Изобретение относится к комплексному контролю систем управления подвижных аппаратов и обеспечению устойчивости их движения в условиях действия на аппарат внешних и внутренних возмущающих воздействий. Оно может быть использовано для контроля устойчивости и управления летательными аппаратами, кораблями, подводными лодками, космическими объектами. В частности, для самолета изобретение позволяет определять в полете величину и направление смещения центра масс аппарата, возникшего из-за нарушения правил его загрузки, самопроизвольного перемещения груза, отказов топливной системы и несимметрии выработки топлива из баков, сброса грузов и т.д., а также управлять отклонением рулей при небольших значениях этого смещения. Актуальность определения смещения центра масс-центровки летательных аппаратов подтверждает статистика авиакатастроф, где данный фактор имеет первостепенное значение [1, 2].
Известен способ определения величины и направления смещения центра масс, основанный на вычислении положения точки равнодействующей сил тяжести отдельных элементов конструкции аппарата [3, с. 331; 4, с. 137]. В строительных осях аппарата располагают центровочный чертеж конструкции с координатами центра масс и возможными перемещениями каждого составляющего элемента конструкции, топлива, возможного груза. Измеряют расстояния от центров масс каждого элемента до точки начала строительных осей аппарата, вес каждого элемента и вес всего аппарата, в целом, а затем судят о координатах центра масс, величине и направлении смещения по соотношениям:
где X, Y, Z -искомые координаты центра масс аппарата;
Xi, Yi, Zi -расстояния от центра масс i-го элемента до точки начала строительных осей системы координат фюзеляжа;
σi - вес каждого элемента конструкции, груза, топлива аппарата;
Σσi - вес всего аппарата в целом.
На практике считается, что на устойчивость движения летательного аппарата влияет лишь смещение центра масс вдоль продольной строительной оси [5, с. 231]. Поэтому в процессе эксплуатации самолета контроль положения центра масс проводят с учетом расположения грузов по продольной оси. При этом используются специальные центровочные графики [3, с. 334, 5, с. 223; 6, с. 111]. Они содержат сведения о фактической загрузке самолета, местоположении груза вдоль продольной оси и получаемой при этом центровке - координатах центра масс, выраженной в процентах средней аэродинамической хорды крыла. Определение величины, направления и возможного смещения центра масс здесь проводится по вышеприведенным соотношениям, но процесс расчета упрощен и формализован. Сложная задача определения основного фактора безопасности полета документирована по косвенным данным, влияющим на реальное состояние устойчивости. Это обусловлено важностью предельной загрузки самолета, при которой центр масс должен находиться в строго обозначенных пределах. Способ прост в применении, повсеместно распространен для определения предполагаемого местоположения центра масс на самолетах, кораблях и других подвижных объектах. Однако он не отражает истинного положения с устойчивостью аппарата. Это связано с перемещением грузов, неравномерностью выработки топлива из баков, изменением конфигурации аппарата и т.д., особенно в процессе полета, когда предполетные расчетные условия центровки нарушаются. Например, из-за случайных отказов топливной системы, перемещений грузов или нештатной конфигурации аппарата. Характерным примером может быть отказ системы симметричной выработки топлива из правого и левого топливных баков крыла самолета [1, с. 25] . Способ невозможно применить для определения в полете истинного положения центра масс и использовать для управления аппаратом.
Известен приближенный способ определения величины и направления смещения центра масс самолета в полете по углам отклонения рулевых поверхностей, при которых уравновешиваются моменты сил относительно центра масс [7, с. 9-15]. Способ основан на известных балансировочных соотношениях углов отклонения рулей самолета в установившемся режиме полета, которые зависят от скорости, высоты полета, массы, центровки, аэродинамической асимметрии и конфигурации самолеты. Величина и направление смещения центра масс в этом случае косвенно оцениваются летчиком по индикаторам отклонения рулей, например типа ИН-3 [7, с. 84; 8, с. 95-99]. Способ имеет неоднозначную взаимосвязь смещения центра масс с измеряемыми углами, что затрудняет его практическое использование особенно неопытными летчиками.
Известен способ (прототип) определения величины и направления смещения центра масс самолеты взвешиванием с использованием специальных двухплатформенных весов [9, с. 77]. Известный способ позволяет определить фактическое положение центра масс, а также определить закон изменения положения центра масс при выработке топлива и изменении загрузки самолета. Измерения параметров аппарата проводят в ангаре на специальных весах с использованием нивелира, отвесов, измерительной рулетки, нивелировочной линейки, а также специальных стремянок и подъемного крана. Способ основывается на известном из механики положении, что центр масс твердого тела является той точкой, через которую всегда проходит равнодействующая сил тяжести, независимо от ориентации тела в пространстве, а направление равнодействующей при этом совпадает с местной земной вертикалью. Это дает возможность найти центр масс путем взвешивания самолета на специальных двухплатформенных весах при двух-трех его положениях относительно этой земной вертикали для каждого из заданных вариантов его загрузки. При этом основные колеса шасси аппарата установлены на одной платформе, а носовое колесо - на другой платформе весов. Определяют направление линий действия равнодействующей силы тяжести в связанной с самолетом системе координат для каждого его углового положения при взвешивании. В точке пересечения линий находят координаты центра масс самолета в его плоскости симметрии. Для определения смещения центра масс в поперечном направлении от плоскости симметрии аналогичные построения проводят, когда раздельно измеряют силы, действующие на правое и левое колесо основных стоек шасси, и одновременно измеряются расстояния от плоскости симметрии самолета до точек опоры этих колес. Все манипуляции с самолетом как в первом, так и во втором случае проводятся с помощью подъемного крана. Способ точный, но весьма трудоемкий, его реализация возможна только в наземных условиях и требует применения специального громоздкого оборудования. Изменение положения центра масс, определяемое способом, носит заведомо известный характер по отношению к ограниченному числу дестабилизирующих факторов. Оценка положения центра масс в полете невозможна. Способ применим на стадии испытаний новых самолетов. Для определения центра масс крупногабаритных аппаратов необходимо создание сложного оборудования.
Известно устройство определения величины и направления смещения центра масс самолета, содержащее индикатор положения управляющих поверхностей - рулей высоты, направления, крена, вход которого через фазочувствительный преобразователь соединен с датчиками обратной связи на рулевых агрегатах этих управляющих поверхностей [7, с. 15- 17, 84; 8, с. 47-48, 95-99, рис. 121]. Устройство простое и обладает высокой надежностью. Оно индицирует положение рулей самолета, которое в установившемся полете зависит от параметров полета и центровки самолета. Однако взаимосвязь положения центра масс аппарата с положением его рулей здесь имеет неоднозначную зависимость. Точность определения смещения низкая.
Известно устройство (прототип) определения величины и направления смещения центра масс аппарата, содержащее датчики нагрузки стоек шасси силой тяжести в статическом положении [9, с. 77; 10, с. 108]. Зная геометрические размеры шасси и их взаимное положение, несложно определить линию возможного положения центра масс аппарата. На практике определяют не положение центра масс, а так называемое обжатие стоек шасси (амортизаторов стоек), то есть их допустимое сжатие при известной массе полезной нагрузки и декларируемой центровке самолета. Недостатком известного устройства, выбранного за прототип, является невозможность его применения для определения величины и направления смещения центра масс в полете. Измерение носит весьма приближенный, косвенный характер, а положение центра масс в вертикальном направлении, по нормальной оси связанной системы координат вообще не измеряется.
Основной задачей, на решение которой направлены заявленные способ и устройство, является определение величины и направления смещения центра масс аппарата в полете при любых параметрах его ориентации, изменении конфигурации аппарата, перемещении грузов, действии на него внешних и внутренних возмущений. Сопоставление величины и направления смешения центра масс с допустимыми значениями позволяет решить техническую задачу контроля и обеспечения безопасности полета. Измерение в полете величины и направления смешения центра масс позволяет управлять его движением с учетом точного значения центровки, что открывает новые возможности создания высокоманевренных и экономичных подвижных объектов.
Единым техническим результатом, достигаемым при осуществлении заявленной группы изобретений, является создание комплексных систем управления и контроля с высокими технико-экономическими показателями.
Указанный технический результат достигается тем, что в известном способе-прототипе определения величины и направления смещения центра масс аппарата, основанном на измерении параметров аппарата, согласно изобретению измеряют текущие величину и направление абсолютной угловой скорости, ускорения силы тяжести, кажущегося линейного ускорения, текущие углы тангажа и крена, после чего определяют величину и направление абсолютного линейного ускорения аппарата, суммируя кажущееся линейное ускорение и ускорение силы тяжести в точке местоположения аппарата, затем определяют величину и направление приращения абсолютного линейного ускорения аппарата по отношению к абсолютному линейному ускорению аппарата в его центре масс, величину и направление угловой скорости и углового ускорения аппарата относительно его центра масс, после чего определяют величину и направление смещения центра масс согласно соотношению:
где ρ - величина смещения центра масс аппарата, м.;
ω - величина угловой скорости аппарата относительно его центра масс, 1/с;
Δ W - величина приращения абсолютного линейного ускорения аппарата по отношению к абсолютному линейному ускорению аппарата в его центре масс, м/с2;
t - время, с.
Сущность способа определения величины и направления смещения центра масс аппарата состоит в нахождении взаимосвязи приращения абсолютного линейного ускорения аппарата в его произвольной точке по отношению к ускорению его центра масс с величиной и направлением смещения этой точки от центра масс аппарата в процессе движения. При этом движение аппарата рассматривается как сумма поступательного движения центра масс и относительного углового движения вокруг центра масс [11, с. 368; 12, c. 17 ]. Тогда абсолютное линейное ускорение в произвольной точке аппарата (фиг. 1) по теореме Кориолиса [11, с. 97] определяется векторным выражением:
где WA - величина вектора  абсолютного линейного ускорения аппарата в произвольной точке A (фиг. 1), м/с2;
абсолютного линейного ускорения аппарата в произвольной точке A (фиг. 1), м/с2;
WO - величина вектора  абсолютного линейного ускорения аппарата в точке O начала подвижной системы координат O X1 Y1 Z1, связанной с его центром масс, м/с2;
абсолютного линейного ускорения аппарата в точке O начала подвижной системы координат O X1 Y1 Z1, связанной с его центром масс, м/с2;
ω - величина вектора  абсолютной угловой скорости аппарата, 1/с;
абсолютной угловой скорости аппарата, 1/с;
dω /dt - величина вектора  абсолютного углового ускорения аппарата, 1/с2;
абсолютного углового ускорения аппарата, 1/с2;
ρ - величина вектора  смещения центра масс по отношению к точке A, м;
смещения центра масс по отношению к точке A, м;
t - время, с.
Преобразовав выражение (3) к виду классического дифференциального уравнения относительно неизвестного смещения  , получаем:
, получаем:
где  - величина и направление, то есть вектор приращения абсолютного линейного ускорения аппарата в точке A по отношению к абсолютному линейному ускорению в его центре масс - точке O.
- величина и направление, то есть вектор приращения абсолютного линейного ускорения аппарата в точке A по отношению к абсолютному линейному ускорению в его центре масс - точке O.
Величину и направление абсолютного линейного ускорения аппарата определяют с помощью акселерометра, расположенного в произвольной точке A. Последний измеряет кажущееся ускорение  [13, с. 79], равное
[13, с. 79], равное
где  - величина и направление ускорения силы тяжести. Поэтому для определения
- величина и направление ускорения силы тяжести. Поэтому для определения  суммируют кажущееся ускорение
суммируют кажущееся ускорение  с измеренным ускорением силы тяжести
с измеренным ускорением силы тяжести  , тогда:
, тогда:
Величина ускорения силы тяжести зависит от точки местоположения аппарата, а направление - от его ориентации относительно Земли, определяемой углами тангажа и крена ϑ,γ [12, с. 33; 14, с. 74]: Проекции вектора ускорения силы тяжести на оси подвижной системы координат имеют вид:
где [...]' - знак транспонирования матрицы - строки.
Измерение величины и направления ускорения силы тяжести  возможно гравиметром. Абсолютную угловую скорость измеряет датчиком угловых скоростей. Углы тангажа и крена, так же как координаты точки местоположения аппарата, измеряются инерциальной навигационной системой, в которую входят и датчик угловых скоростей и акселерометр [8, с. 146].
возможно гравиметром. Абсолютную угловую скорость измеряет датчиком угловых скоростей. Углы тангажа и крена, так же как координаты точки местоположения аппарата, измеряются инерциальной навигационной системой, в которую входят и датчик угловых скоростей и акселерометр [8, с. 146].
Указанный технический результат достигается также тем, что в способе определения величины и направления смещения центра масс аппарата измерение величины и направления абсолютного углового ускорения осуществляют, предварительно измеряя величину и направление абсолютной угловой скорости аппарата, затем по окончании периода времени меньшего периода собственных короткопериодических составляющих угловых колебаний аппарата относительно его центра масс измеряют величину и направление приращения абсолютной угловой скорости и запоминают их. После чего определяют величину и направление абсолютного углового ускорения аппарата по скорости приращения абсолютной угловой скорости за период времени, меньший периоду времени собственных короткопериодических составляющих угловых колебаний аппарата относительно его центра масс. Измерение величины ускорения силы тяжести осуществляют также по углу, широте и высоте точки местоположения аппарата [15, с. 791] согласно соотношению:
g = 9,78049(1+5,288•10-3sin2 ϕ ) - 3,086•10-6 H, (8)
где g - величина ускорения силы тяжести в точке местоположения аппарата, м/с2,
ϕ - широта местоположения аппарата, угл. град.;
H - высота местоположения аппарата над поверхностью Земли, м.
В отличие от гравиметрического измерения ускорения силы тяжести его определение по выражению (8) предпочтительно при наличии на аппарате инерциальной навигационной системы. Величину и направление приращения абсолютного линейного ускорения аппарата по отношению к абсолютному линейному ускорению аппарата в его центре масс, угловой скорости и углового ускорения аппарата относительно его центра масс определяют узкополосно, фильтруя на частоте собственных периодических составляющих угловых колебаний аппарата относительно его центра масс сигналы, пропорциональные соответственно абсолютному линейному ускорению аппарата, абсолютной угловой скорости и абсолютному угловому ускорению аппарата. При этом учитывается известное распределение частот углового движения аппарата [5, с. 172; 12, с. 27; 16, с. 106 и др.]. Фильтрация сигналов обеспечивает выделение короткопериодических составляющих углового движения аппарата, которое происходит вокруг центра масс [11, с. 368; 15, с. 843 и др.]. Длиннопериодические составляющие углового движения аппарата, связанные с движением его центра масс, подавляются.
Указанный технический результат достигается также тем, что в способе определения величины и направления смещения центра масс аппарата величину и направление приращения абсолютного линейного ускорения аппарата по отношению к абсолютному линейному ускорению аппарата в его центре масс можно определять также по разности абсолютного линейного ускорения аппарата и абсолютного линейного ускорения аппарата в его центре масс, измеренного по ускорению аппарата относительно Земли. При этом используются измерения навигационных параметров линейного перемещения аппарата, которые определяют движение его центра масс [17, 18, 19]. Измерение величины и направления абсолютного линейного ускорения центра масс аппарата с помощью навигационной системы возможно либо непосредственно [18, с. 111], либо при двойном дифференцировании линейных координат местоположения аппарата [17, с. 36-37], либо при однократном дифференцировании его линейных скоростей [22. , с. 106-108, 23 с. 198] , либо через значения линейных и угловых скоростей, измеренных в связанных осях аппарата [20, с. 263, 318]. Поскольку спектральные характеристики измерений навигационных параметров линейного перемещения аппарата существенно отличаются от спектральных характеристик измерений акселерометра, то выделение величины и направления приращения абсолютного линейного ускорения от углового движения аппарата представляется несложным. Разность абсолютного линейного ускорения, измеренного акселерометром, и ускорения, измеренного по сигналам навигационной системы, является высокочастотной составляющей сигнала акселерометра.
Указанный технический результат достигается тем, что в устройстве для определения величины и направления смещения центра масс аппарата, содержащем средство измерения ускорения силы тяжести, средство измерения ускорения силы тяжести выполнено в виде датчика ускорения силы тяжести, оно также содержит последовательно соединенные акселерометр, первый сумматор, первый частотный селектор, блок текущих координат центра масс, последовательно соединенные датчик ускорения силы тяжести и блок определения составляющих ускорения силы тяжести, второй вход которого соединен с выходом датчика тангажа, третий вход - с выходом датчика крена, а выход - со вторым входом первого сумматора, и последовательно соединенные датчик угловых скоростей и второй частотный селектор, выход которого соединен со вторым входом блока текущих координат центра масс, выход которого образует выходную шину смещения центра масс.
Сущность изобретения состоит в определении на аппарате смещения его центра масс по величине и направлению приращения абсолютного линейного ускорения, измеренного акселерометром в его произвольной точке, при его угловом движении относительно центра масс. При этом параметры углового движения - угловая скорость и угловое ускорение определяются по сигналам датчика угловых скоростей аппарата. Поскольку координаты точки установки акселерометра на аппарате фиксированы в системе координат фюзеляжа [23, с. 90], то несложно определить и общепринятое смещение центра масс относительно средней аэродинамической хорды крыла [5, с. 231], в том числе в процентах. При этом с помощью датчиков тангажа, крена и ускорения силы тяжести предварительно определяется величина и направление ускорения силы тяжести, а с помощью акселерометра - кажущееся линейное ускорение в точке установки акселерометра. Суммируя кажущееся ускорение и ускорение силы тяжести, получаем величину и направление абсолютного линейного ускорения аппарата. Затем определяется приращение абсолютного линейного ускорения аппарата из-за его углового движения. Для этого из всего частотного спектра сигналов абсолютного линейного ускорения, с помощью первого частотного селектора выделяется составляющая на частоте высокочастотных - короткопериодических угловых колебаний аппарата. Аналогично из всего спектра абсолютных угловых скоростей аппарата, измеренных датчиком угловых скоростей, с помощью второго частотного селектора выделяется составляющая сигнала на этой же частоте. Сигналы, пропорциональные приращению абсолютного линейного ускорения и селектированным значениям угловых скоростей аппарата, поступают в блок текущих координат центра масс, где производится формирование составляющих и коэффициентов уравнения (2) с последующим его решением относительно величины и направления смещения центра масс аппарата.
Указанный технический результат достигается также тем, что устройство для определения величины и направления смещения центра масс аппарата дополнительно содержит последовательно соединенные задатчик конструктивных координат акселерометра и первый блок вычитания, второй вход которого соединен с выходной шиной смещения центра масс, а выход образует шину отклонения смещения центра масс. При этом определяется отклонение смещения центра масс  от заданного значения смещения центра масс
от заданного значения смещения центра масс  , связанного с конкретным значением центровки для данного типа аппарата и произвольных координатах точки расположения акселерометра на этом аппарате. Для самолета отклонение смещения центра может быть выражено в общепринятых единицах измерения - процентах средней аэродинамической хорды (САХ) крыла.
, связанного с конкретным значением центровки для данного типа аппарата и произвольных координатах точки расположения акселерометра на этом аппарате. Для самолета отклонение смещения центра может быть выражено в общепринятых единицах измерения - процентах средней аэродинамической хорды (САХ) крыла.
Указанный технический результат достигается также тем, что в устройстве для определения величины и направления смещения центра масс аппарата датчик ускорения силы тяжести содержит последовательно соединенные датчик широты, первый функциональный преобразователь и второй сумматор, второй суммирующий вход которого соединен с выходом датчика высоты, а третий вычитающий вход - с выходом задатчика эталонного значения ускорения силы тяжести, а выход - с выходом датчика ускорения силы тяжести. При этом вычисляется величина ускорения силы тяжести по выражению (8). Вместо гравиметрического определения величины ускорения силы тяжести используется приближенное выражение, в котором ускорение силы тяжести получается с точностью, достаточной для определения смещения центра масс аппарата [15, с. 791]:
g = 9,78049(1+5,288•10-3)sin2 ϕ )-3,086 •10-6 H, (9)
где g - величина ускорения силы тяжести в точке местоположения аппарата, м/с2;
ϕ - широта местоположения аппарата, угл. град.;
H - высота местоположения аппарата над поверхностью Земли, м.
Первый функциональный преобразователь реализует функцию sin2 ϕ широты.
Указанный технический результат достигается также тем, что в устройстве для определения величины и направления смещения центра масс аппарата блок определения составляющих ускорения силы тяжести содержит последовательно соединенные первый преобразователь координат, первый вход которого соединен с первым входом блока определения составляющих ускорения силы тяжести, второй вход - с выходом первого синусного функционального преобразователя, третий вход - с выходом первого косинусного функционального преобразователя, второй преобразователь координат, второй вход которого соединен с выходом второго синусного функционального преобразователя, третий вход - с выходом второго косинусного функционального преобразователя, четвертый вход - с первым выходом первого преобразователя координат, пятый вход - со вторым выходом первого преобразователя координат, входы первых синусного и косинусного функциональных преобразователей соединены со вторым входом блока определения составляющих ускорения силы тяжести, третий вход которого соединен со входами вторых синусного и косинусного функциональных преобразователей, а выход - с шиной ускорения силы тяжести так, что первый выход второго преобразователя координат соединен с выходом ускорения силы тяжести по нормальной оси связанной системы координат, второй выход - с выходом ускорения силы тяжести по поперечной оси связанной системы координат, а третий выход - с выходом ускорения силы тяжести по продольной оси связанной системы координат. При этом определяются проекции вектора ускорения силы тяжести (7) на оси связанной системы координат OX1Y1Z1 аппарата. Блок определения составляющих ускорения силы тяжести реализует последовательность поворотов осей от подвижной земной системы координат, в которой вектор ускорения силы тяжести направлен по вертикали места, к связанной системе координат аппарата, в которой производится измерение ускорения. Он реализует следующее соотношение между проекциями вектора ускорения силы тяжести в подвижной земной системе координат OXg2Yg2Zg2 (фиг. 1) и связанной системе координат OX1Y1Z1 аппарата
где [O, -g, O]' - проекции вектора ускорения силы тяжести на оси подвижной земной системы координат,
[gx, gy, gz]' - проекции вектора ускорения силы тяжести на оси связанной системы координат.
Указанный технический результат достигается также тем, что в устройстве для определения величины и направления смещения центра масс аппарата блок определения составляющих ускорения силы тяжести имеет преобразователь координат, который содержит последовательно соединенные первый умножитель, первый вход которого соединен с первым входом преобразователя координат, второй вход - со вторым входом преобразователя координат, третий сумматор, второй вход которого соединен с выходом второго умножителя, а выход - с первым выходом преобразователя координат, последовательно соединенные третий умножитель, первый вход которого соединен с первым входом преобразователя координат, второй вход - с третьим входом преобразователя координат, второй блок вычитания, суммирующий вход которого соединен с выходом третьего умножителя, вычитающий вход - с выходом четвертого умножителя, а выход - со вторым выходом преобразователя координат, четвертый вход преобразователя координат соединен с его третьим выходом, пятый вход - с первыми входами второго и четвертого умножителей, вторые входы которых соединены соответственно с третьим и вторым входами преобразователя координат. Преобразователь координат реализует преобразование проекций вектора в зависимости от синуса и косинуса угла, поступивших на второй и третий его входы. Поворот осуществляется путем преобразования значений проекций вектора на оси исходной системы координат, поступающих на первый, четвертый и пятый входы преобразователя. Соотношение входных и выходных сигналов преобразователя координат имеет вид
где Uвх.1, Uвх.4, Uвх.5 - сигналы, поступающие соответственно на первый, четвертый и пятый входы преобразователя координат;
Uвых.1, Uвых.2, Uвых.3 - выходные сигналы преобразователя координат соответственно на его первом, втором и третьем выходах;
sin α , cos α - сигналы на втором и третьем входе преобразователя координат;
α - угол поворота систем координат.
Указанный технический результат достигается также тем, что в устройстве для определения величины и направления смещения центра масс аппарата блок текущих координат центра масс содержит последовательно соединенные блок определения проекций и интегратор координат центра масс так, что первый вход блока текущих координат центра масс соединен с шиной приращения абсолютного ускорения, второй вход - с шиной угловой скорости аппарата, а выход - с шиной смещения центра масс, причем первый вход блока определения проекций соединен с входом угловой скорости по поперечной оси связанной системы координат, второй вход - с входом угловой скорости по нормальной оси связанной системы координат, третий вход - с входом угловой скорости по продольной оси связанной системы координат, а первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый и двенадцатый выходы - с одноименными входами интегратора координат центра масс, тринадцатый вход которого соединен с входом приращения абсолютного ускорения по продольной оси связанной системы координат, четырнадцатый вход - с входом приращения абсолютного ускорения аппарата по нормальной оси связанной системы координат, пятнадцатый вход - с входом приращения абсолютного ускорения по поперечной оси связанной системы координат, а первый выход - с выходом смещения центра масс по продольной оси связанной системы координат, второй выход - с выходом смещения центра масс по нормальной оси связанной системы координат, третий выход - с выходом смещения центра масс по поперечной оси связанной системы координат. Первый и второй входы блока текущих координат центра масс соединены соответственно с шиной приращения абсолютного ускорения и шиной угловой скорости аппарата. Проекции соответствующих векторов приращения абсолютного ускорения и угловой скорости аппарата на связанные оси имеют вид:
Выход соединен с шиной смещения центра масс. Проекции вектора смещения центра масс на те же оси имеют вид:
ρ = (x,y,z)′. (13)
Блок определения проекций формирует скалярные коэффициенты левой части дифференциального уравнения (2), а интегратор координат центра масс осуществляет решение этого уравнения относительно искомого смещения. При этом уравнения (2) представляются в проекциях на оси связанной системы координат: (14)
(14)
где 
Коэффициенты a11, a12, . . . a33, а также удвоенные проекции угловых скоростей с первого по двенадцатый выход блока определения проекций поступают на одноименные входы интегратора координат центра масс. На тринадцатый, четырнадцатый и пятнадцатый входы поступают приращения абсолютного ускорения, входящие в правую часть дифференциального уравнения (2).
Указанный технический результат достигается также тем, что в устройстве для определения величины и направления смещения центра масс аппарата блок определения проекций содержит шесть сумматоров, три блока вычитания, три инвертора, три усилителя, шесть умножителей и три дифференциатора, причем вход первого дифференциатора, как и вход первого усилителя, первые входы пятого, шестого и оба входа седьмого умножителей соединены с первым входом блока определения проекций, вход второго дифференциатора, как и вход второго усилителя, первый вход восьмого умножителя, второй вход пятого умножителя и оба входа девятого умножителя соединены со вторым входом блока определения проекций, вход третьего дифференциатора, как и вход третьего усилителя, вторые входы шестого, восьмого и оба входа десятого умножителей соединены с третьим входом блока определения проекций, первый вход четвертого сумматора и вычитающий вход третьего блока вычитания соединены с выходом первого дифференциатора, а второй вход четвертого сумматора и суммирующий вход третьего блока вычитания соединены с выходом восьмого умножителя, первый вход пятого сумматора и вычитающий вход четвертого блока вычитания соединены с выходом второго дифференциатора, а второй вход пятого сумматора и суммирующий вход четвертого блока вычитания соединены с выходом шестого умножителя, первый вход шестого сумматора и вычитающий вход пятого блока вычитания соединены с выходом третьего дифференциатора, а второй вход шестого сумматора и суммирующий вход пятого блока вычитания соединены с выходом пятого умножителя, первые входы седьмого и восьмого сумматоров соединены с выходом седьмого умножителя, второй вход восьмого сумматора и первый вход девятого сумматора соединены с выходом девятого умножителя, вторые входы девятого и седьмого сумматоров соединены с выходом десятого умножителя, вход первого инвертора соединен с выходом восьмого сумматора, а выход - с первым выходом блока определения проекций, второй выход которого соединен с выходом третьего блока вычитания, а третий выход - с выходом пятого сумматора, выход четвертого сумматора соединен с четвертым выходом блока определения проекций, пятый выход которого соединен с выходом второго инвертора, соединенного с выходом седьмого сумматора, шестой выход блока определения проекций соединен с выходом пятого блока вычитания, седьмой выход - с выходом четвертого блока вычитания, восьмой выход - с выходом шестого сумматора, девятый выход - с выходом третьего инвертора, соединенного с выходом девятого сумматора, десятый выход - с выходом первого усилителя, одиннадцатый выход - с выходом третьего усилителя, а двенадцатый выход - с выходом второго усилителя. Блок определения проекций реализует функцию вычисления коэффициентов по выражениям (15), а также удвоенных проекций угловых скоростей, входящих в уравнения (14).
Указанный технический результат достигается также тем, что в устройстве для определения величины и направления смещения центра масс аппарата интегратор координат центра масс содержит последовательно соединенные десятый сумматор, первый интегратор, второй интегратор, четвертый инвертор, одиннадцатый умножитель, второй вход которого соединен с первым входом интегратора координат центра масс, а выход - с первым входом десятого сумматора, второй вход которого соединен с тринадцатым входом интегратора координат центра масс, третий вход - с выходом двенадцатого умножителя, первым входом соединенным со вторым входом интегратора координат центра масс, четвертый вход - с выходом тринадцатого умножителя, первым входом соединенным с третьим входом интегратора координат центра масс, пятый вход - с выходом четырнадцатого умножителя, первым входом соединенным с десятым входом интегратора координат центра масс, шестой вход - с выходом пятого инвертора, последовательно соединенные одиннадцатый сумматор, третий интегратор, четвертый интегратор, шестой инвертор, пятнадцатый умножитель, второй вход которого соединен с пятым входом интегратора координат центра масс, а выход - с первым входом одиннадцатого сумматора, второй вход которого соединен с четырнадцатым входом интегратора координат центра масс, третий вход - с выходом шестнадцатого умножителя, первым входом соединенным с шестым входом интегратора координат центра масс, четвертый вход - с выходом семнадцатого умножителя, первым входом соединенным с четвертым входом интегратора координат центра масс, пятый вход - с выходом восемнадцатого умножителя, первым входом соединенным с одиннадцатым входом интегратора координат центра масс, шестой вход - с выходом седьмого инвертора, последовательно соединенные двенадцатый сумматор, пятый интегратор, шестой интегратор, восьмой инвертор, девятнадцатый умножитель, второй вход которого соединен с девятым входом интегратора координат центра масс, а выход - с первым входом двенадцатого сумматора, второй вход которого соединен с пятнадцатым входом интегратора координат центра масс, третий вход - с выходом двадцатого умножителя, первым входом соединенным с восьмым входом интегратора координат центра масс, четвертый вход - с выходом двадцать первого умножителя, первым входом соединенным с седьмым входом интегратора координат центра масс, пятый вход - с выходом двадцать второго умножителя, первым входом соединенным с двенадцатым входом интегратора координат центра масс, шестой вход - с выходом девятого инвертора, двадцать третий умножитель, первый вход которого соединен с десятым входом интегратора координат центра масс, второй вход, как и второй вход двадцать второго умножителя - с выходом первого интегратора а выход - с входом седьмого инвертора, двадцать четвертый умножитель, первый вход которого соединен с одиннадцатым входом интегратора координат центра масс, второй вход, как и второй вход четырнадцатого умножителя - с выходом третьего интегратора, а выход - с входом девятого инвертора, двадцать пятый умножитель, первый вход которого соединен с двенадцатым входом интегратора координат центра масс, второй вход, как и второй вход восемнадцатого умножителя - с выходом пятого интегратора, а выход - с входом пятого инвертора, выход четвертого инвертора соединен со вторыми входами семнадцатого, двадцать первого умножителей и первым выходом интегратора координат центра масс, выход шестого инвертора соединен со вторыми входами двенадцатого, двадцатого умножителей и вторым выходом интегратора координат центра масс, выход восьмого инвертора соединен со вторыми входами тринадцатого, шестнадцатого умножителей и третьим выходом интегратора координат центра масс. Интегратор координат центра масс реализует фикцию интегрирования системы дифференциальных уравнений (14) относительно искомого смещения центра масс. При этом использована операторная форма решения уравнений, преобразованных к виду:
где p - символ дифференцирования по Лапласу [24; 25 с. 219, 234]. Значение 1/p - обратное дифференцированию, представляет собой операцию интегрирования параметров, стоящих справа от него. Значение 1/p2 - двукратное интегрирование.
Указанный технический результат достигается также тем, что в устройстве для определения величины и направления смещения центра масс аппарата частотный селектор содержит последовательно соединенные тринадцатый сумматор, выход которого соединен с первым входом четырнадцатого сумматора, пятнадцатый сумматор, выход которого соединен со вторым входом четырнадцатого сумматора и первым вычитающим входом шестнадцатого сумматора, четвертый усилитель, выход которого соединен с третьим, четвертым вычитающим входами четырнадцатого сумматора и вторым суммирующим входом шестнадцатого сумматора, пятый усилитель, шестой усилитель, выход которого соединен с пятым вычитающим входом четырнадцатого сумматора и третьим суммирующим входом шестнадцатого сумматора, выход которого соединен с входом седьмого усилителя, семнадцатый сумматор, первую схему задержки, восемнадцатый сумматор, второй вход которого соединен с выходом седьмого усилителя, вторую схему задержки, девятнадцатый сумматор, второй вход которого соединен с выходом четырнадцатого сумматора, третью схему задержки, выход которой соединен с входом восьмого усилителя, выходом подключенного к второму входу тринадцатого сумматора, четвертую схему задержки, выход которой соединен со вторым вычитающим входом семнадцатого сумматора, а также вторым и третьим вычитающими входами пятнадцатого сумматора. Частотный селектор реализует функцию выделения высокочастотных составляющих сигналов от короткопериодических угловых колебаний аппарата, имеющих место на выходе первого сумматора и датчика угловых скоростей.
Указанный технический результат достигается также тем, что в устройстве для определения величины и направления смещения центра масс аппарата, содержащем средство измерения ускорения силы тяжести, средство измерения ускорения силы тяжести выполнено в виде датчика ускорения силы тяжести и содержит последовательно соединенные акселерометр, первый сумматор, шестой блок вычитания, блок текущих координат центра масс, последовательно соединенные датчик ускорения силы тяжести и блок определения составляющих ускорения силы тяжести, выход которого соединен со вторым входом первого сумматора, и последовательно соединенные датчик геоцентрических координат, блок двойного дифференцирования, первый блок определения составляющих абсолютного ускорения центра масс, второй вход которого соединен с выходом датчика долготы, третий вход - с выходом датчика широты, четвертый вход - с выходом датчика курса, пятый вход, как и второй вход блока определения составляющих ускорения силы тяжести - с выходом датчика тангажа, шестой вход, как и третий вход блока определения составляющих ускорения силы тяжести - с выходом датчика крена, а выход - со вторым входом шестого блока вычитания, выход датчика угловых скоростей соединен со вторым входом блока текущих координат центра масс, выход которого образует выходную шину смещения центра масс. В отличие от редшествующего исполнения устройства для определения величины и направления смещения центра масс аппарата здесь для выделения приращения абсолютного линейного ускорения используется информация навигационной системы о линейных координатах центра масс. Она дважды дифференцируется, преобразуется в первом блоке определения составляющих абсолютного ускорения центра масс к осям связанной системы координат и по шине абсолютного ускорения центра масс поступает на второй вход шестого блока вычитания. На выходе последнего формируется сигнал, пропорциональный приращению абсолютного ускорения от углового движения аппарата.
Указанный технический результат достигается также тем, что в устройстве для определения величины и направления смещения центра масс аппарата первый блок определения составляющих абсолютного ускорения центра масс содержит последовательно соединенные третий, четвертый, пятый, шестой и седьмой преобразователи координат так, что первый вход первого блока определения составляющих абсолютного ускорения центра масс соединен с шиной абсолютного ускорения геоцентрических координат аппарата, второй вход - с входами третьих синусного и косинусного функциональных преобразователей, третий вход - с входами четвертых синусного и косинусного функциональных преобразователей, четвертый вход - с входами пятых синусного и косинусного функциональных преобразователей, пятый вход - с входами шестых синусного и косинусного функциональных преобразователей, шестой вход - с входами седьмых синусного и косинусного функциональных преобразователей, а выход - с шиной абсолютного ускорения центра масс аппарата, причем первый вход третьего преобразователя координат соединен с входом абсолютного ускорения геоцентрических координат аппарата по оси, перпендикулярной к плоскости нулевого меридиана и расположенной в плоскости экватора, второй вход - с выходом третьего синусного функционального преобразователя, третий вход - с выходом третьего косинусного функционального преобразователя, четвертый вход - с входом абсолютного ускорения геоцентрических координат аппарата по оси вращения Земли, пятый вход - с входом абсолютного ускорения геоцентрических координат аппарата по оси в плоскости земного экватора и нулевого меридиана, первый вход четвертого преобразователя координат соединен с третьим выходом третьего преобразователя координат, второй вход - с выходом четвертого синусного функционального преобразователя, третий вход - с выходом четвертого косинусного функционального преобразователя, четвертый вход - с первым выходом третьего преобразователя координат, пятый вход - со вторым выходом третьего преобразователя координат, первый вход пятого преобразователя координат соединен с третьим выходом четвертого преобразователя координат, второй вход - с выходом пятого синусного функционального преобразователя, третий вход - с выходом пятого косинусного функционального преобразователя, четвертый вход - с первым выходом четвертого преобразователя координат, первый вход шестого преобразователя координат соединен с третьим выходом пятого преобразователя координат, второй вход - с выходом шестого синусного функционального преобразователя, третий вход - с выходом шестого косинусного функционального преобразователя, четвертый вход - с первым выходом пятого преобразователя координат, пятый вход - со вторым выходом пятого преобразователя координат, первый вход седьмого преобразователя координат соединен с третьим выходом шестого преобразователя координат, второй вход - с выходом седьмого синусного функционального преобразователя, третий вход - с выходом седьмого косинусного функционального преобразователя, четвертый вход - с первым выходом шестого преобразователя координат, пятый вход - со вторым выходом шестого преобразователя координат, первый выход седьмого преобразователя координат соединен с выходом нормальной составляющей абсолютного ускорения центра масс аппарата, второй выход - с выходом поперечной составляющей абсолютного ускорения центра масс аппарата, третий выход - с выходом продольной составляющей абсолютного ускорения центра масс аппарата. При этом определяются проекции вектора абсолютного линейного ускорения центра масс аппарата на оси связанной системы координат аппарата. Первый блок определения составляющих абсолютного ускорения центра масс реализует последовательность поворотов осей от геоцентрической системы координат, в которой датчик геоцентрических координат измеряет местоположение аппарата, к связанной системе координат аппарата, в которой производится измерение ускорения. Он реализует следующее соотношение между проекциями вектора абсолютного ускорения центра масс аппарата в геоцентрической системе координат O0X0Y0Z0 (фиг. 1) и связанной системе координат O1X1Y1Z1 аппарата
 - проекции вектора абсолютного ускорения центра масс аппарата в геоцентрической системе координат;
- проекции вектора абсолютного ускорения центра масс аппарата в геоцентрической системе координат;
[WXO, WYO, WZO] ' - проекции вектора абсолютного ускорения центра масс аппарата в связанной системе координат аппарата.
Указанный технический результат достигается также тем, что в устройстве для определения величины и направления смещения центра масс аппарата, содержащем средство измерения ускорения силы тяжести, средство измерения ускорения силы тяжести выполнено в виде датчика ускорения силы тяжести и содержит последовательно соединенные акселерометр, первый сумматор, шестой блок вычитания, блок текущих координат центра масс, последовательно соединенные датчик ускорения силы тяжести и блок определения составляющих ускорения силы тяжести, выход которого соединен со вторым входом первого сумматора, и последовательно соединенные датчик скорости изменения геоцентрических координат, четвертый дифференциатор, первый блок определения составляющих абсолютного ускорения центра масс, второй вход которого соединен с выходом датчика долготы, третий вход - с выходом датчика широты, четвертый вход - с выходом датчика курса, пятый вход, как и второй вход блока определения составляющих ускорения силы тяжести - с выходом датчика тангажа, шестой вход, как и третий вход блока определения составляющих ускорения силы тяжести - с выходом датчика крена, а выход - со вторым входом шестого блока вычитания, выход датчика угловых скоростей соединен со вторым входом блока текущих координат центра масс, выход которого образует выходную шину смещения центра масс. В отличие от предшествующих вариантов устройства для определения величины и направления смещения центра масс аппарата здесь для выделения приращения абсолютного ускорения используется информация навигационной системы о скорости перемещения центра масс аппарата. Она дифференцируется, преобразуется в первом блоке определения составляющих абсолютного ускорения центра масс к осям связанной системы координат и по шине абсолютного ускорения центра масс поступает на второй вход шестого блока вычитания. На выходе последнего формируется сигнал, пропорциональный приращению абсолютного ускорения от углового движения аппарата.
Указанный технический результат достигается также тем, что в устройстве для определения величины и направления смещения центра масс аппарата, содержащем средство измерения ускорения силы тяжести, средство измерения ускорения силы тяжести выполнено в виде датчика ускорения силы тяжести и содержит последовательно соединенные акселерометр, первый сумматор, шестой блок вычитания, блок текущих координат центра масс, последовательно соединенные датчик ускорения силы тяжести и блок определения составляющих ускорения силы тяжести, выход которого соединен со вторым входом первого сумматора, и последовательно соединенные датчик земных координат, блок двойного дифференцирования, второй блок определения составляющих абсолютного ускорения центра масс, второй вход которого соединен с выходом датчика курса, третий вход, как и второй вход блока определения составляющих ускорения силы тяжести - с выходом датчика тангажа, четвертый вход, как и третий вход блока определения составляющих ускорения силы тяжести - с выходом датчика крена, а выход - со вторым входом шестого блока вычитания, выход датчика угловых скоростей соединен со вторым входом блока текущих координат центра масс, выход которого образует выходную шину смещения центра масс. В отличие от предшествующих вариантов устройства здесь для выделения приращения абсолютного ускорения используется информация навигационной системы о линейных координатах центра масс в земной системе координат. Она дважды дифференцируется, преобразуется во втором блоке определения составляющих абсолютного ускорения центра масс к осям связанной системы координат и по шине абсолютного ускорения центра масс поступает на второй вход шестого блока вычитания. На выходе последнего формируется сигнал, пропорциональный приращению абсолютного ускорения от углового движения аппарата.
Указанный технический результат достигается также тем, что в устройстве для определения величины и направления смещения центра масс аппарата второй блок определения составляющих абсолютного ускорения центра масс содержит последовательно соединенные восьмой, девятый и десятый преобразователи координат так, что первый вход блока определения составляющих абсолютного ускорения центра масс соединен с шиной абсолютного ускорения земных координат аппарата, второй вход - с входами восьмых синусного и косинусного функциональных преобразователей, третий вход - с входами девятых синусного и косинусного функциональных преобразователей, четвертый вход - с входами десятых синусного и косинусного функциональных преобразователей, а выход - с шиной абсолютного ускорения центра масс аппарата, причем первый вход восьмого преобразователя координат соединен с входом абсолютного ускорения по горизонтальной оси направления движения земной системы координат, второй вход - с выходом восьмого синусного функционального преобразователя, третий вход - с выходом восьмого косинусного функционального преобразователя, четвертый вход - с входом абсолютного ускорения по оси местной вертикали земной системы координат, пятый вход - с входом абсолютного ускорения по горизонтальной оси, перпендикулярной оси направления движения, земной системы координат, первый вход девятого преобразователя координат соединен с третьим выходом восьмого преобразователя координат, второй вход - с выходом девятого синусного функционального преобразователя, третий вход - с выходом девятого косинусного функционального преобразователя, четвертый вход - с первым выходом восьмого преобразователя координат, пятый вход - со вторым выходом восьмого преобразователя координат, первый вход десятого преобразователя координат соединен с третьим выходом девятого преобразователя координат, второй вход - с выходом десятого синусного функционального преобразователя, третий вход - с выходом десятого косинусного функционального преобразователя, четвертый вход - с первым выходом девятого преобразователя координат, пятый вход - со вторым выходом девятого преобразователя координат, первый выход десятого преобразователя координат соединен с выходом нормальной составляющей абсолютного ускорения центра масс аппарата, второй выход - с выходом поперечной составляющей абсолютного ускорения центра масс аппарата, третий выход - с выходом продольной составляющей абсолютного ускорения центра масс аппарата. При этом определяются проекции вектора абсолютного ускорения центра масс аппарата на оси связанной системы координат OX1Y1Z1 аппарата. Второй блок определения составляющих абсолютного ускорения центра масс реализует последовательность поворотов осей от земной системы координат, в которой датчик земных координат измеряет местоположение аппарата, к связанной системе координат аппарата, в которой производится измерение ускорения. Он реализует следующее соотношение между проекциями вектора абсолютного ускорения центра масс аппарата в земной системе координат (фиг. 1) и связанной системе координат OX1Y1Z1 аппарата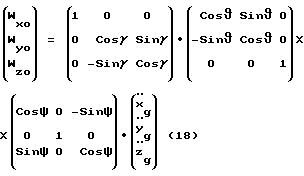
где  - проекции вектора абсолютного ускорения центра масс аппарата в земной системе координат;
- проекции вектора абсолютного ускорения центра масс аппарата в земной системе координат;
[WXO, WYO, WZO]' - проекции вектора абсолютного ускорения центра масс в связанной системе координат аппарата.
Указанный технический результат достигается также тем, что в устройстве для определения величины и направления смещения центра масс аппарата, содержащем средство измерения ускорения силы тяжести, средство измерения ускорения силы тяжести выполнено в виде датчика ускорения силы тяжести и содержит последовательно соединенные акселерометр, первый сумматор, шестой блок вычитания, блок текущих координат центра масс, последовательно соединенные датчик ускорения силы тяжести и блок определения составляющих ускорения силы тяжести, выход которого соединен со вторым входом первого сумматора, и последовательно соединенные датчик скорости изменения земных координат, четвертый дифференциатор, второй блок определения составляющих абсолютного ускорения центра масс, второй вход которого соединен с выходом датчика курса, третий вход, как и второй вход блока определения составляющих ускорения силы тяжести - с выходом датчика тангажа, четвертый вход, как и третий вход блока определения составляющих ускорения силы тяжести - с выходом датчика крена, а выход - со вторым входом шестого блока вычитания, выход датчика угловых скоростей соединен со вторым входом блока текущих координат центра масс, выход которого образует выходную шину смещения центра масс. В отличие от предшествующих вариантов устройства здесь для выделения приращения абсолютного ускорения используется информация навигационной системы о скорости перемещения центра масс аппарата в земной системе координат. Она дифференцируется, преобразуется во втором блоке определения составляющих абсолютного ускорения центра масс к осям связанной системы координат и по шине абсолютного ускорения центра масс поступает на второй вход шестого блока вычитания. Датчик скорости изменения земных координат отличается от датчика скорости изменения геоцентрических координат тем, что он подразумевает применение датчика, работающего на сравнительно малом удалении от аппарата, в зоне его прямой видимости. Это, например, лазерные измерители скорости [26, с. 7, 118].
Указанный технический результат достигается также тем, что в устройстве для определения величины и направления смещения центра масс аппарата, содержащем средство измерения ускорения силы тяжести, средство измерения ускорения силы тяжести выполнено в виде датчика ускорения силы тяжести и содержит последовательно соединенные акселерометр, первый сумматор, шестой блок вычитания, блок текущих координат центра масс, последовательно соединенные датчик ускорения силы тяжести и блок определения составляющих ускорения силы тяжести, второй вход которого соединен с выходом датчика тангажа, третий вход - с выходом датчика крена, а выход - со вторым входом первого сумматора, и последовательно соединенные датчик скорости аппарата, третий блок определения составляющих абсолютного ускорения центра масс, второй вход которого соединен с выходом датчика угловых скоростей, а выход - со вторым входом шестого блока вычитания, второй вход блока текущих координат центра масс соединен с выходом датчика угловых скоростей, а выход образует выходную шину смещения центра масс. В отличие от предшествующих вариантов устройства здесь для выделения приращения абсолютного ускорения используется информация датчика скорости аппарата в его связанных осях. Она дифференцируется и домножается на выходной сигнал датчика угловых скоростей в третьем блоке определения составляющих абсолютного ускорения центра масс и по шине абсолютного ускорения центра масс поступает на второй вход шестого блока вычитания.
Указанный технический результат достигается также тем, то в устройстве для определения величины и направления смещения центра масс аппарата третий блок определения составляющих абсолютного ускорения центра масс содержит три дифференциатора, три сумматора, шесть умножителей так, что первый вход третьего блока определения составляющих абсолютного ускорения центра масс соединен с шиной скорости аппарата, второй вход - с шиной абсолютной угловой скорости аппарата, а выход - с шиной абсолютного ускорения центра масс аппарата, первые входы пятого дифференциатора, двадцать шестого и двадцать седьмого умножителей соединены с входом скорости аппарата по продольной оси связанной системы координат, первые входы шестого дифференциатора, двадцать восьмого и двадцать девятого умножителей соединены с входом скорости аппарата по нормальной оси связанной системы координат, первые входы седьмого дифференциатора, тридцатого и тридцать первого умножителей соединены с входом скорости аппарата по поперечной оси связанной системы координат, вторые входы двадцать шестого и двадцать восьмого умножителей соединены с входом угловой скорости по поперечной оси связанной системы координат, вторые входы двадцать седьмого и тридцать первого умножителей соединены с входом угловой скорости по нормальной оси связанной системы координат, вторые входы двадцать девятого и тридцатого умножителей соединены с входом угловой скорости по продольной оси связанной системы координат, первый суммирующий вход двадцатого сумматора соединен с выходом пятого дифференциатора, второй вычитающий вход - с выходом двадцать восьмого умножителя, третий суммирующий вход - с выходом тридцать первого умножителя, а выход - с выходом продольной составляющей абсолютного ускорения центра масс аппарата, первый суммирующий вход двадцать первого сумматора соединен с выходом шестого дифференциатора, второй вычитающий вход - с выходом тридцатого умножителя, третий суммирующий вход - с выходом двадцать шестого умножителя, а выход - с выходом нормальной составляющей абсолютного ускорения центра масс аппарата, первый суммирующий вход двадцать второго сумматора соединен с выходом седьмого дифференциатора, второй вычитающий вход - с выходом двадцать седьмого умножителя, третий суммирующий вход - с выходом двадцать девятого умножителя, а выход - с выходом поперечной составляющей абсолютного ускорения центра масс аппарата. При этом определение проекций вектора абсолютного линейного ускорения центра масс аппарата на оси связанной системы координат производится по сигналам навигационного измерителя скорости аппарата в связанных осях и датчика угловых скоростей [12, с. 32 - 34]. В качестве датчика скорости аппарата здесь может применяться, например,
доплеровский измеритель абсолютной скорости. Третий блок определения составляющих абсолютного ускорения центра масс аппарата реализует следующее соотношение между проекциями вектора скорости аппарата, вектора угловой скорости аппарата в связанных осях и проекциями вектора абсолютного ускорения центра масс в тах же осях:
где [WXO, WYO, WZO] ' - проекции вектора абсолютного ускорения центра масс аппарата в связанной системе координат аппарата;
(ωx,ωy,ωz)′ -проекции вектора угловой скорости аппарата;
[VX, VY, VZ]' - проекции вектора скорости аппарата.
Проведенный заявителем анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностями признаков, тождественными всем признакам заявленных способа и устройства для определения величины и направления смещения центра масс аппарата, отсутствуют. Следовательно, каждое из заявленных изобретений соответствует условию патентоспособности "новизна".
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипов признаками каждого заявленного изобретения, показали, что они не следуют явным образом из уровня техники. Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками каждого из заявленных изобретений преобразований на достижение указанного технического результата. Следовательно, каждое из заявленных изобретений соответствует условию патентоспособности "изобретательский уровень".
В настоящей заявке на выдачу патента соблюдено требование единства изобретения, поскольку способ и устройство предназначены для определения величины и направления смещения центра масс аппарата. Заявленные изобретения решают одну и ту же задачу - определения величины и направления смещения центра масс аппарата в полете при любых параметрах его ориентации, изменении конфигурации аппарата, перемещении грузов, действии на него внешних и внутренних возмущений, сопоставления величины и направления смещения центра масс с допустимыми значениями для контроля и обеспечения безопасности полета и возможного управления движением аппарата с учетом точного значения центровки. Единым техническим результатом при осуществлении изобретений является создание комплексных систем управления и контроля с высокими технико-экономическими показателями.
На фиг. 1 изображено взаимное положение систем координат аппарата (Ап) и Земли (З1-З2), где приняты следующие обозначения:
O0X0Y0Z0 - геоцентрическая система координат, центр которой - точка O0 - расположен в центре Земли, ось O0Z0 направлена по оси вращения Земли в сторону Северного полюса, ось O0X0 лежит в плоскости экватора Э1 - Э2 и нулевого (Гринвичского) меридиана, ось O0Y0 перпендикулярна плоскости нулевого меридиана и расположена в плоскости экватора;
X0 - геоцентрическая координата аппарата по оси в плоскости земного экватора и нулевого меридиана;
Y0 - геоцентрическая координата аппарата по оси, перпендикулярной к плоскости нулевого меридиана и расположенной в плоскости экватора;
Z0 - геоцентрическая координата аппарата по оси вращения Земли;
O0Xg0Yg0Zg0 - геоцентрическая нормальная система координат, центр которой - точка O0 - расположен в центре Земли, ось O0Xg0 лежит в плоскости экватора Э1-Э2 под углом λ к оси O0X0, параллельной направлению движения, ось O0Yg0 перпендикулярна O0Xg0 и направлена по вертикали в точке O0g1 местоположения аппарата на Земле, ось O0Zg0, взаимно перпендикулярна осям O0Xg0, O0Yg0, лежит в плоскости меридиана точки Og1 местоположения аппарата и образует правую систему координат;
λ,ϕ - углы долготы и широты точки Og1, местоположения аппарата в геоцентрической системе координат O0X0Y0Z0, определяют угловое положение O0X0Y0Z0 и O0Xg0Yg0Zg0, Og1Xg1Yg1Zg1;
Og1Xg1Yg1Zg1 - земная система координат, центр которой - точка Og1 - расположен в точке местоположения аппарата на Земле, ось Og1Yg1 направлена по вертикали места, ось Og1Xg1 параллельна O0Xg0 и направлена в сторону движения, ось Og1Zg1 параллельна O0Zg0, оси Og1Xg1, Og1Zg1 лежат в плоскости горизонта и образуют правую систему координат;
OgXgYgZg - земная система координат локатора, центр которой - точка Og - расположен в точке местоположения локатора, а оси параллельны осям земной системы координат Og1Xg1Yg1Zg1;
Xg - координата аппарата по горизонтальной оси направления движения земной системы координат;
Yg - координаты аппарата по оси местной вертикали земной системы координат;
Zg - координата аппарата по горизонтальной оси, перпендикулярной оси направления движения;
Xg, Yg, Zg - земные координаты аппарата;
OXg2Yg2Zg2 - подвижная земная система координат, оси которой имеют то же направление, что и Xg1, Yg1, Zg1, но начало координат - точка O размещена на аппарате в его центре масс; ось OXg2 - горизонтальная ось направления движения; ось OYg2 - местная вертикаль; OZg2 - перпендикулярна направлению движения;
OфXфYфZф - система координат фюзеляжа, Oф - реперная точка; OфXф - строительная горизонталь фюзеляжа в его плоскости симметрии; ось OфYф перпендикулярна OфXф в плоскости симметрии аппарата, ось OфZф достраивает систему координат до правой и направлен в сторону правого крыла;
OX1Y1Z1 - связанная система координат, центр которой - точка O - расположен в центре масс аппарата, продольная ось OX1 параллельна строительной оси OфXф, нормальная ось OY1 параллельна строительной оси OфYф, поперечная ось OZ1 перпендикулярна плоскости симметрии аппарата и направлена в сторону правого крыла;
x - смещение центра масс по продольной оси связанной системы координат;
y - смещение центра масс по нормальной оси связанной системы координат;
z - смещение центра масс по поперечной оси связанной системы координат;
ψ,ϑ,γ - углы курса, тангажа, крена определяют взаимное угловое положение систем координат OX1Y1Z1 и OXg2Yg2Zg2;
ω - величина угловой скорости аппарата;
ωx - угловая скорость по продольной оси связанной системы координат;
ωy - угловая скорость по нормальной оси связанной системы координат;
ωz - угловая скорость по поперечной оси связанной системы координат;
WA - величина абсолютного ускорения аппарата в точке A, где установлен акселерометр;
WO - величина абсолютного ускорения аппарата в точке O - центре масс аппарата;
ρ - величина смещения центра масс аппарата относительно точки A - места установки акселерометра на аппарате;
ρA - величина удаления точки A установки акселерометра от реперной точки Oф;
На фиг. 2 приведена структурная схема устройства для определения величины и направления смещения центра масс аппарата по п. 4 формулы, где приняты следующие обозначения:
1 - акселерометр;
2-1 - первый сумматор;
3-1, 3-2 - первый и второй частотные селекторы;
4 - блок текущих координат центра масс;
5 - датчик ускорения силы тяжести;
6 - блок определения составляющих ускорения силы тяжести;
7 - датчик тангажа;
8 - датчик крена;
9 - датчик угловых скоростей;
10 - шина смещения центра масс.
На фиг. 3 приведена структурная схема устройства для определения величины и направления смещения центра масс аппарата по п. 5 формулы, где приняты следующие обозначения:
1 - акселерометр;
2-1 - первый сумматор;
3-1, 3-2 - первый и второй частотные селекторы;
4 - блок текущих координат центра масс;
5 - датчик ускорения силы тяжести;
6 - блок определения составляющих ускорения силы тяжести.
7 - датчик тангажа;
8 - датчик крена;
9 - датчик угловых скоростей;
10 - шина смещения центра масс;
11 - задатчик конструктивных координат акселерометра на аппарате;
12-1 - первый блок вычитания;
13 - шина отклонения смещения центра масс.
На фиг. 4 приведена структурная схема датчика 5 ускорения силы тяжести по п. 6 формулы, где приняты следующие обозначения:
14 - датчик широты;
15-1 - первый функциональный преобразователь;
2-2 - второй сумматор;
16 - датчик высоты.
17 - задачик эталонного значения ускорения силы тяжести.
На фиг. 5 приведена структурная схема блока 6 определения составляющих ускорения силы тяжести по п. 7 формулы, где приняты следующие обозначения:
18-1, 18-2 - первый и второй преобразователи координат;
19-1, 19-2 - первый и второй синусные функциональные преобразователи;
20-1, 20-2 - первый и второй косинусные функциональные преобразователи;
21 - шина ускорения силы тяжести.
На фиг. 6 приведена структурная схема преобразователей 18-1 - 18- 10 координат по п. 8 формулы, где приняты следующие обозначения:
2-3 - третий сумматор;
12-2 - второй блок вычитания;
22-1, 22-2, 22-3, 22-4 - первый, второй, третий, четвертый умножители;
На фиг. 7 приведена структурная схема блока 4 текущих координат центра масс по п. 9 формулы, где приняты следующие обозначения:
23 - блок определения проекций;
24 - интегратор координат центра масс;
25 - шина приращения абсолютного ускорения;
26 - шина угловой скорости.
На фиг. 8 приведена структурная схема блока 23 определения проекций по п. 10 формулы, где приняты следующие обозначения:
2-4, 2-5, 2-6, 2-7, 2-8, 2-9 - четвертый, пятый, шестой, седьмой, восьмой, девятый сумматоры;
12-3, 12-4, 12-5 - третий, четвертый, пятый блоки вычитания;
22-5, 22-6, 22-7, 22-8, 22-9, 22-10 - пятый, шестой, седьмой, восьмой, девятый, десятый умножители;
27-1, 27- 2, 27-2 - первый, второй, третий инверторы;
28-1, 28-2, 28-3 - первый, второй, третий усилители;
29-1, 29-2, 29-3 - первый, второй, третий дифференциаторы.
На фиг. 9 приведена структурная схема интегратора 24 координат центра масс по п. 11 формулы, где приняты следующие обозначения:
2-10, 2-11, 2-12 - десятый, одиннадцатый, двенадцатый сумматоры;
22-11, 22-12, 22-13, 22-14, 22-15, 22-16, 22-17, 22-18, 22-19, 22-20, 22-21, 22-22, 22-23, 22-24, 22-25 - одиннадцатый, двенадцатый, тринадцатый, четырнадцатый, пятнадцатый, шестнадцатый, семнадцатый, восемнадцатый, девятнадцатый, двадцатый, двадцать первый, двадцать второй, двадцать третий, двадцать четвертый, двадцать пятый умножители;
27-4, 27-5, 27-6, 27-7, 27-8, 27-9 - четвертый, пятый, шестой, седьмой, восьмой, девятый инверторы;
30-1, 30-2, 30- 3, 30-4, 30-5, 30-6 - первый, второй, третий, четвертый, пятый, шестой интеграторы.
На фиг. 10 приведена структурная схема частотного селектора 3-1 - 3-2 по п. 12 формулы, где приняты следующие обозначения:
2-13, 2-14, 2-15, 2-16, 2-17, 2-18, 2-19 - тринадцатый, четырнадцатый, пятнадцатый, шестнадцатый, семнадцатый, восемнадцатый, девятнадцатый сумматоры;
28-4, 28-5, 28-6, 28-7, 28-8 - четвертый, пятый, шестой, седьмой, восьмой усилители;
31-1, 31-2, 31-3, 31-4 - первая, вторая, третья, четвертая схемы задержки.
На фиг. 11 приведена структурная схема устройства для определения величины и направления смещения центра масс аппарата по п. 13 формулы, где приняты следующие обозначения:
1 - акселерометр;
2-1 - первый сумматор;
4 - блок текущих координат центра масс;
5 - датчик ускорения силы тяжести;
6 - блок определения составляющих ускорения силы тяжести;
7 - датчик тангажа;
8 - датчик крена;
9 - датчик угловых скоростей;
10 - шина смещения центра масс;
12-6 - шестой блок вычитания;
14 - датчик широты;
32 - датчик геоцентрических координат;
33 - блок двойного дифференцирования;
34 - первый блок определения составляющих абсолютного ускорения центра масс;
35 - датчик долготы;
36 - датчик курса.
На фиг. 12 приведена структурная схема первого блока 34 определения составляющих абсолютного ускорения центра масс по п. 14 формулы, где приняты следующие обозначения:
18-3, 18-4, 18-5, 18-6, 18-7- третий, четвертый, пятый, шестой, седьмой преобразователи координат;
19-3, 19-4, 19-5, 19-6, 19-7 - третий, четвертый, пятый, шестой, седьмой синусные функциональные преобразователи;
20-3, 20-4, 20-5, 20-6, 20-7 - третий, четвертый, пятый, шестой, седьмой косинусные функциональные преобразователи;
37 - шина абсолютного ускорения геоцентрических координат аппарата;
38 - шина абсолютного ускорения центра масс аппарата.
На фиг. 13 приведена структурная схема устройства для определения величины и направления смещения центра масс аппарата по п. 15 формулы, где приняты следующие обозначения:
1 - акселерометр;
2-1 - первый сумматор;
4 - блок текущих координат центра масс;
5 - датчик ускорения силы тяжести;
6 - блок определения составляющих ускорения силы тяжести;
7 - датчик тангажа;
8 - датчик крена;
9 - датчик угловых скоростей;
10 - шина смещения центра масс;
12-6 - шестой блок вычитания;
14 - датчик широты;
29-4 - четвертый дифференциатор;
34 - первый блок определения составляющих абсолютного ускорения центра масс;
35 - датчик долготы;
36 - датчик курса;
39 - датчик скорости изменения геоцентрических координат.
На фиг. 14 приведена структурная схема устройства для определения величины и направления смещения центра масс аппарата по по п. 16 формулы, где приняты следующие обозначения:
1 - акселерометр;
2-1 - первый сумматор;
4 - блок текущих координат центра масс;
5 - датчик ускорения силы тяжести;
6 - блок определения составляющих ускорения силы тяжести;
7 - датчик тангажа;
8 - датчик крена;
9 - датчик угловых скоростей;
10 - шина смещения центра масс;
12-6 - шестой блок вычитания;
33 - блок двойного дифференцирования;
36 - датчик курса;
40 - датчик земных координат;
41 - второй блок определения составляющих абсолютного ускорения центра масс.
На фиг. 15 приведена структурная схема второго блока 41 определения составляющих абсолютного ускорения центра масс по п. 17 формулы, где приняты следующие обозначения:
18-8, 18-9, 18-10 - восьмой, девятый, десятый преобразователи координат;
19-8, 19-9, 19-10 - восьмой, девятый, десятый синусные функциональные преобразователи;
20-8, 20-9, 20-10 - восьмой, девятый, десятый косинусные функциональные преобразователи;
38 - шина абсолютного ускорения центра масс аппарата;
42 - шина абсолютного ускорения земных координат аппарата.
На фиг. 16 приведена структурная схема устройства для определения величины и направления смещения центра масс аппарата по п. 18 формулы, где приняты следующие обозначения:
1 - акселерометр;
2-1 - первый сумматор;
4 - блок текущих координат центра масс;
5 - датчик ускорения силы тяжести;
6 - блок определения составляющих ускорения силы тяжести;
7 - датчик тангажа;
8 - датчик крена;
9 - датчик угловых скоростей;
10 - шина смещения центра масс;
12-6 - шестой блок вычитания;
29-4 - четвертый дифференциатор;
36 - датчик курса;
41 - второй блок определения составляющих абсолютного ускорения центра масс;
43 - датчик скорости изменения земных координат.
На фиг. 17 приведена структурная схема устройства для определения величины и направления смещения центра масс аппарата по п. 19 формулы, где приняты следующие обозначения:
1 - акселерометр;
2-1 - первый сумматор;
4 - блок текущих координат центра масс;
5 - датчик ускорения силы тяжести;
6 - блок определения составляющих ускорения силы тяжести;
7 - датчик тангажа;
8 - датчик крена;
9 - датчик угловых скоростей;
10 - шина смещения центра масс;
12-6 - шестой блок вычитания;
44 - датчик скорости аппарата;
45 - третий блок определения составляющих абсолютного ускорения центра масс.
На фиг. 18 приведена структурная схема третьего блока 45 определения составляющих абсолютного ускорения центра масс по п. 20 формулы, где приняты следующие обозначения:
2-20, 2-21, 2-22 - двадцатый, двадцать первый, двадцать второй сумматоры;
22-26, 22-27, 22-28, 22- 29, 22-30, 22-31 - двадцать шестой, двадцать седьмой, двадцать восьмой, двадцать девятый, тридцатый, тридцать первый умножители;
29-5, 29-6, 29-7 - пятый, шестой, седьмой дифференциаторы;
38 - шина абсолютного ускорения центра масс аппарата;
46 - шина скорости аппарата;
47 - шина абсолютной угловой скорости аппарата.
Способ осуществляется следующим образом. По фиг. 1 можно определить абсолютное линейное ускорение точки A, где установлен акселерометр [1,с.97 ]:
где WA - величина абсолютного линейного ускорения точки A;
WO - величина абсолютного линейного ускорения точки O, являющейся центром масс аппарата;
ω - величина абсолютной угловой скорости аппарата;
d ω /dt - величина абсолютного углового ускорения аппарата;
ρ - величина смещении центра масс по отношению к точке A;
t - время.
Преобразовав выражение (20) к виду дифференциального уравнения относительно неизвестного  , получаем:
, получаем:
Смешение  центра масс определяется посредством решения этого уравнения. Для этого предварительно определяется абсолютное угловое ускорение
центра масс определяется посредством решения этого уравнения. Для этого предварительно определяется абсолютное угловое ускорение  . Оно получается дифференцированием выходного сигнала датчика угловых скоростей. Абсолютное линейное ускорение получается суммированием кажущегося ускорения
. Оно получается дифференцированием выходного сигнала датчика угловых скоростей. Абсолютное линейное ускорение получается суммированием кажущегося ускорения  , которое измеряет акселерометр, и ускорения
, которое измеряет акселерометр, и ускорения  силы тяжести в точке местоположения аппарата:
силы тяжести в точке местоположения аппарата:
Все измерения кажущегося ускорения и абсолютных угловых скоростей проводятся в связанной системе координат OX1Y1Z1 аппарата. Проекции ускорения  силы тяжести на эти оси имеют вид:
силы тяжести на эти оси имеют вид:
а величина ускорения силы тяжести определяется по формуле
g = 9,78049(1+5,288•10-3 sin2 ϕ)- 3,086•10-6•H, (24)
где ϕ - широта местоположения аппарата;
H - высота местоположения аппарата относительно поверхности Земли.
По фиг. 1 можно определить соотношение между проекциями вектора ускорения силы тяжести в подвижной земной системе координат ОXg2Yg2 Zg2 и связанной системе координат OX1Y1Z1 аппарата
где [O, -g, O]' - проекции вектора ускорения силы тяжести на оси подвижной земной системы координат OXg2Yg2Zg2;
[gx, gy, gz]' - проекции вектора ускорения силы тяжести на оси связанной системы координат OX1Y1Z1.
Измерение величины и направления ускорения  силы силы тяжести возможно гравиметром [14, с. 75]. Однако предпочтительно аналитическое определение проекций gx, gy, gz с помощью датчика 5 ускорения силы тяжести (фиг. 4) и блока 6 определения составляющих ускорения силы тяжести (фиг. 5). Последний содержит одинаковые преобразователи 18-1, 18-2 координат, аналогичные преобразователям 18-3, ... 18-10 координат, применяемым в других блоках. Преобразователи 18-1, ... 18-10 осуществляют преобразование проекций вектора из одной исходной системы координат в другую подвижную систему координат, две оси которой повернуты на угол α по отношению к осям исходной системы координат. При этом проекции вектора в исходной системе координат поступают на первый, четвертый и пятый входы преобразователя 18-1, ... 18-10 координат (фиг. 6), а угол α взаимного поворота, представленный через функции sin α и cos α, поступает соответственно на второй и третий входы. На первом, втором и третьем выходах преобразователей 18-1, ... 18-10 координат получаются проекции вектора на оси подвижной системы координат согласно следующего соотношения:
силы силы тяжести возможно гравиметром [14, с. 75]. Однако предпочтительно аналитическое определение проекций gx, gy, gz с помощью датчика 5 ускорения силы тяжести (фиг. 4) и блока 6 определения составляющих ускорения силы тяжести (фиг. 5). Последний содержит одинаковые преобразователи 18-1, 18-2 координат, аналогичные преобразователям 18-3, ... 18-10 координат, применяемым в других блоках. Преобразователи 18-1, ... 18-10 осуществляют преобразование проекций вектора из одной исходной системы координат в другую подвижную систему координат, две оси которой повернуты на угол α по отношению к осям исходной системы координат. При этом проекции вектора в исходной системе координат поступают на первый, четвертый и пятый входы преобразователя 18-1, ... 18-10 координат (фиг. 6), а угол α взаимного поворота, представленный через функции sin α и cos α, поступает соответственно на второй и третий входы. На первом, втором и третьем выходах преобразователей 18-1, ... 18-10 координат получаются проекции вектора на оси подвижной системы координат согласно следующего соотношения:
где Uвх.1, Uвх.4, Uвх.5 - сигналы, поступающие соответственно на первый, второй и пятый входы преобразователя (18-1, ... 18-10) координат;
Uвых.1, Uвых.2, Uвых.3 - выходные сигналы преобразователя координат;
α - угол поворота подвижной системы координат по отношению к исходной системе координат, отсчитываемый против часовой стрелки;
sin α, cos α - сигналы на втором и третьем входах преобразователя координат.
Приращение абсолютного линейного ускорения аппарата в точке А, где установлен акселерометр, по отношению к абсолютному линейному ускорению в центре масс - точке O -определяется по формуле:
или в проекциях на оси связанной системы координат:
ΔWx= WxA-Wx0;
ΔWy= WyA-Wy0;
ΔWz= WzA-Wz0.
Оно получается из-за углового движения аппарата относительно центра масс. Причиной непрерывного углового движения аппарата являются внутренние и внешние воздействия от перемещения грузов, пассажиров, топлива, турбулентности воздушной среды. Угловое движение аппарата состоит из составляющих короткопериодического и длиннопериодического движений [5, с. 172; 12, с. 27; 16, с. 106] . Проведя узкополосную фильтрацию сигналов сравнительно интенсивного короткопериодического углового движения, можно выделить приращение  абсолютного ускорения. При этом выходные сигналы первого сумматора 2-1, пропорциональные абсолютному линейному ускорению, и датчика 9 угловых скоростей пропускаются соответственно через первый и второй частотные селекторы 3-1, 3-2. Выходной сигнал первого сумматора 2-1 после фильтрации в первом частотном селекторе 3-1 сохраняет информацию только о составляющей ускорения от короткопериодического углового движения относительно центра масс. Выходной сигнал датчика 9 угловых скоростей после фильтрации во втором частотном селекторе 3-2, сохраняет информацию только о составляющей угловой скорости короткопериодического углового движения аппарата относительно центра масс. После фильтрации параметров, соответствующих короткопериодическому угловому движению аппарата, их значения используются для решения дифференциального уравнения (21) в блоке 4 текущих координат центра масс. Интегрирование уравнения (21) приводит к нахождению смещения
абсолютного ускорения. При этом выходные сигналы первого сумматора 2-1, пропорциональные абсолютному линейному ускорению, и датчика 9 угловых скоростей пропускаются соответственно через первый и второй частотные селекторы 3-1, 3-2. Выходной сигнал первого сумматора 2-1 после фильтрации в первом частотном селекторе 3-1 сохраняет информацию только о составляющей ускорения от короткопериодического углового движения относительно центра масс. Выходной сигнал датчика 9 угловых скоростей после фильтрации во втором частотном селекторе 3-2, сохраняет информацию только о составляющей угловой скорости короткопериодического углового движения аппарата относительно центра масс. После фильтрации параметров, соответствующих короткопериодическому угловому движению аппарата, их значения используются для решения дифференциального уравнения (21) в блоке 4 текущих координат центра масс. Интегрирование уравнения (21) приводит к нахождению смещения  центра масс, проекции X, Y, Z которого получаются на выходе блока 4 текущих координат центра масс. Зная допустимые значения смещения, а также конструктивные координаты
центра масс, проекции X, Y, Z которого получаются на выходе блока 4 текущих координат центра масс. Зная допустимые значения смещения, а также конструктивные координаты  положения акселерометра на аппарате, можно определить и отклонение
положения акселерометра на аппарате, можно определить и отклонение  смещения
смещения  центра масс аппарата от заданного значения по условию безопасного устойчивого движения. При этом заданное смещение
центра масс аппарата от заданного значения по условию безопасного устойчивого движения. При этом заданное смещение  центра масс с задатчика 11 конструктивных координат акселерометра поступает на вход первого блока 12-1 вычитания, на второй вход которого поступает смещение
центра масс с задатчика 11 конструктивных координат акселерометра поступает на вход первого блока 12-1 вычитания, на второй вход которого поступает смещение  центра масс (фиг. 3). Выходной сигнал блока 12-1 вычитания пропорционален отклонению смещения центра масс от заданного значения
центра масс (фиг. 3). Выходной сигнал блока 12-1 вычитания пропорционален отклонению смещения центра масс от заданного значения  и может быть проградуирован в процентах средней аэродинамической хорды (САХ) крыла.
и может быть проградуирован в процентах средней аэродинамической хорды (САХ) крыла.
Приращение  абсолютного ускорения аппарата можно определить и с помощью измерений координат местоположения или скоростей аппарата его бортовой глобальной навигационной системой [20, с. 8]. В частности, с помощью спутниковой навигационной системы, как датчика 32 геоцентрических координат X0, Y0, Z0, после двукратного дифференцирования в блоке 33 двойного дифференцирования
абсолютного ускорения аппарата можно определить и с помощью измерений координат местоположения или скоростей аппарата его бортовой глобальной навигационной системой [20, с. 8]. В частности, с помощью спутниковой навигационной системы, как датчика 32 геоцентрических координат X0, Y0, Z0, после двукратного дифференцирования в блоке 33 двойного дифференцирования  и приведения к проекциям в осях связанной системы координат в первом блоке 34 определения составляющих ускорения центра масс, можно вычислить величину и направление абсолютного ускорения
и приведения к проекциям в осях связанной системы координат в первом блоке 34 определения составляющих ускорения центра масс, можно вычислить величину и направление абсолютного ускорения  центра масс аппарата (фиг. 11). Приращение абсолютного ускорения из-за углового движения аппарата получается как разность абсолютного ускорения
центра масс аппарата (фиг. 11). Приращение абсолютного ускорения из-за углового движения аппарата получается как разность абсолютного ускорения  ) аппарата и абсолютного ускорения
) аппарата и абсолютного ускорения  центра масс на выходе блока 12-6 вычитания. В отличие от вышеизложенного варианта устройства здесь и в последующих вариантах для определения приращения абсолютного ускорения аппарата непосредственно вычисляется абсолютное ускорение центра масс. При этом используется основное назначение бортовой навигационной системы - выдавать информацию о положении и/или скорости центра масс аппарата [19, с. 6; 30, с. 5]. В частности, если спутниковая навигационная система выдает информацию о скорости изменения геоцентрических координат
центра масс на выходе блока 12-6 вычитания. В отличие от вышеизложенного варианта устройства здесь и в последующих вариантах для определения приращения абсолютного ускорения аппарата непосредственно вычисляется абсолютное ускорение центра масс. При этом используется основное назначение бортовой навигационной системы - выдавать информацию о положении и/или скорости центра масс аппарата [19, с. 6; 30, с. 5]. В частности, если спутниковая навигационная система выдает информацию о скорости изменения геоцентрических координат  аппарата (фиг. 13), то для определения абсолютного ускорения центра
аппарата (фиг. 13), то для определения абсолютного ускорения центра  масс достаточно однократного дифференцирования выходного сигнала датчика 39 скорости изменения геоцентрических координат в четвертом дифференциаторе 29-4 с последующим прохождением сигнала абсолютного ускорения
масс достаточно однократного дифференцирования выходного сигнала датчика 39 скорости изменения геоцентрических координат в четвертом дифференциаторе 29-4 с последующим прохождением сигнала абсолютного ускорения  через тот же первый блок 34 определения составляющих абсолютного ускорения центра масс. Приращение
через тот же первый блок 34 определения составляющих абсолютного ускорения центра масс. Приращение  абсолютного ускорения с выхода блока 12-6 вычитания поступает на вход блока 4 текущих координат центра масс. На второй вход поступает информация об абсолютной угловой скорости аппарата с датчика 9 угловых скоростей. Последующее интегрирование уравнений (21) приводит к нахождению смещения
абсолютного ускорения с выхода блока 12-6 вычитания поступает на вход блока 4 текущих координат центра масс. На второй вход поступает информация об абсолютной угловой скорости аппарата с датчика 9 угловых скоростей. Последующее интегрирование уравнений (21) приводит к нахождению смещения  центра масс. По фиг. 1 можно определить соотношение между проекциями вектора абсолютного ускорения
центра масс. По фиг. 1 можно определить соотношение между проекциями вектора абсолютного ускорения  (или скорости
(или скорости  ) центра масс аппарата в геоцентрической системе координат O0X0Y0Z0 и связанной системе координат OX1Y1Z1:
) центра масс аппарата в геоцентрической системе координат O0X0Y0Z0 и связанной системе координат OX1Y1Z1: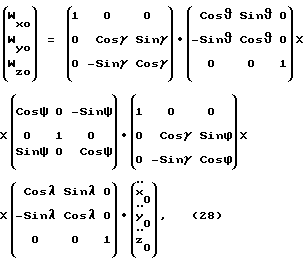
где  - проекции вектора абсолютного ускорения центра масс аппарата в геоцентрической системе координат;
- проекции вектора абсолютного ускорения центра масс аппарата в геоцентрической системе координат;
[WXO, WYO, WZO] ' - проекции вектора абсолютного ускорения центра масс аппарата в связанной системе координат.
Приращение  абсолютного ускорения аппарата можно определить и с помощью измерений координат местоположения или скоростей аппарата его бортовой системой ближней навигации, радиус действия которой ограничен зоной прямой видимости с аппарата точки Og земной системы координат локатора. В частности, это возможно с помощью лазерных локационных систем [17, с. 183; 26; 27; 28, с. 73] или радиотехнических систем ближней навигации [29, с. 96; 31, с. 94]. Координаты местоположения Xg, Yg, Zg аппарата в земной системе координат локатора (фиг. 1) измеряются датчиком 40 земных координат (фиг. 14). В этом устройстве абсолютное ускорение
абсолютного ускорения аппарата можно определить и с помощью измерений координат местоположения или скоростей аппарата его бортовой системой ближней навигации, радиус действия которой ограничен зоной прямой видимости с аппарата точки Og земной системы координат локатора. В частности, это возможно с помощью лазерных локационных систем [17, с. 183; 26; 27; 28, с. 73] или радиотехнических систем ближней навигации [29, с. 96; 31, с. 94]. Координаты местоположения Xg, Yg, Zg аппарата в земной системе координат локатора (фиг. 1) измеряются датчиком 40 земных координат (фиг. 14). В этом устройстве абсолютное ускорение  центра масс получается после дифференцирования координат Xg, Yg, Zg в блоке 33 двойного дифференцирования и последующего преобразования этой информации к осям связанной системы координат во втором блоке 41 определения составляющих абсолютного ускорения центра масс аппарата.
центра масс получается после дифференцирования координат Xg, Yg, Zg в блоке 33 двойного дифференцирования и последующего преобразования этой информации к осям связанной системы координат во втором блоке 41 определения составляющих абсолютного ускорения центра масс аппарата.
Приращение  абсолютного ускорения из-за углового движения аппарата получается также на выходе блока 12-6 вычитания в соответствии с формулой (27). Приращение
абсолютного ускорения из-за углового движения аппарата получается также на выходе блока 12-6 вычитания в соответствии с формулой (27). Приращение  абсолютного ускорения с выхода блока 12-6 вычитания поступает на вход блока 4 текущих координат центра масс. На второй вход поступает информация об абсолютной угловой скорости аппарата с датчика 9 угловых скоростей. Последующее интегрирование уравнений (21) приводит к нахождению смещения
абсолютного ускорения с выхода блока 12-6 вычитания поступает на вход блока 4 текущих координат центра масс. На второй вход поступает информация об абсолютной угловой скорости аппарата с датчика 9 угловых скоростей. Последующее интегрирование уравнений (21) приводит к нахождению смещения  центра масс. В том случае, если система ближней навигации выдает информацию о скорости изменения земных координат
центра масс. В том случае, если система ближней навигации выдает информацию о скорости изменения земных координат  , то для определения абсолютного ускорения
, то для определения абсолютного ускорения  достаточно однократного дифференцирования выходных сигналов датчика 43 скорости изменения земных координат
достаточно однократного дифференцирования выходных сигналов датчика 43 скорости изменения земных координат  c последующим прохождением этого сигнала через второй блок 41 определения составляющих абсолютного ускорения центра масс до поступления на вход блока 12-6 вычитания. После нахождения приращения ускорения
c последующим прохождением этого сигнала через второй блок 41 определения составляющих абсолютного ускорения центра масс до поступления на вход блока 12-6 вычитания. После нахождения приращения ускорения  процесс решения уравнения (21) аналогичен вышеизложенному. По фиг. 1 можно определить соотношение между проекциями вектора абсолютного ускорения
процесс решения уравнения (21) аналогичен вышеизложенному. По фиг. 1 можно определить соотношение между проекциями вектора абсолютного ускорения  (или скорости
(или скорости  ) центра масс аппарата в земной системе координат локатора и связанной системой координат:
) центра масс аппарата в земной системе координат локатора и связанной системой координат:
где  - проекции вектора абсолютного ускорения центра масс аппарата в земной системе координат локатора.
- проекции вектора абсолютного ускорения центра масс аппарата в земной системе координат локатора.
Приращение  абсолютного ускорения аппарата можно определять и с помощью измерения абсолютной скорости
абсолютного ускорения аппарата можно определять и с помощью измерения абсолютной скорости  аппарата в осях связанной системы координат OX1 Y1 Z1. В частности, это возможно делать с помощью доплеровских навигационных измерителей скорости аппарата относительно Земли [26, с. 135, 29, с. 218; 30]. Проекции абсолютной скорости Vx, Vy, Vz в связанных осях измеряются датчиком 44 скорости аппарата и далее поступают на первый вход третьего блока 45 определения составляющих абсолютного ускорения центра масс. Одновременно на второй вход этого же блока 45 определения составляющих поступает сигнал с датчика 9 угловых скоростей о векторе ωx,ωy,ωz абсолютной угловой скорости. Третий блок 45 определения составляющих абсолютного ускорения центра масс вычисляет проекции вектора
аппарата в осях связанной системы координат OX1 Y1 Z1. В частности, это возможно делать с помощью доплеровских навигационных измерителей скорости аппарата относительно Земли [26, с. 135, 29, с. 218; 30]. Проекции абсолютной скорости Vx, Vy, Vz в связанных осях измеряются датчиком 44 скорости аппарата и далее поступают на первый вход третьего блока 45 определения составляющих абсолютного ускорения центра масс. Одновременно на второй вход этого же блока 45 определения составляющих поступает сигнал с датчика 9 угловых скоростей о векторе ωx,ωy,ωz абсолютной угловой скорости. Третий блок 45 определения составляющих абсолютного ускорения центра масс вычисляет проекции вектора  абсолютного ускорения центра масс аппарата согласно следующему соотношению:
абсолютного ускорения центра масс аппарата согласно следующему соотношению:
где [WXO, WYO, WZO] ' - проекции вектора абсолютного ускорения центра масс аппарата в связанной системе координат OX1Y1Z1;
[Vx, Vy, Vz] ' - проекции вектора абсолютной скорости аппарата в связанной системе координат OX1Y1Z1;
[ωx,ωy,ωz]′ - проекции вектора угловой скорости аппарата в связанной системе координат OX1Y1 Z1;
d/dt - производная по времени.
Приращение  абсолютного ускорения из-за углового движения аппарата вокруг центра масс получается на выходе блока 12-6 вычитания. Далее по уравнению (21) в блоке 4 текущих координат центра масс определяется искомое смещение
абсолютного ускорения из-за углового движения аппарата вокруг центра масс получается на выходе блока 12-6 вычитания. Далее по уравнению (21) в блоке 4 текущих координат центра масс определяется искомое смещение  .
.
Устройство (фиг. 2) для определения величины и направления смещения центра масс аппарата содержит последовательно соединенные акселерометр 1, сумматор 2-1, частотный селектор 3-1, блок 4 текущих координат центра масс. Оно также содержит последовательно соединенные датчик 5 ускорения силы тяжести, блок 6 определения составляющих ускорения силы тяжести, второй вход которого соединен с выходом датчика 7 тангажа, третий вход - с выходом датчика 8 крена, а выход - со вторым входом сумматора 2-1. Последовательно соединены датчик 9 угловых скоростей и частотный селектор 3-2, выход которого соединен со вторым входом блока 4 текущих координат центра масс, выход которого образует выходную шину 10 смещения центра масс.
Устройство (фиг. 3) для определения величины и направления смещения центра масс аппарата содержит последовательно соединенные акселерометр 1, сумматор 2-1, частотный селектор 3-1, блок 4 текущих координат центра масс. Оно также содержит последовательно соединенные датчик 5 ускорения силы тяжести, блок 6 определения составляющих ускорения силы тяжести, второй вход которого соединен с выходом датчика 7 тангажа, третий вход - с выходом датчика 8 крена, а выход - со вторым входом сумматора 2-1. Последовательно соединены датчик 9 угловых скоростей и частотный селектор 3-2, выход которого соединен со вторым входом блока 4 текущих координат центра масс. Оно дополнительно содержит последовательно соединенные задатчик 11 конструктивных координат акселерометра 1 на аппарате и блок 12-1 вычитания, второй вход которого соединен с выходной шиной 10 смещения центра масс, а выход образует шину 13 отклонения смещения центра масс.
Датчик 5 ускорения силы тяжести (фиг. 4) содержит последовательно соединенные датчик 14 широты, первый функциональный преобразователь 15-1 и сумматор 12-2, второй суммирующий вход которого соединен с выходом датчика 16 высоты, третий вычитающий вход - с выходом задатчика 17 эталонного значения ускорения силы тяжести, а выход - с выходом датчика 5 ускорения силы тяжести.
Блок 6 определения составляющих ускорения силы тяжести (фиг. 5) содержит последовательно соединенные преобразователь 18-1 координат, первый вход которого соединен с первым входом блока 6 определения составляющих ускорения силы тяжести, второй вход - с выходом синусного функционального преобразователя 19-1, третий вход - с выходом косинусного функционального преобразователя 20-1, преобразователь 18-2 координат, второй вход которого соединен с выходом синусного функционального преобразователя 19-2, третий вход - с выходом косинусного функционального преобразователя 20-2, четвертый вход - с первым выходом преобразователя 18-1 координат, пятый вход - со вторым выходом преобразователя 18-2 координат, входы синусного и косинусного функциональных преобразователей 19-1, 20-1 соединены со вторым входом блока 6 определения составляющих ускорения силы тяжести, третий вход которого соединен со входами синусного и косинусного функциональных преобразователей 19-2, 20 - 2, а выход - с шиной 21 ускорения силы тяжести так, что первый выход преобразователя 18-2 координат соединен с выходом ускорения силы тяжести по нормальной оси связанной системы координат, второй выход - с выходом ускорения силы тяжести по поперечной оси связанной системы координат, а третий выход - с выходом ускорения силы тяжести по продольной оси связанной системы координат.
Преобразователь 18-1, ... 18-10 координат (фиг. 6) содержит последовательно соединенные умножитель 22-1, первый вход которого соединен с первым входом преобразователя 18-1, ... 18-10 координат, второй вход - со вторым входом преобразователя 18-1, ... 18-10 координат, сумматор 2-3, второй вход которого соединен с выходом умножителя 22-2, а выход - с первым выходом преобразователя 18- 1, ... 18-10 координат, последовательно соединенные умножитель 22-3, первый вход которого соединен с первым входом преобразователя 18- 1, ... 18-10 координат, второй вход - с третьим входом преобразователя 18-1, . . . 18-10 координат, блок 12-2 вычитания, суммирующий вход которого соединен с выходом умножителя 22-3, вычитающий вход - с выходом умножителя 22-4, а выход - со вторым выходом преобразователя образователя 1 8-1, ... 18-10 координат, четвертый вход преобразователя 18-1, ... 18-10 координат соединен с его третьим выходом, пятый вход - с первыми входами умножителей 22-2, 22-4, вторые входы которых соединены соответственно с третьим и вторым входами преобразователя 18-1, ... 18-10 координат.
Блок 4 текущих координат центра масс (фиг. 7) содержит последовательно соединенные блок 23 определения проекций и интегратор 24 координат центра масс так, что первый вход блока 4 текущих координат центра масс соединен с шиной 25 приращения абсолютного ускорения, второй вход - с шиной 26 угловой скорости аппарата, а выход - с шиной 10 смещения центра масс, причем первый вход блока 23 определения проекций соединен с входом угловой скорости по поперечной оси связанной системы координат, второй вход - с входом угловой скорости по нормальной оси связанной системы координат, третий вход - с входом угловой скорости по продольной оси связанной системы координат, а первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый и двенадцатый выходы - с одноименными входами интегратора 24 координат центра масс, тринадцатый вход которого соединен с входом приращения абсолютного ускорения по продольной оси связанной системы координат, четырнадцатый вход - с входом приращения абсолютного ускорения по нормальной оси связанной системы координат, пятнадцатый вход - с входом приращения абсолютного ускорения по поперечной оси связанной системы координат, а первый выход - с выходом смещения центра масс по продольной оси связанной системы координат, второй выход - с выходом смещения центра масс по нормальной оси связанной системы координат, третий выход - с выходом смещения центра масс по поперечной оси связанной системы координат.
Блок 23 определения проекций (фиг. 8) содержит дифференциатор 29-1, вход которого, как и вход усилителя 28-1, первые входы умножителей 22-5, 22-6 и оба входа умножителя 22-7 соединены с первым входом блока 23 определения проекций, вход дифференциатора 29-2, как и вход усилителя 28-2, первый вход умножителя 22-8, второй вход умножителя 22-5 и оба входа умножителя 22-9 соединены со вторым входом блока 23 определения проекций, вход дифференциатора 29-3, как и вход усилителя 28-3, вторые входы умножителей 22-6, 22-8 и оба входа умножителя 22-10 соединены с третьим входом блока 23 определения проекций, первый вход сумматора 2-4 и вычитающий вход блока 12-3 вычитания соединены с выходом дифференциатора 29-1, а второй вход сумматора 2-4 и суммирующий вход блока 12-3 вычитания соединены с выходом умножителя 22-8, первый вход сумматора 2-5 и вычитающий вход блока 12-4 вычитания соединены с выходом дифференциатора 29-2, а второй вход сумматора 2-5 и суммирующий вход блока 12-4 вычитания соединены с выходом умножителя 22-6, первый вход сумматора 2-6 и вычитающий вход блока 12-5 вычитания соединены с выходом дифференциатора 29-3, а второй вход сумматора 2-6 и суммирующий вход блока 12-5 вычитания соединены с выходом умножителя 22-5, первые входы сумматоров 2-7, 2-8 соединены с выходом умножителя 22-7, второй вход сумматора 2-8 и первый вход сумматора 2-9 соединены с выходом умножителя 22-9, вторые входы сумматоров 2-9, 2-7 соединены с выходом умножителя 22-10, вход инвертора 27-1 соединен с выходом сумматора 2-8, а выход - с первым выходом блока 23 определения проекций, второй выход которого соединен с выходом блока 12-3 вычитания, а третий выход - с выходом сумматора 2-5, выход сумматора 2-4 соединен с четвертым выходом блока 23 определения проекций, пятый выход которого соединен с выходом инвертора 27-2, соединенного с выходом сумматора 2-7, шестой выход блока 23 определения проекций соединен с выходом блока 12-4 вычитания, седьмой выход - с выходом блока 12-4 вычитания, восьмой выход - с выходом сумматора 2-6; девятый выход - с выходом инвертора 27-3, соединенного с выходом сумматора 2-9, десятый выход - с выходом усилителя 28-1, одиннадцатый выход - с выходом усилителя 28-3, двенадцатый выход - с выходом усилителя 28-2.
Интегратор 24 координат центра масс (фиг. 9) содержит последовательно соединенные сумматор 2-10, интегратор 30-1, интегратор 30-2, инвертор 27-4, умножитель 22-11, второй вход которого соединен с первым входом интегратора 24 координат центра масс, а выход - с первым входом сумматора 2-10, второй вход которого соединен с тринадцатым входом интегратора 24 координат центра масс, третий вход - с выходом умножителя 22-12, первым входом соединенным со вторым входом интегратора 24 координат центра масс, четвертый вход - с выходом умножителя 22-13, первым входом соединенным с третьим входом интегратора 24 координат центра масс, пятый вход - с выходом умножителя 22-14, первым входом соединенным с десятым входом интегратора 24 координат центра масс, шестой вход - с выходом инвертора 27-5, последовательно соединенные сумматор 2- 11, интегратор 30-3, интегратор 30-4, инвертор 27-6, умножитель 22-15, второй вход которого соединен с пятым входом интегратора 24 координат центра масс, а выход - с первым входом сумматора 2-11, второй вход которого соединен с четырнадцатым входом интегратора 24 координат центра масс, третий вход - с выходом умножителя 22-16, первым входом соединенным с шестым входом интегратора 24 координат центра масс, четвертый вход - с выходом умножителя 22-17, первым входом соединенным с четвертым входом интегратора 24 координат центра масс, пятый вход - с выходом умножителя 22-18, первым входом соединенным с одиннадцатым входом интегратора 24 координат центра масс, шестой вход - с выходом инвертора 27-7, последовательно соединенные сумматор 2-12, интегратор 30-5, интегратор 30-6, инвертор 27-8, умножитель 22-19, второй вход которого соединен с девятым входом интегратора 24 координат центра масс, а выход - с первым входом сумматора 2-12, второй вход которого соединен с пятнадцатым входом интегратора 24 координат центра масс, третий вход - с выходом умножителя 22-20, первым входом соединенный с восьмым входом интегратора 24 координат центра масс, четвертый вход - с выходом умножителя 22-21, первым входом соединенным с седьмым входом интегратора 24 координат центра масс, пятый вход - с выходом умножителя 22-22, первым входом соединенным с двенадцатым входом интегратора 24 координат центра масс, шестой вход - с выходом инвертора 27-9, умножитель 22-23, первый вход которого соединен с десятым входом интегратора 24 координат центра масс, второй вход, как и второй вход умножителя 22-22 - с выходом интегратора 30-1, а выход - с входом инвертора 27-7, умножитель 22-24, первый вход которого соединен с одиннадцатым входом интегратора 24 координат центра масс, второй вход, как и второй вход умножителя 22-14 - с выходом интегратора 30-3, а выход - с входом инвертора 27-9, умножитель 22-25, первый вход которого соединен с двенадцатым входом интегратора 24 координат центра масс, второй вход, как и второй вход умножителя 22-18 - с выходом интегратора 30-5, а выход - с входом инвертора 27-5, выход инвертора 27-4 соединен со вторыми входами умножителей 22-17, 22- 21 и первым выходом интегратора 24 координат центра масс, выход инвертора 27-6 соединен со вторыми входами умножителей 22-12, 22-20 и вторым выходом интегратора 24 координат центра масс, выход инвертора 27-8 соединен со вторыми входами умножителей 22-13, 22-16 и третьим выходом интегратора 24 координат центра масс.
Частотный селектор 3-1, 3-2 (фиг. 10) содержит последовательно соединенные сумматор 2-13, выход которого соединен с первым входом сумматора 2-14, сумматор 2-15, выход которого соединен со вторым входом сумматора 2-14 и первым вычитающим входом сумматора 2-16, усилитель 28-4, выход которого соединен с третьим, четвертым вычитающими входами сумматора 2-14 и вторым суммирующим входом сумматора 2-16, усилитель 28-5, усилитель 28-6, выход которого соединен с пятым вычитающим входом сумматора 2-14 и третьим суммирующим входом сумматора 2-16, выход которого соединен с входом усилителя 28-7, сумматор 2-17, схему 31-1 задержки, сумматор 2-18, второй вход которого соединен с выходом усилителя 28-7, схему 31-2 задержки; сумматор 2-19, второй вход которого соединен с выходом сумматора 2-14, схему 31-3 задержки, выход которой соединен с входом усилителя 28-8, выходом подключенного к второму входу сумматора 2-13, схему 31-4 задержки, выход которой соединен со вторым вычитающим входом сумматора 2-17, а также вторым и третьим вычитающими входами сумматора 2-15. Частотные селекторы 3-1, 3-2 содержат по три одинаковых схемы (фиг. 10) для каждой составляющей сигналов шины абсолютного ускорения аппарата и шины абсолютной угловой скорости аппарата.
Устройство для определения величины и направления смещения центра масс аппарата (фиг. 11) содержит последовательно соединенные акселерометр 1, сумматор 2-1, блок 12- 6 вычитания, блок 4 текущих координат центра масс, последовательно соединенные датчик 5 ускорения силы тяжести и блок 6 определения составляющих ускорения силы тяжести, выход которого соединен со вторым входом сумматора 2-1, и последовательно соединенные датчик 32 геоцентрических координат, блок 33 двойного дифференцирования, первый блок 34 определения составляющих абсолютного ускорения центра масс, второй вход которого соединен с выходом датчика 35 долготы, третий вход - с выходом датчика 14 широты, четвертый вход - с выходом датчика 36 курса, пятый вход, как и второй вход блока 6 определения составляющих ускорения силы тяжести - с выходом датчика 7 тангажа, шестой вход, как и третий вход блока 6 определения составляющих ускорения силы тяжести - с выходом датчика 8 крена, а выход - со вторым входом блока 12-6 вычитания, выход датчика 9 угловых скоростей соединен со вторым входом блока 4 текущих координат центра масс, выход которого образует шину 10 смещения центра масс.
Первый блок 34 определения составляющих абсолютного ускорения центра масс (фиг. 12) содержит последовательно соединенные преобразователи 18-3, 18-4, 18-5, 18- 6, 18-7 координат так, что первый вход первого блока 34 определения составляющих абсолютного ускорения центра масс соединен с шиной 37 абсолютного ускорения геоцентрических координат аппарата, второй вход - с входами синусного и косинусного функциональных преобразователей 19-3, 20-3, третий вход - с входами синусного и косинусного функциональных преобразователей 19-4, 20-4, четвертый вход - с входами синусного и косинусного функциональных преобразователей 19-5, 20-5, пятый вход - с входами синусного и косинусного функциональных преобразователей 19-6, 20- 6, шестой вход - с входами синусного и косинусного функциональных преобразователей 19-7, 20-7, а выход - с шиной 38 абсолютного ускорения центра масс аппараты, причем первый вход преобразователя 18-3 координат соединен с входом абсолютного ускорения геоцентрических координат аппарата по оси, перпендикулярной плоскости нулевого меридиана и расположенной в плоскости экватора, второй вход - с выходом синусного функционального преобразователя 19-3, третий вход - с выходом косинусного функционального преобразователя 20-3, четвертый вход - с входом абсолютного ускорения геоцентрических координат аппарата по оси вращения Земли, пятый вход - с входом абсолютного ускорения геоцентрических координат аппарата по оси в плоскости земного экватора и нулевого меридиана, первый вход преобразователя 18-4 координат соединен с третьим выходом преобразователя 18-3 координат, второй вход - с выходом синусного функционального преобразователя 19-4, третий вход - с выходом косинусного функционального преобразователя 20-4, четвертый вход - с первым выходом преобразователя 18-3 координат, пятый вход - со вторым выходом преобразователя 18-3 координат, первый вход преобразователя 18-5 координат соединен с третьим выходом преобразователя 18-4 координат, второй вход - с выходом синусного функционального преобразователя 19-5, третий вход - с выходом косинусного функционального преобразователя 20-5, четвертый вход - с первым выходом преобразователя 18-4 координат, пятый вход - со вторым выходом преобразователя 18-4 координат, первый вход преобразователя 18-6 координат соединен с третьим выходом преобразователя 18-5 координат, второй вход - с выходом синусного функционального преобразователя 19-6, третий вход - с выходом косинусного функционального преобразователя 20-6, четвертый вход - с первым выходом преобразователя 18-5 координат, пятый вход - со вторым выходом преобразователя 18-5 координат, первый вход преобразователя 18-7 координат соединен с третьим выходом преобразователя 18-6 координат, второй вход - с выходом синусного функционального преобразователя 19-7, третий вход - с выходом косинусного функционального преобразователя 20-7, четвертый вход - с первым выходом преобразователя 18-6 координат, пятый вход - со вторым выходом преобразователя 18-6 координат, первый выход преобразователя 18-7 координат соединен с выходом нормальной составляющей абсолютного ускорения центра масс аппарата, второй выход - с выходом поперечной составляющей абсолютного ускорения центра масс аппарата, третий выход - с выходом продольной составляющей абсолютного ускорения центра масс аппарата.
Устройство для определения величины и направления смещения центра масс аппарата (фиг. 13) содержит последовательно соединенные акселерометр 1, сумматор 2-1, блок 12-6 вычитания, блок 4 текущих координат центра масс, последовательно соединенные датчик 5 ускорения силы тяжести и блок 6 определения составляющих ускорения силы тяжести, выход которого соединен со вторым входом сумматора 2-1, и последовательно соединенные датчик 39 скорости изменения геоцентрических координат, дифференциатор 29-4, первый блок 34 определения составляющих абсолютного ускорения центра масс, второй вход которого соединен с выходом датчики 35 долготы, третий вход - с выходом датчика 14 широты, четвертый вход - с выходом датчика 36 курса, пятый вход, как и второй вход блока 6 определения составляющих ускорения силы тяжести - с выходом датчика 7 тангажа, шестой вход - как и третий вход блока 6 определения составляющих ускорения силы тяжести - с выходом датчика 8 крена, а выход - со вторым входом блока 12-6 вычитания, выход датчика 9 угловых скоростей соединен со вторым входом блока 4 текущих координат центра масс, выход которого образует выходную шину 10 смещения центра масс.
Устройство для определения величины и направления смещения центра масс аппарата (фиг. 14) содержит последовательно соединенные акселерометр 1, сумматор 2-1, блок 12-6 вычитания, блок 4 текущих координат центра масс, последовательно соединенные датчик 5 ускорения силы тяжести и блок 6 определения составляющих ускорения силы тяжести, выход которого соединен со вторым входом сумматора 2-1, и последовательно соединенные датчик 40 земных координат, блок 33 двойного дифференцирования, второй блок 41 определения составляющих абсолютного ускорения центра масс, второй вход которого соединен с выходом датчика 36 курса, третий вход, как и второй вход блока 6 определения составляющих ускорения силы тяжести - с выходом датчика 7 тангажа, четвертый вход, как и третий вход блока 6 определения составляющих ускорения силы тяжести - с выходом датчика 8 крена, а выход - со вторым входом блока 12-6 вычитания, выход датчика 9 угловых скоростей соединен со вторым входом блока 4 текущих координат центра масс, выход которого образует выходную шину 10 смещения центра масс.
Второй блок 41 определения составляющих абсолютного ускорения центра масс (фиг. 15) содержит последовательно соединенные преобразователи 18-8, 18-9, 18-10 координат так, что первый вход второго блока 41 определения составляющих абсолютного ускорения центра масс соединен с шиной 42 абсолютного ускорения земных координат аппарата, второй вход - с входами синусного и косинусного функциональных преобразователей 19-8, 20-8, третий вход - с входами синусного и косинусного функциональных преобразователей 19-9, 20-9, четвертый вход - с входами синусного и косинусного функциональных преобразователей 19-10, 20-10, а выход - с шиной 38 абсолютного ускорения центра масс аппарата, причем первый вход преобразователя 18-8 координат соединен с входом абсолютного ускорения по горизонтальной оси направления движения земной системы координат, второй вход - с выходом синусного функционального преобразователя 19-8, третий вход - с выходом косинусного функционального преобразователя 20-8, четвертый вход - с входом абсолютного ускорения по оси местной вертикали земной системы координат, пятый вход - с входом абсолютного ускорения по горизонтальной оси, перпендикулярной оси направления движения, земной системы координат, первый вход преобразователя 18-9 координат соединен с третьим выходом преобразователя 18-8 координат, второй вход - с выходом синусного функционального преобразователя 19-9, третий вход - с выходом косинусного функционального преобразователя 20-9, четвертый вход - с первым выходом преобразователя 18-8 координат, пятый вход - со вторым выходом преобразователя 18-8 координат, первый вход преобразователя 18-10 координат соединен с третьим выходом преобразователя 18-9 координат, второй вход - с выходом синусного функционального преобразователя 19-10, третий вход - с выходом косинусного функционального преобразователя 20-10, четвертый вход - с первым выходом преобразователя 18-9 координат, пятый вход - со вторым выходом преобразователя 18-9 координат, первый выход преобразователя 18-10 координат соединен с выходом нормальной составляющей абсолютного ускорения центра масс аппарата, второй выход - с выходом поперечной составляющей абсолютного ускорения центра масс аппарата, третий выход - с выходом продольной составляющей абсолютного ускорения центра масс аппарата.
Устройство для определения величины и направления смещения центра масс аппарата (фиг. 16) содержит последовательно соединенные акселерометр 1, сумматор 2-1, блок 12-6 вычитания, блок 4 текущих координат центра масс, последовательно соединенные датчик 5 ускорения силы тяжести и блок 6 определения составляющих ускорения силы тяжести, выход которого соединен со вторым входом сумматора 2-1, и последовательно соединенные датчик 43 скорости изменения земных координат, дифференциатор 29-4, второй блок 41 определения составляющих абсолютного ускорения центра масс, второй вход которого соединен с выходом датчика 36 курса, третий вход, как и второй вход блока 6 определения составляющих ускорения силы тяжести - с выходом датчика 7 тангажа, четвертый вход, как и третий вход блока 6 определения составляющих ускорения силы тяжести - с выходом датчика 8 крена, а выход - со вторым входом блока 12-6 вычитания, выход датчика 9 угловых скоростей соединен со вторым входом блока 4 текущих координат центра масс, выход которого образует выходную шину 10 смещения центра масс.
Устройство для определения величины и направления смещения центра масс аппарата (фиг. 17) содержит последовательно соединенные акселерометр 1, сумматор 2-1, блок 12-6 вычитания, блок 4 текущих координат центра масс, последовательно соединенные датчик 5 ускорения силы тяжести и блок 6 определения составляющих ускорения силы тяжести, второй вход которого соединен с выходом датчика 7 тангажа, третий вход - с выходом датчика 8 крена, а выход - со вторым входом сумматора 2-1, и последовательно соединенные датчик 44 скорости аппарата, третий блок 45 определения составляющих абсолютного ускорения центра масс, второй вход которого соединен с выходом датчика 9 угловых скоростей, а выход - со вторым входом блока 12-6 вычитания, второй вход блока 4 текущих координат центра масс соединен с выходом датчика 9 угловых скоростей, а выход образует выходную шину 10 смещения центра масс.
Третий блок 45 определения составляющих абсолютного ускорения центра масс (фиг. 18) содержит дифференциаторы 29-5, 29-6, 29-7, сумматоры 2-20, 2-21, 2-22, умножители 22-26, 22-27, 22-28, 22-2 9, 22-30, 22-31 так, что первый вход третьего блока 45 определения составляющих абсолютного ускорения центра масс соединен с шиной 46 скорости аппарата, второй вход - с шиной 47 абсолютной угловой скорости аппарата, а выход - с шиной 38 абсолютного ускорения центра масс аппарата, первые входы дифференциатора 29-5, умножителей 22-26, 22-27 соединены с входом скорости аппарата по продольной оси связанной системы координат, первые входы дифференциатора 29-6, умножителей 22-28, 22-29 соединены с входом скорости аппарата по нормальной оси связанной системы координат, первые входы дифференциатора 29-7, умножителей 22-30, 22-31 соединены с входом скорости аппарата по поперечной оси связанной системы координат, вторые входы умножителей 22-26, 22-28 соединены с входом угловой скорости по поперечной оси связанной системы координат, вторые входы умножителей 22-27, 22-31 соединены с входом угловой скорости по нормальной оси связанной системы координат, вторые входы умножителей 22-29, 22-30 соединены с входом угловой скорости по продольной оси связанной системы координат, первый суммирующий вход сумматора 2-20 соединен с выходом дифференциатора 29-5, второй вычитающий вход - с выходом умножителя 22-28, третий суммирующий вход - с выходом умножителя 22-31, а выход - с выходом продольной составляющей абсолютного ускорения центра масс аппарата, первый суммирующий вход сумматора 2-21 соединен с выходом дифференциатора 29-6, второй вычитающий вход - с выходом умножителя 22-30, третий суммирующий вход - с выходом умножителя 22-26, а выход - с выходом нормальной составляющей абсолютного ускорения центра масс аппарата, первый суммирующий вход сумматора 2-22 соединен с выходом дифференциатора 29-7, второй вычитающий вход - с выходом умножителя 22-27, третий суммирующий вход - с выходом умножителя 22-29, а выход - с выходом поперечной составляющей абсолютного, ускоренного центра масс аппарата.
Способ определения величины и направления смещения центра масс аппарата по п. 1, 2, 3 формулы осуществляют следующим образом. Измеряют текущие величину и направление абсолютной угловой скорости  кажущегося линейного ускорения
кажущегося линейного ускорения  , текущие углы тангажа ϑ и крена γ аппарата с помощью соответственно датчика угловых скоростей акселерометра, датчиков тангажа и крена гироскопического типа. Одновременно измеряют ускорение
, текущие углы тангажа ϑ и крена γ аппарата с помощью соответственно датчика угловых скоростей акселерометра, датчиков тангажа и крена гироскопического типа. Одновременно измеряют ускорение  силы тяжести в точке местоположения аппарата, например, гравиметром или с помощью датчиков широты ϕ и высоты H местоположения аппарата над поверхностью Земли. Величину g определяют согласно соотношения (8). Датчики угловых скоростей, тангажа, крена, широты, высоты, кажущегося ускорения - акселерометр могут входить в состав бортовой инерциальной системы аппарата. Гравиметр может быть расположен на аппарате либо на поверхности Земли в точке местоположения аппарата с одинаковым значением широты места. Значение измеренного ускорения g силы тяжести в последнем случае передается на аппарат, например по радиосвязи. После этого величина g уточняется по известной зависимости (8), в том случае, если аппарат расположен над поверхностью Земли. При этом высота H измеряется датчиком высоты аппарата. Применительно к летательному аппарату измерение величины ускорения g силы тяжести следует вести согласно соотношению (8) по широте ϕ и высоте H без гравиметрических измерений. Затем определяют величину и направление абсолютного линейного ускорения
силы тяжести в точке местоположения аппарата, например, гравиметром или с помощью датчиков широты ϕ и высоты H местоположения аппарата над поверхностью Земли. Величину g определяют согласно соотношения (8). Датчики угловых скоростей, тангажа, крена, широты, высоты, кажущегося ускорения - акселерометр могут входить в состав бортовой инерциальной системы аппарата. Гравиметр может быть расположен на аппарате либо на поверхности Земли в точке местоположения аппарата с одинаковым значением широты места. Значение измеренного ускорения g силы тяжести в последнем случае передается на аппарат, например по радиосвязи. После этого величина g уточняется по известной зависимости (8), в том случае, если аппарат расположен над поверхностью Земли. При этом высота H измеряется датчиком высоты аппарата. Применительно к летательному аппарату измерение величины ускорения g силы тяжести следует вести согласно соотношению (8) по широте ϕ и высоте H без гравиметрических измерений. Затем определяют величину и направление абсолютного линейного ускорения  аппарата, суммируя кажущееся линейное ускорение
аппарата, суммируя кажущееся линейное ускорение  и ускорение
и ускорение  силы тяжести в точке местоположения аппарата. Поскольку величина и направление абсолютного линейного ускорения
силы тяжести в точке местоположения аппарата. Поскольку величина и направление абсолютного линейного ускорения  аппарата отличается от величины и направления абсолютного линейного ускорения
аппарата отличается от величины и направления абсолютного линейного ускорения  его центра масс на величину и направление приращения
его центра масс на величину и направление приращения  абсолютного линейного ускорения аппарата из-за его углового движения относительно центра масс, то для нахождения смещения центра масс необходимо предварительно определить характеристики этого углового движения - величину и направление угловой скорости и углового ускорения. Измерение величины и направления абсолютного углового ускорения
абсолютного линейного ускорения аппарата из-за его углового движения относительно центра масс, то для нахождения смещения центра масс необходимо предварительно определить характеристики этого углового движения - величину и направление угловой скорости и углового ускорения. Измерение величины и направления абсолютного углового ускорения  осуществляют, предварительно измеряя величину и направление абсолютной угловой скорости
осуществляют, предварительно измеряя величину и направление абсолютной угловой скорости  аппарата. Затем по окончании периода времени меньшего периода собственных короткопериодических составляющих угловых колебаний аппарата относительно его центра масс измеряют величину и направление приращения абсолютной угловой скорости аппарата и запоминают их. После этого определяют величину и направление абсолютного углового ускорения
аппарата. Затем по окончании периода времени меньшего периода собственных короткопериодических составляющих угловых колебаний аппарата относительно его центра масс измеряют величину и направление приращения абсолютной угловой скорости аппарата и запоминают их. После этого определяют величину и направление абсолютного углового ускорения  аппарата по скорости приращения абсолютной угловой скорости за период времени меньший периода времени собственных короткопериодических составляющих угловых колебаний аппарата относительно его центра масс. Измерение абсолютного углового ускорения
аппарата по скорости приращения абсолютной угловой скорости за период времени меньший периода времени собственных короткопериодических составляющих угловых колебаний аппарата относительно его центра масс. Измерение абсолютного углового ускорения  возможно и с помощью специального датчика абсолютного углового ускорения аппарата, а не вышеуказанным дифференцированием выходной информации датчика угловых скоростей. Величину и направление приращения
возможно и с помощью специального датчика абсолютного углового ускорения аппарата, а не вышеуказанным дифференцированием выходной информации датчика угловых скоростей. Величину и направление приращения  абсолютного линейного ускорения аппарата по отношению к абсолютному линейному ускорению
абсолютного линейного ускорения аппарата по отношению к абсолютному линейному ускорению  аппарата в его центре масс определяют, узкополосно фильтруя на частоте собственных составляющих угловых колебаний аппарата относительно его центра масс сигнал, пропорциональный абсолютному линейному ускорению
аппарата в его центре масс определяют, узкополосно фильтруя на частоте собственных составляющих угловых колебаний аппарата относительно его центра масс сигнал, пропорциональный абсолютному линейному ускорению  аппарата. Аналогично определяется величина и направление угловой скорости и углового ускорения аппарата относительно его центра масс. На этой же частоте собственных периодических составляющих угловых колебаний аппарата узкополосно фильтруют сигналы, пропорциональные величине и направлению абсолютной угловой скорости и абсолютному угловому ускорению аппарата. Для летательного аппарата в качестве частоты собственных периодических составляющих угловых колебаний, на которой проводится указанная узкополосная фильтрация, выбирается частота короткопериодических составляющих угловых колебаний. Величину и направление приращения
аппарата. Аналогично определяется величина и направление угловой скорости и углового ускорения аппарата относительно его центра масс. На этой же частоте собственных периодических составляющих угловых колебаний аппарата узкополосно фильтруют сигналы, пропорциональные величине и направлению абсолютной угловой скорости и абсолютному угловому ускорению аппарата. Для летательного аппарата в качестве частоты собственных периодических составляющих угловых колебаний, на которой проводится указанная узкополосная фильтрация, выбирается частота короткопериодических составляющих угловых колебаний. Величину и направление приращения  абсолютного линейного ускорения аппарата можно определять и по разности абсолютного линейного ускорения
абсолютного линейного ускорения аппарата можно определять и по разности абсолютного линейного ускорения  аппарата и абсолютного линейного ускорения
аппарата и абсолютного линейного ускорения  аппарата в его центре масс, измеренного по ускорению аппарата относительно Земли. При этом используются измерения навигационных параметров линейного перемещения аппарата, которые определяют движение центра масс. Измерения проводится с помощью навигационной системы либо непосредственно [18, с. 111] , либо при двойном дифференцировании линейных координат местоположения аппарата [17, с. 36 - 37), либо при однократном дифференцировании его линейных скоростей [22, с. 106- 108, 23, с. 198], либо через величину и направление линейных и угловых скоростей аппарата, измеренных в его связанных осях [20, с. 263, 318].
аппарата в его центре масс, измеренного по ускорению аппарата относительно Земли. При этом используются измерения навигационных параметров линейного перемещения аппарата, которые определяют движение центра масс. Измерения проводится с помощью навигационной системы либо непосредственно [18, с. 111] , либо при двойном дифференцировании линейных координат местоположения аппарата [17, с. 36 - 37), либо при однократном дифференцировании его линейных скоростей [22, с. 106- 108, 23, с. 198], либо через величину и направление линейных и угловых скоростей аппарата, измеренных в его связанных осях [20, с. 263, 318].
Устройство для определения величины и направления смещения центра масс аппарата по п. 4 формулы (фиг. 2) работает следующим образом. Сигнал с выхода акселерометра 1, пропорциональный кажущемуся ускорению  , поступает на первый вход сумматора 2-1, на второй вход которого поступает сигнал, пропорциональный ускорению
, поступает на первый вход сумматора 2-1, на второй вход которого поступает сигнал, пропорциональный ускорению  силы тяжести, с выхода блока 6 определения составляющих ускорения силы тяжести. Последний формируется по сигналам датчика 5 ускорения силы тяжести, датчика 7 тангажа и датчика 8 крена, поступающим соответственно на первый, второй и третий входы блока 6 определения составляющих ускорения силы тяжести. После сложения сигналов, пропорциональных кажущемуся ускорению
силы тяжести, с выхода блока 6 определения составляющих ускорения силы тяжести. Последний формируется по сигналам датчика 5 ускорения силы тяжести, датчика 7 тангажа и датчика 8 крена, поступающим соответственно на первый, второй и третий входы блока 6 определения составляющих ускорения силы тяжести. После сложения сигналов, пропорциональных кажущемуся ускорению  и ускорению
и ускорению  силы тяжести, на выходе сумматора 2-1 получается сигнал, пропорциональный абсолютному линейному ускорению
силы тяжести, на выходе сумматора 2-1 получается сигнал, пропорциональный абсолютному линейному ускорению  аппарата. Он поступает на вход частотного селектора 3-1, где происходит его узкополосная фильтрация. На выходе частотного селектора 3-1 получается сигнал, пропорциональный приращению
аппарата. Он поступает на вход частотного селектора 3-1, где происходит его узкополосная фильтрация. На выходе частотного селектора 3-1 получается сигнал, пропорциональный приращению  абсолютного ускорения из-за углового движения аппарата относительно его центра масс. Сигнал с выхода частотного селектора 3-1 поступает на первый вход блока 4 текущих координат центра масс. Одновременно с выхода датчика 9 угловых скоростей сигнал, пропорциональный абсолютной угловой скорости
абсолютного ускорения из-за углового движения аппарата относительно его центра масс. Сигнал с выхода частотного селектора 3-1 поступает на первый вход блока 4 текущих координат центра масс. Одновременно с выхода датчика 9 угловых скоростей сигнал, пропорциональный абсолютной угловой скорости  аппарата, поступает на вход 18 частотного селектора 3-2, где он также узкополосно фильтруется для выделения сигнала, пропорционального угловому движению аппарата относительно центра масс. Этот сигнал поступает на второй вход блока 4 текущих координат центра масс. В блоке 4 текущих координат центра масс определяется смещение
аппарата, поступает на вход 18 частотного селектора 3-2, где он также узкополосно фильтруется для выделения сигнала, пропорционального угловому движению аппарата относительно центра масс. Этот сигнал поступает на второй вход блока 4 текущих координат центра масс. В блоке 4 текущих координат центра масс определяется смещение  центра масс по отношению к точке А, где расположен акселерометр 1 на аппарате.
центра масс по отношению к точке А, где расположен акселерометр 1 на аппарате.
Устройство для определения величины и направления смещения центра масс аппарата по п. 5 формулы (фиг. 3) работает следующим образом. Сигнал с выхода акселерометра 1, пропорциональный кажущемуся ускорению  , поступает на первый вход сумматора 2-1, на второй вход которого поступает сигнал, пропорциональный ускорению
, поступает на первый вход сумматора 2-1, на второй вход которого поступает сигнал, пропорциональный ускорению  силы тяжести, с выхода блока 6 определения составляющих ускорения силы тяжести. Последний формируется по сигналам датчика 5 ускорения силы тяжести, датчика 7 тангажа и датчика 8 крена, поступающим соответственно на первый, второй и третий входы блока 6 определения составляющих ускорения силы тяжести. После сложения сигналов, пропорциональных кажущемуся ускорению
силы тяжести, с выхода блока 6 определения составляющих ускорения силы тяжести. Последний формируется по сигналам датчика 5 ускорения силы тяжести, датчика 7 тангажа и датчика 8 крена, поступающим соответственно на первый, второй и третий входы блока 6 определения составляющих ускорения силы тяжести. После сложения сигналов, пропорциональных кажущемуся ускорению  и ускорению
и ускорению  силы тяжести, на выходе сумматора 2-1 получается сигнал, пропорциональный абсолютному линейному ускорению
силы тяжести, на выходе сумматора 2-1 получается сигнал, пропорциональный абсолютному линейному ускорению  аппарата. Он поступает на вход частотного селектора 3-1, где происходит его узкополосная фильтрация. На выходе частотного селектора 3-1 получается сигнал, пропорциональный приращению
аппарата. Он поступает на вход частотного селектора 3-1, где происходит его узкополосная фильтрация. На выходе частотного селектора 3-1 получается сигнал, пропорциональный приращению  абсолютного ускорения из-за углового движения аппарата относительно его центра масс. Сигнал с выхода частотного селектора 3-1 поступает на первый вход блока 4 текущих координат центра масс. Одновременно с выхода датчика 9 угловых скоростей сигнал, пропорциональный абсолютной угловой скорости
абсолютного ускорения из-за углового движения аппарата относительно его центра масс. Сигнал с выхода частотного селектора 3-1 поступает на первый вход блока 4 текущих координат центра масс. Одновременно с выхода датчика 9 угловых скоростей сигнал, пропорциональный абсолютной угловой скорости  аппарата, поступает на вход частотного селектора 3-2, где он также узкополосно фильтруется для выделения сигнала, пропорционального угловому движению аппарата относительно центра масс. Этот сигнал поступает на второй вход блока 4 текущих координат центра масс. В блоке 4 текущих координат центра масс определяется смещение
аппарата, поступает на вход частотного селектора 3-2, где он также узкополосно фильтруется для выделения сигнала, пропорционального угловому движению аппарата относительно центра масс. Этот сигнал поступает на второй вход блока 4 текущих координат центра масс. В блоке 4 текущих координат центра масс определяется смещение  центра масс по отношению к точке А, где расположен акселерометр 1 на аппарате. Сигнал, пропорциональный заданному смещению
центра масс по отношению к точке А, где расположен акселерометр 1 на аппарате. Сигнал, пропорциональный заданному смещению  центра масс с выхода задатчика 11 конструктивных координат акселерометра 1 на аппарате, поступает на первый вход блока 12-1 вычитания. На его второй вход поступает сигнал с выхода блока 4 текущих координат центра масс. Выходной сигнал блока 12-1 вычитания пропорционален отклонению
центра масс с выхода задатчика 11 конструктивных координат акселерометра 1 на аппарате, поступает на первый вход блока 12-1 вычитания. На его второй вход поступает сигнал с выхода блока 4 текущих координат центра масс. Выходной сигнал блока 12-1 вычитания пропорционален отклонению  смещения центра масс от заданного значения
смещения центра масс от заданного значения  и может быть проградуирован в процентах средней аэродинамической хорды (САХ) крыла для летательного аппарата.
и может быть проградуирован в процентах средней аэродинамической хорды (САХ) крыла для летательного аппарата.
Датчик 5 ускорения силы тяжести по п.6 формулы (фиг. 4) работает следующим образом. Сигнал, пропорциональный широте ϕ местоположения аппарата, с датчика 14 широты поступает на вход первого функционального преобразователя 15-1, где на выходе получается сигнал, пропорциональный 5,288•10-3 sin2 ϕ - изменение ускорения силы тяжести от широты места. Этот сигнал поступает на первый вычитающий вход сумматора 2-2. На второй суммирующий вход сумматора 2-2 поступает сигнал, пропорциональный 3,086•10-6 Н, с датчика 16 высоты местоположения аппарата над поверхностью Земли, а на третий вычитающий вход - постоянный сигнал, пропорциональный ускорению силы тяжести на экваторе 9,7804 9 м/с2, с датчика 17 эталонного значения ускорения силы тяжести. С выхода датчика 5 ускорения силы тяжести получается инвертированный по знаку сигнал, пропорциональный величине ускорения g силы тяжести в точке местоположения аппарата.
Блок 6 определения составляющих ускорения силы тяжести по п. 7 формулы (фиг. 5) работает следующим образом. Сигнал с первого входа блока 6 определения составляющих ускорения силы тяжести, пропорциональный инвертированной величине ускорения g силы тяжести, поступает на первый вход преобразователя 18-1 координат, на второй и третий входы которого поступают сигналы, пропорциональные соответственно sin ϑ и cos ϑ, с синусного 19-1 и косинусного 20-1 функциональных преобразователей. Входной сигнал последних, пропорциональный углу ϑ тангажа, поступает со второго входа блока 6 определения составляющих ускорения силы тяжести. С третьего входа блока 6 определения составляющих ускорения силы тяжести сигнал, пропорциональный углу γ крена, поступает на входы синусного 19-2 и косинусного 20-2 функциональных преобразователей. На второй и третий входы преобразователя 18-2 координат поступают сигналы, пропорциональные соответственно sin γ и cos γ, с синусного 19-2 и косинусного 20-2 функциональных преобразователей. На четвертый вход преобразователя 18-2 координат поступает сигнал, пропорциональный -g sin ϑ с первого выхода преобразователя 18-1 координат. На пятый вход поступает сигнал, пропорциональный -g cos ϑ со второго выхода преобразователя 18-1 координат. При этом с первого выхода преобразователя 18-2 получается сигнал, пропорциональный -g sin ϑ, со второго выхода - сигнал, пропорциональный - g cos ϑ cos γ, а с третьего выхода - сигнал, пропорциональный g cos ϑ sin γ Эти сигналы поступают на шину 21 ускорения силы тяжести и являются соответственно ускорением силы тяжести по нормальной оси связанной системы координат, ускорением силы тяжести по поперечной оси связанной системы координат и ускорением силы тяжести по продольной оси связанной системы координат аппарата.
Преобразователь 18-1, ... 18-10 координат по п. 8 формулы (фиг. 6) работает следующим образом. Сигнал с первого входа преобразователя 18-1, ... 18-10 координат поступает на первые входы умножителей 22- 1, 22-3, на вторые входы которых поступают сигналы соответственно со второго и третьего входов преобразователя 18-1, ... 18-10 координат. Выходной сигнал умножителя 22-1 поступает на первый вход сумматора 2-3, на второй вход которого поступает выходной сигнал умножителя 22-2. Последний осуществляет перемножение сигналов, поступающих на его первый и второй входы соответственно с пятого и третьего входов преобразователя 18-1, ... 18-10 координат. Выходной сигнал умножителя 22-3 поступает на суммирующий вход блока 12-2 вычитания, на вычитающий вход которого поступает выходной сигнал умножителя 22-4. Последний осуществляет перемножение сигналов, поступающих на его первый и второй входы соответственно с пятого и второго входов преобразователя 18-1, ... 18-10 координат. На первый выход преобразователя 18-1, ... 18-10 координат поступает сигнал с выхода сумматора 2-3, на второй выход - с выхода блока 12-2 вычитания, а на третий выход - с четвертого входа преобразователя 18-1, ... 18-10 координат. Преобразователи 18-1, ... 18- 10 координат осуществляют преобразование проекций вектора, поступающих в виде сигналов на первый, четвертый и пятый входы, из одной - исходной системы координат в другую - подвижную систему координат, две оси которой повернуты на угол, информация о котором в виде тригонометрических функций sin и cos поступает на второй и третий входы преобразователя 18-1, ... 18-10 координат. Проекции вектора в подвижной системе координат получаются согласно соотношениям (11).
Блок 4 текущих координат по п. 9 формулы (фиг. 7) работает следующим образом. Сигнал, пропорциональный величине и направлению приращения абсолютного ускорения по шине 25 приращения абсолютного ускорения, поступает на первый вход блока 4 текущих координат. Одновременно на его второй вход по шине 26 угловой скорости аппарата поступает сигнал, пропорциональный величине и направлению угловой скорости аппарата. С выхода блока 4 текущих координат по шине 10 смещения центра масс снимается сигнал, пропорциональный величине и направлению смещения центра масс аппарата. Блок 4 текущих координат содержит последовательно соединенные блок 23 определения проекций и интегратор 24 координат центра масс так, что на первый вход блока 23 определения проекций поступает сигнал, пропорциональный угловой скорости по поперечной оси связанной системы координат, на второй вход - сигнал, пропорциональный угловой скорости по нормальной оси связанной системы координат, на третий вход - сигнал, пропорциональный угловой скорости по продольной оси связанной системы координат, с шины 26 угловой скорости аппарата. Сигналы с первого по двенадцатый выхода блока 23 определения проекций, пропорциональные значениям коэффициентов уравнения (14), поступают на входы соответственно с первого по двенадцатый интегратора 24 координат центра масс. На тринадцатый вход интегратора 24 координат центра масс поступает сигнал, пропорциональный приращению абсолютного ускорения по продольной оси связанной системы координат, на четырнадцатый вход - сигнал, пропорциональный приращению абсолютного ускорения по нормальной оси связанной системы координат, на пятнадцатый вход - сигнал, пропорциональный приращению абсолютного ускорения по поперечной оси связанной системы координат шины 25 приращения абсолютного ускорения. С первого выхода интегратора 24 координат центра масс на шину 10 смещения центра масс поступает сигнал, пропорциональный смещению центра масс по продольной оси связанной системы координат, со второго выхода - сигнал, пропорциональный смещению центра масс по нормальной оси связанной системы координат, а с третьего выхода - сигнал, пропорциональный смещению центра масс по поперечной оси связанной системы координат.
Блок 23 определения проекций по п. 10 формулы (фиг. 8) работает следующим образом. Сигнал, пропорциональный угловой скорости по поперечной оси связанной системы координат с первого входа блока 23 определения проекций, поступает на вход дифференциатора 29-1, усилителя 28-1, первые входы умножителей 22-5, 22-6 и оба входа умножителя 22-7. Сигнал, пропорциональный угловой скорости по нормальной оси связанной системы координат со второго входа блока 23 определения проекций, поступает на вход дифференциатора 29-2, усилителя 28-2, первый вход умножителя 22-8, второй вход умножителя 28-5 и оба входа умножителя 22-9. Сигнал, пропорциональный угловой скорости по продольной оси связанной системы координат с третьего входа блока 23 определения проекций, поступает на вход дифференциатора 29-3, усилителя 28-3, вторые входы умножителей 22-6, 22-8 и оба входа умножителя 22-10. Сигнал с выхода дифференциатора 29-1 поступает на первый вход сумматора 2-4 и вычитающий вход блока 12-3 вычитания, на вторые суммирующие входы которых поступает сигнал с выхода умножителя 22-8. Сигнал с выхода дифференциатора 29-2 поступает на первый вход сумматора 2-5 и вычитающий вход блока 12-4 вычитания, на вторые суммирующие входы которых поступает сигнал с выхода умножители 22-6. Сигнал с выхода дифференциатора 29-3 поступает на первый вход сумматора 2-6 и вычитающий вход блока 12-5 вычитания, на вторые суммирующие входы которых поступает сигнал с выхода умножителя 22-5. Сигнал с выхода умножителя 22-7 поступает на первые входы сумматоров 2-7, 2-8. На второй вход сумматора 2-8 и первый вход сумматора 2-9 поступает сигнал с выхода умножителя 22-9. На вторые входы сумматоров 2-7, 2-9 поступает сигнал с выхода умножителя 22-10. На вход инвертора 27-1 поступает сигнал с выхода сумматора 2-8, где после инвертирования знака получается сигнал, поступающий на первый выход блока 23 определения проекций, на второй выход которого поступает сигнал с выхода блока 12-3 вычитания, на третий выход - с выхода сумматора 2-5, на четвертый выход - с выхода сумматора 2-4. На вход инвертора 27-2 поступает сигнал с выхода сумматора 2-7, где после инвертирования знака получается сигнал, поступающий на пятый выход блока 23 определения проекций, на шестой выход которого поступает сигнал с выхода блока 12-5 вычитания, на седьмой выход - с выхода блока 12-4 вычитания, на восьмой выход - с выхода сумматора 2-6. На вход инвертора 27-3 поступает сигнал с выхода сумматора 2-9, где после инвертирования знака получается сигнал, поступающий на девятый выход блока 23 определения проекций, на десятый выход которого поступает сигнал с выхода усилителя 28-1, на одиннадцатый выход - с выхода усилителя 28-3, на двенадцатый выход - с выхода усилителя 28-2. На первом выходе блока 23 определения проекций получается значение коэффициента a11 уравнения (14), на втором выходе - значение a12, на третьем выходе - значение a13, на четвертом выходе - значение a21, на пятом выходе - значение a22, на шестом выходе - значение a23, на седьмом выходе - значение a31, на восьмом выходе - значение a32, на девятом выходе - значение a33, на десятом выходе - значение 2ωz, на одиннадцатом выходе - значение 2ωx , на двенадцатом выходе - значение 2ωy.
Интегратор 24 координат центра масс по п. 11 формулы (фиг. 9) работает следующим образом. Сигнал, пропорциональный приращению Δ Wx абсолютного ускорения по продольной оси связанной системы координат, с тринадцатого входа интегратора 24 координат центра масс поступает на второй вход сумматора 2-10, на выходе которого получается сигнал  , пропорциональный ускорению смещения центра масс по продольной оси связанной системы координат. Он поступает на вход интегратора 30-1, на выходе которого получается сигнал
, пропорциональный ускорению смещения центра масс по продольной оси связанной системы координат. Он поступает на вход интегратора 30-1, на выходе которого получается сигнал  , пропорциональный скорости смещения центра масс по продольной оси связанной системы координат и поступающий на вторые входы умножителей 22-22, 22-23 и вход интегратора 30-2. На выходе последнего получается сигнал X, пропорциональный смещению центра масс по продольной оси связанной системы координат, который поступает на первый выход интегратора 24 координат центра масс и после инвертирования по знаку в инверторе 27-4, на вторые входы умножителей 22-17, 22-21 и первый вход умножителя 22-11, на второй вход которого поступает сигнал, пропорциональный a11, с первого входа интегратора 24 координат центра масс. Выходной сигнал умножителя 22-11 поступает на первый вход сумматора 2-10. Сигнал, пропорциональный приращению Δ Wу абсолютного ускорения по нормальной оси связанной системы координат, с четырнадцатого входа интегратора 24 координат центра масс поступает на второй вход сумматора 2-11, на выходе которого получается сигнал
, пропорциональный скорости смещения центра масс по продольной оси связанной системы координат и поступающий на вторые входы умножителей 22-22, 22-23 и вход интегратора 30-2. На выходе последнего получается сигнал X, пропорциональный смещению центра масс по продольной оси связанной системы координат, который поступает на первый выход интегратора 24 координат центра масс и после инвертирования по знаку в инверторе 27-4, на вторые входы умножителей 22-17, 22-21 и первый вход умножителя 22-11, на второй вход которого поступает сигнал, пропорциональный a11, с первого входа интегратора 24 координат центра масс. Выходной сигнал умножителя 22-11 поступает на первый вход сумматора 2-10. Сигнал, пропорциональный приращению Δ Wу абсолютного ускорения по нормальной оси связанной системы координат, с четырнадцатого входа интегратора 24 координат центра масс поступает на второй вход сумматора 2-11, на выходе которого получается сигнал  , пропорциональный ускорению смещения центра масс по нормальной оси связанной системы координат. Он поступает на вход интегратора 30-3, на выходе которого получается сигнал
, пропорциональный ускорению смещения центра масс по нормальной оси связанной системы координат. Он поступает на вход интегратора 30-3, на выходе которого получается сигнал  , пропорциональный скорости смещения центра масс по нормальной оси связанной системы координат и поступающий на вторые входы умножителей 22-14, 22-24 и вход интегратора 30-4. На выходе последнего получается сигнал Y, пропорциональный смещению центра масс по нормальной оси связанной системы координат, который поступает на второй выход интегратора 24 координат центра масс и после инвертирования по знаку в инверторе 27-6 на вторые входы умножителей 22-12, 22-20 и первый вход умножителя 22-15, на второй вход которого поступает сигнал пропорциональный a22, с пятого входа интегратора 24 координат центра масс. Выходной сигнал умножителя 22-15 поступает на первый вход сумматора 2-11. Сигнал, пропорциональный
, пропорциональный скорости смещения центра масс по нормальной оси связанной системы координат и поступающий на вторые входы умножителей 22-14, 22-24 и вход интегратора 30-4. На выходе последнего получается сигнал Y, пропорциональный смещению центра масс по нормальной оси связанной системы координат, который поступает на второй выход интегратора 24 координат центра масс и после инвертирования по знаку в инверторе 27-6 на вторые входы умножителей 22-12, 22-20 и первый вход умножителя 22-15, на второй вход которого поступает сигнал пропорциональный a22, с пятого входа интегратора 24 координат центра масс. Выходной сигнал умножителя 22-15 поступает на первый вход сумматора 2-11. Сигнал, пропорциональный
приращению Δ Wz абсолютного ускорения по поперечной оси связанной системы координат с пятнадцатого входа интегратора 24 координат центра масс поступает на второй вход сумматора 2-12, на выходе которого получается сигнал  , пропорциональный ускорению смещения центра масс по поперечной оси связанной системы координат. Он поступает на вход интегратора 30-5, на выходе которого получается сигнал
, пропорциональный ускорению смещения центра масс по поперечной оси связанной системы координат. Он поступает на вход интегратора 30-5, на выходе которого получается сигнал  , пропорциональный скорости смещения центра масс по поперечной оси связанной системы координат и поступающий на вторые входы умножителей 22-18, 22-25 и вход интегратора 30-6. На выходе последнего получается сигнал Z, пропорциональный смещению центра масс по поперечной оси связанной системы координат, который поступает на третий выход интегратора 24 координат центра масс и после инвертирования по знаку в инверторе 27-8 - на вторые входы умножителей 22-13, 22-16 и первый вход умножителя 22-19, на второй вход которого поступает сигнал, пропорциональный a33, с девятого входа интегратора 24 координат центра масс. Выходной сигнал умножителя 22-19 поступает на первый вход сумматора 2-12. Сигнал, пропорциональный a12, со второго входа интегратора 24 координат центра масс поступает на первый вход умножителя 22-12, с выхода которого сигнал поступает на третий вход сумматора 2-10. Сигнал, пропорциональный a13, с третьего входа интегратора 24 координат центра масс поступает на первый вход умножителя 22-13, с выхода которого сигнал поступает на четвертый вход сумматора 2-10. Сигнал, пропорциональный a21, с четвертого входа интегратора 24 координат центра масс поступает на первый вход умножителя 22-17, с выхода которого сигнал поступает на четвертый вход сумматора 2-11. Сигнал, пропорциональный a23, с шестого входа интегратора 24 координат центра масс поступает на первый вход умножителя 22-16, с выхода которого сигнал поступает на третий вход сумматора 2-11. Сигнал, пропорциональный a31, с седьмого входа интегратора 24 координат центра масс поступает на первый вход умножителя 22-21, с выхода которого сигнал поступает на пятый вход сумматора 2-12. Сигнал, пропорциональный a32, с восьмого входа интегратора 24 координат центра масс поступает на первый вход умножителя 22-20, с выхода которого сигнал поступает на третий вход сумматора 2-12. Сигнал, пропорциональный 2ωz, с десятого входа интегратора 24 координат центра масс поступает на первые входы умножителей 22-14, 22-23. При этом выходной сигнал умножителя 22-14 поступает на пятый вход сумматора 2-10, а выходной сигнал умножителя 22-23, пройдя через инвертор 27-7, поступает на шестой вход сумматора 2-11. Сигнал, пропорциональный 2ωx, с одиннадцатого входа интегратора 24 координат центра масс поступает на первые входы умножителей 22- 18, 22-24. При этом выходной сигнал умножителя 22-18 поступает на пятый вход сумматора 2-11, а выходной сигнал умножителя 22-24, пройдя через инвертор 27-9, поступает на шестой вход сумматора 2-12. Сигнал, пропорциональный 2ωy, с двенадцатого входа интегратора 24 координат центра масс поступает на первые входы умножителей 22-22, 22-25. При этом выходной сигнал умножителя 22- 22 поступает на пятый вход сумматора 2-12. а выходной сигнал умножителя 22-25, пройдя через инвертор 27-5, поступает на шестой вход сумматора 2-10.
, пропорциональный скорости смещения центра масс по поперечной оси связанной системы координат и поступающий на вторые входы умножителей 22-18, 22-25 и вход интегратора 30-6. На выходе последнего получается сигнал Z, пропорциональный смещению центра масс по поперечной оси связанной системы координат, который поступает на третий выход интегратора 24 координат центра масс и после инвертирования по знаку в инверторе 27-8 - на вторые входы умножителей 22-13, 22-16 и первый вход умножителя 22-19, на второй вход которого поступает сигнал, пропорциональный a33, с девятого входа интегратора 24 координат центра масс. Выходной сигнал умножителя 22-19 поступает на первый вход сумматора 2-12. Сигнал, пропорциональный a12, со второго входа интегратора 24 координат центра масс поступает на первый вход умножителя 22-12, с выхода которого сигнал поступает на третий вход сумматора 2-10. Сигнал, пропорциональный a13, с третьего входа интегратора 24 координат центра масс поступает на первый вход умножителя 22-13, с выхода которого сигнал поступает на четвертый вход сумматора 2-10. Сигнал, пропорциональный a21, с четвертого входа интегратора 24 координат центра масс поступает на первый вход умножителя 22-17, с выхода которого сигнал поступает на четвертый вход сумматора 2-11. Сигнал, пропорциональный a23, с шестого входа интегратора 24 координат центра масс поступает на первый вход умножителя 22-16, с выхода которого сигнал поступает на третий вход сумматора 2-11. Сигнал, пропорциональный a31, с седьмого входа интегратора 24 координат центра масс поступает на первый вход умножителя 22-21, с выхода которого сигнал поступает на пятый вход сумматора 2-12. Сигнал, пропорциональный a32, с восьмого входа интегратора 24 координат центра масс поступает на первый вход умножителя 22-20, с выхода которого сигнал поступает на третий вход сумматора 2-12. Сигнал, пропорциональный 2ωz, с десятого входа интегратора 24 координат центра масс поступает на первые входы умножителей 22-14, 22-23. При этом выходной сигнал умножителя 22-14 поступает на пятый вход сумматора 2-10, а выходной сигнал умножителя 22-23, пройдя через инвертор 27-7, поступает на шестой вход сумматора 2-11. Сигнал, пропорциональный 2ωx, с одиннадцатого входа интегратора 24 координат центра масс поступает на первые входы умножителей 22- 18, 22-24. При этом выходной сигнал умножителя 22-18 поступает на пятый вход сумматора 2-11, а выходной сигнал умножителя 22-24, пройдя через инвертор 27-9, поступает на шестой вход сумматора 2-12. Сигнал, пропорциональный 2ωy, с двенадцатого входа интегратора 24 координат центра масс поступает на первые входы умножителей 22-22, 22-25. При этом выходной сигнал умножителя 22- 22 поступает на пятый вход сумматора 2-12. а выходной сигнал умножителя 22-25, пройдя через инвертор 27-5, поступает на шестой вход сумматора 2-10.
Частотный селектор 3-1, 3-2 по п. 12 формулы (фиг. 10) работает следующим образом. Входной сигнал частотного селектора 3-1, 3-2 поступает на первый вход сумматора 2-13, где он суммируется с выходным сигналом усилителя 28-8 так, что выходной сигнал сумматора 2-13 поступает на суммирующие первые входы сумматоров 2-14, 2-15. На второй и третий вычитающие входы сумматора 2-15 поступает выходной сигнал схемы 31-4 задержки. С выхода сумматора 2-15 сигнал поступает на первый вычитающий вход сумматора 2-16, второй суммирующий вход сумматора 2-14 и вход усилителя 28-4, выходной сигнал которого, в свою очередь, поступает на третий и четвертый вычитающий входы сумматора 2-14, второй суммирующий вход сумматора 2-16, усилитель 28-5 и выход частотного селектора 3-1, 3-2. При этом выходной сигнал усилителя 28-5, пройдя через усилитель 28-6, поступает на пятый вычитающий вход сумматора 2-14, третий суммирующий вход сумматора 2-16 и первый вычитающий вход сумматора 2-17, выходной сигнал которого поступает на вход схемы 31-1 задержки. После задержки сигнала на время, равное такту решения задачи в частотном селекторе 3-1, 3-2, выходной сигнал схемы 31-1 задержки поступает на первый вход сумматора 2-18, на второй вход которого поступает выходной сигнал сумматора 2-16, прошедший усилитель 28-7. Выходной сигнал сумматора 2-18, равный сумме выходных сигналов схемы 31-1 задержки и усилителя 28-7, поступает на вход схемы 31-2 задержки. После задержки этого сигнала на выходе схемы 31-2 задержки получается сигнал, поступающий на первый вход сумматора 2-19, на второй вход которого поступает выходной сигнал сумматора 2-14. После суммирования сигналов выходной сигнал сумматора 2-19 поступает на вход схемы 31-3 задержки, где сигнал также задерживается на время такта решения задачи в частотном селекторе 3-1, 3-2. Выходной сигнал схемы 31-3 задержки поступает на вход схемы 31-4 задержки и через усилитель 28-8 на второй вход сумматора 2-13. Сигнал с выхода схемы 31-3 задержки также задерживается на время такта решения задачи в схеме 31-4 задержки и с ее выхода поступает на второй и третий вычитающие входы сумматора 2-15 и второй вычитающий вход сумматора 2-17. Частотный селектор 3-1, 3-2 обеспечивает узкополосную фильтрацию сигналов, пропорциональных абсолютным ускорению и угловой скорости аппарата по каждой составляющей.
Устройство для определения величины и направления смещения центра масс аппарата по п. 13 формулы (фиг. 11) работает следующим образом. Сигнал с выхода акселерометра 1, пропорциональный кажущемуся ускорению  , поступает на первый вход сумматора 2-1, на второй вход которого поступает сигнал, пропорциональный ускорению
, поступает на первый вход сумматора 2-1, на второй вход которого поступает сигнал, пропорциональный ускорению  силы тяжести, с выхода блока 6 определения составляющих ускорения силы тяжести. Последний формируется по сигналам датчика 5 ускорения силы тяжести, датчика 7 тангажа и датчика 8 крена, поступающим соответственно на первый, второй и третий входы блока 6 определения составляющих ускорения силы тяжести. После сложения сигналов, пропорциональных кажущемуся ускорению
силы тяжести, с выхода блока 6 определения составляющих ускорения силы тяжести. Последний формируется по сигналам датчика 5 ускорения силы тяжести, датчика 7 тангажа и датчика 8 крена, поступающим соответственно на первый, второй и третий входы блока 6 определения составляющих ускорения силы тяжести. После сложения сигналов, пропорциональных кажущемуся ускорению  и ускорению
и ускорению  силы тяжести, на выходе сумматора 2-1 получается сигнал, пропорциональный абсолютному линейному ускорению
силы тяжести, на выходе сумматора 2-1 получается сигнал, пропорциональный абсолютному линейному ускорению  аппарата. Он поступает на первый суммирующий вход блока 12-6 вычитания, где из него вычитается сигнал, пропорциональный абсолютному ускорению
аппарата. Он поступает на первый суммирующий вход блока 12-6 вычитания, где из него вычитается сигнал, пропорциональный абсолютному ускорению  центра масс аппарата, поступающий на второй вычитающий вход блока 12-6 вычитания. Сигнал, пропорциональный абсолютному ускорению
центра масс аппарата, поступающий на второй вычитающий вход блока 12-6 вычитания. Сигнал, пропорциональный абсолютному ускорению  центра масс аппарата, получается на выходе первого блока 34 определения составляющих абсолютного ускорения центра масс. При этом на его первый вход поступает сигнал, пропорциональный абсолютному ускорению
центра масс аппарата, получается на выходе первого блока 34 определения составляющих абсолютного ускорения центра масс. При этом на его первый вход поступает сигнал, пропорциональный абсолютному ускорению  геоцентрических координат аппарата, с выхода блока 33 двойного дифференцирования, на второй вход - сигнал, пропорциональный долготе λ местоположения аппарата, с выхода датчика 35 долготы, на третий вход - сигнал, пропорциональный широте ϕ местоположения аппарата, с выхода датчика 14 широты, на четвертый вход - сигнал, пропорциональный курсу ψ аппарата, с выхода датчика 36 курса, на пятый вход - сигнал, пропорциональный тангажу ϑ аппарата, с выхода датчика 7 тангажа, на шестой вход - сигнал, пропорциональный крену γ аппарата, с выхода датчика 8 крена. Сигнал, пропорциональный абсолютному ускорению
геоцентрических координат аппарата, с выхода блока 33 двойного дифференцирования, на второй вход - сигнал, пропорциональный долготе λ местоположения аппарата, с выхода датчика 35 долготы, на третий вход - сигнал, пропорциональный широте ϕ местоположения аппарата, с выхода датчика 14 широты, на четвертый вход - сигнал, пропорциональный курсу ψ аппарата, с выхода датчика 36 курса, на пятый вход - сигнал, пропорциональный тангажу ϑ аппарата, с выхода датчика 7 тангажа, на шестой вход - сигнал, пропорциональный крену γ аппарата, с выхода датчика 8 крена. Сигнал, пропорциональный абсолютному ускорению  геоцентрических координат аппарата, получается на выходе блока 33 двойного дифференцирования после двойного дифференцирования в нем выходного сигнала датчика 32 геоцентрических координат. Сигнал с выхода блока 12-6 вычитания, пропорциональный приращению
геоцентрических координат аппарата, получается на выходе блока 33 двойного дифференцирования после двойного дифференцирования в нем выходного сигнала датчика 32 геоцентрических координат. Сигнал с выхода блока 12-6 вычитания, пропорциональный приращению  абсолютного ускорения, поступает на первый вход блока 4 текущих координат центра масс. Одновременно с выхода датчика 9 угловых скоростей сигнал, пропорциональный абсолютной угловой скорости
абсолютного ускорения, поступает на первый вход блока 4 текущих координат центра масс. Одновременно с выхода датчика 9 угловых скоростей сигнал, пропорциональный абсолютной угловой скорости  аппарата, поступает на второй вход блока 4 текущих координат центра масс. В блоке 4 текущих координат центра масс определяется смещение
аппарата, поступает на второй вход блока 4 текущих координат центра масс. В блоке 4 текущих координат центра масс определяется смещение  центра масс по отношению к точке А, где расположен акселерометр 1 на аппарате.
центра масс по отношению к точке А, где расположен акселерометр 1 на аппарате.
Первый блок 34 определения составляющих абсолютного ускорения центра масс по п. 14 формулы (фиг. 12) работает следующим образом. Сигнал с шины 37 абсолютного ускорения геоцентрических координат аппарата поступает на первый вход первого блока 34 определения составляющих абсолютного ускорения центра масс. Причем на первый вход его преобразователя 18-3 координат поступает сигнал, пропорциональный абсолютному ускорению  геоцентрических координат аппарата по оси, перпендикулярной плоскости нулевого меридиана и расположенной в плоскости экватора, на второй и третий вход - сигналы, пропорциональные sin λ и cosλ, соответственно с синусного 19-3 и косинусного 20-3 функциональных преобразователей, на четвертый вход - сигнал, пропорциональный абсолютному ускорению
геоцентрических координат аппарата по оси, перпендикулярной плоскости нулевого меридиана и расположенной в плоскости экватора, на второй и третий вход - сигналы, пропорциональные sin λ и cosλ, соответственно с синусного 19-3 и косинусного 20-3 функциональных преобразователей, на четвертый вход - сигнал, пропорциональный абсолютному ускорению  геоцентрических координат аппарата по оси вращения Земли, на пятый вход - сигнал, пропорциональный абсолютному ускорению
геоцентрических координат аппарата по оси вращения Земли, на пятый вход - сигнал, пропорциональный абсолютному ускорению  геоцентрических координат аппарата по оси в плоскости экватора и нулевого меридиана. Входной сигнал синусного 19-3 и косинусного 20-3 функциональных преобразователей, пропорциональный углу λ долготы местоположения аппарата, поступает со второго входа первого блока 34 определения составляющих абсолютного ускорения центра масс. На первый вход преобразователя 18-4 координат поступает сигнал с третьего выхода преобразователя 18-3 координат, на второй и третий вход - сигналы, пропорциональные sin ϕ и cos ϕ, соответственно с синусного 19-4 и косинусного 20-4 функциональных преобразователей, на четвертый вход - сигнал с первого выхода преобразователя 18-3 координат, на пятый вход - сигнал со второго выхода преобразователя 18-3 координат. Входной сигнал синусного 19-4 и косинусного 20-4 функциональных преобразователей, пропорциональный углу ϕ широты местоположения аппарата, поступает с третьего входа первого блока 34 определения составляющих абсолютного ускорения центра масс. На первый вход преобразователя 18-5 координат поступает сигнал с третьего выхода преобразователя 18-4 координат, на второй и третий вход - сигналы, пропорциональные sin ψ и cos ψ, соответственно с синусного 19-5 и косинусного 20-5 функциональных преобразователей, на четвертый вход - сигнал с первого выхода преобразователя 18-4 координат, на пятый вход - сигнал со второго выхода преобразователя 18-4 координат. Входной сигнал синусного 19-5 и косинусного 20-5 функциональных преобразователей, пропорциональный углу ψ курса аппараты, поступает с четвертого входа первого блока 34 определения составляющих абсолютного ускорения центра масс. На первый вход преобразователя 18-6 координат поступает сигнал с третьего выхода преобразователя 18-5 координат, на второй и третий вход - сигналы, пропорциональные sin ϑ и cos ϑ, соответственно с синусного 19-6 и косинусного 20-6 функциональных преобразователей, на четвертый вход - сигнал с первого выхода преобразователя 18-5 координат, на пятый вход - сигнал со второго выхода преобразователя 18-5 координат. Входной сигнал синусного 19-6 и косинусного 20-6 функциональных преобразователей, пропорциональный углу ϑ тангажа аппарата, поступает с пятого входа первого блока 34 определения составляющих абсолютного ускорения центра масс. На первый вход преобразователя 18-7 координат поступает сигнал с третьего выхода преобразователя 18-6 координат, на второй и третий вход - сигналы, пропорциональные sin γ и cos γ, соответственно с синусного 19-7 и косинусного 20-7 функциональных преобразователей, на четвертый вход - сигнал с первого выхода преобразователя 18-6 координат, на пятый вход - сигнал со второго выхода преобразователя 18-6 координат. Входной сигнал синусного 19-7 и косинусного 20-7 функциональных преобразователей, пропорциональный углу γ крена аппарата, поступает с шестого входа первого блока 34 определения составляющих абсолютного ускорения центра масс, выход которого соединен с шиной 38 абсолютного ускорения центра масс аппарата так, что сигнал, пропорциональный нормальной составляющей абсолютного ускорения WYO центра масс аппарата, поступает с первого выхода преобразователя 18-7 координат, сигнал, пропорциональный поперечной составляющей абсолютного ускорения WZO центра масс аппарата, поступает со второго выхода преобразователя 18-7 координат, а сигнал, пропорциональный продольной составляющей абсолютного ускорения WXO центра масс аппарата, поступает с третьего выхода преобразователя 18-7 координат.
геоцентрических координат аппарата по оси в плоскости экватора и нулевого меридиана. Входной сигнал синусного 19-3 и косинусного 20-3 функциональных преобразователей, пропорциональный углу λ долготы местоположения аппарата, поступает со второго входа первого блока 34 определения составляющих абсолютного ускорения центра масс. На первый вход преобразователя 18-4 координат поступает сигнал с третьего выхода преобразователя 18-3 координат, на второй и третий вход - сигналы, пропорциональные sin ϕ и cos ϕ, соответственно с синусного 19-4 и косинусного 20-4 функциональных преобразователей, на четвертый вход - сигнал с первого выхода преобразователя 18-3 координат, на пятый вход - сигнал со второго выхода преобразователя 18-3 координат. Входной сигнал синусного 19-4 и косинусного 20-4 функциональных преобразователей, пропорциональный углу ϕ широты местоположения аппарата, поступает с третьего входа первого блока 34 определения составляющих абсолютного ускорения центра масс. На первый вход преобразователя 18-5 координат поступает сигнал с третьего выхода преобразователя 18-4 координат, на второй и третий вход - сигналы, пропорциональные sin ψ и cos ψ, соответственно с синусного 19-5 и косинусного 20-5 функциональных преобразователей, на четвертый вход - сигнал с первого выхода преобразователя 18-4 координат, на пятый вход - сигнал со второго выхода преобразователя 18-4 координат. Входной сигнал синусного 19-5 и косинусного 20-5 функциональных преобразователей, пропорциональный углу ψ курса аппараты, поступает с четвертого входа первого блока 34 определения составляющих абсолютного ускорения центра масс. На первый вход преобразователя 18-6 координат поступает сигнал с третьего выхода преобразователя 18-5 координат, на второй и третий вход - сигналы, пропорциональные sin ϑ и cos ϑ, соответственно с синусного 19-6 и косинусного 20-6 функциональных преобразователей, на четвертый вход - сигнал с первого выхода преобразователя 18-5 координат, на пятый вход - сигнал со второго выхода преобразователя 18-5 координат. Входной сигнал синусного 19-6 и косинусного 20-6 функциональных преобразователей, пропорциональный углу ϑ тангажа аппарата, поступает с пятого входа первого блока 34 определения составляющих абсолютного ускорения центра масс. На первый вход преобразователя 18-7 координат поступает сигнал с третьего выхода преобразователя 18-6 координат, на второй и третий вход - сигналы, пропорциональные sin γ и cos γ, соответственно с синусного 19-7 и косинусного 20-7 функциональных преобразователей, на четвертый вход - сигнал с первого выхода преобразователя 18-6 координат, на пятый вход - сигнал со второго выхода преобразователя 18-6 координат. Входной сигнал синусного 19-7 и косинусного 20-7 функциональных преобразователей, пропорциональный углу γ крена аппарата, поступает с шестого входа первого блока 34 определения составляющих абсолютного ускорения центра масс, выход которого соединен с шиной 38 абсолютного ускорения центра масс аппарата так, что сигнал, пропорциональный нормальной составляющей абсолютного ускорения WYO центра масс аппарата, поступает с первого выхода преобразователя 18-7 координат, сигнал, пропорциональный поперечной составляющей абсолютного ускорения WZO центра масс аппарата, поступает со второго выхода преобразователя 18-7 координат, а сигнал, пропорциональный продольной составляющей абсолютного ускорения WXO центра масс аппарата, поступает с третьего выхода преобразователя 18-7 координат.
Устройство для определения величины и направления смещения центра масс аппарата по п. 15 формулы (фиг. 13) работает следующим образом. Сигнал с выхода акселерометра 1, пропорциональный кажущемуся ускорению  , поступает на первый вход сумматора 2-1, на второй вход которого поступает сигнал, пропорциональный ускорению
, поступает на первый вход сумматора 2-1, на второй вход которого поступает сигнал, пропорциональный ускорению  силы тяжести, с выхода блока 6 определения составляющих ускорения силы тяжести. Последний формируется по сигналам датчика 5 ускорения силы тяжести, датчика 7 тангажа и датчика 8 крена, поступающим соответственно на первый, второй и третий входы блока 6 определения составляющих ускорения силы тяжести. После сложения сигналов, пропорциональных кажущемуся ускорению
силы тяжести, с выхода блока 6 определения составляющих ускорения силы тяжести. Последний формируется по сигналам датчика 5 ускорения силы тяжести, датчика 7 тангажа и датчика 8 крена, поступающим соответственно на первый, второй и третий входы блока 6 определения составляющих ускорения силы тяжести. После сложения сигналов, пропорциональных кажущемуся ускорению  и ускорению
и ускорению  силы тяжести, на выходе сумматора 2-1 получается сигнал, пропорциональный абсолютному линейному ускорению
силы тяжести, на выходе сумматора 2-1 получается сигнал, пропорциональный абсолютному линейному ускорению  аппарата. Он поступает на первый суммирующий вход блока 12-6 вычитания, где из него вычитается сигнал, пропорциональный абсолютному ускорению
аппарата. Он поступает на первый суммирующий вход блока 12-6 вычитания, где из него вычитается сигнал, пропорциональный абсолютному ускорению  центра масс аппарата, поступающий на второй вычитающий вход блока 12-6 вычитания. Сигнал, пропорциональный абсолютному ускорению
центра масс аппарата, поступающий на второй вычитающий вход блока 12-6 вычитания. Сигнал, пропорциональный абсолютному ускорению  центра масс аппарата, получается на выходе первого блока 34 определения составляющих абсолютного ускорения центра масс. При этом на его первый вход поступает сигнал, пропорциональный абсолютному ускорению
центра масс аппарата, получается на выходе первого блока 34 определения составляющих абсолютного ускорения центра масс. При этом на его первый вход поступает сигнал, пропорциональный абсолютному ускорению  геоцентрических координат аппарата, с выхода дифференциатора 29-4, на второй вход - сигнал, пропорциональный долготе λ местоположения аппарата с выхода датчика 35 долготы, на третий вход - сигнал, пропорциональный широте ϕ местоположения аппарата, с выхода датчика 14 широты, на четвертый вход - сигнал, пропорциональный курсу ψ аппарата, с выхода датчика 36 курса, на пятый вход - сигнал, пропорциональный тангажу ϑ аппарата, с выхода датчика 7 тангажа, на шестой вход - сигнал, пропорциональный крену γ аппараты, с выхода датчика 8 крена. Сигнал, пропорциональный абсолютному ускорению
геоцентрических координат аппарата, с выхода дифференциатора 29-4, на второй вход - сигнал, пропорциональный долготе λ местоположения аппарата с выхода датчика 35 долготы, на третий вход - сигнал, пропорциональный широте ϕ местоположения аппарата, с выхода датчика 14 широты, на четвертый вход - сигнал, пропорциональный курсу ψ аппарата, с выхода датчика 36 курса, на пятый вход - сигнал, пропорциональный тангажу ϑ аппарата, с выхода датчика 7 тангажа, на шестой вход - сигнал, пропорциональный крену γ аппараты, с выхода датчика 8 крена. Сигнал, пропорциональный абсолютному ускорению  геоцентрических координат аппарата, получается на выходе дифференциатора 29-4 после однократного дифференцирования в нем выходного сигнала датчика 39 скорости изменения геоцентрических координат. Сигнал с выхода блока 12-6 вычитания, пропорциональный приращению
геоцентрических координат аппарата, получается на выходе дифференциатора 29-4 после однократного дифференцирования в нем выходного сигнала датчика 39 скорости изменения геоцентрических координат. Сигнал с выхода блока 12-6 вычитания, пропорциональный приращению  абсолютного ускорения, поступает на первый вход блока 4 текущих координат центра масс. Одновременно с выхода датчика 9 угловых скоростей сигнал, пропорциональный абсолютной угловой скорости
абсолютного ускорения, поступает на первый вход блока 4 текущих координат центра масс. Одновременно с выхода датчика 9 угловых скоростей сигнал, пропорциональный абсолютной угловой скорости  аппарата, поступает на второй вход блока 4 текущих координат центра масс. В блоке 4 текущих координат центра масс определяется смещение
аппарата, поступает на второй вход блока 4 текущих координат центра масс. В блоке 4 текущих координат центра масс определяется смещение  центра масс по отношению к точке A, где расположен акселерометр 1 на аппарате.
центра масс по отношению к точке A, где расположен акселерометр 1 на аппарате.
Устройство для определения величины и направления смещения центра масс аппарата по п. 16 формулы (фиг. 14) работает следующим образом. Сигнал с выхода акселерометра 1, пропорциональный кажущемуся ускорению  , поступает на первый вход сумматора 2-1, на второй вход которого поступает сигнал, пропорциональный ускорению
, поступает на первый вход сумматора 2-1, на второй вход которого поступает сигнал, пропорциональный ускорению  силы тяжести, с выхода блока 6 определения составляющих ускорения силы тяжести. Последний формируется по сигналам датчика 5 ускорения силы тяжести, датчика 7 тангажа и датчика 8 крена, поступающим соответственно на первый, второй и третий входы блока 6 определения составляющих ускорения силы тяжести. После сложения сигналов, пропорциональных кажущемуся ускорению
силы тяжести, с выхода блока 6 определения составляющих ускорения силы тяжести. Последний формируется по сигналам датчика 5 ускорения силы тяжести, датчика 7 тангажа и датчика 8 крена, поступающим соответственно на первый, второй и третий входы блока 6 определения составляющих ускорения силы тяжести. После сложения сигналов, пропорциональных кажущемуся ускорению  и ускорению
и ускорению  силы тяжести, на выходе сумматора 2-1 получается сигнал, пропорциональный абсолютному линейному ускорению
силы тяжести, на выходе сумматора 2-1 получается сигнал, пропорциональный абсолютному линейному ускорению  аппарата. Он поступает на первый суммирующий вход блока 12-6 вычитания, где из него вычитается сигнал, пропорциональный абсолютному ускорению
аппарата. Он поступает на первый суммирующий вход блока 12-6 вычитания, где из него вычитается сигнал, пропорциональный абсолютному ускорению  центра масс аппарата, поступающий на второй вычитающий вход блока 12-6 вычитания. Сигнал, пропорциональный абсолютному ускорению
центра масс аппарата, поступающий на второй вычитающий вход блока 12-6 вычитания. Сигнал, пропорциональный абсолютному ускорению  центра масс аппарата, получается на выходе второго блока 41 определения составляющих абсолютного ускорения центра массе. При этом на его первый вход поступает сигнал, пропорциональный абсолютному ускорению
центра масс аппарата, получается на выходе второго блока 41 определения составляющих абсолютного ускорения центра массе. При этом на его первый вход поступает сигнал, пропорциональный абсолютному ускорению  , земных координат аппарата, с выхода блока 33 двойного дифференцирования, на второй вход - сигнал, пропорциональный курсу ψ аппарата, с выхода датчика 36 курса, на третий вход - сигнал, пропорциональный тангажу ϑ аппарата, с выхода датчика 7 тангажа, на четвертый вход - сигнал, пропорциональный крену γ аппарата, с выхода датчика 8 крена. Сигнал, пропорциональный абсолютному ускорению
, земных координат аппарата, с выхода блока 33 двойного дифференцирования, на второй вход - сигнал, пропорциональный курсу ψ аппарата, с выхода датчика 36 курса, на третий вход - сигнал, пропорциональный тангажу ϑ аппарата, с выхода датчика 7 тангажа, на четвертый вход - сигнал, пропорциональный крену γ аппарата, с выхода датчика 8 крена. Сигнал, пропорциональный абсолютному ускорению  земных координат аппарата, получается на выходе блока 33 двойного дифференцирования после двойного дифференцирования в нем выходного сигнала датчика 40 земных координат. Сигнал с выхода блока 12-6 вычитания, пропорциональный приращению
земных координат аппарата, получается на выходе блока 33 двойного дифференцирования после двойного дифференцирования в нем выходного сигнала датчика 40 земных координат. Сигнал с выхода блока 12-6 вычитания, пропорциональный приращению 
абсолюного ускорения, поступает на первый вход блока 4 текущих координат центра тяжести. Одновременно с выхода датчика 9 угловых скоростей сигнал, пропорциональный абсолютной угловой скорости  аппарата, поступает на второй вход блока 4 текущих координат центра масс. В блоке 4 текущих координат центра масс определяется смещение
аппарата, поступает на второй вход блока 4 текущих координат центра масс. В блоке 4 текущих координат центра масс определяется смещение  центра масс по отношению к точке A, где расположен акселерометр 1 на аппарате.
центра масс по отношению к точке A, где расположен акселерометр 1 на аппарате.
Второй блок 41 определения составляющих абсолютного ускорения центра масс по п. 17 формулы (фиг. 15) работает следующим образом. Сигнал с шины 42 абсолютного ускорения земных координат аппарата поступает на первый вход второго блока 41 определения составляющих абсолютного ускорения центра масс. Причем на первый вход его преобразователя 18-8 координат поступает сигнал, пропорциональный абсолютному ускорению  по горизонтальной оси направления движения земной системы координат, на второй и третий вход - сигналы, пропорциональные sin ψ и cos ψ , соответственно с синусного 19-8 и косинусного 20-8 функциональных преобразователей, на четвертый вход - сигнал, пропорциональный абсолютному ускорению
по горизонтальной оси направления движения земной системы координат, на второй и третий вход - сигналы, пропорциональные sin ψ и cos ψ , соответственно с синусного 19-8 и косинусного 20-8 функциональных преобразователей, на четвертый вход - сигнал, пропорциональный абсолютному ускорению  по оси местной вертикали земной системы координат, на пятый вход - сигнал, пропорциональный абсолютному ускорению
по оси местной вертикали земной системы координат, на пятый вход - сигнал, пропорциональный абсолютному ускорению  по горизонтальной оси, перпендикулярной оси направления движения земной системы координат. Выходной сигнал синусного 19-8 и косинусного 20-8 функциональных преобразователей, пропорциональный углу ψ курса аппарата, поступает со второго входа второго блока 41 определения составляющих абсолютного ускорения центра масс. На первый вход преобразователя 18-9 координат поступает сигнал с третьего выхода преобразователя 18-8 координат, на второй и третий вход - сигналы, пропорциональные sin ϑ и cos ϑ , соответственно с синусного 19-9 и косинусного 20-9 функциональных преобразователей, на четвертый вход - сигнал с первого выхода преобразователя 18-8 координат, на пятый вход - сигнал со второго выхода преобразователя 18-8 координат. Входной сигнал синусного 19-9 и косинусного 20-9 функциональных преобразователей, пропорциональный углу ϑ тангажа аппарата, поступает с третьего входа второго блока 41 определения составляющих абсолютного ускорения центра масс. На первый вход преобразователя 18-10 координат поступает сигнал с третьего выхода преобразователя 18-9 координат, на второй и третий вход - сигналы, пропорциональные sin γ и cos γ, соответственно с синусного 19-10 и косинусного 20-10 функциональных преобразователей, на четвертый вход - сигнал с первого выхода преобразователя 18-9 координат, на пятый вход - сигнал со второго выхода преобразователя 18-9 координат. Входной сигнал синусного 19-10 и косинусного 20-10 функциональных преобразователей, пропорциональный углу γ крена аппарата, поступает с четвертого входа второго блока 41 определения составляющих абсолютного ускорения центра масс, выход которого соединен с шиной 38 абсолютного ускорения центра масс аппарата так, что сигнал, пропорциональный нормальной составляющей абсолютного ускорения WYO центра масс аппарата, поступает с первого выхода преобразователя 18-10 координат, сигнал, пропорциональный поперечной составляющей абсолютного ускорения WZO центра масс аппарата, поступает со второго выхода преобразователя 18-10 координат, а сигнал, пропорциональный продольной составляющей абсолютного ускорения WXO центра масс аппарата, поступает с третьего выхода преобразователя 18-10 координат.
по горизонтальной оси, перпендикулярной оси направления движения земной системы координат. Выходной сигнал синусного 19-8 и косинусного 20-8 функциональных преобразователей, пропорциональный углу ψ курса аппарата, поступает со второго входа второго блока 41 определения составляющих абсолютного ускорения центра масс. На первый вход преобразователя 18-9 координат поступает сигнал с третьего выхода преобразователя 18-8 координат, на второй и третий вход - сигналы, пропорциональные sin ϑ и cos ϑ , соответственно с синусного 19-9 и косинусного 20-9 функциональных преобразователей, на четвертый вход - сигнал с первого выхода преобразователя 18-8 координат, на пятый вход - сигнал со второго выхода преобразователя 18-8 координат. Входной сигнал синусного 19-9 и косинусного 20-9 функциональных преобразователей, пропорциональный углу ϑ тангажа аппарата, поступает с третьего входа второго блока 41 определения составляющих абсолютного ускорения центра масс. На первый вход преобразователя 18-10 координат поступает сигнал с третьего выхода преобразователя 18-9 координат, на второй и третий вход - сигналы, пропорциональные sin γ и cos γ, соответственно с синусного 19-10 и косинусного 20-10 функциональных преобразователей, на четвертый вход - сигнал с первого выхода преобразователя 18-9 координат, на пятый вход - сигнал со второго выхода преобразователя 18-9 координат. Входной сигнал синусного 19-10 и косинусного 20-10 функциональных преобразователей, пропорциональный углу γ крена аппарата, поступает с четвертого входа второго блока 41 определения составляющих абсолютного ускорения центра масс, выход которого соединен с шиной 38 абсолютного ускорения центра масс аппарата так, что сигнал, пропорциональный нормальной составляющей абсолютного ускорения WYO центра масс аппарата, поступает с первого выхода преобразователя 18-10 координат, сигнал, пропорциональный поперечной составляющей абсолютного ускорения WZO центра масс аппарата, поступает со второго выхода преобразователя 18-10 координат, а сигнал, пропорциональный продольной составляющей абсолютного ускорения WXO центра масс аппарата, поступает с третьего выхода преобразователя 18-10 координат.
Устройство для определения величины и направления смещения центра масс аппарата по п. 18 формулы (фиг. 16) работает следующим образом. Сигнал с выхода акселерометра 1, пропорциональный кажущемуся ускорению  , поступает на первый вход сумматора 2-1, на второй вход которого поступает сигнал, пропорциональный ускорению
, поступает на первый вход сумматора 2-1, на второй вход которого поступает сигнал, пропорциональный ускорению  силы тяжести, с выхода блока 6 определения составляющих ускорения силы тяжести. Последний формируется по сигналам датчика 5 ускорения силы тяжести, датчика 7 тангажа и датчика 8 крена, поступающим соответственно на первый, второй и третий входы блока 6 определения составляющих ускорения силы тяжести. После сложения сигналов, пропорциональных кажущемуся ускорению
силы тяжести, с выхода блока 6 определения составляющих ускорения силы тяжести. Последний формируется по сигналам датчика 5 ускорения силы тяжести, датчика 7 тангажа и датчика 8 крена, поступающим соответственно на первый, второй и третий входы блока 6 определения составляющих ускорения силы тяжести. После сложения сигналов, пропорциональных кажущемуся ускорению  и ускорении
и ускорении  силы тяжести, на выходе сумматора 2-1 получается сигнал, пропорциональный абсолютному ускорению
силы тяжести, на выходе сумматора 2-1 получается сигнал, пропорциональный абсолютному ускорению  аппарата. Он поступает на первый суммирующий вход блока 12-6 вычитания, где из него вычитается сигнал, пропорциональный абсолютному ускорению
аппарата. Он поступает на первый суммирующий вход блока 12-6 вычитания, где из него вычитается сигнал, пропорциональный абсолютному ускорению  центра масс аппарата, поступающий на второй вычитающий вход блока 12-6 вычитания. Сигнал, пропорциональный абсолютному ускорению
центра масс аппарата, поступающий на второй вычитающий вход блока 12-6 вычитания. Сигнал, пропорциональный абсолютному ускорению  центра масс аппарата, получается на выходе второго блока 41 определения составляющих абсолютного ускорения центра масс. При этом на его первый вход поступает сигнал, пропорциональный абсолютному ускорению
центра масс аппарата, получается на выходе второго блока 41 определения составляющих абсолютного ускорения центра масс. При этом на его первый вход поступает сигнал, пропорциональный абсолютному ускорению  земных координат аппарата, с выхода дифференциатора 29-4, на второй вход - сигнал, пропорциональный курсу ψ аппарата, с выхода датчика 36 курса, на третий вход - сигнал, пропорциональный тангажу ϑ аппарата, с выхода датчика 7 тангажа, на четвертый вход - сигнал, пропорциональный крену γ аппарата, с выхода датчика 8 крена. Сигнал, пропорциональный абсолютному ускорению
земных координат аппарата, с выхода дифференциатора 29-4, на второй вход - сигнал, пропорциональный курсу ψ аппарата, с выхода датчика 36 курса, на третий вход - сигнал, пропорциональный тангажу ϑ аппарата, с выхода датчика 7 тангажа, на четвертый вход - сигнал, пропорциональный крену γ аппарата, с выхода датчика 8 крена. Сигнал, пропорциональный абсолютному ускорению  земных координат аппарата, получается на выходе дифференциатора 29-4 после дифференцирования в нем выходного сигнала датчика 43 скорости изменения земных координат. Сигнал с выхода блока 12-6 вычитания, пропорциональный приращению
земных координат аппарата, получается на выходе дифференциатора 29-4 после дифференцирования в нем выходного сигнала датчика 43 скорости изменения земных координат. Сигнал с выхода блока 12-6 вычитания, пропорциональный приращению  абсолютного ускорения, поступает на первый вход блока 4 текущих координат центра масс. Одновременно с выхода датчика 9 угловых скоростей сигнал, пропорциональный абсолютной угловой скорости
абсолютного ускорения, поступает на первый вход блока 4 текущих координат центра масс. Одновременно с выхода датчика 9 угловых скоростей сигнал, пропорциональный абсолютной угловой скорости  аппарата, поступает на второй вход блока 4 текущих координат центра масс. В блоке 4 текущих координат центра масс определяется смещение
аппарата, поступает на второй вход блока 4 текущих координат центра масс. В блоке 4 текущих координат центра масс определяется смещение  центра масс по отношению к точке A, где расположен акселерометр 1 на аппарате.
центра масс по отношению к точке A, где расположен акселерометр 1 на аппарате.
Устройство для определения величины и направления смещения центра масс аппарата по п. 19 формулы (фиг. 17) работает следующим образом. Сигнал с выхода акселерометра 1, пропорциональный кажущемуся ускорению  , поступает на первый вход сумматора 2-1, на второй вход которого поступает сигнал, пропорциональный ускорению
, поступает на первый вход сумматора 2-1, на второй вход которого поступает сигнал, пропорциональный ускорению  силы тяжести, с выхода блока 6 определения составляющих ускорения силы тяжести. Последний формируется по сигналам датчика 5 ускорения силы тяжести, датчика 7 тангажа и датчика 8 крена, поступающим соответственно на первый, второй и третий входы блока 6 определения составляющих ускорения силы тяжести. После сложения сигналов, пропорциональных кажущемуся ускорению
силы тяжести, с выхода блока 6 определения составляющих ускорения силы тяжести. Последний формируется по сигналам датчика 5 ускорения силы тяжести, датчика 7 тангажа и датчика 8 крена, поступающим соответственно на первый, второй и третий входы блока 6 определения составляющих ускорения силы тяжести. После сложения сигналов, пропорциональных кажущемуся ускорению  и ускорению
и ускорению  силы тяжести, на выходе сумматора 2-1 получается сигнал, пропорциональный абсолютному линейному ускорению
силы тяжести, на выходе сумматора 2-1 получается сигнал, пропорциональный абсолютному линейному ускорению  аппарата. Он поступает на первый суммирующий вход блока 12-6 вычитания, где из него вычитается сигнал, пропорциональный абсолютному ускорению
аппарата. Он поступает на первый суммирующий вход блока 12-6 вычитания, где из него вычитается сигнал, пропорциональный абсолютному ускорению  центра масс аппарата, поступающий на второй вычитающий вход блока 12-6 вычитания. Сигнал, пропорциональный абсолютному ускорению
центра масс аппарата, поступающий на второй вычитающий вход блока 12-6 вычитания. Сигнал, пропорциональный абсолютному ускорению  центра масс аппарата, получается на выходе третьего блока 45 определения составляющих абсолютного ускорения центра масс. При этом на его первый вход поступает сигнал, пропорциональный скорости
центра масс аппарата, получается на выходе третьего блока 45 определения составляющих абсолютного ускорения центра масс. При этом на его первый вход поступает сигнал, пропорциональный скорости  аппарата в его связанных осях, с выхода датчика 44 скорости аппарата, а на второй вход - сигнал, пропорциональный абсолютной угловой скорости
аппарата в его связанных осях, с выхода датчика 44 скорости аппарата, а на второй вход - сигнал, пропорциональный абсолютной угловой скорости  аппарата, с датчика 9 угловых скоростей. Сигнал с выхода блока 12-6 вычитания, пропорциональный приращению
аппарата, с датчика 9 угловых скоростей. Сигнал с выхода блока 12-6 вычитания, пропорциональный приращению  абсолютного ускорения, поступает на первый вход блока 4 текущих координат центра масс. Одновременно с выхода датчика 9 угловых скоростей сигнал, пропорциональный абсолютной угловой скорости
абсолютного ускорения, поступает на первый вход блока 4 текущих координат центра масс. Одновременно с выхода датчика 9 угловых скоростей сигнал, пропорциональный абсолютной угловой скорости  аппарата, поступает на второй вход блока 4 текущих координат центра масс. В блоке 4 текущих координат центра масс определяется смещение
аппарата, поступает на второй вход блока 4 текущих координат центра масс. В блоке 4 текущих координат центра масс определяется смещение  центра масс по отношению к точке A, где расположен акселерометр 1 на аппарате.
центра масс по отношению к точке A, где расположен акселерометр 1 на аппарате.
Третий блок 45 определения составляющих абсолютного ускорения центра масс по п. 20 формулы (фиг. 18) работает следующим образом. Сигнал, пропорциональный скорости  аппарата в его связанных осях, по шине 46 скорости аппарата поступает на первый вход третьего блока 45 определения составляющих абсолютного ускорения центра масс, на второй вход которого по шине 47 абсолютной угловой скорости аппарата также поступает сигнал, пропорциональный абсолютной угловой скорости
аппарата в его связанных осях, по шине 46 скорости аппарата поступает на первый вход третьего блока 45 определения составляющих абсолютного ускорения центра масс, на второй вход которого по шине 47 абсолютной угловой скорости аппарата также поступает сигнал, пропорциональный абсолютной угловой скорости  аппарата, а с выхода по шине 38 абсолютного ускорения центра масс аппарата снимается сигнал, пропорциональный абсолютному ускорению
аппарата, а с выхода по шине 38 абсолютного ускорения центра масс аппарата снимается сигнал, пропорциональный абсолютному ускорению  центра масс. При этом сигнал, пропорциональный скорости Vx аппарата по продольной оси связанной системы координат, поступает на первые входы дифференциатора 29-5 и умножителей 22-26, 22-27. Сигнал, пропорциональный скорости Vy аппарата по нормальной оси связанной системы координат, поступает на первые входы дифференциатора 29-6 и умножителей 22-28, 22-29. Сигнал, пропорциональный скорости Vz аппарата по поперечной оси связанной системы координат, поступает на первые входы дифференциатора 29-7 и умножителей 22-30, 22-31. На вторые входы умножителей 22-26 и 22-28 поступает сигнал, пропорциональный угловой скорости ωz по поперечной оси связанной системы координат. На вторые входы умножителей 22-27 и 22-31 поступает сигнал, пропорциональный угловой скорости ωy по нормальной оси связанной системы координат. На вторые входы умножителей 22-29 и 22-30 поступает сигнал, пропорциональный угловой скорости ωx по продольной оси связанной системы координат. На первый суммирующий вход сумматора 2-20 поступает сигнал с выхода дифференциатора 29-5, на второй вычитающий вход - с выхода умножителя 22-28, на третий суммирующий вход - с выхода умножителя 22-31, а с выхода снимается сигнал, пропорциональный продольной составляющей абсолютного ускорения WXO центра масс аппарата, на шину 38 абсолютного ускорения центра масс аппарата На первый суммирующий вход сумматора 2-21 поступает сигнал с выхода дифференциатора 29-6, на второй вычитающий вход - с выхода умножителя 22-30, на третий суммирующий вход - с выхода умножителя 22-26, а с выхода снимается сигнал, пропорциональный нормальной составляющей абсолютного ускорения WYO центра масс аппарата, на шину 38 абсолютного ускорения центра масс аппарата. На первый суммирующий вход сумматора 2-22 поступает сигнал с выхода дифференциатора 29 - 7, на второй вычитающий вход - с выхода умножителя 22-27, на третий суммирующий вход - с выхода умножителя 22-29, а с выхода снимается сигнал, пропорциональный поперечной составляющей абсолютного ускорения WZO центра масс аппарата, на шину 38 абсолютного ускорения центра масс аппарата.
центра масс. При этом сигнал, пропорциональный скорости Vx аппарата по продольной оси связанной системы координат, поступает на первые входы дифференциатора 29-5 и умножителей 22-26, 22-27. Сигнал, пропорциональный скорости Vy аппарата по нормальной оси связанной системы координат, поступает на первые входы дифференциатора 29-6 и умножителей 22-28, 22-29. Сигнал, пропорциональный скорости Vz аппарата по поперечной оси связанной системы координат, поступает на первые входы дифференциатора 29-7 и умножителей 22-30, 22-31. На вторые входы умножителей 22-26 и 22-28 поступает сигнал, пропорциональный угловой скорости ωz по поперечной оси связанной системы координат. На вторые входы умножителей 22-27 и 22-31 поступает сигнал, пропорциональный угловой скорости ωy по нормальной оси связанной системы координат. На вторые входы умножителей 22-29 и 22-30 поступает сигнал, пропорциональный угловой скорости ωx по продольной оси связанной системы координат. На первый суммирующий вход сумматора 2-20 поступает сигнал с выхода дифференциатора 29-5, на второй вычитающий вход - с выхода умножителя 22-28, на третий суммирующий вход - с выхода умножителя 22-31, а с выхода снимается сигнал, пропорциональный продольной составляющей абсолютного ускорения WXO центра масс аппарата, на шину 38 абсолютного ускорения центра масс аппарата На первый суммирующий вход сумматора 2-21 поступает сигнал с выхода дифференциатора 29-6, на второй вычитающий вход - с выхода умножителя 22-30, на третий суммирующий вход - с выхода умножителя 22-26, а с выхода снимается сигнал, пропорциональный нормальной составляющей абсолютного ускорения WYO центра масс аппарата, на шину 38 абсолютного ускорения центра масс аппарата. На первый суммирующий вход сумматора 2-22 поступает сигнал с выхода дифференциатора 29 - 7, на второй вычитающий вход - с выхода умножителя 22-27, на третий суммирующий вход - с выхода умножителя 22-29, а с выхода снимается сигнал, пропорциональный поперечной составляющей абсолютного ускорения WZO центра масс аппарата, на шину 38 абсолютного ускорения центра масс аппарата.
Практическая реализация способа и устройства для определения величины и направления смещения центра масс аппарата возможна на аналоговой и цифровой схемотехнической базе. При этом следует учесть, что датчики ускорения - акселерометр 1, тангажа 7, крена 8, курса 36, ускорения силы тяжести 5, угловых скоростей 9, цифровая вычислительная машина - для реализации вычислений сумматора 2-1, первого и второго частотных селекторов 3-1, 3-2, блоков 4 текущих координат центра масс и блока 6 определения составляющих ускорения силы тяжести, входят в состав серийно выпускаемых инерциальных навигационных систем И-11, И-21, БИНС-85, И-42 и др. [ 32, с. 77, 33, с. 63]. Для высокоточных измерений предпочтительны геодезические и гравиметрические системы типа ГНС, ГИНС-3 [34, 35]. Реализация возможна и с применением отдельных измерителей: ускорения - акселерометров А-15 или А-Л2 [32. с. 131]; датчиков угловых скоростей ДУС-500, ДУС-700 [32, с. 127]. Датчик 14 широты и датчик 35 долготы входят в состав инерциальных навигационных систем. Баро- или радиовысотомер аппарата являются датчиком 16 высоты. Датчики тангажа 7, крена 8, курса 36 могут использовать бортовые гироприборы типа ИКВ, ТКС, БСКВ [33, с. 42-53; 32, с. 119]. Вычислительные операции для датчика 5 ускорения силы тяжести, блока 6 определения составляющих ускорения силы тяжести, сумматора 2-1, частотных селекторов 3-1, 3-2, блока 4 текущих координат центра масс, блоков 12-1 - 12-6 вычитания, первого 34, второго 41, третьего 45 блоков определения составляющих абсолютного ускорения центра масс реализуются и в БЦВМ авиационного типа ЦВМ 20, ЦВМ 80, ЦВМ 90 [32, с. 337-343]. Вариант реализации устройства на борту аппарата зависит от его летных характеристик и приборного состава. Предпочтительно использование информации датчиков и систем, входящих его цифровой пилотажно-навигационный комплекс, например ЦНПК-114 (самолет ИЛ-114), где есть бесплатформенная система курса и вертикали СБКВ-85, система воздушных сигналов СВС-85, радиотехническая система ближней навигации и посадки РСБН А-331-05, радиотехническая система спутниковой навигации СНС-85-01 (ГЛОНАСС), доплеровский измеритель скорости и угла сноса ДИСС-МВЛ (П-11), радиовысотомер РВ-85, прецизионный радиодальномер DME / Р-85; ЦВМ ВСС-85 МВЛ-1. Аналогично можно использовать комплекс КСЦПНО (самолетов ИЛ-96, ТУ-204) [32, с. 63 - 66]. Все датчики, системы, вычислители этих комплексов обеспечивают получение всей исходной информации для реализации вариантов предлагаемого способа и устройства. В качестве датчика 32 геоцетрических координат и датчика 39 скорости изменения геоцентрических координат предлагается использовать радиотехнические системы спутниковой навигации (СНС) GPS / ГЛОНАСС типа СН-3301, А-737, А-744, [32, с. 181-185] . Датчиком 40 земных координат и датчиком 43 скорости изменения земных координат могут быть радиотехнические системы ближней навигации и посадки (РСБН) А-312-09, А-324 [32, с. 171-179], а также лазерные локационные системы [26, с. 129, 135; 17, с. 183], предпочтительные для измерений в условиях прямой видимости аппарата. Датчик 44 скорости аппарата, определяющий скорости в связанной системе координат, предпочтительно реализуется на доплеровских устройствах типа А-078, П-11, ШО-13 [32, с. 244-246, 29; 30]. В качестве специализированного бортового вычислителя возможно применение микропроцессорной системы с устройствами ввода-вывода серии MD [32, с. 355-357] и сверхминиатюрных одноплатных бортовых машин СБ-3580, СБ-5580, Кредо-486 [32, с. 344-346; 36, с. 86, 140-143, 183]. Для морских аппаратов возможно применение датчиков и систем повышенной точности морского исполнения [37, с. 18, 28, 176; 38].
Заявляемый способ и устройство обладают высокой достоверностью определения реального смещения центра масс аппарата из-за всех возможных причин его возникновения в полете. Этим они кардинально отличаются от известных средств решения технической задачи, носящих, как правило, косвенный, предсказательный характер. Так в способе, выбранном в качестве прототипа, необходимо реализовать сложные манипуляции с громоздким самолетом на Земле, заранее предполагая все места и положения его грузов. Аналогично оценивается влияние на смещение центра масс топлива в баках самолета. Считается, что топливо, как и грузы, известным образом распределены на самолете, а топливоизмерительная и распределительная система надежна и выдает точную информацию летчику. Полетная практика показывает ограниченность таких оценок центровки и их отрицательные последствия на безопасность полетов [1; 2; 39, с. 163-165; 40, c. 34, 41, с. 7 и др.]. Перспективные летательные аппараты и авиационно-космические системы АН-124, АН-225, ASX-500-100, ASX-600-400, М-90. Воздушный паром Боинг TSTO, АН-124-100 ВС Полет [42; 43; 44; 45] имеют значительные перемещаемые на фюзеляже нагрузки, учесть влияние которых на положение центра масс аппарата в полете сложно как в штатных, так и в нештатных ситуациях. Предлагаемые способ и устройство позволяют повысить безопасность таких систем путем учета реального положения центра масс по всем весовым нагрузкам аппарата и при любой их конфигурации. Они дополняют наземное устройство - прототип [9, с. 77; 10, c. 108] с датчиками нагрузки стоек шасси в статическом положении самолета на Земле, обеспечивая полетный контроль центровки. Для транспортных летательных аппаратов способ и устройство позволяют точно определять текущую центровку при сбрасывании грузов, повреждениях конструкции, изменении геометрии крыла, заправке топливом в полете и нештатных ситуациях, в том числе повреждениях топлевоизмерительной системы, топливных баков, и своевременно принимать адекватные меры по управлению аппаратом. Точность оценки смещения центра масс менее 0,1 м. Измерение смещения центра масс в полете позволяет повысить топливную экономичность аппарата за счет более точного управления задней центровкой и снижения лобового сопротивления аэродинамически неустойчивого аппарата. При этом сигнал о положении центра масс используется для управления насосами перекачки топлива по продольной оси фюзеляжа. С помощью предлагаемого устройства возможно создание систем управления летательными аппаратами с активным управлением положением центром масс, что расширяет диапазон управления угловым положением не только с помощью традиционного отклонения аэродинамических управляющих поверхностей и перестановки стабилизатора. Применение способа и устройства для грузовых судов и контейнеровозов позволяет контролировать их остойчивость в процессе плавания, что имеет большое значение при волнении моря и возможном смещении груза. Текущий контроль остойчивости при погрузке судов у причала обеспечивает достоверную, а не декларирующую информацию о допустимой нагрузке и ее распределении на судне. Как и для летательных аппаратов открывается возможность оптимального управления остойчивостью судна путем закачки конкретных балластных емкостей для обеспечения приемлемой устойчивости движения судна при высокой экономичности работы двигательной установки по преодолению лобового сопротивления погруженной в воду части корпуса судна.
Таким образом, приведенные сведения показывают, что при осуществлении заявленной труппы изобретений выполняются следующие условия:
- средства, воплощающие изобретения при их осуществлении, предназначены для использования в промышленности, а именно в комплексных системах контроля и управления подвижными аппаратами;
- для заявленных изобретений в том виде, как они охарактеризованы в независимых пунктах формулы изобретения, подтверждена возможность их осуществления с помощью описанных или других известных до даты подачи заявки средств и методов;
- средства, воплощающие изобретения при их осуществлении, способны обеспечить получение сказанного технического результата. Следовательно, заявленные изобретения соответствуют условию патентоспособности "промышленная применимость".
Источники информации
1. Информационный бюллетень о состоянии безопасности полетов гражданских воздушных судов в августе 1996 г. - М.: Межгосударственный авиац. комитет // Комиссия по расследованию авиац. происшествий на воздушном транспорте, 1996 г. , с. 25.
2. Погосян Н. Экономический барьер авиакатострофам. Экономика и жизнь, N 52, 1996 г.
3. Торенбик Э. Проектирование дозвуковых самолетов. - М.: Машиностроение, 1983 г. 331.
4. Бутенин Н.Б., Лунц Я.Л., Меркин Д.Р. Курс теоретической механики. Т. 1. - М.: Наука, 1976 г., с. 137.
5. Литум Т.И. Аэродинамика и динамика полета турбореактивных самолетов. - М.: Транспорт, 1972 г., с. 231.
6. Бехтир В. П. Практическая аэродинамика самолета ЯК-42. - М.: Транспорт, 1989 г., с. 111.
7. Бородин В.Т., Рыльский Г.Я. Пилотные комплексы и системы управления самолетов и вертолетов. - М.: Машиностроение, 1978 г., с. 216.
8. Алтухов В.Ю. Стадник В.В. Гироскопические приборы, автоматические бортовые системы управления самолетов и их техническая реализация. - М.: Машиностроение, 1991 г., с. 160.
9. Пашковский И.М., Леонов В.А. Поплавский Б.К. Летные испытания самолетов и обработка результатов испытаний: Учеб. пособие. - М.: Машиностроение, 1985 г., с. 77.
10. Зайцева Н. Н. Пассажирский самолет ЭРБАС ИНДАСТРИ A310, М.: ЦАГИ, 1990 г., с. 115.
11. Березкин Е.Н. Курс теоретической механики. - М.: Изд. МГУ, 1974 г., с. 646.
12. Боднер В.А. Системы управления летательными аппаратами. - М.: Машиностроение. 1973 г., с. 506.
13. Ишлинский А.Ю. Механика относительного движения и силы инерции. - М. : Наука, 1981 г.
14. Рябыкин С.Л., Загавура Ф.Я. Средства измерения параметров движения. - Киев, Виша школа, 1987 г., с. 74-75.
15. Физический энциклопедический словарь. - М.: Советская энциклопедия, 1984 г., с. 791.
16. Рудис В. И. Полуавтоматическое управление самолетом. - М.: Машиностроение, 1978 г., с. 106.
17. Бортовые устройства спутниковой радионавигации // И.В. Кудрявцев, И. Н. Мищенко, А.И. Волынкин и др. Под ред. В.С. Щебшаевича. - М.: Транспорт, 1988 г.
18. Глобальная спутниковая радионавигационная система ГЛОНАСС // Под ред. В.Н. Харисова, А.И. Перова, В.А. Болдина. - М.: ИПРЖР, 1998 г., с. 111.
19. Система цифрового управления самолетом / А.Д. Александров, В.П. Андреев, В.М. Кейн и др. Под ред. А.Д. Александрова, С.М. Федорова. - М.: Машиностроение, 1983 г., с. 6-15.
20. Селезнев В.П. Навигационные устройства. - М.: Машиностроение, 1974 г.
21. Векуа Н. П. Некоторые вопросы теории дифференциальных уравнений и приложения в механике. - М.: Наука, 1991 г., с. 106-108.
22. Сетевые спутниковые радионавигационные системы / В.С. Шебшаевич, П. П. Дмитриев, Н.В. Иванцевич и др. Под ред. П.П. Дмитриева и В.С. Шебшаевича. - М.: Радио и связь, 1982 г., с. 198.
23. Микеладзе В. Г. , Титов В.М. Основные геометрические и аэродинамические характеристики самолетов и ракет. Справочник. - М.: Машиностроение, 1990 г., с. 90.
24. Лебедев А.Н. Моделирование в научно-технических исследованиях. - М.: Радио и связь. 1989 г., с. 223.
25. Бесекерский В.А., Изранцев В.В. Системы автоматического управления с микро-ЭВМ. - М.: Наука, 1987 г., с. 234.
26. Малашин М.С., Каминский Р.П., Борисов Ю.Б. Основы проектирования лазерных локационных систем. - М.: Высшая школа, 1983 г.
27. Зуев В.Е., Фадеев В.Я. Лазерные навигационные устройства. - М.: Радио и связь 1987 г., с. 160.
28. Лазерные измерительные системы / Под ред. Д.П. Лукьянова - М.: Радио и связь, 1981 г., с. 451.
29. Авиационная радионавигация. Справочник / Под ред. А.А. Сосновского. - М.: Транспорт, 1990 г., с. 264.
30. Флеров А.Г., Тимофеев В.Т. Доплеровскне устройства и системы навигации. - М.: Транспорт, 1987 г., с. 191.
31. Олянюк П.В., Астафьев Г.П., Грачев В.В. Радионавигационные устройства и системы гражданской авиации. - М.: Транспорт, 1983 г., с. 320.
32. Авионика России. Энциклопедический справочник. / Под общ. ред. С.Д. Бодрунова. СПб.: Национальная Ассоциация авиаприборостроителей, 1999 г., с. 780.
33. Автоматизированное управление полетом воздушных судов / С.М. Федоров, В. М. Клейн, О.И. Михайлов, Н.Н. Сухих. Под ред. С. М. Федорова. - М.: Транспорт, 1992 г., с. 264.
34. Геодезическая навигационная система ГНС. Проспект фирмы АВИАПРИБОР, МАКС-95.
35. Гравиизмерительная навигационная система ГИНС - 3. Проспект фирмы АВИАПРИБОР, МАКС-95.
36. Цифровые процессоры обработки сигналов. Справочник / А.Г. Остапенко, С. И. Лавлинский, А.Б. Сушков и др. Под ред. А.Г. Остапенко. - М.: Радио и связь, 1994.
37. Инерциальные навигационные системы морских объектов / Д.П. Лукьянов, А. В. Мочалов, А.А. Одинцов, И.Б. Вайсгант. - Л.: Судостроение, 1989 г., с. 184.
38. Киреев К.Н., Кутепов B.C., Пущина Л.В., Тулин В.А., Черемисинов Г.В. Стабилизация морского гравиметра. - М.: Наука, 1978 г., с. 79.
39. Орлов Б.А. Записки летчика-испытателя. - М.: Авико пресс, 1994 г.
40. Бочкарев А.М., Струков Ю.П. Бортовое радиоэлектронное оборудование летательных аппаратов. // Итоги науки и техники. ВИНИТИ, Сер. Авиастроение, 1990.
41. Джефри Леноровиц и Б. Рыбак. Выгода превыше безопасности. Aviation Week and Space Technology, лето 1994 г.
42. Авиация и космонавтика. Вып. 5, 1995 г., Т.И. Техническая Информация ЦАГИ. Вып. 1, 1995 г. Малая энциклопедия отечественных летательных аппаратов.
43. Лозино-Лозинский Г. В космос на крыльях. - Самолет, весна, 1992 г.
44. Пьер Спарако. Сверхтяжелый ЭРБАС. Aviation Week and Space Technology, лето, 1994, с. 30.
45. Сафронов И. Энергия на Воздушном Старте. Коммерсант, N 150, 21.08.1999.


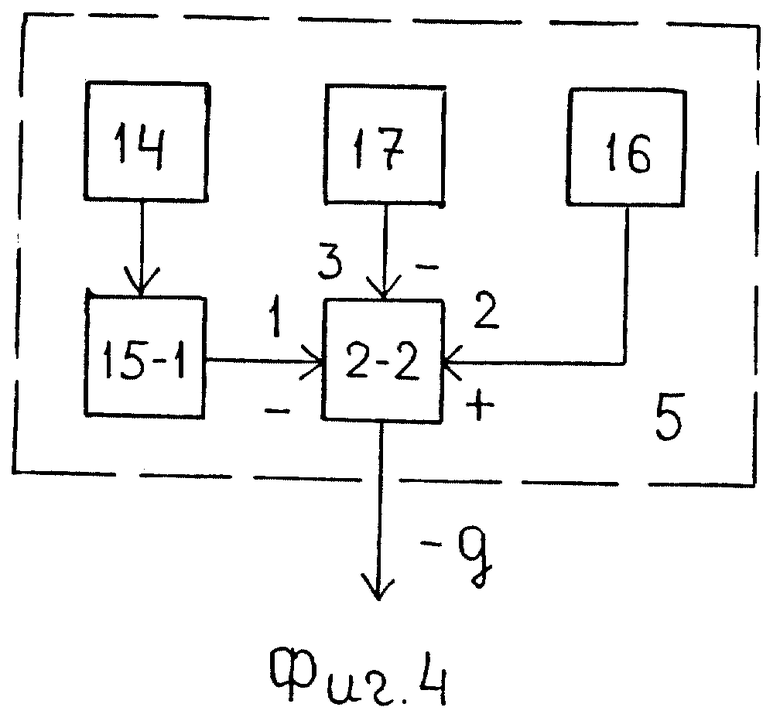
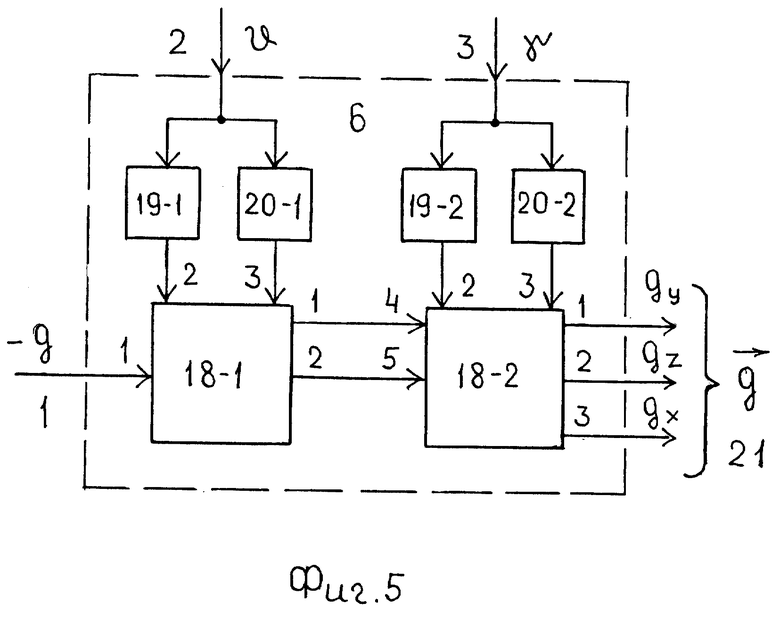












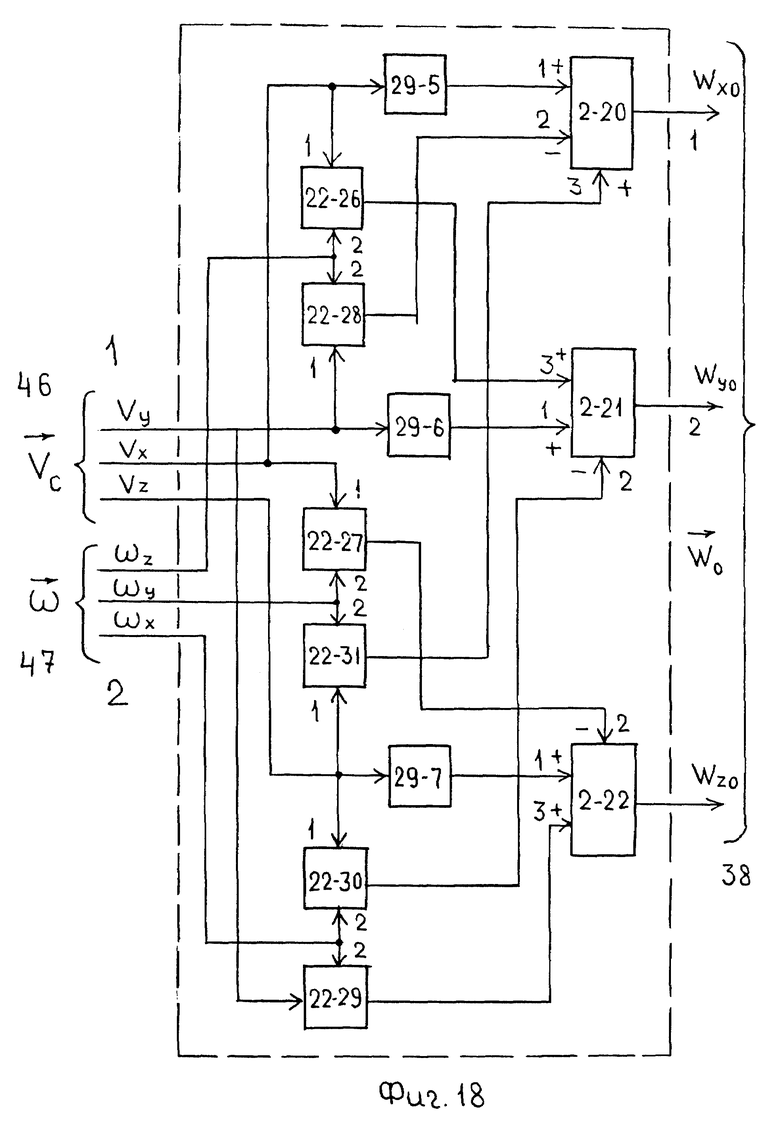
Изобретение относится к комплексному контролю систем управления подвижных аппаратов и обеспечению устойчивости их движения в условиях действия на аппарат внешних и внутренних возмущающих воздействий. Технический результат заключается в повышении маневренности аппарата и обеспечении безопасности полета. Технический результат достигается за счет того, что изобретение позволяет определять в полете величину и направление смещения центра масс, возникшего из-за нарушения правил его загрузки, самопроизвольного перемещения груза, отказов топливной системы и несимметрии выработки топлива из баков, а также адекватно управлять отклонением рулей для компенсации влияния этого смещения. Сущность способа и устройства состоит в определении полетной взаимосвязи приращения абсолютного линейного ускорения аппарата в его произвольной точке по отношению к ускорению его центра масс с величиной и направлением смещения этой точки от центра масс в процессе движения. Реализация изобретения возможна с помощью акселерометра, гравиметра, датчика угловых скоростей, сумматора, двух частотных селекторов и блока текущих координат центра масс, соединенных между собой. 7 с. и 13 з.п. ф-лы, 18 ил.
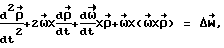
где ρ - величина смещения центра масс аппарата, м;
ω - величина угловой скорости аппарата относительно его центра масс, 1/с;
ΔW - величина приращения абсолютного линейного ускорения аппарата по отношению к абсолютному линейному ускорению аппарата в его центре масс, м/с2;
t - время, с.
g = 9,78049(1 + 5,288 • 10-3sin2ϕ) - 3,086 • 10-6Н,
где g - величина ускорения силы тяжести в точке местоположения аппарата, м/с2;
ϕ - широта местоположения аппарата, угл.град.;
Н - высота местоположения аппарата над поверхностью Земли, м,
величину и направление приращения абсолютного линейного ускорения аппарата по отношению к абсолютному линейному ускорению аппарата в его центре масс, угловой скорости и углового ускорения аппарата относительно его центра масс определяют узкополосно, фильтруя на частоте собственных периодических составляющих угловых колебаний аппарата относительно его центра масс сигналы, пропорциональные соответственно абсолютному линейному ускорению аппарата, абсолютной угловой скорости и абсолютному угловому ускорению аппарата.
| ПАШКОВСКИЙ И.М | |||
| и др | |||
| Летные испытания самолетов и обработка результатов испытаний | |||
| Учебное пособие | |||
| - М.: Машиностроение, 1985, с.77 | |||
| RU 94006461 A1, 10.10.1995 | |||
| US 5351913 А, 04.10.1994 | |||
| US 4569493 А, 11.02.1986 | |||
| ТОРЕНБИК Э | |||
| Проектирование дозвуковых самолетов | |||
| - М.: Машиностроение, 1983, с.331 | |||
| БОРОДИН В.Т | |||
| и др | |||
| Пилотажные комплексы и системы управления самолетов и вертолетов | |||
| - М.: Машиностроение, 1978, с.9-15 , 84. |

