Изобретение относится к метеорологии к способам для определения физических параметров атмосферы и позволяет получать информацию о высоте нижней границы облачности путем измерения расстояния до выбранного в качестве объекта измерения фрагмента облачности.
Известен способ определения высоты нижней границы облачности [1] принятый за прототип, заключающийся в следующем. С помощью двух фотоприемников, расположенных на земной поверхности, ориентированных в зенит и разнесенных на расстояние d друг от друга, одновременно получают два изображения с точкой интереса, расположенной на основании облака, которую можно однозначно идентифицировать на изображениях, определяют по изображениям зенитные θ1 и θ2 и азимутальные ϕ1 и ϕ2 углы точки интереса и определяют высоту нижней границы облачности по формуле
 .
.
Недостатком такого способа является использование двух фотоприемников, разнесенных на расстояние d, зависящее от требуемой точности измерения, что существенно усложняет процесс измерения высоты нижней границы облачности и делает неудобным эксплуатацию используемого оборудования.
Задачей, на решение которой направлено данное изобретение, является использование для измерения высоты нижней границы облачности только одного фотоприемника. Технический результат - упрощение процесса измерения высоты нижней границы облачности и повышение удобства эксплуатации используемого оборудования.
Указанный технический результат достигается тем, что с помощью фотоприемников, расположенных на земной поверхности и ориентированных в зенит, получают изображения с точкой интереса, расположенной на основании облака, которую можно однозначно идентифицировать на изображениях. В отличие от известного, в предлагаемом способе с помощью одного фотоприемника через определенные промежутки времени получают изображения с точкой интереса, расположенной на основании равномерно движущегося облака, определяют по изображениям линейные y1' и y2' и угловые α1 и α2 размеры видимого смещения точки интереса, зенитные углы линий визирования β1 и β2 точки интереса и зенитный угол δ видимого смещения точки интереса, после чего определяют высоту нижней границы облачности по формуле
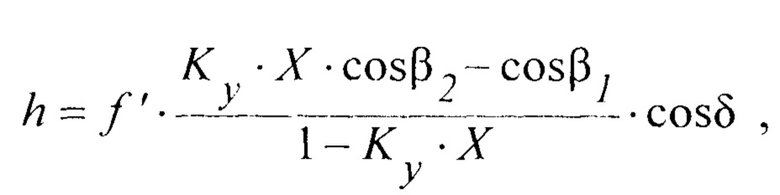
где  фокусное расстояние оптической системы фотоприемника,
фокусное расстояние оптической системы фотоприемника,
 - коэффициент отношения линейных размеров видимого смещения точки интереса,
- коэффициент отношения линейных размеров видимого смещения точки интереса,
 - коэффициент отношения косинусов углов наблюдения точки интереса.
- коэффициент отношения косинусов углов наблюдения точки интереса.
Сравнение заявляемого способа с прототипом позволило установить соответствие их условию "новизна". При сравнении заявляемого способа с другими известными техническими решениями не выявлены сходные признаки, что позволяет сделать вывод о соответствии условию "изобретательский уровень".
Сущность изобретения заключается в следующем. Пусть два предмета АВ и CD одинакового размера у расположены на одной линии с точкой Z и на одном расстоянии α от плоскости наблюдения (параллельны ей) с соответствующими углами отклонения β1 и β2 от перпендикуляра HZ из точки наблюдения H, лежащей на плоскости наблюдения (Фиг. 1).
При этом предмет АВ будет иметь видимый угловой размер α1, что эквивалентно наблюдению предмета АВ1 размером y1, перпендикулярного линии визирования НА и находящегося на расстоянии α1 от точки наблюдения Н, а предмет CD будет иметь видимый угловой размер α2, что эквивалентно наблюдению предмета CD1 размером γ2, перпендикулярного линии визирования НС и находящегося на расстоянии α2 от точки наблюдения Н. Для треугольников АВВ1 и CDD1 по теореме синусов имеем
Кроме того, для треугольников HZA и HZC имеем

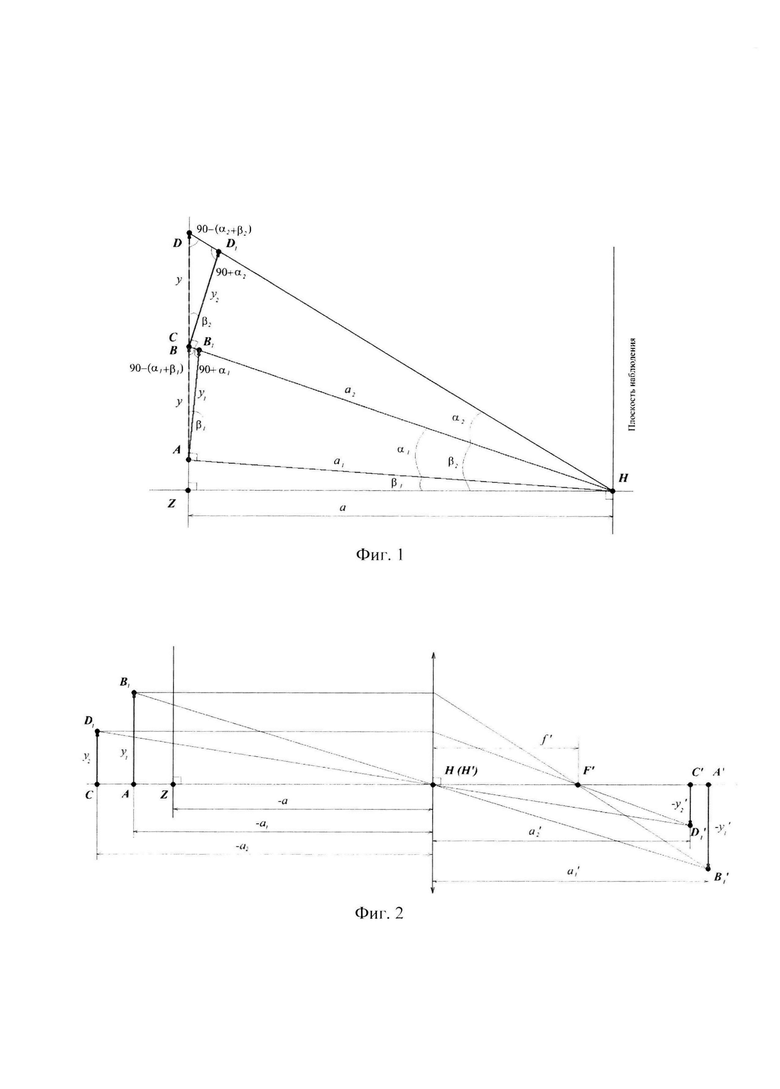
Совместим линии визирования НА и НС с перпендикуляром HZ и положим, что плоскость наблюдения является главной плоскостью оптической системы с фокусным расстоянием  а предметы АВ1 и CD1 размерами y1 и y2 находятся в пространстве предметов на расстоянии соответственно α1 и α2 от главной точки оптической системы Н. Тогда в пространстве изображений будут сформированы изображения
а предметы АВ1 и CD1 размерами y1 и y2 находятся в пространстве предметов на расстоянии соответственно α1 и α2 от главной точки оптической системы Н. Тогда в пространстве изображений будут сформированы изображения  и
и  размерами y1' и y2' (Фиг. 2).
размерами y1' и y2' (Фиг. 2).
Используя законы геометрической оптики в части зависимости между положением и размером предмета и его изображением [2], можно записать

Прировняв (1) и (3) соответственно по y1 и y2 и выразив y, получаем
Приравняв уравнения (4) по у и учитывая (2), получаем

откуда расстояние от главной точки оптической системы И до точки Z определяется как

Способ поясняется примерами.
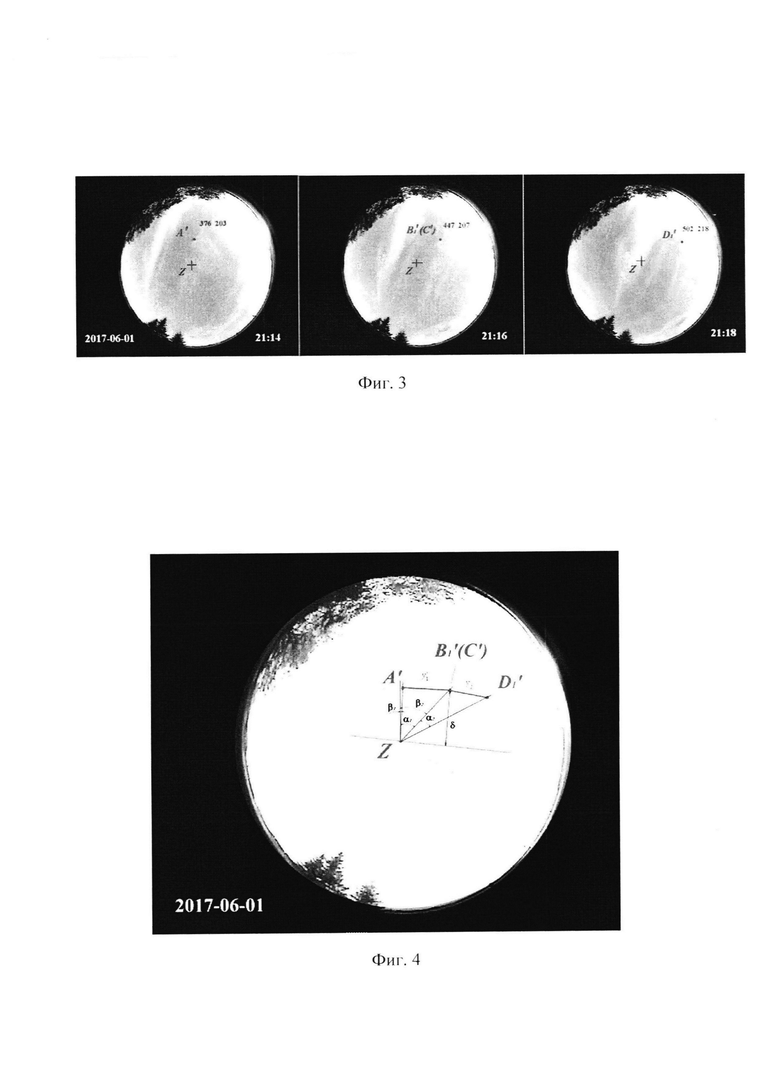
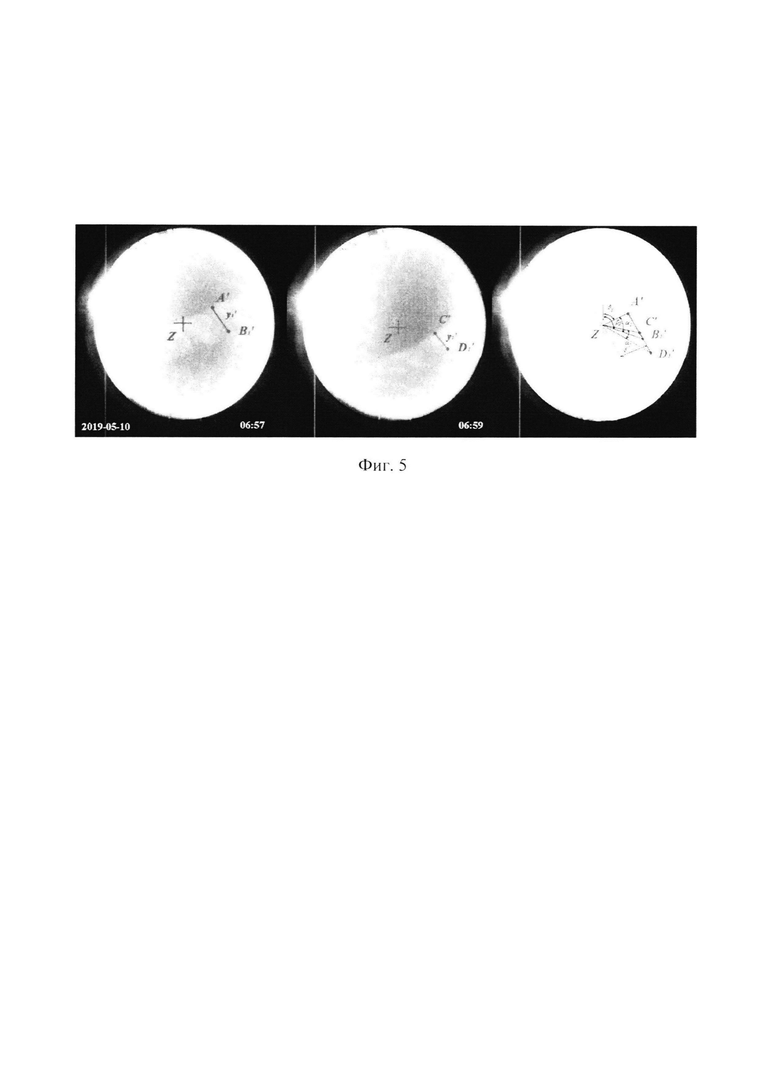
Пример 1. Для определения высоты нижней границы облачности по панорамным изображениям всего небосвода, с помощью цветной телевизионной камеры МВК-1653ц (БайтЭрг, Россия) через равные промежутки времени получаем три изображения с одной точкой интереса, расположенной на основании равномерно движущегося облака (Фиг. 3), видимое смещение которой образует изображения  и
и  с общей точкой
с общей точкой  размерами y1' и y2' (Фиг. 4). Определив углы α1, α2, β1, и β2 по (6) определяем расстояние α, а высоту нижней границы облачности определяем как
размерами y1' и y2' (Фиг. 4). Определив углы α1, α2, β1, и β2 по (6) определяем расстояние α, а высоту нижней границы облачности определяем как

где δ - зенитный угол видимого смещения точки интереса.
Пример 2. Для определения высоты нижней границы облачности по панорамным изображениям всего небосвода, с помощью цветной телевизионной камеры МВК-1653ц (БайтЭрг, Россия) через равные промежутки времени получаем два изображения с двумя точками интереса, расположенными на основании равномерно движущегося облака (Фиг. 5) и образующими собой изображения  и
и 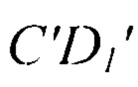 размерами y1' и y2' одного и того же протяженного объекта. Определив углы α1, α2, β1, β2 и δ по (6) и (7) рассчитываем высоту нижней границы облачности h.
размерами y1' и y2' одного и того же протяженного объекта. Определив углы α1, α2, β1, β2 и δ по (6) и (7) рассчитываем высоту нижней границы облачности h.
Таким образом, предлагаемый способ позволяет получать информацию о высоте нижней границы облачности как о расстоянии от плоскости наблюдения до точек интереса, расположенных на основании равномерно движущегося облака. Преимущество изобретения состоит в том, что процесс измерения высоты нижней границы облачности упрощается за счет использования только одного фотоприемника и повышается удобство эксплуатации используемого оборудования.
Использованные источники
1. Allmen М., Kegelmeyer W. The computation of cloud-base height from paired whole-sky imaging cameras. Journal of Atmospheric and Oceanic Technology (1996) 13(1)97-113.
DOI:10.1175/1520-0426(1996)013<0097:TCOCBH>2.0.CO;2.
2. Заказное H. П. Прикладная геометрическая оптика. M.: Машиностроение, 1984. - 184 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОСТАТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ НИЖНЕЙ ГРАНИЦЫ ОБЛАЧНОСТИ | 2008 |
|
RU2377612C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ГРАНИЦ ОБЪЕКТА | 2017 |
|
RU2656130C1 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕГО ОПТИЧЕСКОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТЯЩЕГО В СТРАТОСФЕРЕ ИЛИ НА БОЛЬШОЙ ВЫСОТЕ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО КРИТЕРИЯМ КОНДЕНСАЦИОННОГО СЛЕДА ЕГО СИЛОВОЙ УСТАНОВКИ В АТМОСФЕРЕ | 2012 |
|
RU2536769C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И УГЛОВОЙ ОРИЕНТАЦИИ ТЕЛЕЖКИ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2303240C1 |
| СПЕКТРОРАДИОМЕТРИЧЕСКИЙ СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЛАКОВ ТОКСИЧНЫХ ГАЗООБРАЗНЫХ ВЕЩЕСТВ В АТМОСФЕРЕ | 2011 |
|
RU2478995C1 |
| ГОЛОГРАФИЧЕСКИЙ ПРИЦЕЛ И УСТРОЙСТВО ЗАПИСИ ГОЛОГРАММЫ ПРИЦЕЛЬНОГО ЗНАКА | 2007 |
|
RU2352890C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ОБЛАЧНОСТИ | 2014 |
|
RU2583877C2 |
| СПОСОБ ЛОКАЛИЗАЦИИ ВКЛЮЧЕНИЙ В АЛМАЗЕ | 2001 |
|
RU2263304C2 |
| СПОСОБ ЛОКАЛИЗАЦИИ ВКЛЮЧЕНИЙ В АЛМАЗЕ | 2001 |
|
RU2391647C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕФТЕГАЗОВОДОНАСЫЩЕННОСТИ КОЛЛЕКТОРА | 1999 |
|
RU2153183C1 |
Изобретение относится к области метеорологии и может быть использовано для определения высоты нижней границы облачности. Сущность: с помощью фотоприемника, расположенного на земной поверхности и ориентированного в зенит, получают три изображения с одной точкой интереса. Причем указанная точка интереса расположена на основании равномерно движущегося облака и ее можно однозначно идентифицировать на изображениях. По полученным изображениям определяют линейные и угловые размеры видимого смещения точки интереса, зенитные углы линий визирования точки интереса и зенитный угол видимого смещения точки интереса. По определенным параметрам рассчитывают высоту нижней границы облачности. Технический результат: упрощение определения высоты нижней границы облачности. 5 ил., 2 пр.
Моноскопический способ определения высоты нижней границы облачности, позволяющий с помощью фотоприемника, расположенного на земной поверхности и ориентированного в зенит, получать изображения с точкой интереса, расположенной на основании облака, которую можно однозначно идентифицировать на изображениях, отличающийся тем, что через определенные промежутки времени получают три изображения с одной точкой интереса, расположенной на основании равномерно движущегося облака, определяют по изображениям линейные y1' и y2' и угловые α1 и α2 размеры видимого смещения точки интереса, зенитные углы линий визирования β1 и β2 точки интереса и зенитный угол δ видимого смещения точки интереса, после чего определяют высоту нижней границы облачности по формуле
где  - фокусное расстояние оптической системы фотоприемника,
- фокусное расстояние оптической системы фотоприемника,
 - коэффициент отношения линейных размеров видимого смещения точки интереса,
- коэффициент отношения линейных размеров видимого смещения точки интереса,
 - коэффициент отношения косинусов углов наблюдения точки интереса.
- коэффициент отношения косинусов углов наблюдения точки интереса.
| МОНОСТАТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ НИЖНЕЙ ГРАНИЦЫ ОБЛАЧНОСТИ | 2008 |
|
RU2377612C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ, НАПРАВЛЕНИЯ И СКОРОСТИ ДВИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ОБЛАЧНОСТИ | 2006 |
|
RU2321029C1 |
| С.В.Зуев | |||
| Моностатический оптико-электронный измеритель высоты нижней границы облачности | |||
| Автореф | |||
| диссер | |||
| на соискание уч | |||
| степ | |||
| кандидата технических наук, г | |||
| Томск, 2014. | |||

