен с выходом седьмого блока переменных коэффициентов, а выход - с входом второго сумматора, десятый вход вычислителя момента крена соединен с первым входом пятнадцатого умножителя, второй вход которого соединен с выходом шестнадцатого умножителя, а выход - с первым входом пятого умножителя, второй вход которого соединен с выходом второго блока переменных коэффициентов, первый вход шестнадцатого умножителя соединен с выходом первого блока переменных коэффициентов, второй вход - с выходом десятого блока переменных коэффициентов, одиннадцатый вход вычислителя момента крена соединен с входом семнадцатого умножителя, второй вход которого соединен с выходом тринадцатого блока переменных коэффициентов, а выход - с первым входом четвертого умножителя, второй вход четвертого умножителя соединен с выходом шестого блока переменных коэффициентов, выход второго сумматора соединен с входом восемнадцатого умножителя, второй вход которого соединен с выходом третьего умножителя, а выход, как и выход пятнадцатого блока переменных коэффициентов, вторым входом подключенного к двенадцатому входу вычислителя момента крена, соединен с входами девятнадцатого умножителя, выход девятнадцатого умножителя является выходом вычислителя момента крена.
Вычислитель момента крена обеспечивает определение момента крена МX, действующего на самолет по сигналам датчика угла атаки, датчика числа Маха, датчика скорости, датчика высоты, датчика углов отклонения интерцепторов, датчика углов отклонения закрылков, датчика углов отклонения предкрылков, датчика углов скольжения, датчика углов отклонения руля напрвления, датчика углов отклонения элеронов, датчика скорости крена, датчика скорости рыскания, датчика скорости тангажа, датчика температуры. Вычисление проводится с переменными коэффициентами влияния параметров полета для основных углов отклонения предкрылков и закрылков механизации крыла. Команды на изменение коэффициентов поступают на вычислитель момента крена по шине управления с выхода блока управления, в котором производится оценка стадартных конфигураций углов отклонения предкрылков и закрылков крыла самолета.
Момент крена вычисляется по следующим соотношениям [10-11]:
где mX - коэффициент момента; ρ - плотность воздуха; V - скорость полета; S - площадь крыла; l - размах крыла [8, с.21]. Коэффициент момента mX включает [8, с.45; 10, с.129; 11, с.357 и др.]:

где 



 - составляющие коэффициента момента соответственно от углов отклонения элеронов, от углов отклонения руля направления, углов отклонения интерцепторов, угла скольжения, скорости крена, скорости рыскания самолета. Сумма составляющих коэффициентов получается на втором сумматоре вычислителя момента крена, входы которого включают все составляющие коэффициентов выражения (10), а выход, через восемнадцатый и девятнадцатый умножители, квадратор на третьем умножителе, и пятнадцатый блок переменных коэффициентов, формирует момент крена по выражению (9). Произведение 0,5 Sl в выражении (9) получается с помощью коэффициентов передачи названных умножителей и пятнадцатого блока переменных коэффициентов, который учитывает зависимость плотности воздуха ρ от температуры Т воздуха.
- составляющие коэффициента момента соответственно от углов отклонения элеронов, от углов отклонения руля направления, углов отклонения интерцепторов, угла скольжения, скорости крена, скорости рыскания самолета. Сумма составляющих коэффициентов получается на втором сумматоре вычислителя момента крена, входы которого включают все составляющие коэффициентов выражения (10), а выход, через восемнадцатый и девятнадцатый умножители, квадратор на третьем умножителе, и пятнадцатый блок переменных коэффициентов, формирует момент крена по выражению (9). Произведение 0,5 Sl в выражении (9) получается с помощью коэффициентов передачи названных умножителей и пятнадцатого блока переменных коэффициентов, который учитывает зависимость плотности воздуха ρ от температуры Т воздуха.
Коэффициент mX.ЭЛ, как функция углов атаки, отклонения элеронов и числа Маха формируется в седьмом, девятом, восемнадцатом блоках переменных коэффициентов, тринадцатом и четырнадцатом умножителях

где a0,7, а1,7, а2,7; a0,18, a1,18, a2,18 - переменные коэффициенты, изменяющиеся по сигналам управления на вторых входах седьмого и восемнадцатого блоков переменных коэффициентов по сигналу управления u с шестого управляющего входа вычислителя; a0,9, a1,9, a2,9 - переменные коэффициенты, изменяющиеся в девятом блоке переменных коэффициентов по сигналу, пропорциональному высоте полета.
Коэффициент mX.PH, как функция углов атаки, отклонения руля направления и числа Маха формируется в восьмом, четырнадцатом, семнадцатом блоках переменных коэффициентов, одиннадцатом и двенадцатом умножителях

где a0,8, a1,8, a2,8; a0,17, a1,17, a2,17 - переменные коэффициенты, изменяющиеся по сигналам управления на вторых входах восьмого и семнадцатого блоков переменных коэффициентов по сигналу управления u с шестого управляющего входа вычислителя; a0,14, а1,14, а2,14 - переменные коэффициенты, изменяющиеся в четырнадцатом блоке переменных коэффициентов по сигналу, пропорциональному высоте полета.
Коэффициент mX.ИН, как функция углов атаки, отклонения интерцепторов и числа Маха формируется в пятом, двенадцатом, шестнадцатом блоках переменных коэффициентов и шестом и седьмом умножителях

где a0,5, а1,5, а2,5; a0,16, a1,16, a2,16 - переменные коэффициенты, изменяющиеся по сигналам управления на вторых входах пятого и шестнадцатого блоков переменных коэффициентов по сигналу управления u с шестого управляющего входа вычислителя; а0,12, a1,12, a2,12 - переменные коэффициенты, изменяющиеся в двенадцатом блоке переменных коэффициентов по сигналу, пропорциональному высоте полета.
Коэффициент  , как функция углов атаки, скольжения и числа Маха формируется в третьем, четвертом, одиннадцатом блоках переменных коэффициентов и восьмом, девятом, десятом умножителях
, как функция углов атаки, скольжения и числа Маха формируется в третьем, четвертом, одиннадцатом блоках переменных коэффициентов и восьмом, девятом, десятом умножителях

где a0,3, a1,3, a2,3 - переменные коэффициенты, изменяющиеся по сигналам управления на вторых входах третьего блока переменных коэффициентов по сигналу управления u с шестого управляющего входа вычислителя; а0,4, а1,4, а2,4 - переменные коэффициенты, изменяющиеся в четвертом блоке переменных коэффициентов по сигналу, пропорциональному углу атаки; a0,11, a1,11, a2,11 - переменные коэффициенты, изменяющиеся в одиннадцатом блоке переменных коэффициентов по сигналу, пропорциональному высоте полета.
Коэффициент  , как функция углов атаки, скорости крена и числа Маха формируется в первом, втором, десятом блоках переменных коэффициентов, пятом, пятнадцатом, шестнадцатом умножителях и третьем делителе
, как функция углов атаки, скорости крена и числа Маха формируется в первом, втором, десятом блоках переменных коэффициентов, пятом, пятнадцатом, шестнадцатом умножителях и третьем делителе
где a0,2, а1,2, а2,2 - переменные коэффициенты, изменяющиеся по сигналам управления на втором входе второго блока переменных коэффициентов по сигналу управления u с шестого управляющего входа вычислителя; a0,1, а1,1, а2,1 - переменные коэффициенты, изменяющиеся в первом блоке переменных коэффициентов по сигналу, пропорциональному углу атаки; a0,10, a1,10, a2,10 - переменные коэффициенты, изменяющиеся в десятом блоке переменных коэффициентов по сигналу, пропорциональному высоте полета.
Коэффициент  , как функция углов атаки, скорости рыскания и числа Маха формируется в шестом, тринадцатом блоках переменных коэффициентов, четвертом, семнадцатом умножителях и втором делителе
, как функция углов атаки, скорости рыскания и числа Маха формируется в шестом, тринадцатом блоках переменных коэффициентов, четвертом, семнадцатом умножителях и втором делителе

где а0,6, а1,6, а2,6 - переменные коэффициенты, изменяющиеся по сигналам управления на втором входе шестого блока переменных коэффициентов по сигналу управления u с шестого управляющего входа вычислителя; а0,13, а1,13, а2,13 - переменные коэффициенты, изменяющиеся в тринадцатом блоке переменных коэффициентов по сигналу, пропорциональному высоте полета. Численные значения всех переменных коэффициентов аi,j i=0÷2, j=1÷18 получаются по аэродинамическим характеристикам конкретного самолета [см., например 11, с.350], на который устанавливается заявляемое устройство.
Проведенный заявителем анализ уровня техники установил, что аналоги, характеризующиеся совокупностями признаков, тождественными всем признакам заявленного устройства для полетного контроля веса топлива самолета, отсутствуют, следовательно, заявленное изобретение соответствует условию «новизна».
Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата и изобретение не основано на:
- дополнении известного устройства - аналога какой-либо известной частью, присоединенной к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно этого дополнения;
- замене какой-либо части устройства - аналога другой известной частью для достижения технического результата, в отношении которого установлено влияние именно такого дополнения;
- исключении какой-либо части устройства - аналога с одновременным исключением, обусловленной ее наличием функции, и достижением обычного для такого исключения результата;
- увеличении количества однотипных элементов для усиления технического результата, обусловленного наличием в устройстве именно таких элементов;
- выполнении известного устройства - аналога или его части из известного материала для достижения технического результата, обусловленного известными свойствами материала;
- создание устройства, состоящего из известных частей, выбор которых и связь между которыми осуществлены на основании известных правил и достигаемый при этом технический результат обусловлен только известными свойствами частей этого устройства и связей между ними;
- изменении количественного признака (признаков) устройства и предоставлении таких признаков во взаимосвязи либо изменение вида взаимосвязи, если известен факт влияния каждого из них на технический результат и новые значения этих признаков или их взаимосвязь могли быть получены исходя из известных зависимостей, следовательно, заявленное изобретение соответствует «изобретательскому уровню».
Сущность изобретения поясняется чертежами, где на фиг.1 изображена структурная схема устройства для полетного контроля веса топлива самолета. На фиг.1 приняты следующие обозначения:
1 - датчик угла атаки;
2 - датчик числа Маха;
3 - датчик скорости;
4 - датчик высоты;
5 - датчик углов отклонения интерцепторов;
6 - датчик углов отклонения закрылков;
7 - датчик углов отклонения предкрылков;
8 - датчик скорости крена;
9 - датчик скорости тангажа;
10 - датчик скорости рыскания;
11-1, 11-2 - первый, второй умножители;
12-1, 12-2, 12-3 - первый, второй, третий дифференциаторы;
13 - коммутатор;
14-1 - первый делитель;
15 - блок памяти;
16 - схема ИЛИ;
17-1, 17-2, 17-3 - первый, второй, третий блок сравнения;
18 - функциональный преобразователь;
19 - датчик угла скольжения;
20 - датчик углов отклонения руля направления;
21 - датчик углов отклонения элеронов;
22 - датчик температуры;
23-1 - первый сумматор;
24 - схема вычитания;
25 - блок определения момента крена.
На фиг.2 приведена структурная схема блока 25 определения момента крена по п.2 формулы, где приняты обозначения:
25 - блок определения момента крена;
26 - блок управления;
27 - вычислитель момента крена.
На фиг.3 приведена структурная схема вычислителя 27 определения момента крена по п.2 формулы, где приняты следующие обозначения:
27 - вычислитель момента крена;
11-3, 11-4, 11-5, 11-6, 11-7, 11-8, 11-9, 11-10, 11-11, 11-12, 11-13, 11-14, 11-15, 11-16, 11-17, 11-18, 11-19 - третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый, тринадцатый, четырнадцатый, пятнадцатый, шестнадцатый, семнадцатый, восемнадцатый, девятнадцатый умножители;
14-2, 14-3 - второй, третий делители;
23-2 - второй сумматор;
28-1, 28-2, 28-3, 28-4, 28-5, 28-6, 28-7, 28-8, 28-9, 28-10, 28-11, 28-12, 28-13, 28-14, 28-15, 28-16, 28-17, 28-18 - первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый, тринадцатый, четырнадцатый, пятнадцатый, шестнадцатый, семнадцатый, восемнадцатый блоки переменных коэффициентов.
На фиг.4 приведена структурная схема коммутатора 13 по п.1 формулы, где приняты следующие обозначения:
13 - коммутатор;
29-1, 29-2, 29-3 - первая, вторая, третья пара нормально замкнутых контактов.
На фиг.5 приведена структурная схема блока 26 управления по п.1 формулы, где приняты следующие обозначения:
17-4, 17-5, 17-6, 17-7, 17-8, 17-9, 17-10 - четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый блоки сравнения;
30-1, 30-2, 30-3, 30-4 - первая, вторая, третья, четвертая схемы И.
На фиг.6 приведена структурная схема блока 28-1÷18 переменного коэффициента по п.3 формулы, где приняты следующие обозначения:
23-3 - третий сумматор;
11-20 - двадцатый умножитель;
31 - источник постоянного сигнала;
32-1, 32-2, 32-3 - первый, второй, третий усилители с переменным коэффициентом усиления.
Устройство для полетного контроля веса топлива самолета содержит датчик 1 угла атаки, датчик 2 числа Маха, датчик 3 скорости, датчик 4 высоты, датчик 5 углов отклонения интерцепторов, датчик 6 углов отклонения закрылков, датчик 7 углов отклонения предкрылков, датчик 8 скорости крена, датчик 9 скорости тангажа, датчик 10 скорости рыскания, выход которого соединен с входами первого 11-1 и второго 11-2 умножителей, вторые входы которых соединены соответственно с выходами датчика 9 скорости тангажа и датчика 8 скорости крена, первый дифференциатор 12-1, вход которого соединен с выходом датчика 8 скорости крена, второй дифференциатор 12-2, вход которого соединен с выходом датчика 10 скорости рыскания, коммутатор 13, первый вход которого соединен с выходом первого делителя 14-1, первым входом соединенного с первым выходом коммутатора 13, второй вход коммутатора 13 соединен с выходом блока 15 памяти, первый вход которого, как и третий вход коммутатора 13, соединен с выходом схемы 16 ИЛИ, входы которой соединены с выходами первого 17-1 и второго 17-2 блока сравнения, второй выход коммутатора 13 соединен со вторым входом блока 15 памяти, третий выход коммутатора 13 соединен с входом функционального преобразователя 18 и входом третьего дифференциатора 12-3, выход которого соединен с третьим блоком 17-3 сравнения, блок 25 определения момента крена, первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый и тринадцатый входы которого соединены соответственно с выходами датчика 1 угла атаки, датчика 2 числа М, датчика 3 скорости, датчика 4 высоты, датчика 5 углов отклонения интерцепторов, датчика 6 углов отклонения закрылков, датчика 7 углов отклонения предкрылков, датчика 19 угла скольжения, датчика 20 углов отклонения руля направления, датчика 21 углов отклонения элеронов, датчика 8 скорости крена, датчика 10 скорости рыскания, датчика 22 температуры, выход блока 25 определения момента крена соединен с первым суммирующим входом сумматора 23-1 и входом блока 17-2 сравнения, второй вычитающий вход сумматора 23-1, как и первый вычитающий вход схемы 24 вычитания, соединен с выходом первого умножителя 12-1, третий вычитающий вход сумматора 23-1 соединен с выходом второго умножителя 11-2, четвертый суммирующий вход сумматора 23-1 соединен с выходом второго дифференциатора 12-2, выход сумматора 23-1 соединен со вторым входом делителя 14-1, выход первого дифференциатора 12-1 соединен с суммирующим входом схемы 24 вычитания, выход которой соединен с входами первого блока 17-1 сравнения и четвертым входом коммутатора 13.
Блок 25 определения момента крена содержит блок 26 управления и вычислитель 27 момента крена, первый, второй, третий, четвертый, пятый входы которого соединены соответственно с первым, вторым, третьим, четвертым, пятым входами блока 25 определения момента крена, шестой и седьмой входы которого соединены соответственно с первым и вторым входами блока 26 управления, выход которого образует шину и управления, соединенную с шестым входом вычислителя 27 момента крена, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый входы которого соединены соответственно с восьмым, девятым, десятым, одиннадцатым, двенадцатым, тринадцатым входами блока 25 определения момента крена, выход которого является выходом вычислителя 27 момента крена.
Вычислитель 27 момента крена содержит восемнадцать блоков переменных коэффициентов 28-1÷18, семнадцать умножителей 11-3÷19, два делителя 14-2÷3 и сумматор 23-2. Первый вход вычислителя 27 момента крена соединен с первыми входами блоков 28-1, 28-2, 28-3, 28-4, 28-5, 28-6, 28-7, 28-8 переменных коэффициентов, второй вход вычислителя 27 момента крена соединен с первыми входами блоков 28-9, 28-10, 28-11, 28-12, 28-13, 28-14 переменных коэффициентов и вторыми входами блоков 28-1, 28-4 переменных коэффициентов, третий вход вычислителя 27 момента крена соединен с двумя входами третьего умножителя 11-3, первыми входами второго 14-2 и третьего 14-3 делителя, вторые входы которых соединены соответственно с выходами четвертого 11-4 и пятого 11-5 умножителей, выходы второго 14-2 и третьего 14-3 делителя соединены с входами второго сумматора 23-2, четвертый вход вычислителя 27 момента крена соединен со вторыми входами блоков 28-9, 28-10, 28-11, 28-12, 28-13, 28-14 переменных коэффициентов и первым входом блока 28-15 переменных коэффициентов, пятый вход вычислителя 27 момента крена соединен с первым входом блока 28-16 переменных коэффициентов, второй вход которого, как и вторые входы блоков 28-2, 28-3, 28-5, 28-6, 28-7, 28-8, 28-17, 28-18 переменных коэффициентов, соединен с шестым входом вычислителя 27 момента крена, а выход - с входом шестого умножителя 11-6, второй вход которого соединен с выходом блока 28-5 переменных коэффициентов, а выход - с входом седьмого умножителя 11-7, второй вход которого соединен с выходом блока 28-12 переменных коэффициентов, выход седьмого умножителя 11-7 соединен с входом второго сумматора 23-2, седьмой вход вычислителя 27 момента крена соединен с первым входом восьмого умножителя 11-8, второй вход которого соединен с выходом блока 28-11 переменных коэффициентов, а выход - с первым входом девятого умножителя 11-9, второй вход которого соединен с выходом блока 28-4 переменных коэффициентов, выход девятого умножителя 11-9 соединен с первым входом десятого умножителя 11-10, второй вход которого соединен с выходом блока 28-3 переменных коэффициентов, выход десятого умножителя 11-10 соединен с входом второго сумматора 23-2, восьмой вход вычислителя 27 момента крена соединен с первым входом блока 28-17 переменных коэффициентов, выход которого соединен с входом одиннадцатого умножителя 11-11, второй вход которого соединен с выходом блока 28-14 переменных коэффициентов, выход одиннадцатого умножителя 11-11 соединен с первым входом двенадцатого умножителя 11-12, второй вход которого соединен с выходом блока 28-8 переменных коэффициентов, а выход - с входом второго сумматора 23-2, девятый вход вычислителя 27 момента крена соединен с первым входом блока 28-18 переменных коэффициентов, выход которого соединен с тринадцатым умножителем 11-13, второй вход которого соединен с выходом блока 28-9 переменных коэффициентов, выход тринадцатого умножителя 11-13 соединен с первым входом четырнадцатого умножителя 11-14, второй вход которого соединен с выходом блока 28-7 переменных коэффициентов, а выход - с входом второго сумматора 23-2, десятый вход вычислителя 27 момента крена соединен с первым входом пятнадцатого умножителя 11-15, второй вход которого соединен с выходом шестнадцатого умножителя 11-16, а выход - с первым входом пятого умножителя 11-5, второй вход которого соединен с выходом блока 28-2 переменных коэффициентов, первый вход шестнадцатого умножителя 11-16 соединен с выходом блока 28-1 переменных коэффициентов, второй вход - с выходом блока 28-10 переменных коэффициентов, одиннадцатый вход вычислителя 27 момента крена соединен с входом семнадцатого умножителя 11-17, второй вход которого соединен с выходом блока 28-13 переменных коэффициентов, а выход - с первым входом четвертого умножителя 11-4, второй вход четвертого умножителя 11-4 соединен с выходом блока 28-6 переменных коэффициентов, выход второго сумматора 23-2 соединен с входом восемнадцатого умножителя 11-18, второй вход которого соединен с выходом третьего умножителя 11-3, а выход, как и выход блока 28-15 переменных коэффициентов, вторым входом подключенного к двенадцатому входу вычислителя 27 момента крена, соединен с входами девятнадцатого умножителя 11-19, выход девятнадцатого умножителя 11-19 является выходом вычислителя 27 момента крена.
Коммутатор 13 содержит три пары нормально замкнутых контактов 29-1, 29-2, 29-3 так, что первый вход коммутатора 13 через нормально замкнутые контакты 29-2, 29-3 соединен со вторым и третьим выходом, а четвертый вход коммутатора 13 через нормально замкнутый контакт 29-1 соединен с первым выходом коммутатора 13, третий вход - управляющий вход синхронного переключения нормально замкнутых контактов 29-1, 29-2, 29-3, при котором происходит только соединение второго входа коммутатора 13 с его третьим выходом.
Блок управления 26 содержит семь блоков 17-4÷10 сравнения и четыре схемы 30-1÷4 И. Первый вход блока 26 управления соединен с входами блоков 17-4, 17-5, 17-6 сравнения, второй вход блока 26 управления соединен с входами блоков 17-7, 17-8, 17-9, 17-10 сравнения. Первый вход схемы 30-1 И, как и первый вход схемы 30-2 И, соединен с выходом блока 17-4 сравнения, второй вход - с выходом блока 17-8 сравнения, а выход - с первым выходом шины управления. Второй вход схемы 30-2 И соединен с выходом блока 17-7 сравнения, а выход - со вторым выходом шины управления. Первый вход схемы 30-3 И соединен с выходом блока 17-5 сравнения, второй вход - с выходом блока 17-9 сравнения, а выход - с третьим выходом шины управления. Первый вход схемы 30-4 И соединен с выходом блока 17-6 сравнения, второй вход - с выходом блока 17-10 сравнения, а выход - с четвертым выходом шины управления.
Блок 28-1÷18 переменных коэффициентов содержит источник 31 постоянного сигнала, умножитель 11-20, сумматор 23-3 и усилители 32-1÷3 с переменными коэффициентами усиления. Первый, второй, третий, четвертый управляющие входы усилителей 32-1÷3 соединены с одноименными входами шины управления и на втором входе блоков 28-1÷18 переменных коэффициентов. Пятый вход усилителя 32-1 с переменным коэффициентом усиления соединен с выходом источника 31 постоянного сигнала, а выход - с первым входом сумматора 23-3. Пятый вход усилителя 32-2 с переменным коэффициентом усиления, как и входы умножителя 11-20, соединен с первым входом блока 28-1÷18 переменного коэффициента усиления, а выход - со вторым входом сумматора 23-3. Пятый вход усилителя 32-3 с переменным коэффициентом усиления соединен с выходом умножителя 11-20, а выход - с третьим входом сумматора 23-3, выход которого является выходом блоков 28-1÷18 переменных коэффициентов.
Практическая реализация устройства для полетного контроля веса топлива самолета возможна на элементах аналоговой и цифровой схемотехнической базы [12]. Однако предпочтение здесь следует отдать дополнительным программным средствам серийной вычислительной системы управления полетом типа ВСУП-85 комплекса стандартного цифрового пилотажно-навигационного оборудования КСЦПНО (например самолетов Ту-204/214, Ил-96) [13, с.63; 14, с.141], который уже содержит все необходимые измерительные средства предлагаемого устройства. Так датчик 1 угла атаки, датчик 2 числа Маха, датчик 3 скорости, датчик 4 высоты, датчик 19 угла скольжения, датчик 22 температуры реализованы в системе воздушных сигналов СВС-85, а датчик 8 скорости крена, датчик 9 скорости тангажа, датчик 10 скорости рыскания - в бесплатформенной лазерной инерциальной системе И-42-1С на датчиках угловых скоростей КМ-11. Обмен информацией между указанными системами, датчиком 5 углов отклонения интерцепторов, датчиком 6 отклонения закрылков, датчиком 7 углов отклонения предкрылков, датчиком 20 углов отклонения руля направления, датчиком 21 углов отклонения элеронов и ЦВМ-80-40001 в КСЦПНО осуществляется последовательным биполярным кодом асинхронным способом в соответствии с ГОСТ 18977-79 и представляется на пульте управления и индикации ПУИ-85М. При этом умножители 11-1, 11-2, дифференциаторы 12-1, 12-2, коммутатор 13, делитель 14-1, блок 15 памяти, схема 16 ИЛИ, блоки 17-1, 17-2, 17-3 сравнения, функциональный преобразователь 18, сумматор 23-1 и блок 25 определения момента крена с блоком 26 управления и вычислителем 27 момента крена с их связями реализуются программно в ЦВМ-80, что обеспечивает высокую точность и надежность работы устройства. Для более современной комплексной системы электронной индикации и сигнализации КСЭИС-148 и вычислительной системы самолетовождения ВСС-100 (самолета ан-148) с вычислителями типа ВЦ-3, информационным комплексом высотно-скоростных параметров ИКВСП, бесплатформенной системой курса и вертикали LCR-93 реализация устройства дает еще более высокие результаты [15].
Устройство для полетного контроля веса топлива самолета работает следующим образом. Сигналы, пропорциональные углу α атаки, числу Маха М, скорости V, высоте Н, углу δИ отклонения интерцепторов, углу δЗ отклонения закрылков, углу δП отклонения предкрылков, углу β скольжения, углу δН отклонения руля направления, углу δЭ отклонения элеронов, угловой скорости ωХ крена, угловой скорости ωY рыскания и температуре Т, поступают соответственно на первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый, тринадцатый входы блока 25 определения момента крена, где производится вычисление текущего значения момента MX крена, действующего на самолет по его продольной оси. Сигнал, пропорциональный величине этого момента, с выхода блока 25 определения момента крена, поступает на первый суммирующий вход первого сумматора 23-1 и вход блока 17-2 сравнения. Одновременно сигнал, пропорциональный угловой скорости ωZ тангажа, поступает на один вход первого умножителя 11-1, на другой вход которого поступает сигнал, пропорциональный угловой скорости ωY рыскания, с датчика 10 скорости рыскания, а на выходе образуется сигнал, пропорциональный ωZωY. Он поступает на второй вычитающий вход первого сумматора 23-1 и первый вычитающий вход схемы 24 вычитания. Сигнал, пропорциональный угловой скорости ωX крена, с датчика 8 скорости крена, поступает на первый дифференциатор 12-1 и один вход второго умножителя 11-2, на другой вход которого поступает сигнал, пропорциональный угловой скорости ωY, с датчика 10 скорости рыскания. На выходе умножителя 11-2 получается сигнал, пропорциональный ωXωY, который поступает на третий вычитающий вход сумматора 23-1, на четвертый суммирующий вход которого поступает продифференцированный в дифференциаторе 12-2 сигнал, пропорциональный угловой скорости ωY. Так на выходе сумматора 23-1 получается сигнал, пропорциональный

где (IZ-IY)0 - независимая от веса mT топлива разность моментов инерции IZ и IY самолета; IXY0 - независимое от веса mT топлива значение центробежного момента инерции IXY самолета. Соотношение получается из выражения (1) при учете известной для типа самолета зависимости его моментов инерции от веса mT топлива. По выражению (1) определяется и зависимая от веса mT топлива часть в виде

Сигнал, пропорциональный угловым ускорениям в круглых скобках, получается на выходе схемы 24 вычитания. В том случае, если этот сигнал меньше  , что проверяется в блоке 17-1 сравнения, то сигнал, пройдя через четвертый вход и первый выход коммутатора 13, поступает на первый вход делителя 14-1. Если одновременно выполняется и условие MX≥MXmin, которое проверяется в блоке 17-2 сравнения, то делитель 14-1 выполняет деление сигнала с выхода сумматора 23-1, пропорционального выражению (17), на сигнал, имеющийся на первом входе делителя 14-1 так, что получается сигнал, пропорциональный моменту инерции
, что проверяется в блоке 17-1 сравнения, то сигнал, пройдя через четвертый вход и первый выход коммутатора 13, поступает на первый вход делителя 14-1. Если одновременно выполняется и условие MX≥MXmin, которое проверяется в блоке 17-2 сравнения, то делитель 14-1 выполняет деление сигнала с выхода сумматора 23-1, пропорционального выражению (17), на сигнал, имеющийся на первом входе делителя 14-1 так, что получается сигнал, пропорциональный моменту инерции

С выхода делителя 14-1 он поступает на первый вход коммутатора 13 и через его нормальнозамкнутые контакты на второй и третий выходы. Со второго выхода коммутатора 13 сигнал поступает на второй сигнальный вход блока 15 памяти, где происходит его повторение без запоминания, так как на первом управляющем входе блока 15 памяти нет сигнала. С третьего выхода коммутатора 13 сигнал поступает на функциональный преобразователь 18, реализующий обратную функцию (8) зависимости момента инерции IX(mT) от веса топлива. Одновременно сигнал с третьего выхода коммутатора 13 через дифференциатор 12-3 поступает на вход блока 17-3 сравнения. При этом проверяется условие ограниченного по скорости нормальной выработки топлива изменения момента инерции  . При симметричной выработке топлива из правых и левых крыльевых баков самолета отрицательная скорость изменения момента инерции İx должна быть ограничена весьма малой величиной. Несимметричная выработка топлива из-за отказа топливного насоса, нарушения герметичности баков, неисправности топливной системы одного из двигателей, приводящие к неравномерному потреблению топлива и нарушению центровки, приводят к повышению момента инерции IX, изменению величины и знака его производной, что и фиксируется блоком 17-3 сравнения. Контроль веса топлива на выходе функционального преобразователя 18 производится как в автоматическом, так и полуатоматическом режиме, когда ведется визуальное сопоставление пилотом показаний заявляемого устройства с топливомером или суммирующим расходомером, фиксируемое бортовым регистратором.
. При симметричной выработке топлива из правых и левых крыльевых баков самолета отрицательная скорость изменения момента инерции İx должна быть ограничена весьма малой величиной. Несимметричная выработка топлива из-за отказа топливного насоса, нарушения герметичности баков, неисправности топливной системы одного из двигателей, приводящие к неравномерному потреблению топлива и нарушению центровки, приводят к повышению момента инерции IX, изменению величины и знака его производной, что и фиксируется блоком 17-3 сравнения. Контроль веса топлива на выходе функционального преобразователя 18 производится как в автоматическом, так и полуатоматическом режиме, когда ведется визуальное сопоставление пилотом показаний заявляемого устройства с топливомером или суммирующим расходомером, фиксируемое бортовым регистратором.
При невыполнении одного или обоих условий (5) в блоках 17-1 и 17-2 сравнения на выходе одного или обоих блоков 17-1 и/или 17-2 сравнения появляется сигнал, который, пройдя схему 16 ИЛИ, поступает на первый вход блока 15 памяти и третий управляющий вход коммутатора 13. Одновременно переключаются все контактные пары коммутатора 13 так, что сигналы делителя 14-1 не поступают на его третий выход, а значит и входы функционального преобразователя 18 и блока 17-3 сравнения. Сигнал на первом входе управления блока 15 памяти переводит его в режим хранения значения сигнала, поступающего на его второй сигнальный вход в предшествующий момент времени. Нормально разомкнутый контакт коммутатора 13 соединяет его второй вход с третьим выходом и запомненное значение сигнала, пропорциональное моменту инерции IX(mT), вычисленное в предшествующий момент времени, поступает в функциональный преобразователь 18 и через дифференциатор 12-3 на блок 17-3 сравнения. Устройство полетного контроля веса топлива работает в режиме памяти. Этот режим сохраняет для экипажа непрерывную информацию о весе топлива mT до момента времени, пока вновь не будут выполнены условия (5).
Длительность этого режима зависит от точности измерений параметров, динамики самолета и его управления летчиком.
Блок 25 определения момента крена работает следующим образом. Сигналы датчика 1 угла атаки, датчика 2 числа Маха, датчика 3 скорости, датчика 4 высоты, датчика 5 углов отклонения интерцепторов поступают соответственно на первый, второй, третий, четвертый, пятый входы блока 25 определения момента крена и одноименные входы вычислителя 27 момента крена. Одновременно с датчика 19 угла скольжения, датчика 20 углов отклонения руля направления, датчика 21 углов отклонения элеронов, датчика 22 температуры сигналы поступают соответственно на восьмой, девятый, десятый, тринадцатый входы блока 25 определения момента крена, на одиннадцатый и двенадцатый входы которого поступают соответственно выходные сигналы датчика 8 скорости крена и датчика 10 скорости рыскания. Сигналы с восьмого, девятого, десятого, одиннадцатого, двенадцатого и тринадцатого входов блока 25 определения момента крена поступают соответственно на седьмой, восьмой, девятый, десятый, одиннадцатый и двенадцатый входы вычислителя 27 момента крена, управление которым ведется по сигналу u на его шестом входе. На шестой вход вычислителя 27 момента крена поступает управляющий сигнал u по шине управления с блока 26 управления. Сигнал u формируется в блоке 26 управления для изменения переменных коэффициентов в вычислителе 27 момента крена. Для этого на первый и второй входы блока 26 управления поступают соответственно сигналы с шестого и седьмого входов блока 25 определения момента крена. Они получаются на выходах соответственно датчика 6 углов отклонения закрылков и датчика 7 углов отклонения предкрылков. Тем самым учитывается влияние изменения аэродинамики самолета при работе механизации крыла на взлете, наборе высоты, крейсерском полете и посадке.
Вычислитель 27 момента крена работает следующим образом. Сигнал, пропорциональный углу α атаки, с первого входа вычислителя 27 момента крена поступает на первые входы блоков 28-1, 28-2, 28-3, 28-4, 28-5, 28-6, 28-7, 28-8 переменных коэффициентов. При этом учитывается зависимость составляющих коэффициента момента (10) от угла атаки самолета. Сигнал, пропорциональный числу М, со второго входа вычислителя 27 момента крена поступает на первые входы блоков 28-9, 28-10, 28-11, 28-12, 28-13, 28-14 переменных коэффициентов, вторые входы блоков 28-1, 28-4 переменных коэффициентов. Сигнал, пропорциональный V, с третьего входа вычислителя 27 момента крена поступает на оба входа умножителя 11-3, первые входы второго 14-2 и третьего 14-3 делителя, на вторые входы которых поступают соответственно сигналы с выходов умножителей 11-4, 11-5. С выхода делителя 14-2 сигнал, пропорциональный  , поступает на вход сумматора 23-2, аналогично на вход с выхода делителя 14-3 поступает сигнал, пропорциональный
, поступает на вход сумматора 23-2, аналогично на вход с выхода делителя 14-3 поступает сигнал, пропорциональный 
Сигнал, пропорциональный высоте Н, с четвертого входа вычислителя 27 момента крена поступает на вторые входы блоков 28-9, 28-10, 28-11, 28-12, 28-13, 28-14 переменных коэффициентов и первый вход блока 28-15 переменных коэффициентов. Сигнал, пропорциональный углу δИ отклонения интерцепторов, с пятого входа вычислителя 27 момента крена поступает на первый вход блока 28-16 переменных коэффициентов, на второй вход которого, как и на вторые входы блоков 28-2, 28-3, 28-5, 28-6, 28-7, 28-8, 28-17, 28-18 переменных коэффициентов, поступает сигнал u управления с шестого входа вычислителя 27 момента крена. Выходной сигнал блока 28-16 переменных коэффициентов поступает на вход умножителя 11-6, на второй вход которого поступает выходной сигнал блока 28-5 переменных коэффициентов. Выходной сигнал умножителя 11-6 поступает на вход умножителя 1-7, на другой вход которого поступает выходной сигнал блока 28-12 переменных коэффициентов. С выхода умножителя 11-7 сигнал, пропорциональный mХ.ИН, поступает на вход сумматора 23-2. Сигнал, пропорциональный углу β скольжения, с седьмого входа вычислителя 27 момента крена поступает на вход умножителя 11-8, на другой вход которого поступает выходной сигнал блока 28-11 переменных коэффициентов. Выходной сигнал умножителя 11-8 поступает на первый вход умножителя 11-9, на второй вход которого поступает выходной сигнал блока 28-4 переменных коэффициентов. С выхода умножителя 11-9 сигнал поступает на вход умножителя 11-10, на другой вход которого поступает выходной сигнал блока 28-3 переменных коэффициентов. Выходной сигнал умножителя 11-10, пропорциональный  , поступает на вход сумматора 23-2. Сигнал, пропорциональный углу δН отклонения руля направления, с восьмого входа вычислителя 27 момента крена поступает на первый вход блока 28-17 переменных коэффициентов. Выходной сигнал блока 28-17 переменных коэффициентов поступает на вход умножителя 11-11, на другой вход которого поступает выходной сигнал блока 28-14 переменных коэффициентов. Выходной сигнал умножителя 11-11 поступает на вход умножителя 11-12, на другой вход которого поступает выходной сигнал блока 28-8 переменных коэффициентов. Выходной сигнал умножителя 11-12, пропорциональный mX.РН, поступает на вход сумматора 23-2. Сигнал, пропорциональный углу δЭ отклонения элеронов, с девятого входа вычислителя 27 момента крена поступает на первый вход блока 28-18 переменных коэффициентов. Выходной сигнал блока 28-18 переменных коэффициентов поступает на вход умножителя 11-13, на другой вход которого поступает сигнал с выхода блока 28-9 переменных коэффициентов. Выходной сигнал умножителя 11-13 поступает на вход умножителя 11-14, на другой вход которого поступает выходной сигнал блока 28-7 переменных коэффициентов. Выходной сигнал умножителя 11-14, пропорциональный тХ.ЭЛ, поступает на вход сумматора 23-2. Сигнал, пропорциональный скорости ωX крена, с десятого входа вычислителя 27 момента крена поступает на вход умножителя 11-15, на другой вход которого поступает выходной сигнал умножителя 11-16. При этом на один вход умножителя 11-16 поступает выходной сигнал блока 28-1 переменных коэффициентов, а на другой - выходной сигнал блока 28-10 переменных коэффициентов. Выходной сигнал умножителя 11-15 поступает на вход умножителя 11-5, на другой вход которого поступает выходной сигнал блока 28-2 переменных коэффициентов. Далее выходной сигнал умножителя 11-5 через второй вход делителя 14-2 участвует в получении на входе сумматора 23-2 сигнала, пропорционального
, поступает на вход сумматора 23-2. Сигнал, пропорциональный углу δН отклонения руля направления, с восьмого входа вычислителя 27 момента крена поступает на первый вход блока 28-17 переменных коэффициентов. Выходной сигнал блока 28-17 переменных коэффициентов поступает на вход умножителя 11-11, на другой вход которого поступает выходной сигнал блока 28-14 переменных коэффициентов. Выходной сигнал умножителя 11-11 поступает на вход умножителя 11-12, на другой вход которого поступает выходной сигнал блока 28-8 переменных коэффициентов. Выходной сигнал умножителя 11-12, пропорциональный mX.РН, поступает на вход сумматора 23-2. Сигнал, пропорциональный углу δЭ отклонения элеронов, с девятого входа вычислителя 27 момента крена поступает на первый вход блока 28-18 переменных коэффициентов. Выходной сигнал блока 28-18 переменных коэффициентов поступает на вход умножителя 11-13, на другой вход которого поступает сигнал с выхода блока 28-9 переменных коэффициентов. Выходной сигнал умножителя 11-13 поступает на вход умножителя 11-14, на другой вход которого поступает выходной сигнал блока 28-7 переменных коэффициентов. Выходной сигнал умножителя 11-14, пропорциональный тХ.ЭЛ, поступает на вход сумматора 23-2. Сигнал, пропорциональный скорости ωX крена, с десятого входа вычислителя 27 момента крена поступает на вход умножителя 11-15, на другой вход которого поступает выходной сигнал умножителя 11-16. При этом на один вход умножителя 11-16 поступает выходной сигнал блока 28-1 переменных коэффициентов, а на другой - выходной сигнал блока 28-10 переменных коэффициентов. Выходной сигнал умножителя 11-15 поступает на вход умножителя 11-5, на другой вход которого поступает выходной сигнал блока 28-2 переменных коэффициентов. Далее выходной сигнал умножителя 11-5 через второй вход делителя 14-2 участвует в получении на входе сумматора 23-2 сигнала, пропорционального  Сигнал, пропорциональный скорости ωY рыскания, с одиннадцатого входа вычислителя 27 момента крена поступает на вход умножителя 11-17, на другой вход которого поступает выходной сигнал с блока 28-13 переменных коэффициентов. Выходной сигнал умножителя 11-17 поступает на один вход умножителя 11-4, на другой вход которого поступает выходной сигнал блока 28-6 переменных коэффициентов. Далее выходной сигнал умножителя 11-4 через второй вход делителя 14-2 обеспечивает получение на входе сумматора 23-2 сигнала, пропорционального
Сигнал, пропорциональный скорости ωY рыскания, с одиннадцатого входа вычислителя 27 момента крена поступает на вход умножителя 11-17, на другой вход которого поступает выходной сигнал с блока 28-13 переменных коэффициентов. Выходной сигнал умножителя 11-17 поступает на один вход умножителя 11-4, на другой вход которого поступает выходной сигнал блока 28-6 переменных коэффициентов. Далее выходной сигнал умножителя 11-4 через второй вход делителя 14-2 обеспечивает получение на входе сумматора 23-2 сигнала, пропорционального  Выходной сигнал сумматора 23-2, пропорциональный коэффициенту момента mX (10), поступает на вход умножителя 11-18, где он умножается на выходной сигнал умножителя 11-3 так, что выходной сигнал умножителя 11-18 пропорционален
Выходной сигнал сумматора 23-2, пропорциональный коэффициенту момента mX (10), поступает на вход умножителя 11-18, где он умножается на выходной сигнал умножителя 11-3 так, что выходной сигнал умножителя 11-18 пропорционален  Этот сигнал поступает на вход умножителя 11-9, на другой вход которого поступает выходной сигнал блока 28-15 переменных коэффициентов. На второй вход блока 28-15 поступает сигнал, пропорциональный температуре Т наружного воздуха на высоте Н полета самолета так, что выходной сигнал блока 28-15 переменных коэффициентов пропорционален плотности ρ воздуха на высоте полета. Выходной сигнал умножителя 11-19 пропорционален моменту крена MX (9).
Этот сигнал поступает на вход умножителя 11-9, на другой вход которого поступает выходной сигнал блока 28-15 переменных коэффициентов. На второй вход блока 28-15 поступает сигнал, пропорциональный температуре Т наружного воздуха на высоте Н полета самолета так, что выходной сигнал блока 28-15 переменных коэффициентов пропорционален плотности ρ воздуха на высоте полета. Выходной сигнал умножителя 11-19 пропорционален моменту крена MX (9).
Коммутатор 13 работает следующим образом. При выполнении условия (5) нормально замкнутые контакты 29-1 обеспечивают передачу сигнала с четвертого входа коммутатора 13 на его первый выход. Этим обеспечивается подключение выходного сигнала схемы 24 вычитания к делителю 14-1. Одновременно сигнал с первого входа коммутатора 13 через нормально замкнутые контакты 29-2, 29-3 поступает на его второй и третий выходы. Выходной сигнал делителя 14-1 поступает на функциональный преобразователь 18 и через дифференциатор 12-3 на блок 17-3 сравнения. Выходной сигнал с блока 15 памяти на втором входе коммутатора 13 отключен от третьего выхода. При невыполнении условия (5) на третий управляющий вход коммутатора 13 поступает сигнал со схемы 16 ИЛИ. Происходит синхронное переключение нормально замкнутых контактов 29-1, 29-2, 29-3. Это обеспечивает отключение выходного сигнала делителя 14-1 от третьего выхода коммутатора 13 и подключение к нему выходного сигнала блока 15 памяти. Сигнал на третий выход коммутатора 13 поступает со второго входа через нормально разомкнутые контакты 29-3.
Блок 26 управления работает следующим образом. Сигнал, пропорциональный углу δП отклонения предкрылков, поступает на первый вход блока 26 управления и далее на входы блоков 17-4, 17-5, 17-6 сравнения. Блоки 17-4, 17-5, 17-6 сравнения настроены соответственно на три возможных основных диапазона значений углов δП отклонения предкрылков механизации крылы: средний, нулевой и максимальный. Сигнал, пропорциональный углу δЗ отклонения закрылков, поступает на второй вход блока 26 управления и далее на входы блоков 17-7, 17-8, 17-9, 17-10 сравнения. Блоки 17-9, 17-7, 17-8, 17-10 сравнения настроены соответственно на четыре возможных основных диапазона значений углов δЗ отклонения закрылков механизации крыла: нулевой, минимальный, средний и максимальный. Пороги срабатывания блоков 17-4, 17-5, 17-6, 17-7, 17-8, 17-9, 17-10 сравнения перекрывают все диапазоны возможных значений соответственно углов δП, δЗ отклонения предкрылков и закрылков крыла. Основные комбинации углов δП, δЗ отклонений предкрылков и закрылков выделяются с помощью схем 30-1, 30-2, 30-3, 30-4 И. Эти комбинации влияют на значения переменных аэродинамических коэффициентов, реализованных в вычислителе 27 момента крена. В случае если сигнал, пропорциональный углу δП отклонения предкрылков, находится в среднем диапазоне значений и приводит к срабатыванию блока 17-4 сравнения, а сигнал, пропорциональный углу δЗ отклонения закрылков, находится также в среднем диапазоне значений и приводит к срабатыванию блока 17-8 сравнения, то выходные сигналы блоков 17-4, 17-8 сравнения, поступив на входы схемы 30-1 И, приведут к появлению сигнала на ее выходе. Этот сигнал поступает на первый выход шины u управления - выход блока 26 управления. Сигнал на первом выходе шины u управления соответствует взлетной конфигурации крыла самолета и соответствующим значениям переменных аэродинамических коэффициентов в вычислителе 27 момента крена. Если, сигнал пропорциональный углу δП отклонения предкрылков, находится в среднем диапазоне значений и приводит к срабатыванию блока 17-4 сравнения, а сигнал, пропорциональный углу δЗ отклонения закрылков, находится в минимальном диапазоне значений и приводит к срабатыванию блока 17-7 сравнения, то выходные сигналы блоков 17-4, 17-7 сравнения, поступив на входы схемы 30-2 И, приведут к появлению сигнала на ее выходе. Этот сигнал поступает на второй выход шины и управления - выход блока 26 управления. Сигнал на втором выходе шины u управления соответствует конфигурациям набора высоты и захода на посадку крыла самолета и соответствующим значениям переменных аэродинамических коэффициентов в вычислителе 27 момента крена. Если сигнал, пропорциональный углу δП отклонения предкрылков, находится в минимальном диапазоне значений и приводит к срабатыванию блока 17-5 сравнения, а сигнал, пропорциональный углу δЗ отклонения закрылков, находится в нулевом диапазоне значений и приводит к срабатыванию блока 17-9 сравнения, то выходные сигналы блоков 17-5, 17-9 сравнения, поступив на входы схемы 30-3 И, приведут к появлению сигнала на ее выходе. Этот сигнал поступает на третий выход шины и управления - выход блока 26 управления. Сигнал на третьем выходе шины u управления соответствует крейсерской конфигурации крыла самолета и соответствующим значениям переменных аэродинамических коэффициентов в вычислителе 27 момента крена. Если сигнал, пропорциональный углу δП отклонения предкрылков, находится в максимальном диапазоне значений и приводит к срабатыванию блока 17-6 сравнения, а сигнал, пропорциональный углу δЗ отклонения закрылков, находится также в максимальном диапазоне значений и приводит к срабатыванию блока 17-10 сравнения, то выходные сигналы блоков 17-6, 17-10 сравнения, поступив на входы схемы 30-4 И, приведут к появлению сигнала на ее выходе. Этот сигнал поступает на четвертый выход шины u управления - выход блока 26 управления. Сигнал на четвертом выходе шины u управления соответствует посадочной конфигурации крыла самолета и соответствующим значениям переменных аэродинамических коэффициентов в вычислителе 27 момента крена.
Блок 28-1,…28-18 переменного коэффициента работает следующим образом. Сигнал, пропорциональный параметру α, Н, М полета или углу отклонения аэродинамической поверхности, поступает на первый сигнальный вход блока 28-1,…,28-18 переменного коэффициента и далее на пятый вход усилителя 32-2 с переменным коэффициентом усиления и умножитель 11-20. На первый, второй, третий, четвертый управляющие входы усилителей 32-1, 32-2, 32-3 с переменным коэффициентом усиления по шине u управления поступают сигналы со второго управляющего входа блока 28-1,…,28-18 переменного коэффициента. Они формируются в блоке 26 управления и зависят от конфигурации крыла. На пятый сигнальный вход усилителя 32-1 с переменным коэффициентом усиления поступает постоянный сигнал с выхода источника 31 постоянного сигнала. При поступлении управляющего сигнала на один из управляющих входов усилителя 32-1 с переменным коэффициентом усиления его выходной сигнал изменяется так, чтобы соответствовать значению a0,j коэффициента аппроксимирующего полинома (11)-(16). С выхода усилителя 32-1 с переменным коэффициентом усиления сигнал поступает на первый вход сумматора 23-3. Синхронно выходной сигнал усилителя 32-2 с переменным коэффициентом усиления будет формировать зависимое от параметра х и управляющего сигнала на одном из управляющих входов значение a1,jx коэффициента аппроксимирующего полинома (11)-(16), который поступает на второй вход сумматора 23-3. Синхронно, по входному сигналу на пятом сигнальном входе усилителя 32-3 с переменным коэффициентом усиления, поступившему с выхода умножителя 11-20, будет формироваться зависимое от квадрата параметра x2 и управляющего сигнала на одном из управляющих входов значение a2,jx2 коэффициента аппроксимирующего полинома (11)-(16), который поступает на третий вход сумматора 23-3. Сумматор 23-3 объединяет три составляющие аппроксимирующего полинома и на его выходе получается сигнал, пропорциональный составляющей переменного коэффициента момента.
Как следует из вышеуказанного, достижение технического результата полетного контроля веса топлива самолета обеспечивается введением в устройство, принятое за прототип и содержащее датчик угла атаки, датчик числа Маха, датчик скорости, датчик высоты, датчик углов отклонения интерцепторов, датчик углов отклонения закрылков, датчик углов отклонения предкрылков, датчики скоростей крена, рыскания, тангажа, умножитель, коммутатор, делитель, блок памяти, схему ИЛИ, блоки сравнения, функциональный преобразователь, новых элементов, как то: датчика угла скольжения, датчика углов отклонения руля направления, датчика углов отклонения элеронов, датчика температуры, блока определения момента крена с вычислителем момента крена, второго умножителя и дифференциатора, второго сумматора на четыре входа со связями, указанными в формуле изобретения. Сопоставление параметров, характеризующих заявляемое изобретение и прототип, позволяет сделать вывод, что при большом числе совпадающих элементов и связей он не способен контролировать вес топлива. Аналоги способны контролировать вес топлива, но достоверная их работа обеспечивается лишь проверкой мостовых схем, следящих систем и указателя. В наиболее доверительной схеме комплексного топливомера с расходомером контроль веса топлива достигается значительным усложнением устройства, применением большого числа датчиков в пожароопасных отсеках топливной системы. Наиболее достоверна и точная наземная проверка с помощью контрольно-поверочной аппаратуры, но она длительная и возможна при демонтаже датчиков с пустыми баками самолета. Она существенно усложняет эксплуатацию самолета. Точность работы заявляемого устройства в наибольшей мере зависит от достижимой на современном этапе точности оценки аэродинамических параметров, которая составляет 3-5% [16, 17]. Оно способно для названных датчиков типового комплекса стандартного цифрового пилотажно-навигационного оборудования (КСЦПНО) надежно Р4(2)=0,999600, на среднем времени полета 2 часа, контролировать вес топлива. При этом достоверность обнаружения отказа топливомера типа СУИТ (Р1(2)=0,998824) здесь будет Рд4(2)=0,746416. Это соответствует среднему времени достоверного контроля Тд4=6,84 часа, что больше времени полета. Аналогичный показатель комплексного топливомера с суммирующим расходомером Рд2(2)=0,674411 и среднее время - Тд2(2)=5,08 часа. Важно, что в заявляемом устройстве можно достоверно контролировать именно вес (массу) топлива, а не его уровень в баках, как в классических топливомерах, со всеми известными методическими ошибками и сложностями выявления отказа топливной системы [2, 4]. Контроль веса через оценку момента инерции здесь позволяет оценивать и поперечную центровку самолета, контроль которой, например из-за отказов топливных насосов, актуален для безопасности полетов с учетом ряда катастроф [5, 18-20]. Физические свойства (плотность, температура) топлива на работоспособность устройства здесь, представляется, не имеют такого большого значения, как в классических топливомерах, измеряющих, например, жидкий газ [2]. Он обладает наибольшей полнотой охвата важнейших элементов топливной системы при наименьшем весе, так как используются датчики, шины передачи данных бортовой сети КСЦПНО. При реализации на борту имеет место параллельная с классической, полностью от нее независимая цепь контроля веса топлива и топливной системы на ином, по отношению к проверяемой, физическом принципе ее работы. Заявляемое устройство может снизить вес топливной системы, уменьшить количество избыточных датчиков в баках и топливопроводах, сопутствующих им электрических сигнальных цепей на крыле. Это повышает пожаробезопасность, поскольку аэрометрические, инерциальные датчики, применяемые в устройстве, удаленно расположены от баков и топливопроводов, которые в условиях повышенных вибраций, перегрузок, повышенных температур имеют течи тем с большей вероятностью, чем больше в них швов, установочных отверстий, в том числе и для классических топливомеров или для крыльчаток расходомеров. Для дальних самолетов (типа ТУ-95, ТУ-142 число баков более 100) значимость сокращения веса датчиков и сигнальных цепей, повышение достоверности контроля веса при высокой пожаробезопасности особенно важно. При современных характеристиках БЦВМ объем памяти, быстродействие и сложность программного обеспечения на языках высокого уровня не имеют существенного значения для реализации устройства, а совместно с прототипом оно позволяет на базе уже имеющегося на борту оборудования создать интегрированную систему оптимизации режимов полета повышенной надежности и эффективности.
Таким образом, приведенные сведения доказывают, что при осуществлении заявленного изобретения выполняются следующие условия:
- средство, воплощающее устройство-изобретение при его осуществлении, предназначено для использования в авиационной технике и, в частности, для комплексного контроля веса топлива систем управления пассажирских и транспортных самолетов классической схемы. Оно может использоваться для определения и контроля в полете текущего веса топлива самолета и его поперечной центровки;
- для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью описанных или других известных до даты подачи заявки средств;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить получение указанного технического результата.
Следовательно, заявленное изобретение соответствует условию патентоспособности «промышленная применимость».
Источники информации
1. Лещинер Л.Б., Ульянов И.Е. Проектирование топливных систем самолетов. М.: Машиностроение, 1975, 344 с.
2. Воробьев В.Г., Глухов В.В., Грохольский А.Л. и др. Авиационные приборы и измерительные системы. Учебн. для вузов ГА. Под ред. В.Г. Воробьева. М.: Транспорт, 1981, 391 с.
3. Голинкевич Т.А. Оценка надежности радиоэлектронной аппаратуры. М.: Сов. радио, 1969, 176 с.
4. Авиационные приборы. Под ред. С.С.Дорофеева. М.: Воен. издат., 1992, 496 с.
5. Орлов Б.А. Записки летчика-испытателя. М.: Авико Пресс, 1994, 171 с.
6. Смирнов Н.Н., Ицковиич А.А. Обслуживание и ремонт авиационной техники по состоянию. М.: Транспорт, 1987, 272 с.
7. Техническая эксплуатация авиационного оборудования: Учебн. для вузов / В.Г.Воробьев, В.Д.Константинов, В.Г.Денисов и др.; под ред. В.Г.Воробьева - М.: Транспорт, 1990, 296 с.
8. Динамика полета транспортных летательных аппаратов / Под ред. А.Я.Жукова. М.: Транспорт, 1996, 326 с.
9. Бутенин Н.В., Лунц Я.Л., Меркин Д.Р. Курс теоретической механики. Т.2. М.: Наука, 1971, 464 с.
10. Летные испытания самолетов / К.К.Васильченко, В.А.Леонов, И.М.Пашковский, Б.К.Поплавский. М.: Машиностроение, 1996, 720 с.
11. Катков М.С. Непрерывные системы адаптивного управления с идентификаторами. М.: МНИ, Мир книги, 1992, 386 с.
12. Аналоговые и цифровые интегральные микросхемы: Справочное пособие/ Под ред. С.В.Якубовского. М.: Радио и связь, 1984, 432 с.
13. Авионика России. Энциклопедический справочник / Под общ. ред. С.Д.Бодрунова. СПб. Национальная Ассоциация авиаприборостроителей, 1999 г., с.780.
14. Алтухов В.Ю., Стадник В.В. Гироскопические приборы, автоматические бортовые системы управления самолетов и их техническая эксплуатация. М.: Машиностроение, 1991, 160 с.
15. Галуненко А.В., Годунов В.А., Грошев В.В., Панич В.П., Стрелков В.Т. Вычислительная система самолетовождения // Мир авионики, 2005, №2, с.48-50.
16. Зайцева Н.Н. Пассажирский самолет ЭРБАС ИНДАСТРИ A310. М.: ЦАГИ, 1990, 115 с.
17. Зайцева Н.Н. Пассажирский самолет ЭРБАС ИНДАСТРИ А320. М.: ЦАГИ, 1993, 104 с.
18. www.nnews.ru/2001/7/5/russia/869.php3
19. http://vfnik.chat.ru/1990k.htm
20. http://vfnik.chat.ru/1995k.htm
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА НАГРУЗКИ САМОЛЕТА | 2003 |
|
RU2260179C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| ТОПЛИВОМЕР | 1991 |
|
RU2019794C1 |
| Устройство определения и индикации углов крена самолета | 1991 |
|
SU1827361A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В ПРОДОЛЬНОМ КАНАЛЕ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ | 2022 |
|
RU2833735C2 |
| БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ И ИЗМЕРЕНИЯ ТОПЛИВА С КОМПЕНСАЦИЕЙ ПО ДИЭЛЕКТРИЧЕСКОЙ ПРОНИЦАЕМОСТИ ТОПЛИВА | 2013 |
|
RU2532964C2 |
| БОРТОВАЯ СИСТЕМА КОНТРОЛЯ ТОПЛИВА С КОМПЕНСАЦИЕЙ ПО ДИЭЛЕКТРИЧЕСКОЙ ПРОНИЦАЕМОСТИ ТОПЛИВА | 2013 |
|
RU2532968C2 |
| БОРТОВАЯ ТОПЛИВОМЕРНО-РАСХОДОМЕРНАЯ СИСТЕМА С КОМПЕНСАЦИЕЙ ПО ТЕМПЕРАТУРЕ И ДИЭЛЕКТРИЧЕСКОЙ ПРОНИЦАЕМОСТИ ТОПЛИВА | 2012 |
|
RU2533950C2 |
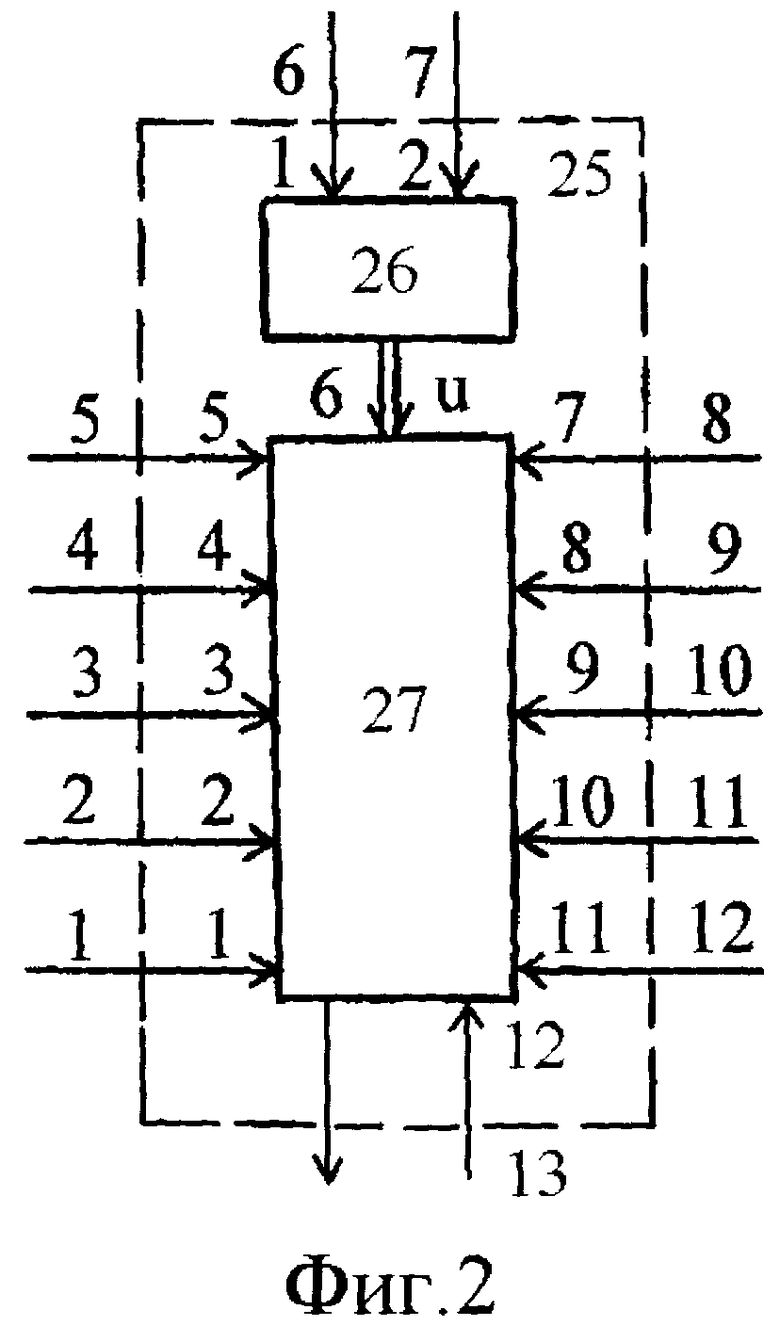
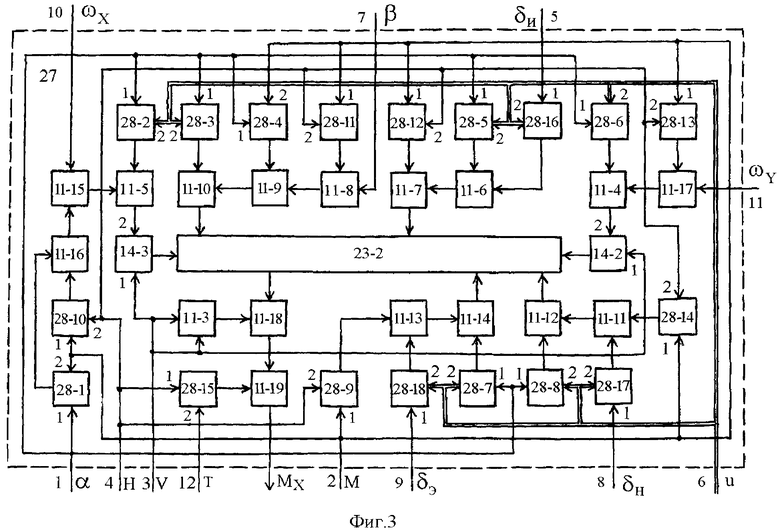
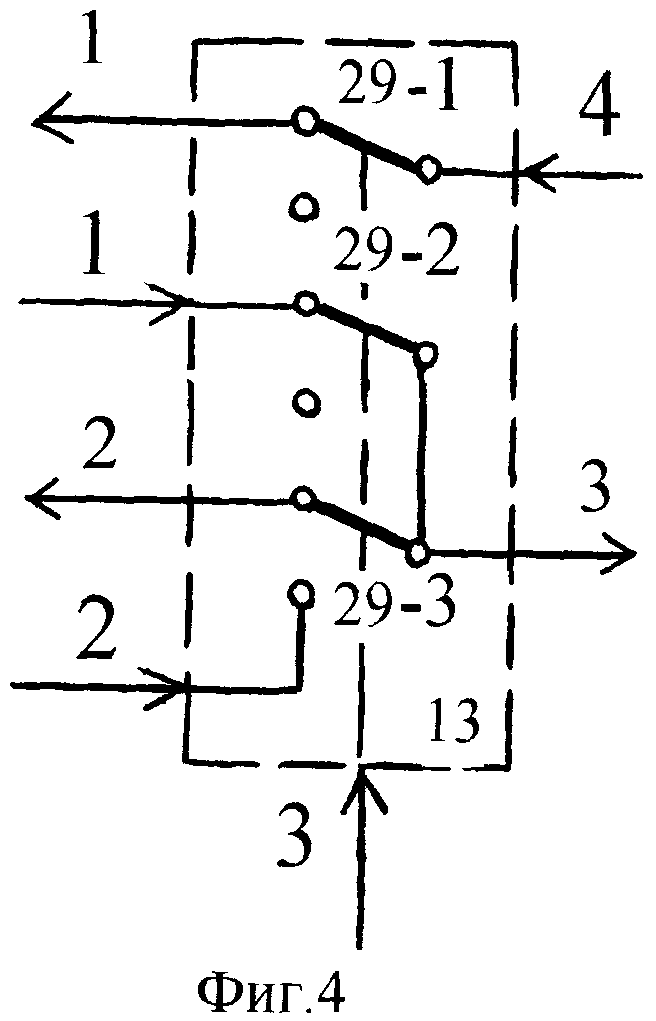
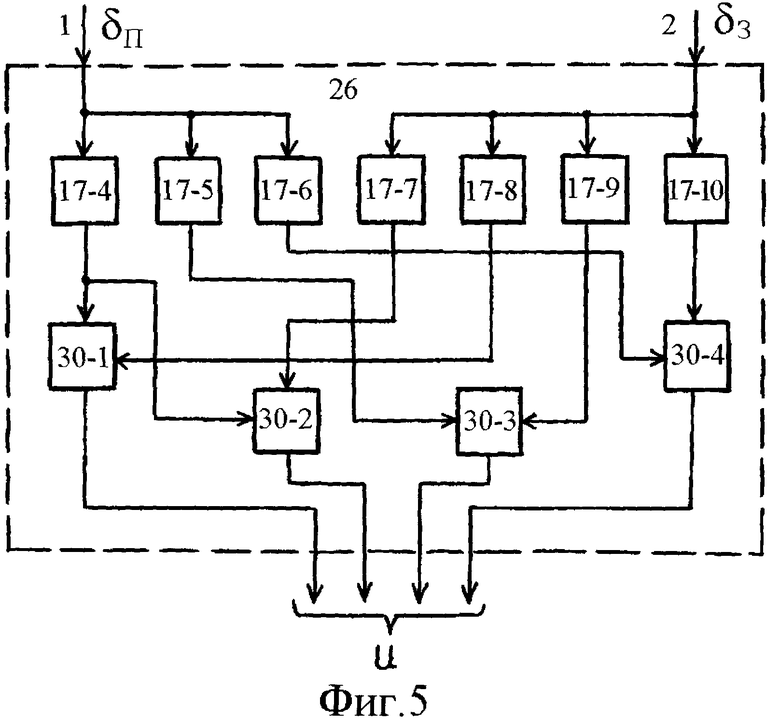
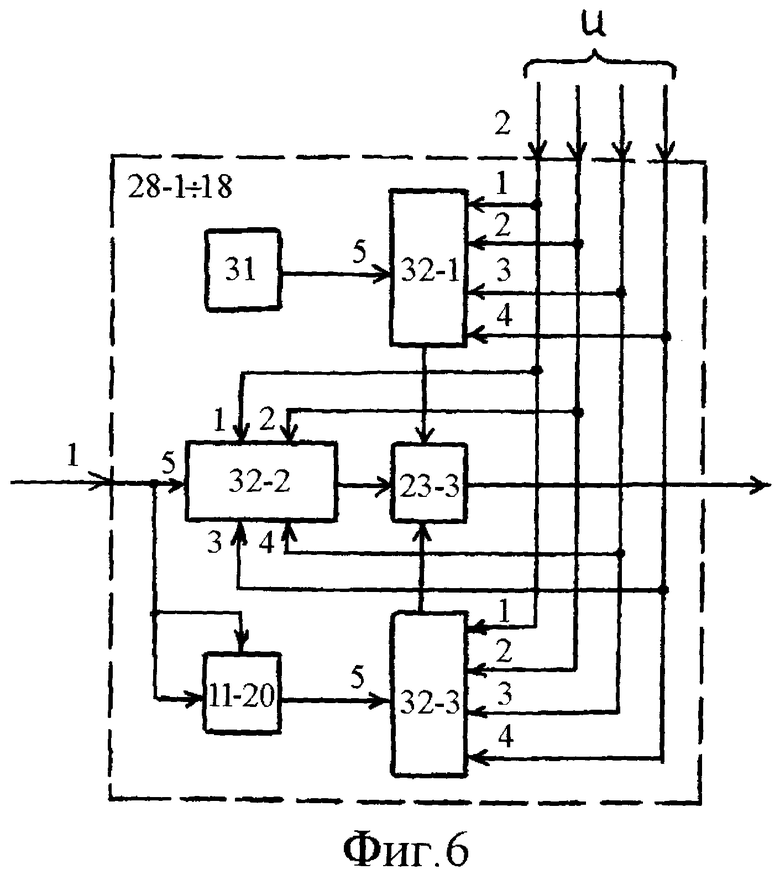
Изобретение относится к области авиационной техники и, в частности, к системам комплексного контроля веса и центровки пассажирских и транспортных самолетов классической схемы, у которых топливо расположено в крыле, а нагрузка в фюзеляже. Устройство для полетного контроля веса топлива самолета содержит в себе датчики угла атаки, числа Маха, высоты, углов отклонения интерцепторов, углов отклонения закрылков, углов отклонения предкрылков, скорости крена, скорости тангажа и скорости рыскания, который соединен с входом умножителя, дифференциатор, коммутатор, вход которого соединен с выходом делителя. Коммутатор соединен с блоком памяти, вход которого, соединен с выходом схемы ИЛИ, входы которой соединены с блоками сравнения. Кроме того, коммутатор соединен с функциональным преобразователем, где совместно с блоком сравнения ведется оценка веса топлива и центровки самолета. Также блок сравнения содержит связи с датчиками аэродинамических показателей, угловых движений самолета, отклонения рулей, умножителем, дифференциаторами, схемой вычитания, сумматором и блоком определения момента крена. Заявленное техническое решение направлено на повышение достоверности и точности контроля веса топлива, повышение надежности и безопасности полета, улучшение эксплуатационных характеристик самолета. 2 з.п. ф-лы, 6 ил.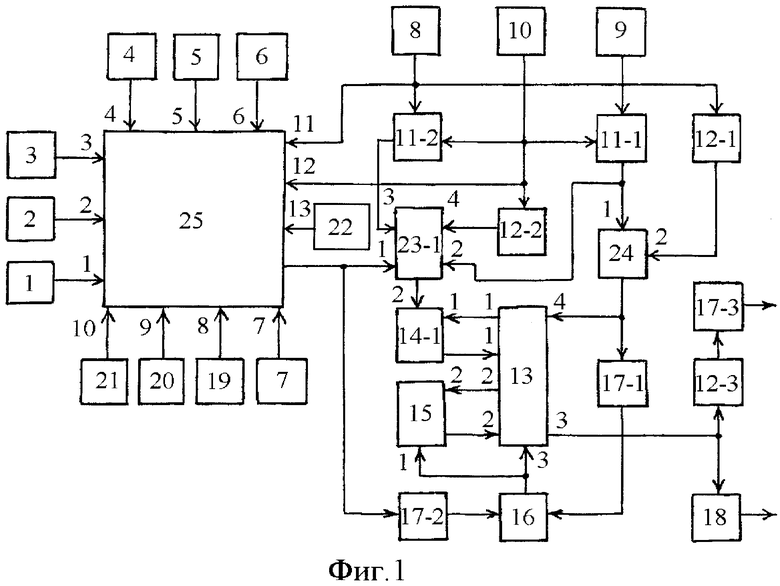
1. Устройство для полетного контроля веса топлива самолета, содержащее датчик угла атаки, датчик числа Маха, датчик скорости, датчик высоты, датчик углов отклонения интерцепторов, датчик углов отклонения закрылков, датчик углов отклонения предкрылков, датчик скорости крена, датчик скорости тангажа и датчик скорости рыскания, выход которого соединен с входом умножителя, дифференциатор, коммутатор, первый вход которого соединен с выходом делителя, первым входом соединенного с первым выходом коммутатора, второй вход коммутатора соединен с выходом блока памяти, первый вход которого, как и третий вход коммутатора, соединен с выходом схемы ИЛИ, входы которой соединены с выходами первого и второго блока сравнения, второй выход коммутатора соединен со вторым входом блока памяти, третий выход коммутатора соединен с входом функционального преобразователя, третий блок сравнения, отличающееся тем, что в него введены датчик угла скольжения, датчик углов отклонения руля направления, датчик углов отклонения элеронов, второй умножитель, второй и третий дифференциаторы, схема вычитания, сумматор на четыре входа, блок определения момента крена, первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый и тринадцатый входы которого соединены соответственно с выходами датчике угла атаки, датчика числа Маха, датчика скорости, датчика высоты, датчика углов отклонения интерцепторов, датчика углов отклонения закрылков, датчика углов отклонения предкрылков, датчика угла скольжения, датчика углов отклонения руля направления, датчика углов отклонения элеронов, датчика скорости крена, датчика скорости рыскания, датчика температуры, причем выход датчика скорости рыскания соединен со входом второго умножителя и входом второго дифференциатора, выход датчика скорости крена соединен с первым дифференциатором и вторым умножителем, выход блока определения момента крена соединен с первым суммирующим входом сумматора и входом второго блока сравнения, второй вычитающий вход сумматора, как и первый вычитающий вход схемы вычитания соединен с выходом первого умножителя, второй вход которого соединен с выходом датчика скорости тангажа, третий вычитающий вход сумматора соединен с выходом второго умножителя, четвертый суммирующий вход сумматора соединен с выходом второго дифференциатора, выход сумматора соединен со вторым входом делителя, выход первого дифференциатора соединен с суммирующим входом схемы вычитания, выход которой соединен с входами первого блока сравнения и четвертым входом коммутатора, вход третьего дифференциатора соединен с третьим выходом коммутатора, а выход - со входом третьего блока сравнения.
2. Устройство для полетного контроля веса топлива самолета по п.1, отличающееся тем, что блок определения момента крена содержит блок управления и вычислитель момента крена, первый, второй, третий, четвертый, пятый входы которого соединены соответственно с первым, вторым, третьим, четвертым, пятым входами блока определения момента крена, шестой и седьмой входы которого соединены соответственно с первым и вторым входами блока управления, выход которого образует шину управления, соединенную с шестым входом вычислителя момента крена, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый входы которого соединены соответственно с восьмым, девятым, десятым, одиннадцатым, двенадцатым, тринадцатым входами блока определения момента крена, выход которого является выходом вычислителя момента крена.
3. Устройство для полетного контроля веса топлива самолета по п.2, отличающееся тем, что вычислитель момента крена содержит восемнадцать блоков переменных коэффициентов, семнадцать умножителей, два делителя и сумматор так, что первый вход вычислителя момента крена соединен с первыми входами первого, второго, третьего, четвертого, пятого, шестого, седьмого, восьмого блоков переменных коэффициентов, второй вход вычислителя момента крена соединен с первыми входами девятого, десятого, одиннадцатого, двенадцатого, тринадцатого, четырнадцатого блоков переменных коэффициентов и вторыми входами первого, четвертого блоков переменных коэффициентов, третий вход вычислителя момента крена соединен с двумя входами третьего умножителя, первыми входами второго и третьего делителя, вторые входы которых соединены соответственно с выходами четвертого и пятого умножителей, выходы второго и третьего делителя соединены с входами второго сумматора, четвертый вход вычислителя момента крена соединен со вторыми входами девятого, десятого, одиннадцатого, двенадцатого, тринадцатого, четырнадцатого блоков переменных коэффициентов и первым входом пятнадцатого блока переменных коэффициентов, пятый вход вычислителя момента крена соединен с первым входом шестнадцатого блока переменных коэффициентов, второй вход которого, как и вторые входы второго, третьего, пятого, шестого, седьмого, восьмого блоков переменных коэффициентов, соединен с шестым входом вычислителя момента крена, а выход - с входом шестого умножителя, второй вход которого соединен с выходом пятого блока переменных коэффициентов, а выход - с входом седьмого умножителя, второй вход которого соединен с выходом двенадцатого блока переменных коэффициентов, выход седьмого умножителя соединен с входом второго сумматора, седьмой вход вычислителя момента крена соединен с первым входом восьмого умножителя, второй вход которого соединен с выходом одиннадцатого блока переменных коэффициентов, а выход - с первым входом девятого умножителя, второй вход которого соединен с выходом четвертого блока переменных коэффициентов, выход девятого умножителя соединен с первым входом десятого умножителя, второй вход которого соединен с выходом третьего блока переменных коэффициентов, выход десятого умножителя соединен с входом второго сумматора, восьмой вход вычислителя момента крена соединен с первым входом семнадцатого блока переменных коэффициентов, второй вход которого соединен с шестым входом вычислителя момента крена, а выход - с входом одиннадцатого умножителя, второй вход которого соединен с выходом четырнадцатого блока переменных коэффициентов, выход одиннадцатого умножителя соединен с первым входом двенадцатого умножителя, второй вход которого соединен с выходом восьмого блока переменных коэффициентов, а выход - с входом второго сумматора, девятый вход вычислителя момента крена соединен с первым входом восемнадцатого блока переменных коэффициентов, второй вход которого соединен с шестым входом вычислителя момента крена, а выход - с тринадцатым умножителем, второй вход которого соединен с выходом девятого блока переменных коэффициентов, выход тринадцатого умножителя соединен с первым входом четырнадцатого умножителя, второй вход которого соединен с выходом седьмого блока переменных коэффициентов, а выход - с входом второго сумматора, десятый вход вычислителя момента крена соединен с первым входом пятнадцатого умножителя, второй вход которого соединен с выходом шестнадцатого умножителя, а выход - с первым входом пятого умножителя, второй вход которого соединен с выходом второго блока переменных коэффициентов, первый вход шестнадцатого умножителя соединен с выходом первого блока переменных коэффициентов, второй вход - с выходом десятого блока переменных коэффициентов, одиннадцатый вход вычислителя момента крена соединен с входом семнадцатого умножителя, второй вход которого соединен с выходом тринадцатого блока переменных коэффициентов, а выход - с первым входом четвертого умножителя, второй вход четвертого умножителя соединен с выходом шестого блока переменных коэффициентов, выход второго сумматора соединен с входом восемнадцатого умножителя, второй вход которого соединен с выходом третьего умножителя, а выход, как и выход пятнадцатого блока переменных коэффициентов, вторым входом подключенного к двенадцатому входу вычислителя момента крена, соединен с входом девятнадцатого умножителя, выход девятнадцатого умножителя является выходом вычислителя момента крена.
| Авионика России | |||
| Энциклопедический справочник / Под общ | |||
| Ред | |||
| С.Д.Бодрунова, СПб.: Национальная Ассоциация авиаприборостроителей, 1999, стр.780 | |||
| RU 2003134245 А, 27.05.2005 | |||
| US 4814993 А, 21.03.1989 | |||
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА НАГРУЗКИ САМОЛЕТА | 2003 |
|
RU2260179C1 |
| US 4325123 A, 13.04.1982. | |||

