Изобретение относится к области авиационной техники и может быть использовано для комплексного контроля систем управления пассажирских и транспортных самолетов классической схемы, у которых топливо расположено в крыле, а нагрузка - в фюзеляже, Оно может быть использовано также для определения в полете текущего значения веса коммерческой нагрузки и оперативного управления основными аэродинамическими характеристиками самолета: дальностью, высотой, скоростью полета.
Известно устройство предполетного контроля веса и центровки самолета с помощью весов, измерителя расстояний местоположения грузов, чертежа конструкции самолета, измерителя веса топлива, пустого (снаряженного) самолета, суммирующего устройства и центровочных графиков [1, с.233]. Для конкретного типа самолета с помощью весов определяется вес каждой составляющей нагрузки, вес топлива, экипажа, пассажиров, их багажа. Вес нагрузки определяется в суммирующем устройстве по данным измерений на весах и информации о среднестатистическом весе составляющих нагрузки (количестве членов экипажа, пассажиров в салонах самолета). Центровочные графики включают сведения о загрузке самолета, количестве пассажиров и их размещении, багаже, составе экипажа, заправках топливом и жидкостями и пр. Процесс определения веса по этим графикам формализован и избавлен от арифметических ошибок суммирования диспетчером или бортинженером. Однако приближенность, субъективность оценок и длительность оформления графиков, которые содержат около ста заполняемых строк, делают их малопригодными для современных самолетов. Известно усовершенствование этой формальной предполетной процедуры контроля веса с помощью системы автоматизированных расчетов "Центровка", разработанной ЦНИИ АСУ ГА. Система имеет нормативно-справочную базу в ПЭВМ по всем типам самолетов и с помощью диспетчера центровки и тахже взвешиваний на весах элементов нагрузки она проводит документооборот подобно тому, как это делалось по листам центровочных графиков. Основной недостаток устройства и его модификаций - недостоверность оценки веса, длительность его предполетного определения, низкая достоверность контроля веса экипажем, невозможность определения изменений и текущего веса в полете самолета.
Известно устройство полетного и предполетного контроля и ограничения веса нагрузки с помощью конструктивного элемента грузовой кабины - клетки для размещения груза [2]. Клетка ограничивает объем перевозимого груза, защищает конструкцию и системы фюзеляжа от повреждения грузом, ограничивает его смещение в соответствии с требованиями проектанта самолета. Предполагается, что устройство способно недопускать перегруз самолета. Однако вес нагрузки здесь не определяется вообще. Устройство имеет весьма ограниченное применение и не способно контролировать перегруз самолета для любой номенклатуры нагрузки, кроме объемных грузов с известной весовой плотностью. Полетный контроль истинной нагрузки самолета невозможен.
Известны устройства для контроля веса и центровки самолета с помощью специальных платформенных весов [3, с.166]. Весы стационарно установлены в ангаре и содержат две, три платформы для расположения стоек шасси самолета. Взвешивание проводится с выключенной двигательной установкой самолета и занимает длительное время с учетом всех подготовительных наземных операций. Предварительно определяется вес снаряженного самолета и взвешивание его на весах в предстартовом состоянии, по разности определяют вес нагрузки. Аналогичное устройство имеет и мобильный комплекс измерения веса и центровки VAK30-250 [4], включающий несколько переностных весоизмерительных платформ, на которые закатывается самолет в процессе измерения его веса. Устройство обладает неоходимой точностью определения веса самолета, но имеет высокую стоимость, габариты, длительность и трудоемкость контроля. Оно неавтономно и зависит от работы аэродромных служб. Контроль изменяющегося полетного веса нагрузки невозможен.
Известно бортовое устройство для контроля веса и центровки самолета, содержащее акселерометры - измерители изгиба, попарно расположенные на горизонтальных силовых элементах - полуосях шасси самолета [5]. Кроме двух горизонтальных акселерометров в систему, на каждой стойке шасси, входят и вертикальные акселерометры, расположенные в фюзеляже. Устройство определяет предстартовый вес путем суммирования сигналов парных акселерометров - измерителей угловых деформаций осей на всех стойках шасси. Вертикальные акселерометры определяют отклонение самолета от горизонтальной плоскости в процессе определения его веса. Компенсационные сигналы вертикальных акселерометров устраняют ошибки измерения из-за наклона самолета в предстартовом положении. Устройство содержит высокоточные дорогие акселерометры инерциального типа, их надежная работа на осях шасси в условиях ударов, вибраций, попадания загрязнений и влаги проблематична. Определение именно веса нагрузки возможно только на основе предварительной оценки веса снаряженного самолета при его неподвижном положении. Устройство требует для своей работы постоянной калибровки измерителей. Текущее полетное значение нагрузки устройство не контролирует.
Известно бортовое устройство для контроля веса и центровки самолета, содержащее индукционные датчики-измерители сдвиговых деформаций, расположенные попарно на горизонтальных силовых элементах - полуосях или балках тележек шасси [6]. Сдвиговые деформации, измеренные датчиками на всех стойках (балках) шасси, независимо от изгибающих моментов, адекватно отражают именно действие веса самолета. Устройство обладает повышенной помехозащищенностью, содержит более дешевые и надежные датчики. Оно автономно в работе, но также требует неподвижности самолета в процессе предстартового контроля веса, сложных полетных и предполетных калибровок, которые включают сигналы дополнительных прецизионных индукционных датчиков - измерителей сдвиговых деформаций. Устройство не способно определять вес нагрузки в полете, а значит не может применятся для оперативного управления его аэродинамическими характеристиками, например при многократном приеме и десантировании груза.
Наиболее близким из числа известных технических решений является устройство для определения величины и направления смещения центра масс аппарата [7], которое содержит датчик скорости тангажа, датчик скорости крена, датчик скорости рыскания, датчики углов крена, тангажа, три акселерометра, сумматор, два частотных селектора, средство измерения ускорения силы тяжести, функциональный преобразователь, блок текущих координат центра масс, сумматор устройства первым входом соединен через дифференциатор с датчиком скорости тангажа, вторым входом - с выходом умножителя, входы которого соединены с датчиком скорости крена и датчиком скорости рыскания. В устройстве последовательно соединены также акселерометр, первый сумматор, первый частотный селектор, блок текущих координат центра масс. Последовательно соединенны датчик ускорения силы тяжести и блок определения составляющих ускорения силы тяжести. При этом второй вход блока определения составляющих ускорения силы тяжести соединен с выходом датчика тангажа, третий вход - с выходом датчика крена; а выход - со вторым входом первого сумматора. Последовательно соединены датчик скорости тангажа, датчик скорости крена, датчик скорости рыскания и второй частотный селектор, выход которого соединен со вторым входом блока текущих координат центра масс, выход которого в свою очередь образует выходную шину смещения центра масс. Устройство позволяет контролировать в полете величину и направление смещение центра масс-центровку самолета и относится к тому же классу систем определения веса и центровки [1-6], что и заявляемое устройство. Оно определяет полетную взаимосвязь приращения абсолютного линейного ускорения аппарата в его произвольной точке по отношению к ускорению центра масс с величиной и направлением смещения этой точки от центра масс в процессе углового движения.
Недостатком известного устройства-прототипа является невозможность определения веса нагрузки в полете. Причиной, препятствующей получению указанного ниже технического результата при использовании известного устройства-прототипа, является использование кинематических соотношений при определении смещения. То есть определяется угловое движение самолета без учета физических причин движения - сил, в том числе силы веса, действующих на самолет в полете.
Основной задачей, на решение которой направлен заявляемый объект-устройство для полетного контроля веса нагрузки самолета, является повышение точности и достоверности оценки в полете действительного веса, возможно изменяющегося веса нагрузки самолета с применением его штатного приборного оборудования полностью в автономном режиме работы устройства.
Указанный технический результат достигается тем, что в устройство для полетного контроля веса нагрузки самолета, содержащее датчик скорости тангажа, датчик скорости крена, датчик скорости рыскания, сумматор, первый вход которого через дифференциатор соединен с датчиком скорости тангажа, второй вход - с выходом умножителя, входы которого соединены с датчиком скорости крена и датчиком скорости рыскания, функциональный преобразователь, введены: блок определения момента тангажа, первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый, тринадцатый входы которого соединены соответственно с выходами датчика угла атаки, датчика числа Маха, датчика скорости, датчика высоты, датчика углов отклонения интерцепторов, датчика углов отклонения закрылков, датчика углов отклонения предкрылков, датчика углов отклонения щитков, датчика углов отклонения руля высоты, датчика углов отклонения стабилизатора, датчика центровки, датчика выпуска шасси, датчика скорости тангажа, блок памяти, делитель, первый, второй, третий блоки сравнения, схема ИЛИ, коммутатор, первый вход которого, как и вход первого блока сравнения, соединены с выходом сумматора, второй вход коммутатора - с выходом делителя, первый вход которого, как и вход второго блока сравнения, подключен к выходу блока определения момента тангажа, третий вход коммутатора соединен с выходом блока памяти, четвертый вход коммутатора, как и первый вход блока памяти, соединен с выходом схемы ИЛИ, входы которой соединены соответственно с выходами первого и второго блоков сравнения, первый выход коммутатора соединен со вторым входом делителя, второй выход коммутатора - со вторым входом блока памяти, третий выход коммутатора - с входами функционального преобразователя и третьего блока сравнения.
Совокупность существенных признаков изобретения обеспечивает получение технического результата, достигаемого при осуществлении изобретения - устройства для полетного контроля веса нагрузки самолета. При этом сущность изобретения заключается в определении веса нагрузки самолета через его момент инерции по поперечной оси связанной системы координат. Для этого рассматривается динамика углового движения самолета по поперечной оси связанной системы координат [8, с.20]

где  - моменты инерции самолета соответственно по продольной, нормальной, поперечной осям;
- моменты инерции самолета соответственно по продольной, нормальной, поперечной осям;
 - угловые скорости самолета соответственно по продольной, нормальной, поперечной осям;
- угловые скорости самолета соответственно по продольной, нормальной, поперечной осям;
 - угловое ускорение самолета по поперечной оси;
- угловое ускорение самолета по поперечной оси;
MZ - момент внешних сил относительно поперечной оси - момент тангажа.
Момент тангажа МZ вычисляется в блоке определения момента тангажа по сигналам датчика угла атаки, датчика числа Маха, датчика скорости, датчика высоты, датчика углов отклонения интерцепторов, датчика углов отклонения закрылков, датчика углов отклонения предкрылков, датчика углов отклонения щитков, датчика углов отклонения руля высоты, датчика углов отклонения стабилизатора, датчика центровки, датчика выпуска шасси и датчика скорости тангажа. Учитывая соотношения моментов инерции самолета классической схемы:

выражения (1) можно записать в виде

или окончательно с учетом  для малых угловых скоростей получаем
для малых угловых скоростей получаем

Определение момента инерции по (4) возможно только при условиях:

где  - пороговые значения углового ускорения
- пороговые значения углового ускорения  и момента внешних сил MZ, для которых возможно определение момента инерции (4). Они определяются по (4) из условия точности решения задачи контроля. Если оба условия (5) выполняются, то момент инерции определяется по (4). Если же хотя бы одно из условий (5) не выполняется, то момент инерции определяется по его значению в предшествующий момент времени, когда условия (5) выполнялись. Информация о предшествующем значении момента инерции хранится в блоке памяти, а условия (5) определяются первым и вторым блоками сравнения, которые управляют работой блока памяти и коммутатором. Последний выдает либо текущее значение момента инерции с делителя, реализующего выражение (4), либо запомненное в блоке памяти значение. Момент инерции IZ по поперечной оси связанной системы координат включает три составляющие
и момента внешних сил MZ, для которых возможно определение момента инерции (4). Они определяются по (4) из условия точности решения задачи контроля. Если оба условия (5) выполняются, то момент инерции определяется по (4). Если же хотя бы одно из условий (5) не выполняется, то момент инерции определяется по его значению в предшествующий момент времени, когда условия (5) выполнялись. Информация о предшествующем значении момента инерции хранится в блоке памяти, а условия (5) определяются первым и вторым блоками сравнения, которые управляют работой блока памяти и коммутатором. Последний выдает либо текущее значение момента инерции с делителя, реализующего выражение (4), либо запомненное в блоке памяти значение. Момент инерции IZ по поперечной оси связанной системы координат включает три составляющие

где IZO - момент инерции снаряженного самолета;
IZ (mT) - момент инерции топлива в крыле самолета;
IZ(mK) - момент инерции нагрузки в фюзеляже самолета.
Вследствие малого радиуса инерции [9, с.235] топлива в крыле приближенно

Поэтому сигнал на выходе коммутатора, пропорциональный IZ, может быть контрольным сигналом по оценке веса нагрузки mK. Третий блок сравнения реализует выполнение условия

где  - максимальный момент инерции самолета по поперечной оси при максимальном допустимом весе нагрузки.
- максимальный момент инерции самолета по поперечной оси при максимальном допустимом весе нагрузки.
Одновременно, зная зависимость  для данного типа самолета, в функцииональном преобразователе вычисляется значение веса нагрузки
для данного типа самолета, в функцииональном преобразователе вычисляется значение веса нагрузки

где  - обратная функция зависимости момента инерции от веса нагрузки в фюзеляже. В функциональном преобразователе реализовано соотношение (9) так, что экипаж самолета может в полете определять текущее значение веса нагрузки.
- обратная функция зависимости момента инерции от веса нагрузки в фюзеляже. В функциональном преобразователе реализовано соотношение (9) так, что экипаж самолета может в полете определять текущее значение веса нагрузки.
Указанный технический результат в частных случаях достигается тем, что в устройстве для полетного контроля веса нагрузки самолета блок определения момента тангажа содержит блок управления и вычислитель момента тангажа, первый, второй, третий, четвертый, пятый входы которого соединены соответственно с первым, вторым, третьим, четвертым, пятым входами блока определения момента тангажа, шестой и седьмой входы которого соединены соответственно с первым и вторым входами блока управления, выход которого образует шину управления, соединенную с шестым входом вычислителя момента тангажа, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый входы которого соединены соответственно с восьмым, девятым, десятым, одиннадцатым, двенадцатым и тринадцатым входами блока определения момента тангажа, выход которого является выходом вычислителя момента тангажа. Сущность частного случая реализации блока определения момента тангажа состоит в разделении функций управления вычислениями и непрерывного вычисления момента соответственно в блоке управления и вычислителе момента тангажа. Блок управления получает на свои первый и второй входы сигналы, пропорциональные углам отклонения предкрылков и закрылков крыла самолета. По их величине он формирует сигналы управления на первом, втором, третьем или четвертом выходах шины управления и. Блок управления необходим для изменения коэффициентов в блоке вычисления момента тангажа при различных соотношениях углов предкрылков и закрылков механизации крыла во взлетном, набора высоты, крейсерском и посадочном режимах полета самолета. Вычислитель момента тангажа формирует текущее значение момента тангажа по сигналам датчика угла атаки, датчика числа Маха, датчика скорости, датчика высоты, датчика углов отклонения интерцепторов, датчика углов отклонения щитков, датчика углов отклонения руля высоты, датчика углов отклонения стабилизатора, датчика центровки, датчика выпуска шасси, датчика скорости тангажа. Указанный технический результат в частных случаях достигается тем, что в устройстве для полетного контроля веса нагрузки самолета коммутатор содержит три пары нормальнозамкнутых контактов так, что первый вход коммутатора через первую пару нормальнозамкнутых контактов соединен с его первым выходом, второй вход коммутатора через вторую пару нормальнозамкнутых контактов соединен с третьим выходом коммутатора, а через третью пару нормальнозамкнутых контактов и со вторым выходом коммутатора, третий вход коммутатора соединен с третьей парой нормальноразомкнутых контактов, четвертый вход коммутатора - с управляющим входом синхронного переключения первой, второй, третьей пар нормальнозамкнутых контактов. Коммутатор обеспечивает подключение второго входа делителя к выходу сумматора через первую пару нормальнозамкнутых контактов. Одновременно выход делителя через вторую пару нормальнозамкнутых контактов соединен с входом блока памяти вторым выходом коммутатора. Третий выход коммутатора также соединен с выходом делителя. Нормальнозамкнутые контакты коммутатора обеспечивают работу устройства по сигналам делителя, когда условия точности контроля (5) выполняются. В противном случае сигнал управления со схемы ИЛИ, поступающий на четвертый вход коммутатора, обеспечивает размыкание нормальнозамкнутых контактов и соединяет с третьим выходом коммутатора выход блока памяти, а не выход делителя. Устройство работает по запомненному значению момента инерции до тех пор, пока вычисленное значение момента тангажа MZ и приведенное значение углового ускорения  не превысят своих пороговых значений. Очевидно, это будет при маневрах самолета, желаемая интенсивность которых в наибольшей степени обусловлена точностью датчиков в устройстве.
не превысят своих пороговых значений. Очевидно, это будет при маневрах самолета, желаемая интенсивность которых в наибольшей степени обусловлена точностью датчиков в устройстве.
Указанный технический результат в частных случаях достигается тем, что в устройстве для полетного контроля веса нагрузки самолета вычислитель момента тангажа содержит семнадцать блоков переменных коэффициентов, двенадцать умножителей, два делителя, выключатель, квадратор, усилитель, дифференциатор, сумматор, два источника постоянного сигнала, две схемы вычитания так, что первый вход вычислителя момента тангажа соединен с первыми входами первого, второго, третьего, четвертого, пятого, шестого, седьмого, восьмого блоков переменных коэффициентов, входом второго дифференциатора, второй вход вычислителя момента тангажа соединен с входами девятого и десятого блоков переменных коэффициентов, выходы которых соединены соответственно с первыми входами второго и третьего умножителей, третий вход вычислителя момента тангажа соединен с первыми входами второго, третьего делителей и входом квадратора, выход которого соединен с первым входом четвертого умножителя, второй вход которого соединен с выходом второго сумматора, первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый входы которого соединены соответственно с выходами второго делителя, второй вход которого соединен с выходом пятого умножителя, шестого умножителя, первый вход которого соединен с выходом пятого блока переменного коэффициента, седьмого умножителя, первый вход которого соединен с выходом шестого блока переменного коэффициента, восьмого умножителя, первый вход которого соединен с выходом седьмого блока переменного коэффициента, девятого умножителя, первый вход которого соединен с выходом восьмого блока переменного коэффициента, третьего делителя, второй вход которого соединен с выходом третьего умножителя, четвертого блока переменного коэффициента, десятого умножителя, первый вход которого соединен с выходом третьего блока переменного коэффициента, одиннадцатого умножителя, первый вход которого соединен с выходом второго блока переменного коэффициента, первого выключателя, первый вход которого соединен с выходом первого блока переменного коэффициента, четвертый вход вычислителя момента тангажа соединен с входами одиннадцатого, двенадцатого, тринадцатого блоков переменного коэффициента, выходы которых соединены соответственно со вторым входом девятого умножителя, первыми входами двенадцатого и тринадцатого умножителей, пятый вход вычислителя момента тангажа соединен с первым входом четырнадцатого блока переменного коэффициента, выход которого соединен со вторым входом одиннадцатого умножителя, шестой вход вычислителя момента тангажа соединен шиной управления со вторыми входами первого, второго, третьего, четвертого, пятого, шестого, седьмого, восьмого, девятого, десятого, одиннадцатого, двенадцатого, тринадцатого, четырнадцатого, пятнадцатого, шестнадцатого, семнадцатого блоков переменных коэффициентов, седьмой вход вычислителя момента тангажа соединен с первым входом пятнадцатого блока переменного коэффициента, выход которого соединен со вторым входом десятого умножителя, восьмой вход вычислителя момента тангажа соединен с первым входом шестнадцатого блока переменного коэффициента, выход которого соединен со вторым входом восьмого умножителя, девятый вход вычислителя момента тангажа соединен с первым входом семнадцатого блока переменного коэффициента, выход которого соединен со вторым входом седьмого умножителя, десятый вход вычислителя момента тангажа соединен с первым суммирующим входом первой схемы вычитания, второй вычитающий вход которой соединен с выходом первого источника постоянного сигнала, а выход - со вторым входом шестого умножителя и первым вычитающим входом второй схемы вычитания, вторым суммирующим входом соединенной с выходом второго источника постоянного сигнала, а выходом - с первым входом пятого умножителя, одиннадцатый вход вычислителя момента тангажа соединен со вторым входом выключателя, двенадцатый вход вычислителя момента тангажа соединен со вторым входом двенадцатого умножителя, выход которого соединен со вторым входом третьего умножителя, второй вход второго умножителя соединен с выходом второго дифференциатора, второй вход пятого умножителя соединен с выходом тринадцатого умножителя, вторым входом подключенного к выходу второго умножителя, а выход четвертого умножителя через усилитель соединен с выходом вычислителя момента тангажа.
Вычислитель момента тангажа обеспечивает определение момента тангажа по сигналам датчика угла атаки, датчика числа Маха, датчика скорости, датчика высоты, датчика углов отклонения интерцепторов, датчика углов отклонения щитков, датчика углов отклонения руля высоты, датчика углов отклонения стабилизатора, датчика центровки, датчика выпуска шасси, датчика скорости тангажа. Вычисление проводится с переменными коэффициентами влияния параметров полета для основных углов отклонения предкрылков и закрылков механизации крыла. Команды на изменение коэффициентов поступают на вычислитель момента тангажа по шине управления с выхода блока управления.
Момент тангажа вычисляется по следующим соотношениям [3, с.124, 131; 8, с.31]:

где mZ - коэффициент момента; ρ - плотность воздуха; V - скорость полета; S - площадь крыла; bA - средняя аэродинамическая хорда крыла [1, с.232]. Коэффициент момента mZ включает [10, с.15, 34, 128, 238; 3; 8; 11]:

где  - составляющие коэффициента момента соответственно от угла атаки
- составляющие коэффициента момента соответственно от угла атаки  , безразмерной скорости угла атаки
, безразмерной скорости угла атаки  , безразмерной скорости тангажа
, безразмерной скорости тангажа  , отклонений руля высоты δв, стабилизатора δС, интерцепторов δИ, щитков δЩ, шасси δШ, от близости Земли по высоте Н; Сγ - коэффициент подъемной силы,
, отклонений руля высоты δв, стабилизатора δС, интерцепторов δИ, щитков δЩ, шасси δШ, от близости Земли по высоте Н; Сγ - коэффициент подъемной силы,  - центровка самолета, XT - координата центра тяжести по хорде крыла;
- центровка самолета, XT - координата центра тяжести по хорде крыла;  - безразмерный центр давления аэродинамической силы, ХД - координата центра давления по хорде крыла. Сумма составляющих коэффициентов получается на втором сумматоре вычислителя момента тангажа, входы которого включают все составляющие коэффициентов выражения (11), а выход через четвертый умножитель, первый квадратор и усилитель формирует момент тангажа по выражению (10). Произведение
- безразмерный центр давления аэродинамической силы, ХД - координата центра давления по хорде крыла. Сумма составляющих коэффициентов получается на втором сумматоре вычислителя момента тангажа, входы которого включают все составляющие коэффициентов выражения (11), а выход через четвертый умножитель, первый квадратор и усилитель формирует момент тангажа по выражению (10). Произведение  в выражении (10) получается с помощью коэффициентов передачи первого квадратора, четвертого умножителя и усилителя. При этом составляющий коэффициент mZO, как функция угла атаки α, формируется в четвертом блоке переменного коэффициента
в выражении (10) получается с помощью коэффициентов передачи первого квадратора, четвертого умножителя и усилителя. При этом составляющий коэффициент mZO, как функция угла атаки α, формируется в четвертом блоке переменного коэффициента

где  - переменные коэффициенты, изменяющиеся по сигналам управления на втором входе четвертого блока переменного коэффициента.
- переменные коэффициенты, изменяющиеся по сигналам управления на втором входе четвертого блока переменного коэффициента.
Коэффициент  , как функция числа Маха и высоты, формируется в девятом и тринадцатом блоках переменных коэффициентов, втором, пятом, тринадцатом умножителях, первом и втором источниках постоянного сигнала, а также первой и второй схемах вычитания так, что имеет вид:
, как функция числа Маха и высоты, формируется в девятом и тринадцатом блоках переменных коэффициентов, втором, пятом, тринадцатом умножителях, первом и втором источниках постоянного сигнала, а также первой и второй схемах вычитания так, что имеет вид:

где  - переменные коэффициенты, изменяющиеся по сигналам управления на вторых входах девятого и тринадцатого блоков переменных коэффициентов; b - постоянный коэффициент влияния центровки, реализуемый на второй схеме вычитания. Составляющая коэффициента момента, постпающая на первый вход второго сумматора, получается также с помощью вторых дифференциатора и делителя так, что сигнал на выходе второго делителя имеет вид
- переменные коэффициенты, изменяющиеся по сигналам управления на вторых входах девятого и тринадцатого блоков переменных коэффициентов; b - постоянный коэффициент влияния центровки, реализуемый на второй схеме вычитания. Составляющая коэффициента момента, постпающая на первый вход второго сумматора, получается также с помощью вторых дифференциатора и делителя так, что сигнал на выходе второго делителя имеет вид

где постоянное значение bA учитывается в переменных коэффициентах. Коэффициент  , как функция числа Маха и высоты, формируется в десятом и двенадцатом блоках переменных коэффициентов, третьем и восьмом умножителях
, как функция числа Маха и высоты, формируется в десятом и двенадцатом блоках переменных коэффициентов, третьем и восьмом умножителях

где  - переменные коэффициенты, изменяющиеся по сигналам управления на вторых входах десятого и двенадцатого блоков переменных коэффициентов. Составляющая коэффициента момента, поступающая на шестой вход второго сумматора, получается также с помощью третьего делителя так, что сигнал на выходе третьего делителя имеет вид
- переменные коэффициенты, изменяющиеся по сигналам управления на вторых входах десятого и двенадцатого блоков переменных коэффициентов. Составляющая коэффициента момента, поступающая на шестой вход второго сумматора, получается также с помощью третьего делителя так, что сигнал на выходе третьего делителя имеет вид

где постоянное значение bA учитывается в переменных коэффициентах. Коэффициент mZP.В, как функция углов атаки и отклонения руля высоты, формируется в седьмом, шестнадцатом блоках переменных коэффициентов и восьмом умножителе

где  - переменные коэффициенты, изменяющиеся по сигналам управления на вторых входах седьмого и шестнадцатого блоков переменных коэффициентов.
- переменные коэффициенты, изменяющиеся по сигналам управления на вторых входах седьмого и шестнадцатого блоков переменных коэффициентов.
Составляющая коэффициента момента  , поступающая на третий вход второго сумматора, формируется в шестом и семнадцатом блоках переменных коэффициентов и седьмом умножителе
, поступающая на третий вход второго сумматора, формируется в шестом и семнадцатом блоках переменных коэффициентов и седьмом умножителе

где  - переменные коэффициенты, изменяющиеся по сигналам управления на вторых входах шестого и семнадцатого блоков переменных коэффициентов. Составляющая коэффициента момента
- переменные коэффициенты, изменяющиеся по сигналам управления на вторых входах шестого и семнадцатого блоков переменных коэффициентов. Составляющая коэффициента момента  , поступающая на девятый вход второго сумматора, формируется во втором и четырнадцатом блоках переменных коэффициентов и одиннадцатом умножителе
, поступающая на девятый вход второго сумматора, формируется во втором и четырнадцатом блоках переменных коэффициентов и одиннадцатом умножителе

где  - переменные коэффициенты, изменяющиеся по сигналам управления на вторых входах второго и четырнадцатого блоков переменных коэффициентов. Составляющая коэффициента момента
- переменные коэффициенты, изменяющиеся по сигналам управления на вторых входах второго и четырнадцатого блоков переменных коэффициентов. Составляющая коэффициента момента  , поступающая на восьмой вход второго сумматора, формируется в третьем и пятнадцатом блоках переменных коэффициентов и десятом умножителе
, поступающая на восьмой вход второго сумматора, формируется в третьем и пятнадцатом блоках переменных коэффициентов и десятом умножителе

где  - переменные коэффициенты, изменяющиеся по сигналам управления на вторых входах третьего и пятнадцатого блоков переменных коэффициентов. Составляющая коэффициента момента
- переменные коэффициенты, изменяющиеся по сигналам управления на вторых входах третьего и пятнадцатого блоков переменных коэффициентов. Составляющая коэффициента момента  , поступающая на десятый вход второго сумматора, формируется в первом блоке переменных коэффициентов и выключателе согласно выражению
, поступающая на десятый вход второго сумматора, формируется в первом блоке переменных коэффициентов и выключателе согласно выражению

где  - переменные коэффициенты, изменяющиеся по сигналам управления на втором входе первого блока переменных коэффициентов. Выключатель обеспечивает включение этой составляющей коэффициента момента только при выпущенном шасси самолета. Составляющая коэффициента момента
- переменные коэффициенты, изменяющиеся по сигналам управления на втором входе первого блока переменных коэффициентов. Выключатель обеспечивает включение этой составляющей коэффициента момента только при выпущенном шасси самолета. Составляющая коэффициента момента  , поступающая на пятый вход второго сумматора, формируется в восьмом и одиннадцатом блоках переменных коэффициентов и девятом умножителе следующим образом
, поступающая на пятый вход второго сумматора, формируется в восьмом и одиннадцатом блоках переменных коэффициентов и девятом умножителе следующим образом

где  - переменные коэффициенты, изменяющиеся по сигналам управления на вторых входах восьмого и одиннадцатого блоков переменных коэффициентов. Составляющая коэффициента момента
- переменные коэффициенты, изменяющиеся по сигналам управления на вторых входах восьмого и одиннадцатого блоков переменных коэффициентов. Составляющая коэффициента момента  , поступающая на второй вход второго сумматора, формируется в пятом блоке переменного коэффициента, шестом умножителе и первой схеме вычитания так, что она имеет вид
, поступающая на второй вход второго сумматора, формируется в пятом блоке переменного коэффициента, шестом умножителе и первой схеме вычитания так, что она имеет вид 
где  - переменные коэффициенты, изменяющиеся по сигналам управления на втором входе пятого блока переменного коэффициента; δЦ поступает с десятого входа вычислителя момента тангажа, а δД - с выхода первого источника постоянного сигнала. Численные значения всех переменных коэффициентов аi,j i=0-2, j=1-17 получаются по аэродинамическим характеристикам конкретного самолета [см., например 11, с.350], на который устанавливается заявляемое устройство.
- переменные коэффициенты, изменяющиеся по сигналам управления на втором входе пятого блока переменного коэффициента; δЦ поступает с десятого входа вычислителя момента тангажа, а δД - с выхода первого источника постоянного сигнала. Численные значения всех переменных коэффициентов аi,j i=0-2, j=1-17 получаются по аэродинамическим характеристикам конкретного самолета [см., например 11, с.350], на который устанавливается заявляемое устройство.
Указанный технический результат в частных случаях достигается тем, что в устройстве для полетного контроля веса самолета блок управления содержит семь блоков сравнения и четыре схемы И так, что первый вход блока управления соединен с входами четвертого, пятого, шестого блоков сравнения, второй вход блока управления соединен с входами седьмого, восьмого, девятого, десятого блоков сравнения, первый вход первой схемы И, как и первый вход второй схемы И, соединен с выходом четвертого блока сравнения, второй вход - с выходом восьмого блока сравнения, а выход первой схемы И - с первым выходом шины управления, второй вход второй схемы И соединен с выходом седьмого блока сравнения, а выход - со вторым выходом шины управления, первый вход третьей схемы И соединен с выходом пятого блока сравнения, второй вход - с выходом девятого блока сравнения, а выход третьей схемы И - с третьим выходом шины управления, первый вход четвертой схемы И соединен с выходом шестого блока сравнения, второй вход - с выходом десятого блока сравнения, а выход четвертой схемы И - с четвертым выходом шины управления. Блок управления формирует сигналы и, поступающие по шине управления на блоки переменных коэффициентов. Эти сигналы определяются основными конфигурациями крыла самолета по отклонению его предкрылков и закрылков при взлете, наборе высоты, крейсерском полете, посадке [12, с.84-85; 13]. Основные конфигурации углов отклонения предкрылков и закрылков определяются по сигналам соответствующих датчиков углов отклонения закрылков и предкрылков в четвертом, пятом, шестом, седьмом, восьмом, девятом и десятом блоках сравнения. Парные комбинации сигналов названных блоков сравнения в первой, второй, третьей и четвертой схемах И образуют сигналы на первом, втором, третьем или четвертом выходах шины управления и. Конкретные значения углов отклонения предкрылков и закрылков, на которые настроены блоки сравнения при формировании сигналов, поступающих на схемы И, зависят от типа самолета, точности аппроксимации его аэродинамических характеристик, числа основных конфигураций углов отклонения предкрылков и закрылков [12].
Указанный технический результат достигается также тем, что в устройстве для полетного контроля веса нагрузки самолета блок переменного коэффициента содержит источник постоянного сигнала, квадратор, сумматор и три усилителя с переменными коэффициентами усиления, первый, второй, третий, четвертый управляющие входы которых соединены с одноименными входами шины управления на втором входе блока переменного коэффициента, пятый вход первого усилителя с переменным коэффициентом усиления соединен с выходом третьего источника постоянного сигнала, а выход - с первым входом третьего сумматора, пятый вход второго усилителя с переменным коэффициентом усиления, как и вход второго квадратора, соединен с первым входом блока переменного коэффициента усиления, а выход - со вторым входом третьего сумматора, пятый вход третьего усилителя с переменным коэффициентом усиления соединен с выходом второго квадратора, а выход - с третьим входом третьего сумматора, выход которого является выходом блока переменного коэффициента. Блок переменного коэффициента реализует полиномиальную аппроксимацию (сплайнами) составляющих коэффициента (10) момента mZ.
Аппроксимация выполнена полиномами второго порядка вида

где  - переменные коэффициенты, реализуемые на первом, втором и третьем усилителях с переменными коэффициентами усиления; х - параметр полета или угол отклонения аэродинамической поверхности, от которого зависит изменение коэффициента момента. В качестве последнего рассматриваются угол атаки, высота, число Маха, угловые отклонения руля высоты, стабилизатора, интерцепторов, щитков, выпуск шасси. Параметр полета х поступает на первый вход блока переменного коэффициента и далее на на пятый вход второго усилителя второй - пропорциональной составляющей аппроксимации в выражении (24). Третья - квадратурная составляющая аппроксимации (24) получается на выходе третьего усилителя с переменным коэффициентом усиления после прохождения параметра полета второго квадратора и третьего усилителя с переменным коэффициентом усиления. Постоянный сигнал с выхода третьего источника постоянного сигнала совместно с первым усилителем с переменным коэффициентом усиления формируют коэффициент a0,j в (24). Третий сумматор объединяет три составляющих аппроксимирующего полинома.
- переменные коэффициенты, реализуемые на первом, втором и третьем усилителях с переменными коэффициентами усиления; х - параметр полета или угол отклонения аэродинамической поверхности, от которого зависит изменение коэффициента момента. В качестве последнего рассматриваются угол атаки, высота, число Маха, угловые отклонения руля высоты, стабилизатора, интерцепторов, щитков, выпуск шасси. Параметр полета х поступает на первый вход блока переменного коэффициента и далее на на пятый вход второго усилителя второй - пропорциональной составляющей аппроксимации в выражении (24). Третья - квадратурная составляющая аппроксимации (24) получается на выходе третьего усилителя с переменным коэффициентом усиления после прохождения параметра полета второго квадратора и третьего усилителя с переменным коэффициентом усиления. Постоянный сигнал с выхода третьего источника постоянного сигнала совместно с первым усилителем с переменным коэффициентом усиления формируют коэффициент a0,j в (24). Третий сумматор объединяет три составляющих аппроксимирующего полинома.
Переменные коэффициенты  синхронно изменяются по сигналу управления на втором управляющем входе блока переменного коэффициента. Сигнал управления зависит от конфигурации углов отклонения предкрылков и закрылков крыла самолета. По количеству управляющих входов (четыре), первого, второго, третьего усилителей с переменным коэффициентом усиления аппроксимация составляющих коэффициентов моментов реализована для четырех основных конфигураций углов отклонения предкрылков и закрылков при взлете, наборе высоты, крейсерском полете и посадке самолета.
синхронно изменяются по сигналу управления на втором управляющем входе блока переменного коэффициента. Сигнал управления зависит от конфигурации углов отклонения предкрылков и закрылков крыла самолета. По количеству управляющих входов (четыре), первого, второго, третьего усилителей с переменным коэффициентом усиления аппроксимация составляющих коэффициентов моментов реализована для четырех основных конфигураций углов отклонения предкрылков и закрылков при взлете, наборе высоты, крейсерском полете и посадке самолета.
Проведенный заявителем анализ уровня техники установил, что аналоги, характеризующиеся совокупностями признаков, тождественными всем признакам заявленного устройства для полетного контроля веса нагрузки самолета, отсутствуют, следовательно, заявленное изобретение соответствует условию ″новизна″.
Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата и изобретение не основано на:
- дополнении известного устройства-аналога какой-либо известной частью, присоединенной к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно этого дополнения;
- замене какой-либо части устройства-аналога другой известной частью для достижения технического результата, в отношении которого установлено влияние именно такого дополнения;
- исключении какой-либо части устройства-аналога с одновременным исключением, обусловленной ее наличием функции, и достижением обычного для такого исключения результата;
- увеличении количества однотипных элементов для усиления технического результата, обусловленного наличием в устройстве именно таких элементов;
- выполнении известного устройства-аналога или его части из известного материала для достижения технического результата, обусловленного известными свойствами материала;
- создание устройства, состоящего из известных частей, выбор которых и связь между которыми осуществлены на основании известных правил и достигаемый при этом технический результат обусловлен только известными свойствами частей этого устройства и связей между ними;
- изменениии количественного признака (признаков) устройства и предоставлении таких признаков во взаимосвязи либо изменение вида взаимосвязи, если известен факт влияния каждого из них на технический результат и новые значения этих признаков или их взаимосвязь могли быть получены исходя из известных зависимостей, следовательно, заявленное изобретение соответствует ″изобретательскому уровню″.
Сущность изобретения поясняется чертежами, где на фиг.1 изображена структурная схема устройства для полетного контроля веса нагрузки самолета. На фиг.1 приняты следующие обозначения:
1 - датчик скорости тангажа;
2 - датчик скорости крена;
3 - датчик скорости рыскания;
4-1 - первый сумматор;
5-1 - первый дифференциатор;
6-1 - первый умножитель;
7 - блок определения момента тангажа;
8 - датчик угла атаки;
9 - датчик числа Маха;
10 - датчик скорости;
11 - датчик высоты;
12 - датчик углов отклонения интерцепторов;
13 - датчик углов отклонения закрылков;
14 - датчик углов отклонения предкрылков;
15 - датчик углов отклонения щитков;
16 - датчик углов отклонения руля высоты;
17 - датчик углов отклонения стабилизатора;
18 - датчик центровки;
19 - датчик выпуска шасси;
20 - блок памяти;
21-1 - первый делитель;
22-1, 22-2, 22-3 - первый, второй, третий блоки сравнения;
23 - схема ИЛИ;
24 - функциональный преобразователь;
25 - коммутатор.
На фиг.2 приведена структурная схема блока 7 определения момента тангажа по п.2 формулы, где приняты следующие обозначения:
7 - блок определения момента тангажа;
26 - блок управления;
27 - вычислитель момента тангажа.
На фиг.3 приведена структурная схема коммутатора 25 по п.3 формулы, где приняты следующие обозначения:
25 - коммутатор;
28-1, 28-2, 28-3 - первая, вторая, третья пара нормальнозамкнутых контактов.
На фиг.4 приведена структурная схема вычислителя 27 момента тангажа по п.4 формулы, где приняты следующие обозначения:
4-2 - второй сумматор;
5-2 - второй дифференциатор;
6-2, 6-3, 6-4, 6-5, 6-6, 6-7, 6-8, 6-9, 6-10, 6-11, 6-12, 6-13 - второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый, тринадцатый умножители;
21-2, 21-3 - второй и третий делители;
29-1, 29-2, 29-3, 29-4, 29-5, 29-6, 29-7, 29-8, 29-9, 29-10, 29-11, 29-12, 29-13, 29-14, 29-15, 29-16, 29-17 - первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый, тринадцатый, четырнадцатый, пятнадцатый, шестнадцатый, семнадцатый блоки переменных коэффициентов;
30 - выключатель;
31-1 - первый квадратор;
32 - усилитель;
33-1, 33-2 - первый, второй источники постоянного сигнала;
34-1, 34-2 - первая, вторая схемы вычитания.
На фиг.5 приведена структурная схема блока 26 управления по п.5 формулы, где приняты следующие обозначения:
22-4, 22-5, 22-6, 22-7, 22-8, 22-9, 22-10 - четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый блоки сравнения;
35-1, 35-2, 35-3, 35-4 - первая, вторая, третья, четвертая схемы И.
На фиг.6 приведена структурная схема блока 29-1÷17 переменного коэффициента по п.6 формулы, где приняты следующие обозначения:
4-3 - третий сумматор;
31-2 - второй квадратор;
36-1, 36-2, 36-3 - первый, второй, третий усилители с переменным коэффициентом усиления.
Устройство для полетного контроля веса нагрузки самолета содержит датчик 1 скорости тангажа, датчик 2 скорости крена, датчик 3 скорости рыскания, сумматор 4-1, первый вход которого соединен через дифференциатор 5-1 с датчиком 1 скорости тангажа, второй вход - с выходом умножителя 6-1, входы которого соединены с выходами датчика 2 скорости крена и датчика 3 скорости рыскания, блок 7 определения момента тангажа, первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый, тринадцатый входы которого соединены соответственно с выходами датчика 8 угла атаки, датчика 9 числа Маха, датчика 10 скорости, датчика 11 высоты, датчика 12 углов отклонения интерцепторов, датчика 13 угла отклонения закрылков, датчика 14 угла отклонения предкрылков, датчика 15 угла отклонения щитков, датчика 16 угла отклонения руля высоты, датчика 17 угла отклонения стабилизатора, датчика 18 центровки, датчика 19 выпуска шасси, датчика 1 скорости тангажа, блок 20 памяти, делитель 21-1, первый блок 22-1 сравнения, второй блок 22-2 сравнения, третий блок 22-3 сравнения, схему 23 ИЛИ, функциональный преобразователь 24, коммутатор 25, первый вход которого, как и вход первого блока 22-1 сравнения, соединены с выходом сумматора 4-1, второй вход - с выходом делителя 21, первый вход которого, как и вход второго блока 22-2 сравнения, подключен к выходу блока 7 определения момента тангажа, третий вход - с выходом блока 20 памяти, четвертый вход, как и первый вход блока 20 памяти, - с выходом схемы 23 ИЛИ, входы которой соединены соответственно с выходами первого блока 22-1 сравнения и второго блока 22-2 сравнения, первый выход - со вторым входом делителя 21, второй выход - со вторым входом блока 20 памяти, третий выход - с входами функционального преобразователя 24 и третьего блока 22-3 сравнения.
Блок 7 определения момента тангажа содержит блок 26 управления и вычислитель 27 момента тангажа, первый, второй, третий, четвертый, пятый входы которого соединены соответственно с первым, вторым, третьим, четвертым, пятым входами блока 7 определения момента тангажа, шестой и седьмой входы которого соединены соответственно с первым и вторым входами блока 26 управления, выход которого образует шину и управления, соединенную с шестым входом вычислителя момента тангажа, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый входы которого соединены соответственно с восьмым, девятым, десятым, одиннадцатым, двенадцатым и тринадцатым входами блока 7 определения момента тангажа, выход которого является выходом вычислителя 27 момента тангажа.
Коммутатор 25 содержит три пары нормальнозамкнутых контактов 28-1, 28-2, 28-3 так, что первый вход коммутатора 25 через первую пару нормальнозамкнутых контактов 28-1 соединен с его первым выходом, второй вход коммутатора 25 через вторую пару нормальнозамкнутых контактов 28-2 соединен с третьим выходом коммутатора 25, а через третью пару нормальнозамкнутых контактов 28-3 и со вторым выходом коммутатора 25, третий вход которого соединен с третьей парой нормально-разомкнутых контактов 28-3, четвертый вход - с управляющим входом коммутатора 25 синхронного переключения первой 28-1, второй 28-2, третьей 28-3 пар нормальнозамкнутых контактов.
Вычислитель 27 момента тангажа содержит семнадцать блоков переменных коэффициентов 29-1÷17, двенадцать умножителей 6-2÷13, два делителя 21-2÷3, выключатель 30, квадратор 31-1, усилитель 32, дифференциатор 5-2, сумматор 4-2, два источника 33-1÷2 постоянного сигнала, две схемы 34-1÷2 вычитания. При этом первый вход вычислителя 27 момента тангажа соединен с первыми входами блоков 29-1, 29-2, 29-3, 29-4, 29-5, 29-6, 29-7, 29-8 переменных коэффициентов, входом дифференциатора 5-2. Второй вход вычислителя 27 момента тангажа соединен с входами блоков 29-9, 29-10 переменных коэффициентов, выходы которых соединены соответственно с первыми входами умножителей 6-2, 6-3. Третий вход вычислителя 27 момента тангажа соединен с первыми входами делилителей 21-2, 21-3 и входом квадратора 31-1, выход которого соединен с первым входом умножителя 6-4, второй вход которого соединен с выходом сумматора 4-2. Первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый входы сумматора 4-2 соединены соответственно с выходами делителя 21-2, второй вход которого соединен с выходом умножителя 6-5, умножителя 6-6, первый вход которого соединен с выходом блока 29-5 переменного коэффициента, умножителя 6-7, первый вход которого соединен с выходом блока 29-6 переменного коэффициента, умножителя 6-8, первый вход которого соединен с выходом блока 29-7 переменного коэффициента, умножителя 6-9, первый вход которого соединен с выходом блока 29-8 переменного коэффициента, делителя 21-3, второй вход которого соединен с выходом умножителя 6-3, блока 29-4 переменного коэффициента, умножителя 6-10, первый вход которого соединен с выходом блока 29-3 переменного коэффициента, умножителя 6-11, первый вход которого соединен с выходом блока 29-2 переменного коэффициента, выключателя 30, первый вход которого соединен с выходом блока 29-1 переменного коэффициента. Четвертый вход вычислителя 27 момента тангажа соединен с входами блоков 29-11, 29-12, 29-13 переменного коэффициента, выходы которых соединены соответственно со вторым входом умножителя 6-9, первыми входами умножителей 6-12, 6-13. Пятый вход вычислителя 27 момента тангажа соединен с первым входом блока 29-14 переменного коэффициента, выход которого соединен со вторым входом умножителя 6-11. Шестой вход вычислителя 27 момента тангажа соединен шиной управления со вторыми входами блоков 29-1, 29-2, 29-3, 29-4, 29-5, 29-6, 29-7, 29-8, 29-9, 29-10, 29-11, 29-12, 29-13, 29-14, 29-15, 29-16, 29-17 переменных коэффициентов. Седьмой вход вычислителя 27 момента тангажа соединен с первым входом блока 29-15 переменного коэффициента, выход которого соединен со вторым входом умножителя 6-10. Восьмой вход вычислителя 27 момента тангажа соединен с первым входом блока 29-16 переменного коэффициента, выход которого соединен со вторым входом умножителя 6-8. Девятый вход вычислителя 27 момента тангажа соединен с первым входом блока 29-17 переменного коэффициента, выход которого соединен со вторым входом умножителя 6-7. Десятый вход вычислителя 27 момента тангажа соединен с первым суммирующим входом схемы 34-1 вычитания, второй вычитающий вход которой соединен с выходом источника 33-1 постоянного сигнала, а выход - со вторым входом умножителя 6-6 и первым вычитающим входом схемы 34-2 вычитания, вторым суммирующим входом соединенной с выходом источника 33-2 постоянного сигнала, а выходом - с первым входом умножителя 6-5. Одиннадцатый вход вычислителя 27 момента тангажа соединен со вторым входом выключателя 30. Двенадцатый вход вычислителя 27 момента тангажа соединен со вторым входом умножителя 6-12, выход которого соединен со вторым входом умножителя 6-3. Второй вход умножителя 6-2 соединен с выходом второго дифференциатора 5-2. Второй вход умножителя 6-5 соединен с выходом умножителя 6-13, вторым входом подключенного к выходу умножителя 6-2. Выход умножителя 6-4 через усилитель 32 соединен с выходом вычислителя 27 момента тангажа.
Блок управления 26 содержит семь блоков 22-4÷10 сравнения и четыре схемы 35-1÷4 И. Первый вход блока 26 управления соединен с входами блоков 22-4, 22-5, 22-6 сравнения, второй вход блока 26 управления соединен с входами блоков 22-7, 22-8, 22-9, 22-10 сравнения. Первый вход схемы 35-1 И, как и первый вход схемы 35-2 И, соединен с выходом блока 22-4 сравнения, второй вход - с выходом блока 22-8 сравнения, а выход - с первым выходом шины управления. Второй вход схемы 35-2 И соединен с выходом блока 22-7 сравнения, а выход - со вторым выходом шины управления. Первый вход схемы 35-3 И соединен с выходом блока 22-5 сравнения, второй вход - с выходом блока 22-9 сравнения, а выход - с третьим выходом шины управления. Первый вход схемы 35-4 И соединен с выходом блока 22-6 сравнения, второй вход - с выходом блока 22-10 сравнения, а выход - с четвертым выходом шины управления.
Блок 29-1÷17 переменного коэффициента содержит источник 33-3 постоянного сигнала, квадратор 31-2, сумматор 4-3 и усилители 36-1÷3 с переменными коэффициентами усиления. Первый, второй, третий, четвертый управляющие входы усилителей 36-1÷3 соединены с одноименными входами шины управления и на втором входе блоков 29-1÷17 переменного коэффициента. Пятый вход усилителя 36-1 с переменным коэффициентом усиления соединен с выходом источника 33-3 постоянного сигнала, а выход - с первым входом сумматора 4-3. Пятый вход усилителя 36-2 с переменным коэффициентом усиления, как и вход квадратора 31-2, соединен с первым входом блока 29-1÷17 переменного коэффициента усиления, а выход - со вторым входом сумматора 4-3. Пятый вход усилителя 36-3 с переменным коэффициентом усиления соединен с выходом квадратора 31-2, а выход - с третьим входом сумматора 4-3, выход которого является выходом блока 29-1÷17 переменного коэффициента.
Практическая реализация устройства для полетного контроля веса нагрузки самолета возможна на аналоговой и цифровой схемотехнической базе. При этом следует учесть, что датчик 1 скорости тангажа, датчик 2 скорости крена и датчик 3 скорости рыскания входят в состав серийно выпускаемых инерциальных навигационных систем И-42, БИНС-85 и др. [14, с.64, 77]. Датчик 8 угла атаки, датчик 9 числа Маха, датчик 10 скорости и датчик 11 высоты входят в состав серийно выпускаемых систем воздушных сигналов ИК-ВСП-2-10-1, СВС-2Ц-У, СВС-85 и др. [14, с.87, 88]. Датчик 12 углов отклонения интерцепторов, датчик 13 углов отклонения закрылков, датчик 14 углов отклонения предкрылков, датчик 15 углов отклонения щитков, датчик 16 углов отклонения руля высоты, датчик 17 углов отклонения стабилизатора, датчик 18 центровки и датчик 19 выпуска шасси или/и их индикаторы серийно выпускаются и, например, входят в состав приборного оборудования самолета ИЛ-86 [12, с.81; 15; 16]. Сумматоры 4-1,... 4-3, дифференциаторы 5-1, 5-2, умножители 6-1,... 6-12, блок 20 памяти, делители 21-1,... 21-3, блоки 22-1,... 22-10 сравнения реализуются на интегральных микросхемах [17, с.75, 82, 98, 181, 94, 174]. Схема 23 ИЛИ, схемы 35-1,... 35-4 И реализуются на логических микросхемах [18, с.77]. Функциональный преобразователь 24, коммутатор 25, выключатель 30, квадраторы 31-1, 31-2, усилитель 32, источники 33-1,... 33-3 постоянного сигнала, схемы 34-1, 34-2 вычитания, усилители 36-1,... 36-3 с переменным коэффициентом усиления могут быть построены с применением прецизионных аналоговых интегральных схем различной степени интеграции [17, с.59, 61, 192, 98, 147; 18, с.370, 371]. Предпочтительна реализация заявляемого устройства программными средствами БЦВМ самолета на ЦВМ 80, ЦВМ 90 [14, с.337-343] или микропроцессорах обработки сигналов [19, с.69; 20].
Устройство для полетного контроля веса нагрузки самолета работает следующим образом. Сигналы, пропорциональные углу α атаки, числу Маха М, скорости V, высоте Н полета, угловой скорости ωZ тангажа самолета, поступают соответственно на первый, второй, третий, четвертый и тринадцатый входы блока 7 определения момента тангажа с датчика 8 угла атаки, датчика 9 числа Маха, датчика 10 скорости, датчика 11 высоты и датчика 1 скорости тангажа. Одновременно на пятый, шестой, седьмой, восьмой входы блока 7 определения момента тангажа поступают сигналы, пропорциональные углам δИ отклонения интерцепторов, углам δЗ отклонения закрылков, углам δП отклонения предкрылков, углам δЩ отклонения щитков соответственно с выходов датчика 12 углов отклонения интерцепторов, датчика 13 углов отклонения закрылков, датчика 14 углов отклонения предкрылков, датчика 15 углов отклонения щитков, относящихся к механизации крыла самолета. На девятый, десятый, одиннадцатый, двенадцатый входы блока 7 определения момента тангажа поступают сигналы, пропорциональные углам δВ, отклонения руля высоты, углам δС отклонения стабилизатора, центровке δЦ, углам δШ выпуска шасси соответственно с датчика 16 углов отклонения руля высоты, датчика 17 углов отклонения стабилизатора, датчика 18 центровки, датчика 19 выпуска шасси. В блоке 7 определения момента тангажа вычисляется значение момента MZ тангажа, действующего на самолет по его поперечной оси в процессе полета. Сигнал, пропорциональный величине этого момента, поступает на выход блока 7 определения момента тангажа и далее на первый вход делителя 21-1 и вход блока 22-2 сравнения. Одновременно сигнал, пропорциональный угловой скорости ωZ тангажа, поступает на вход дифференциатора 5-1. Выходные сигналы, пропорциональные угловой скорости ωX крена и угловой скорости ωY рыскания, поступают на входы умножителя 6-1 с выходов датчика 2 скорости крена и датчика 3 скорости рыскания. После дифференцирования сигнала, пропорционального ωZ, и перемножения сигналов, пропорциональных ωX иωY на выходе сумматора 4-1, получается сигнал, пропорциональный  - приведенному угловому ускорению самолета. Этот сигнал поступает на первый вход коммутатора 25 и блок 22-1 сравнения. В том случае, если
- приведенному угловому ускорению самолета. Этот сигнал поступает на первый вход коммутатора 25 и блок 22-1 сравнения. В том случае, если  , что проверяется в блоке 22-1 сравнения, то сигнал
, что проверяется в блоке 22-1 сравнения, то сигнал  , пройдя через первый вход и первый выход коммутатора 25, поступает на второй вход делителя 21-1. В том случае, если выполняется и условие
, пройдя через первый вход и первый выход коммутатора 25, поступает на второй вход делителя 21-1. В том случае, если выполняется и условие  , которое проверяется в блоке 22-2 сравнения, то делитель 21-1 выполняет деление сигналов так, что его выходной сигнал пропорционален моменту инерции
, которое проверяется в блоке 22-2 сравнения, то делитель 21-1 выполняет деление сигналов так, что его выходной сигнал пропорционален моменту инерции  . С выхода делителя 21-1 этот сигнал поступает на второй вход коммутатора 25 и через его нормальнозамкнутые контакты на его второй и третий выходы. Со второго выхода коммутатора 25 сигнал поступает на второй сигнальный вход блока 20 памяти, где происходит его повторение без запоминания, так как на первом управляющем входе блока 20 памяти нет сигнала. С третьего выхода коммутатора 25 сигнал поступает на функциональный преобразователь 24, реализующий (9) обратную функцию зависимости момента инерции от нагрузки в фюзеляже самолета. Далее этот выходной сигнал устройства полетного контроля веса mK нагрузки самолета поступает на штатные средства цифровой индикации в кабине экипажа и бортовой регистратор. Сигнал, поступающий на блок 22-3 сравнения, сопоставляется с допустимым значением момента инерции по условию (8). В том случае, если имеет место перегруз самолета, блок 22-3 сравнения выдает сигнал "перегрузка" на индикатор в кабине экипажа и бортовой регистратор.
. С выхода делителя 21-1 этот сигнал поступает на второй вход коммутатора 25 и через его нормальнозамкнутые контакты на его второй и третий выходы. Со второго выхода коммутатора 25 сигнал поступает на второй сигнальный вход блока 20 памяти, где происходит его повторение без запоминания, так как на первом управляющем входе блока 20 памяти нет сигнала. С третьего выхода коммутатора 25 сигнал поступает на функциональный преобразователь 24, реализующий (9) обратную функцию зависимости момента инерции от нагрузки в фюзеляже самолета. Далее этот выходной сигнал устройства полетного контроля веса mK нагрузки самолета поступает на штатные средства цифровой индикации в кабине экипажа и бортовой регистратор. Сигнал, поступающий на блок 22-3 сравнения, сопоставляется с допустимым значением момента инерции по условию (8). В том случае, если имеет место перегруз самолета, блок 22-3 сравнения выдает сигнал "перегрузка" на индикатор в кабине экипажа и бортовой регистратор.
При невыполнении одного или обоих условий (5), которые проверяются блоками 22-1 и 22-2 сравнения, на выходе одного или обоих блоков 22-1 и/или 22-2 сравнения появляется сигнал, который, пройдя схему 23 ИЛИ, поступает на первый вход блока 20 памяти и четвертый управляющий вход коммутатора 25. Одновременно переключаются все контактные пары коммутатора 25 так, что сигналы делителя 21-1 не поступают на третий выход коммутатора 25, а значит, и входы функционального преобразователя 24 и блока 22-3 сравнения. Сигнал на первом входе управления блока 20 памяти переводит его в режим хранения значения сигнала, поступавшего на его второй сигнальный вход в предшествующий момент времени. Нормальноразомкнутый контакт коммутатора 25 соединяет его третий вход с третьим выходом и запомненное значение сигнала, пропорциональное моменту инерции, вычисленному в предшествующий момент времени, поступает на функциональный преобразователь 24 и блок 22-3 сравнения. Устройство полетного контроля веса нагрузки самолета работает в режиме памяти. Этот режим сохраняет для экипажа непрерывную информацию о нагрузке mK до момента времени, пока не будут выполнены условия (5). Длительность режима памяти определяется точностью работы заявляемого устройства, собственной динамикой самолета и управлением летчика.
Блок 7 определения момента тангажа работает следующим образом. Сигналы датчика 8 угла атаки, датчика 9 числа Маха, датчика 10 скорости, датчика 11 высоты, датчика 12 углов отклонения интерцепторов поступают соответственно на первый, второй, третий, четвертый, пятый входы блока 7 определения момента тангажа и одноименные входы вычислителя 27 момента тангажа. Одновременно с датчика 15 углов отклонения щитков, датчика 16 углов отклонения руля высоты, датчика 17 углов отклонения стабилизатора, датчика 18 центровки, датчика 19 выпуска шасси сигналы поступают соответственно на восьмой, девятый, десятый, одиннадцатый, двенадцатый, тринадцатый входы блока 7 определения момента тангажа. Сигналы с восьмого, девятого, десятого, одиннадцатого, двенадцатого, тринадцатого входов блока 7 определения момента тангажа поступают соответственно на седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый входы вычислителя 27 момента тангажа, управление которым ведется по сигналу на его шестом входе. На шестой вход вычислителя 27 момента тангажа поступает управляющий сигнал и по шине управления с блока 26 управления. Сигнал и формируется в блоке 26 управления для изменения переменных коэффициентов в вычислителе 27 момента тангажа. Для этого на первый и второй входы блока 26 управления поступают соответственно сигналы с шестого и седьмого входов блока 7 определения момента тангажа, которые получают сигналы датчика 13 углов отклонения закрылков и датчика 14 углов отклонения предкрылков. Этим учитывается влияние изменения аэродинамики самолета при работе механизации крыла на взлете, наборе высоты, крейсерском полете и посадке.
Коммутатор 25 работает следующим образом. При выполнении условий (5) нормальнозамкнутые контакты 28-1 обеспечивают передачу сигнала с первого входа коммутатора 25 на его первый выход. Этим обеспечивается подключение выходного сигнала сумматора 4-1 к делителю 21-1. Одновременно сигнал со второго входа коммутатора 25 через нормальнозамкнутые контакты 28-2, 28-3 поступает на его второй и третий выходы. Выходной сигнал делителя поступает на функциональный преобразователь 24 и блок 22-3 сравнения. Выходной сигнал с блока 20 памяти на третьм входе коммутатора 25 отключен от третьего выхода. При невыполнении условий (5) на четвертый управляющий вход коммутатора 25 поступает сигнал со схемы 23 ИЛИ. Происходит синхронное переключение нормальнозамкнутых контактов 28-1, 28-2, 28-3. Это обеспечивает отключение выходного сигнала делителя 21-1 от третьего выхода коммутатора и подключение к нему выхода блока 20 памяти. Сигнал на третий выход коммутатора 25 поступает с его третьего входа через нормальноразомкнутые контакты.
Вычислитель 27 момента тангажа работает следующим образом. Сигнал пропорциональный углу α атаки с первого входа вычислителя 27 момента тангажа поступает на первые входы блоков 29-1, 29-2, 29-3, 29-4, 29-5, 29-6, 29-7, 29-8 переменных коэффициентов и вход дифференциатора 5-2. При этом учитывается зависимость составляющих коэффициента момента от угла атаки самолета. Сигнал, пропорциональный числу М Маха со второго входа вычислителя 27 момента тангажа, поступает на первые входы блоков 29-9, 29-10 переменных коэффициентов, выходные сигналы которых поступают соответственно на первые входы умножителей 6-2 и 6-3. Сигнал, пропорциональный скорости V, поступает на третий вход вычислителя 27 момента тангажа и далее на первые входы делителей 21-2, 21-3 и вход квадратора, 31-1. Выходной сигнал квадратора пропорциональный V2, поступает на первый вход умножителя 6-4, на второй вход которого поступает выходной сигнал сумматора 4-2. Сумматор 4-2 суммирует на своих первом, втором, третьем, четвертом, пятом, шестом, седьмом, восьмом, девятом, десятом входах сигналы, пропорциональные соответствующим составляющим

коэффициента момента в выражении (11). При этом сигнал на первый вход сумматора 4-2 поступает с выхода делителя 21-2, на второй вход которого поступает выходной сигнал умножителя 6-5. На второй вход сумматора 4-2 поступает сигнал с выхода умножителя 6-6, на первый вход которого поступает сигнал с выхода блока 29-5 переменного коэффициента. На третий вход сумматора 4-2 поступает сигнал с выхода умножителя 6-7, на первый вход которого поступает сигнал с выхода блока 29-6 переменного коэффициента. На четвертый вход сумматора 4-2 поступает сигнал с выхода умножителя 6-8, на первый вход которого поступает сигнал с выхода блока 29-7 переменного коэффициента. На пятый вход сумматора 4-2 поступает сигнал с выхода умножителя 6-9, на первый вход которого поступает сигнал с выхода блока 29-8 переменного коэффициента. На шестой вход сумматора 4-2 поступает сигнал с выхода делителя 21-3, на второй вход которого поступает сигнал с выхода умножителя 6-3. На седьмой вход сумматора 4-2 поступает сигнал с выхода блока 29-4 переменного коэффициента. На восьмой вход сумматора 4-2 поступает сигнал с выхода умножителя 6-10, на первый вход которого поступает сигнал с выхода блока 29-3 переменного коэффициента. На девятый вход сумматора 4-2 поступает сигнал с выхода умножителя 6-11, на первый вход которого поступает сигнал с выхода блока 29-2 переменного коэффициента. На десятый вход сумматора 4-2 поступает сигнал с выхода выключателя 30, на первый вход которого поступает сигнал с выхода блока 29-1 переменного коэффициента. Сигнал, пропорциональный высоте Н поступает на четвертый вход вычислителя 27 момента тангажа и далее на первые входы блоков 29-11, 29-12, 29-13 переменного коэффициента, выходные сигналы которых поступают соответственно на второй вход умножителя 6-9, первый вход умножителя 6-12 и первый вход умножителя 6-13. Сигнал, пропорциональный углу δИ отклонения интерцепторов, поступает на пятый вход вычислителя 27 момента тангажа и далее на первый вход блока 29-14 переменного коэффициента, выходной сигнал которого поступает на второй вход умножителя 6-11. Сигнал управления и по шине управления поступает на шестой вход вычислителя 27 момента тангажа и далее на вторые входы блоков 29-1, 29-2, 29-3, 29-4, 29-5, 29-6, 29-7, 29-8, 29-9, 29-10, 29-11, 29-12, 29-13, 29-14, 29-15, 29-16, 29-17 переменных коэффициентов. На седьмой вход вычислителя 27 момента тангажа поступает сигнал, пропорциональный углу δЩ отклонения щитков, который поступает далее на первый вход блока 29-15 переменного коэффициента, выходной сигнал которого в свою очередь поступает на второй вход умножителя 6-10. Сигнал, пропорциональный углу δВ отклонения руля высоты, поступает на восьмой вход вычислителя 27 момента тангажа и далее на первый вход блока 29-16 переменного коэффициента, выходной сигнал которого поступает на второй вход умножителя 6-8. Сигнал, пропорциональный углу δС, отклонения стабилизатора поступает на девятый вход вычислителя 27 момента тангажа и далее на первый вход блока 29-17 переменного коэффициента, выходной сигнал которого поступает на второй вход умножителя 6-7. Сигнал, пропорциональный центровке δЦ самолета, поступает на десятый вход вычислителя 27 момента тангажа и далее на первый суммирующий вход схемы 34-1 вычитания, на второй вычитающий вход которой поступает выходной сигнал источника 33-1 постоянного сигнала. Выходной сигнал схемы 34-1 вычитания поступает на второй вход умножителя 6-6 и первый вычитающий вход схемы 34-2 вычитания, на второй суммирующий вход которой поступает сигнал с выхода источника 33-2 постоянного сигнала. Выходной сигнал схемы 34-2 вычитания поступает на первый вход умножителя 6-5. Сигнал, пропорциональный углу δШ выпуска шасси, поступает на на одиннадцатый вход вычислителя 27 момента тангажа и далее на второй вход выключателя 30, который отключает выходной сигнал блока 29-1 переменного коэффициента от десятого входа сумматора 4-2 при уборке шасси в полете. Сигнал, пропорциональный угловой скорости ωZ у тангажа, поступает на двенадцатый вход вычислителя 27 момента тангажа и далее на второй вход умножителя 6-12, выходной сигнал которого в свою очередь поступает на второй вход умножителя 6-3. Сигнал, пропорциональный  с выхода дифференциатора 5-2, поступает на второй вход умножителя 6-2. Выходной сигнал умножителя 6-13, на второй вход которого поступает сигнал с умножителя 6-2, поступает на второй вход умножителя 6-5. Выходной сигнал умножителя 6-4, проходя через усилитель 32, пропорционален моменту MZ и поступает на выход вычислителя 27 момента тангажа.
с выхода дифференциатора 5-2, поступает на второй вход умножителя 6-2. Выходной сигнал умножителя 6-13, на второй вход которого поступает сигнал с умножителя 6-2, поступает на второй вход умножителя 6-5. Выходной сигнал умножителя 6-4, проходя через усилитель 32, пропорционален моменту MZ и поступает на выход вычислителя 27 момента тангажа.
Блок 26 управления работает следующим образом. Сигнал, пропорциональный углу δП отклонения предкрылков, поступает на первый вход блока 26 управления и далее на входы блоков 22-4, 22-5, 22-6 сравнения. Блоки 22-4, 22-5, 22-6 сравнения настроены соответственно на три возможных основных диапазона значений углов δП отклонения предкрылков механизации крылы: средний, нулевой и максимальный. Сигнал, пропорциональный углу δЗ отклонения закрылков, поступает на второй вход блока 26 управления и далее на входы блоков 22-7, 22-8, 22-9, 22-10 сравнения. Блоки 22-9, 22-7, 22-8, 22-10 сравнения настроены соответственно на четыре возможных основных диапазона значений углов δЗ отклонения закрылков механизации крыла: нулевой, минимальный, средний и максимальный. Пороги срабатывания блоков 22-4, 22-5, 22-6, 22-7, 22-8, 22-9, 22-10 сравнения перекрывают все диапазоны возможных значений соответственно углов δП,δЗ отклонения предкрылков и закрылков крыла. Основные комбинации углов δП,δЗ отклонений предкрылков и закрылков выделяются с помощью схем 35-1, 35-2, 35-3, 35-4 И. Эти комбинации влияют на значения переменных аэродинамических коэффициентов, реализованных в вычислителе 27 момента тангажа, В случае, если сигнал, пропорциональный углу δП отклонения предкрылков, находится в среднем диапазоне значений и приводит к срабатыванию блока 22-4 сравнения, а сигнал пропорциональный углу δЗ отклонения закрылков, находится также в среднем диапазоне значений и приводит к срабатыванию блока 22-8 сравнения, то выходные сигналы блоков 22-4, 22-8 сравнения, поступив на входы схемы 35-1 И, приведут к появлению сигнала на ее выходе. Этот сигнал поступает на первый выход шины и управления - выход блока 26 управления. Сигнал на первом выходе шины и управления соответствует взлетной конфигурации крыла самолета и соответствующим значениям переменных аэродинамических коэффициентов в вычислителе 27 момента тангажа. Если сигнал, пропорциональный углу δП отклонения предкрылков, находится в среднем диапазоне значений и приводит к срабатыванию блока 22-4 сравнения, а сигнал, пропорциональный углу δЗ отклонения закрылков, находится в минимальном диапазоне значений и приводит к срабатыванию блока 22-7 сравнения, то выходные сигналы блоков 22-4, 22-7 сравнения, поступив на входы схемы 35-2 И, приведут к появлению сигнала на ее выходе. Этот сигнал поступает на второй выход шины и управления - выход блока 26 управления. Сигнал на втором выходе шины и управления соответствует конфигурациям набора высоты и захода на посадку крыла самолета и соответствующим значениям переменных аэродинамических коэффициентов в вычислителе 27 момента тангажа. Если сигнал, пропорциональный углу δП отклонения предкрылков, находится в минимальном диапазоне значений и приводит к срабатыванию блока 22-5 сравнения, а сигнал, пропорциональный углу δЗ отклонения закрылков, находится в нулевом диапазоне значений и приводит к срабатыванию блока 22-9 сравнения, то выходные сигналы блоков 22-5, 22-9 сравнения, поступив на входы схемы 35-3 И, приведут к появлению сигнала на ее выходе. Этот сигнал поступает на третий выход шины и управления - выход блока 26 управления. Сигнал на третьем выходе шины и управления соответствует крейсерской конфигурации крыла самолета и соответствующим значениям переменных аэродинамических коэффициентов в вычислителе 27 момента тангажа. Если сигнал, пропорциональный углу δП отклонения предкрылков, находится в максимальном диапазоне значений и приводит к срабатыванию блока 22-6 сравнения, а сигнал, пропорциональный углу δЗ отклонения закрылков, находится также в максимальном диапазоне значений и приводит к срабатыванию блока 22-10 сравнения, то выходные сигналы блоков 22-6, 22-10 сравнения, поступив на входы схемы 35-4 И, приведут к появлению сигнала на ее выходе. Этот сигнал поступает на четвертый выход шины и управления - выход блока 26 управления. Сигнал на четвертом выходе шины управления соответствует посадочной конфигурации крыла самолета и соответствующим значениям переменных аэродинамических коэффициентов в вычислителе 27 момента тангажа.
Блок 29-1,... 29-17 переменного коэффициента работает следующим образом. Сигнал, пропорциональный параметру а, Н, М полета или углу  отклонения аэродинамической поверхности, поступает на первый сигнальный вход блока 29-1,...,29-17 переменного коэффициента и далее на пятый вход усилителя 36-2 с переменным коэффициентом усиления и квадратор 31-2. На первый, второй, третий, четвертый управляющие входы усилителей 36-1, 36-2, 36-3 с переменным коэффициентом усиления по шине и управления поступают сигналы со второго управляющего входа блока 29-1,...,29-17 переменного коэффициента. Они формируются в блоке 26 управления и зависят от конфигурации крыла. На пятый сигнальный вход усилителя 36-1 с переменным коэффициентом усиления поступает постоянный сигнал с выхода источника 33-3 постоянного сигнала. При поступлении управляющего сигнала на один из управляющих входов усилителя 36-1 с переменным коэффициентом усиления его выходной сигнал изменяется так, чтобы соответствовать значению α0,j коэффициента аппроксимирующего полинома (24). С выхода усилителя 36-1 с переменным коэффициентом усиления сигнал поступает на первый вход сумматора 4-3. Синхронно выходной сигнал усилителя 36-2 с переменным коэффициентом усиления будет формировать зависимое от параметра х и управляющего сигнала на одном из управляющих входов значение α1,j х коэффициента аппроксимирующего полинома (24), который поступает на второй вход сумматора 4-3. Синхронно по входному сигналу на пятом сигнальном входе усилителя 36-3 с переменным коэффициентом усиления, поступившему с выхода квадратора 31-2, будет формироваться сигнал, зависимый от квадрата параметра х2 и управляющего сигнала на одном из управляющих входов, значение α2,j х2 коэффициента аппроксимирующего полинома (24), который поступает на третий вход сумматора 4-3. Сумматор 4-3 объединяет три составляющие аппроксимирующего полинома (24), и на его выходе получается сигнал, пропорциональный составляющей переменного коэффициента момента.
отклонения аэродинамической поверхности, поступает на первый сигнальный вход блока 29-1,...,29-17 переменного коэффициента и далее на пятый вход усилителя 36-2 с переменным коэффициентом усиления и квадратор 31-2. На первый, второй, третий, четвертый управляющие входы усилителей 36-1, 36-2, 36-3 с переменным коэффициентом усиления по шине и управления поступают сигналы со второго управляющего входа блока 29-1,...,29-17 переменного коэффициента. Они формируются в блоке 26 управления и зависят от конфигурации крыла. На пятый сигнальный вход усилителя 36-1 с переменным коэффициентом усиления поступает постоянный сигнал с выхода источника 33-3 постоянного сигнала. При поступлении управляющего сигнала на один из управляющих входов усилителя 36-1 с переменным коэффициентом усиления его выходной сигнал изменяется так, чтобы соответствовать значению α0,j коэффициента аппроксимирующего полинома (24). С выхода усилителя 36-1 с переменным коэффициентом усиления сигнал поступает на первый вход сумматора 4-3. Синхронно выходной сигнал усилителя 36-2 с переменным коэффициентом усиления будет формировать зависимое от параметра х и управляющего сигнала на одном из управляющих входов значение α1,j х коэффициента аппроксимирующего полинома (24), который поступает на второй вход сумматора 4-3. Синхронно по входному сигналу на пятом сигнальном входе усилителя 36-3 с переменным коэффициентом усиления, поступившему с выхода квадратора 31-2, будет формироваться сигнал, зависимый от квадрата параметра х2 и управляющего сигнала на одном из управляющих входов, значение α2,j х2 коэффициента аппроксимирующего полинома (24), который поступает на третий вход сумматора 4-3. Сумматор 4-3 объединяет три составляющие аппроксимирующего полинома (24), и на его выходе получается сигнал, пропорциональный составляющей переменного коэффициента момента.
Как следует из вышеизложенного, достижение технического результата полетного контроля веса нагрузки самолета обеспечивается введением в устройство, принятое за прототип и содержащее датчик скорости тангажа, датчик скорости крена, датчик скорости рыскания, сумматор, дифференциатор, умножитель и функциональный преобразователь, блока определения момента тангажа, датчика угла атаки, датчика числа Маха, датчика скорости, датчика высоты, датчика углов отклонения интерцепторов, датчика углов отклонения закрылков, датчика углов отклонения предкрылков, датчика углов отклонения щитков, датчика углов отклонения руля высоты, датчика углов отклонения стабилизатора, датчика центровки, датчика выпуска шасси, блока памяти, делителя, первого, второго, третьего блоков сравнения, схемы ИЛИ, коммутатора со связями, указанными в формуле изобретения. Сопоставление параметров, характеризующих заявляемое изобретение и прототип, позволяет сделать вывод, что в отличие от прототипа и аналогов, которые не способны контролировать вес нагрузки в полете, заявляемое устройство определяет его текущее значение. Для практических задач полета контроль веса нагрузки проводится с точностью 3-5% [21, 22]. Устройство не содержит большого числа дополнительных, в том числе прецизионных, как в системе WSB [5, 6], датчиков, а использует штатные датчики пилотажно-навигационного комплекса самолета [12, 15, 16]. Основная реализация устройства заключается в программной обработке выходных сигналов этих датчиков. Кроме указанного достигаемого технического результата и преимуществ заявленного устройства следует отметить также дополнительные его достоинства. Это прежде всего возможность создания с заявляемым устройством интегральных систем оптимизации режимов полета [1, с.111-113; 21, с.3, 58, 95-96, 100-101; 22, с.79, 85, 96-97; 23, с.9; 24; 25], в котороых высота, скорость, дальность, тяга двигателя, расход топлива, взлетные дистанции, заправка топливом и его послеполетный остаток зависят от текущего веса самолета. Применение устройства позволяет сократить время подготовки к полету за счет подготовительных операций по оценке веса груза взвешиванием как для пассажирских, так и для грузовых самолетов. Это улучшает регулярность полетов и коммерческую эффективность авиакомпаний [26, с.5-10]. Актуально применение заявляемого устройства и для ведения независимого объективного контроля загрузки самолета при записи информации о текущем весе груза в бортовой регистратор полетной информации. Это упростит процедуру технического и страхового расследования летных происшествий из-за перегруза самолета, даже если самолет и груз полностью уничтожены при падении [27, 28]. Широкое применение контейнерных и транзитных перевозок на неприспособленных для взвешивания грузов аэродромах позволяет оперативно вести контроль груза при дополнительной его погрузке и выгрузке, дозаправке топливом на промежуточных точках маршрута. Повышение оперативности грузовых перевозок возможно сократит аэродромные сборы и время задержек рейсов из-за контроля веса самолета. Совместное применение заявляемого устройства [7] для полетного контроля веса нагрузки и прототипа-устройства для определения величины и направления смещения центра масс позволит создать комплексную автономную бортовую систему контроля веса и центровки самолета [2, 6] без дополнительных дорогостоящих датчиков на борту самолета. Необходимые для системы датчики уже имеются на самолете.
Таким образом, приведенные сведения доказывают, что при осуществлении заявленного изобретения выполняются следующие условия:
- средство, воплощяющее устройство-изобретение при его осуществлении, предназначено для использования в авиационной технике и, в частности, для комплексного контроля систем управления пассажирских и транспортных самолетов классической схемы. Оно может использоваться для определения в полете текущего веса коммерческой нагрузки самолета;
- для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью описанных или других известных до даты подачи заявки средств;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить получение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности ″промышленная применимость″.
Источники информации
1. Лигум Т.И. Аэродинамика и динамика полета турбореактивных самолетов. М.: Транспорт, 1972. 320 с.
2. Аралов Г.Д., Ширяев Д.А. К проблеме ограничения объема грузовых кабин // Проблемы безопасности полетов. 2001. №11. С.20-22.
3. Летные испытания самолетов / К.К.Васильченко, В.А.Леонов, И.М.Пашковский, Б.К.Поплавский. М.: Машиностроение, 1996. 720 с.
4. Mobile Weight Measuring Aviation Complex VAK 30-250. Проспект фирм Motor Sich, Pulsar-92, XAI. MAKC-2001.
5. Бортовая система измерения массы и центровки самолета. Э.И. Авиастроение, №28, 1986. С.25. О,Brien Games P. Recent advances in aircraft on-board weight and balance systems. "Proc.AIAA/IEEE 6th Digital Avionics Syst. Conf, Baltimore, Md, 198, New York, N.Y., 1984, p.47-53.
6. Лопаткин В.И. Бортовые системы контроля веса и центровки самолета // Проблемы безопасности полетов. 1989. №10. С.22-38.
7. Пат. 2176810 РФ. МКИ 23/00. Способ и устройство для определения величины и направления смещения центра масс аппарата / В.Ю.Чернов // Б.И. 2001, №34. (ПРОТОТИП).
8. Динамика полета транспортных летательных аппаратов / Под ред. А.Я.Жукова. М.: Транспорт, 1996. 326 с.
9. Бутенин Н.В., Лунц Я.Л., Меркин Д.Р. Курс теоретической механики. Т.2. М.: Наука, 1971. 464 с.
10. Остославский И.М., Стражева И.В. Динамика полета. Устойчивость и управляемость летательных аппаратов. М.: Машиностроение, 1965. 467 с.
11. Катков М.С. Непрерывные системы адаптивного управления с идентификаторами. М.: МПИ, Мир книги, 1992. 386 с.
12. Кестельман В.Н., Федоров А.В. Механизмы управления самолетом. М.: Машиностроение, 1987. 184 с.
13. Бехтир В.П., Ципенко В.Г. Практическая аэродинамика самолета ИЛ-86. М.: Воздушный транспорт, 1993. 176 с.
14. Авионика России. Энциклопедический справочник / Под общ. Ред. С.Д.Бодрунова, СПб.: Национальная Ассоциация авиаприборостроителей, 1999 г., с.780.
15. Морозов В.В., Баринова Т.В. Приборное оборудование самолета ИЛ-86 и его летная эксплуатация. Ульяновск: МГА. Центр ГА СЭВ, 1989. 79 с.
16. ОКБ Ген. Конструктора Г. Новожилова. Плакаты по приборному оборудованию самолета ИЛ-86. М.: МГА. Воздушный транспорт, 1980.
17. Алексенко А.Г., Коломбет Е.А, Стародуб Г.И. Применение прецизионных аналоговых ИС. М.: Радио и связь, 1981. 224 с.
18. Аналоговые и цифровые интегральные микросхемы: Справочное пособие/ Под ред. С.В.Якубовского. М.: Радио и связь, 1984. 432 с.
19. Цифровые процессоры обработки сигналов: Справочник/ А.Г.Остапенко, С.И.Лавлинский, А.Б.Сушков и др. Под ред. А.Г.Остапенко. М.: Радио и связь, 1994. 264 с.
20. Проектирование цифровых устройств на однокристальных микропроцессорах/В.В.Сташин, А.В.Урусов, О.Ф.Мологонцев. М.: Энергоатомиздат, 1990. 224 с.
21. Зайцева Н.Н. Пассажирский самолет ЭРБАС ИНДАСТРИ A310. М.: ЦАГИ, 1990. 115 с.
22. Зайцева Н.Н. Пассажирский самолет ЭРБАС ИНДАСТРИ А320. М.: ЦАГИ, 1993. 104 с.
23. Ильин В. МНПК ″Авионика″ вчера, сегодня, завтра //Вестник авиации и космонавтики. 2002. №3. С.8-9.
24. Аралов Г.Д. Высокоэкономичные транспортные самолеты нового поколения: Обзор по материалам иностр. печати / Научи, редактор С.Ю.Скрипниченко. М.: ЦНТИ Гражд. Авиации, 1982. 52 с
25. Шейнин В.М. Весовая и транспортная эффективность транспортных самолетов. М.: Оборонгиз, 1962. 363 с.
26. Э.И. Воздушный транспорт. Зарубежный опыт. М.: МГА, №24, 1985. С.5-10.
27. Тополь С. Самолет не дотянул до взлета // Коммерсантъ. 2001. №124. 17.07.01.
28. Вайсберг И. Безопасность полетов в гражданской авиации стран СНГ: Итоги десятилетия//Авиапанорама. 2002, март-апрель. С.31-35.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА ТОПЛИВА САМОЛЕТА | 2008 |
|
RU2377507C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2380279C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В ПРОДОЛЬНОМ КАНАЛЕ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ | 2022 |
|
RU2833735C2 |
| ВЫЧИСЛИТЕЛЬ КОРРЕКТИРУЮЩИХ ФУНКЦИЙ | 2002 |
|
RU2225992C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2537201C2 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С КОМПЛЕКСНЫМ НАВИГАЦИОННЫМ УСТРОЙСТВОМ | 1994 |
|
RU2046736C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОГО САМОЛЕТА | 1995 |
|
RU2084375C1 |
| СПОСОБ КОНТРОЛЯ ДАТЧИКОВ СИСТЕМЫ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2664128C1 |
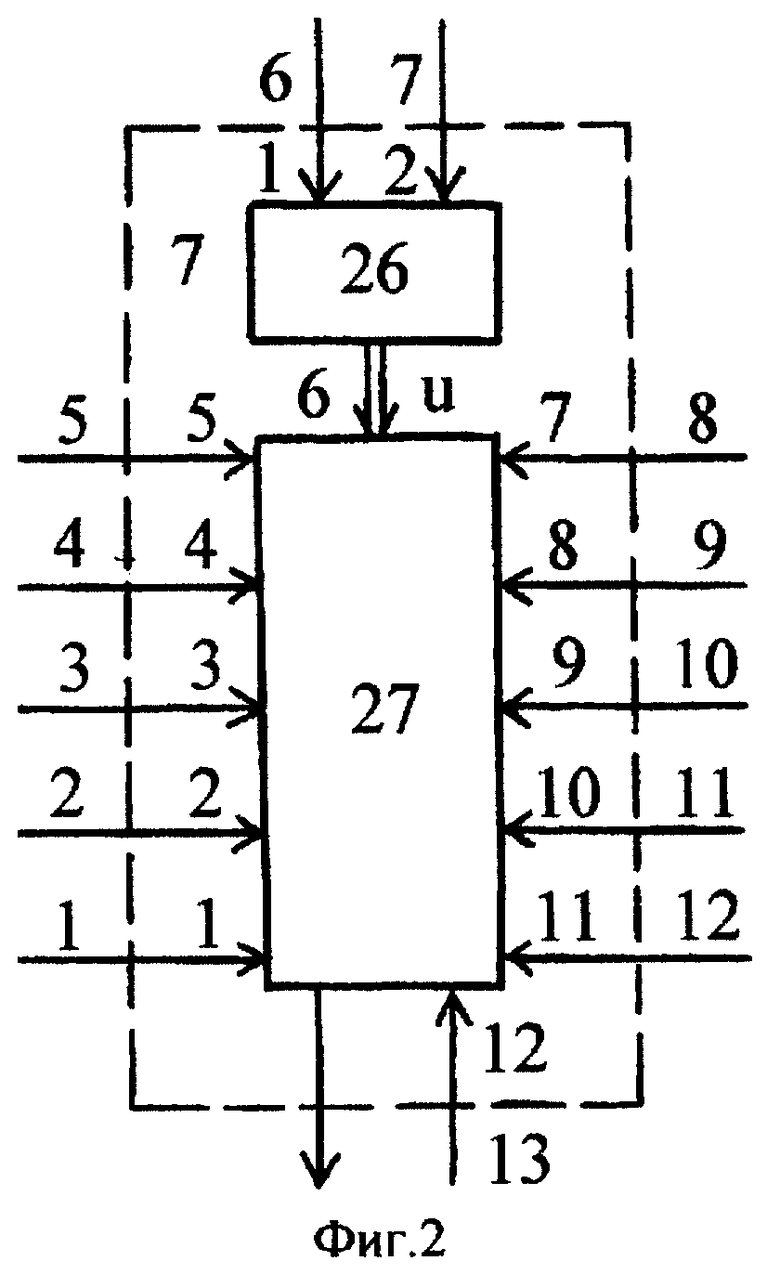


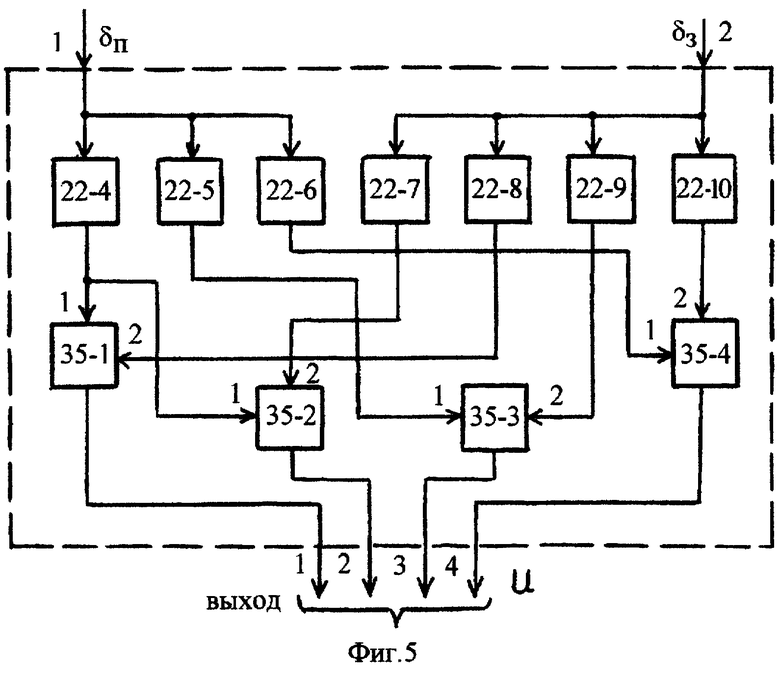
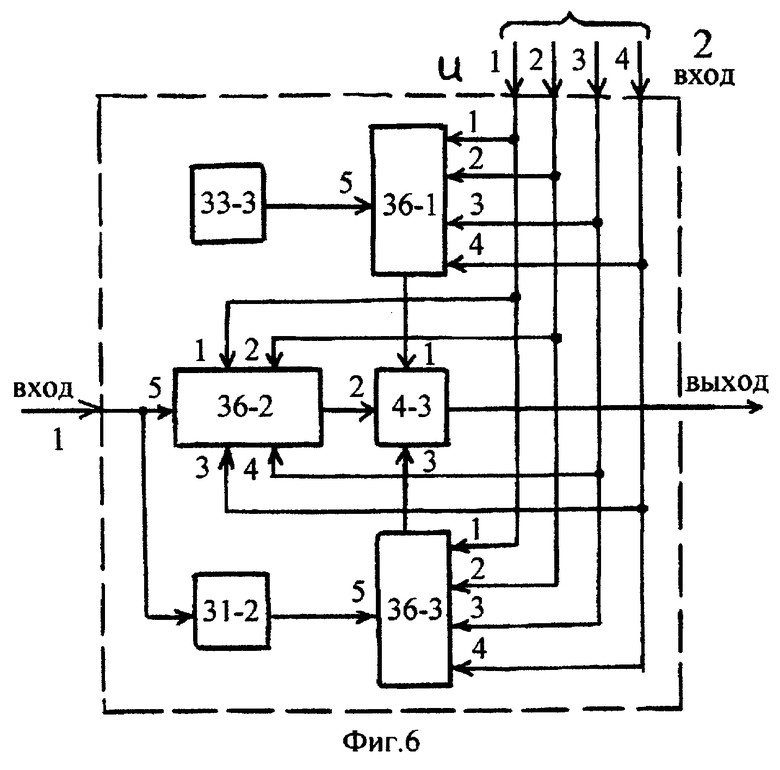
Изобретение относится к области авиационной техники и, в частности, к системам комплексного контроля веса и центровки пассажирских и транспортных самолетов классической схемы, у которых топливо расположено в крыле, а нагрузка - в фюзеляже, и может быть использовано для определения в полете текущего значения веса коммерческой нагрузки и оперативного управления аэродинамическими характеристиками: дальностью, высотой, скоростью. Технический результат изобретения заключается в повышении точности и достоверности оценки в полете действительного веса нагрузки. Устройство содержит датчики скоростей тангажа, крена, рыскания, угла атаки, высоты, скорости, числа М и углов отклонения аэродинамических поверхностей самолета. В блоке определения момента тангажа проводится вычисление текущего значения момента тангажа, действующего на самолет. Одновременно определяется его угловое ускорение по тангажу. Вес нагрузки самолета определяется по известной функциональной связи с моментом инерции по поперечной оси связанной системы координат. Контроль веса реализован в устройстве сравнения. 5 з.п. ф-лы, 6 ил.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЗЛЕТНОЙ МАССЫ САМОЛЕТА | 2001 |
|
RU2196967C2 |
| RU 94008936 A1, 10.01.1996 | |||
| US 4110605 A, 29.08.1978 | |||
| Приспособление для проточки опорных буртиков овальных лючков в коллекторах паровых котлов | 1948 |
|
SU82663A1 |

