Изобретение относится к области пеленгующих устройств, использующих приборы, преобразующие электромагнитное излучение в электрический сигнал, несущий информацию об изображении, размещаемых на подвижном основании.
Примерами таких приборов могут служить, например, субмиллиметровые телескопы, теплопеленгаторы, тепловизоры, телекамеры, визуализаторы рентгеновского излучения. Как правило, в таких приборах используются одноэлементные или многоэлементные приемники сигнала, а для получения стандартного видеосигнала используется память на кадр или его часть, например, полукадр. Необходимым условием нормальной работы таких приборов является стабилизация изображения.
Известно устройство для стабилизации изображения, в котором на корпус оптико-электронного прибора устанавливают силовые гироскопы, которые при воздействии качек обеспечивают удержание прибора в установленном направлении за счет развиваемого ими гироскопического момента [1, стр.95]. Недостатком этого устройства является необходимость использования гироскопов с высоким кинетическим моментом, которые имеют большую массу и габариты.
Известно также устройство, описанное в [2]. В этом устройстве в оптическую систему оптико-электронного прибора устанавливают подвижный оптический элемент, позволяющий смещать формируемое изображение относительно устройства, преобразующего электромагнитное излучение в электрический сигнал. Перемещение подвижного оптического элемента осуществляют с помощью управляемого привода. Недостатком такого способа стабилизации изображения является то, что дополнительный подвижный оптический элемент вносит потери в прохождение потока излучения и тем самым ухудшает пороговую чувствительность оптико-электронного прибора. Кроме того, наличие дополнительного привода усложняет конструкцию оптико-электронного прибора.
В [3, стр.76-79] описан стабилизатор изображения, в котором из изображения выделяются неподвижные реперные точки, осуществляется их привязка к растру, в каждом полукадре определяется их положение и за счет сигнала смещения на отклоняющую систему, пропорционального изменению положения реперных точек относительно первоначального, положение центра растра, остается стабильным в пространстве. Этот стабилизатор обладает следующими недостатками: во-первых, изображение должно быть типовым и располагаться на постоянном от оптико-электронного прибора расстоянии либо оптико-электронный прибор должен иметь систему регулирования фокусного расстояния, которая обычно увеличивает массу прибора и ухудшает его оптические характеристики; во-вторых, для выделения реперных точек требуется достаточно сложная аппаратура для обработки видеосигнала; в-третьих, при достаточно большой амплитуде качек часть реперных точек может выйти за пределы растра, что может сорвать дальнейший процесс стабилизации, в-четвертых, смещение можно осуществить только в следующем кадре (полукадре), то есть возникает ошибка стабилизации изображения из-за дискретности обновления информации о смещении.
Еще одним вариантом стабилизатора изображения является cтабилизатор, описанный в [4] . В оптико-электронной системе по этой заявке перемещение измеряется с помощью акселерометра (измерителя смещения), а соответствующая коррекция изображения осуществляется за счет изменения порядка считывания элементов с матрицы приборов с зарядовой связью (ПЗС). Но эта система может быть применена лишь в приборах, где в качестве преобразователя излучения в электрический сигнал используются ПЗС приемники.
Наиболее близкой к заявляемому техническому решению является система, предложенная в [5]. Она состоит из телекамеры (оптико-электронного прибора), установленной на платформе, кинематически связанной с двигателями и датчиками сдвига (измерителями смещения). На двигатели подаются сигналы управления, сформированные каналом слежения. Имеется также блок накопления и смещения изображения, вход данных которого соединен с видеовыходом телекамеры, а входы формирователя адреса записи - с выходами датчиков сдвига. Вход канала слежения соединен с выходом блока накопления и смещения изображения. В этом случае для стабилизации изображения измеряют смещение оптико-электронного прибора (телекамеры), для каждого элемента изображения определяют адрес в блоке накопления и смещения изображения с учетом измеренного смещения, записывают элементы изображения в соответствии с полученными адресами, а считывание элементов изображения осуществляют в обычной последовательности, соответствующей развертке растра. Для облегчения условий работы канала слежения (телевизионного автомата) производится вычитание из текущего сигнала накопленного значения. Недостатком этой системы является то, что, хотя фон становится и более гладким, отношение сигнал/шум для самого объекта, за которым ведется наблюдение, не увеличивается. Более того, при перемещении объекта относительно оптической оси за его изображением будет тянуться след (см. , например, [6] , стр. 209-212), искажающий его образ, а при малоподвижном объекте уровень полезного сигнала от него будет уменьшаться. Не подавляются при такой обработке видеосигнала и подвижные помеховые образования. В результате создаются дополнительные трудности как для работы канала слежения, так и оператору для наблюдения за процессом слежения.
Задачей предлагаемого изобретения является увеличение дальности действия оптико-электронного пеленгатора, повышение точности определения координат изображения объекта, повышение помехозащищенности пеленгатора. Кроме того, уменьшается необходимый для работы устройства объем памяти.
Для решения указанной задачи в оптико-электронный пеленгатор, содержащий измеритель смещения и последовательно соединенные оптико-электронный прибор, блок накопления и смещения и телевизионный автомат, введены последовательно соединенные сумматор и формирователь адресов поля анализа, при этом первый вход сумматора соединен с выходом телевизионного автомата, второй вход сумматора соединен с выходом измерителя смещения, а выход сумматора соединен также со вторым входом телевизионного автомата, второй вход блока накопления и смещения соединен с выходом формирователя адресов поля анализа.
На чертеже приведена функциональная схема оптико-электронного пеленгатора для одного канала выделения координат.
Пеленгатор состоит из последовательно соединенных оптико-электронного прибора 1 (ОЭП), блока накопления и смещения 2 (БНС), телевизионного автомата 3 (ТА), сумматора 4, формирователя адресов поля анализа 5 (ФАПА), а также измерителя смещения 6 (ИС), выходом соединенного со вторым входом сумматора. Второй вход БНС 2 соединен с выходом ФАПА 5, а второй вход ТА 3 подключен к выходу сумматора 4.
Все используемые устройства являются известными или могут быть получены в результате объединения известных блоков известными методами.
В качестве оптико-электронных приборов могут использоваться субмиллиметровые телескопы, теплопеленгаторы, тепловизоры, телекамеры, визуализаторы рентгеновского излучения и т.п. Телевизионный автомат и блок накопления и смещения могут быть реализованы аналогично тому, как это сделано в прототипе. Сумматор может быть выполнен, как это описано в [7]. Формирователь адресов поля анализа может быть выполнен на базе запоминающего устройства, коды на выходе которого однозначно зависят от комбинации значения сигналов на входах, либо с помощью логических микросхем, выполняющих ту же функцию. Измеритель смещения может выполняться на базе акселерометров, гироскопических датчиков угла, датчиков угловых скоростей, лазерных и волоконно-оптических гироскопов и т.п. Могут использоваться в качестве измерителя смещения и приборы, измеряющие ошибку устройств, обеспечивающих совмещение линии визирования с оптической осью ОЭП.
Стабилизация изображения при предложенном способе осуществляется нижеописанным образом.
Поток электромагнитного излучения поступает на вход оптико-электронного прибора 1, где преобразуется в видеосигнал. Этот видеосигнал подается на вход БНС 2, выходной сигнал которого поступает на первый вход телевизионного автомата 3. Для смещения подвижного поля анализа (строба) на второй вход ТА 3 выдается сигнал. В ТА с использованием корреляционных, контрастных или иных алгоритмов осуществляется определение координат объекта относительно поля анализа и с учетом величины смещения строба - координат объекта относительно растра, которые и подаются на выход телевизионного автомата.
В сумматоре 4 производят суммирование сигналов от измерителя смещения 6 и телевизионного автомата 3. Результат суммирования и используется в качестве сигнала смещения строба. Тот же сигнал подается и на вход формирователя адреса поля анализа 5, который с учетом размеров строба и времени, прошедшего с начала развертки, формирует адреса для последовательности элементов разложения, соответствующей стробу, и выдает их в блок накопления и смещения 2. (Следует отметить, что работа блоков должна быть синхронизирована между собой, при этом синхронизатор может располагаться как внутри одного из них, так и во внешней по отношению к пеленгатору системе.)
БНС представляет собой межкадровый рекурсивный фильтр (см. [8], стр. 432-435). Поскольку задачей пеленгатора является определение координат объекта, а изображение объекта находится внутри поля анализа, накопление сигнала проводится только для элементов, соответствующих стробу. При этом, естественно, даже при наибольшем из возможных полей анализа требуемый объем памяти меньше, чем для запоминания всего кадра. Фрагменты видеосигнала проходят на выход БНС 2 без изменений, если они не принадлежат полю анализа, либо суммируются перед подачей на выход с соответствующими им элементами строба с необходимыми весовыми коэффициентами.
Очевидно, что накопления видеосигнала вне строба не происходит. Рассмотрим подробнее, как обрабатывается информация внутри поля анализа. Если бы смещений оптической оси ОЭП 1 не было, то при слежении за объектом его изображение оказывалось бы в центре строба. Из-за смещений оно оказывается отклоненным. Чтобы учесть это, строб дополнительно сдвигается на величину смещения (с учетом соответствующих законов связи между положением точек в видеосигнале и смещением оптической оси оптико-электронного прибора). Таким образом изображение объекта оказывается застабилизированным относительно центра строба. Поэтому в результате обработки в рекурсивном межкадровом фильтре величина отношения сигнал/шум для изображения объекта будет возрастать. Поскольку объект перемещается относительно фона, в разных кадрах одним и тем же элементам строба будут соответствовать разные элементы фона. В итоге, если фон неоднородный, то в результате обработки произойдет осреднение сигнала от фона внутри поля анализа, если однородный, то уменьшатся шумовые флуктуации. В любом случае в результате улучшаются условия работы телевизионного автомата 3, так как требуется выделить объект с возросшим отношением сигнал/шум на более однородном фоне.
Аналогично, для оптических помех, движущихся относительно растра со скоростью иной, чем скорость изображения объекта: если они находятся вне строба, то их наличие никак не влияет на процесс сопровождения, а если внутри строба, то сигнал от них существенно уменьшается, а образ размазывается. Нахождение же внутри поля анализа помехи, движущейся относительно растра с той же скоростью, что и изображение объекта, крайне маловероятно. Следовательно, повышается помехозащищенность пеленгатора.
Также очевидно, что повышение уровня сигнал/шум от изображения объекта при прочих равных условиях позволяет увеличить дальность сопровождения объекта, так как уменьшение полезного сигнала от объекта до того же порогового значения будет достигаться на входе пеленгатора при больших расстояниях от пеленгатора до объекта.
Одновременное осуществление операций накопления сигнала от объекта и стабилизация его изображения относительно строба позволяют также повысить точность определения координат объекта. Это обусловлено следующими факторами. Как уже отмечалось выше, отсутствие стабилизации и вызванное этим перемещение изображения вызывает изменение образа объекта, а также положения его геометрического центра по отношению к идеально застабилизированному. Эти искажения тем больше, чем выше коэффициент накопления. Поэтому без стабилизации изображения применение системы с межкадровой обработкой информации существенно ухудшает условия для работы телевизионного автомата 3. С другой стороны стабилизация изображения объекта относительно центра поля анализа позволяет повысить точность определения координат в результате того, что, во-первых, уменьшаются динамические ошибки определения координаты практически неподвижного относительно строба изображения объекта, а во-вторых, из-за того, что изображение объекта не приближается к границам строба, и в результате не происходит изменения анализируемого телевизионным автоматом образа вследствие выхода части пикселов, принадлежащих изображению объекта, за границы строба.
Таким образом, применение в оптико-электронном пеленгаторе накопления сигнала в следящем стробе позволяет уменьшить объем памяти, необходимой для межкадровой обработки, повысить помехозащищенность пеленгатора, повысить дальность его действия и уменьшить ошибки определения координат объекта.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Репников А.В., Сачков Г.П., Черноморский А.И. "Гироскопические системы". М., "Машиностроение", 1983, стр.95, аналог.
2. Патент США 4731669, НКИ 358-229 (МКИ H 04 N 5/247, 5/225), 1988, аналог.
3. Петраков А.В. "Автоматические телевизионные комплексы для регистрации быстропротекающих процессов". М., "Энергоатомиздат", 1987, стр. 76-79, аналог.
4. Заявка Великобритании 2162019, НКИ H 4 F (МКИ H 04 N 5/21), 1986, аналог.
5. А.с. СССР 1592956, МКИ H 04 N 7/18, 1988, прототип.
6. Грязин Г.Н. "Оптико-электронные системы для обзора пространства: Системы телевидения". Л. , "Машиностроение", Ленинградское отд-е, 1988, стр. 209-212.
7. Тетельбаум И. И. , Шнейдер Ю.Р. "400 схем для АВМ". М., "Энергия", 1978.
8. Птачек. "Цифровое телевидение. Теория и техника". М., "Радио и связь", 1990, стр.432-435.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СЛЕДЯЩАЯ СИСТЕМА | 2000 |
|
RU2168753C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ | 2001 |
|
RU2212687C2 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2003 |
|
RU2248009C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2172010C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2191407C2 |
| СПОСОБ СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2000 |
|
RU2197070C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
| СПОСОБ СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ, ФОРМИРУЕМОГО ОПТИКО-ЭЛЕКТРОННЫМ ПРИБОРОМ С МЕХАНИЧЕСКОЙ РАЗВЕРТКОЙ, И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2156548C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
Изобретение относится к области пеленгующих устройств, использующих приборы, преобразующие электромагнитное излучение в электрический сигнал, несущий информацию об изображении, и размещаемых на подвижном основании. Техническим результатом является увеличение дальности действия оптико-электронного пеленгатора, повышение точности определения координат изображения объекта, повышение помехозащищенности пеленгатора. Для достижения технического результата в оптико-электронный пеленгатор дополнительно введены сумматор и формирователь адреса строба, позволяющие накапливать сигнал в следящем стробе, что приводит к уменьшению объема памяти, необходимой для межкадровой обработки, и, следовательно, к уменьшению ошибки при определении координат объекта, а также повышению помехозащищенности пеленгатора и дальности его действия. 1 ил.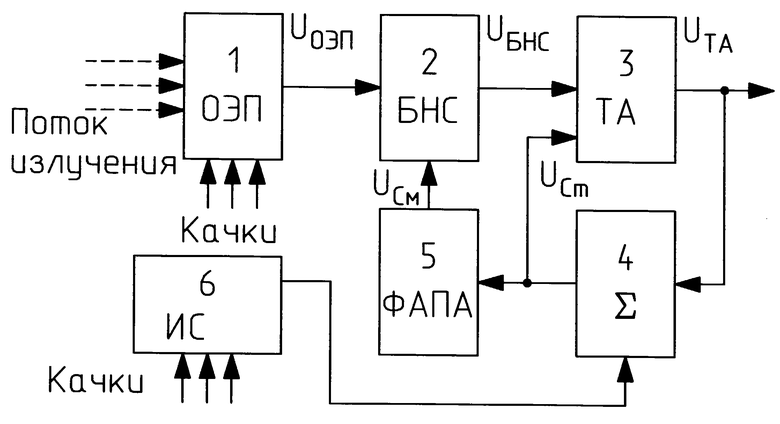
Оптико-электронный пеленгатор, содержащий последовательно соединенные оптико-электронный прибор, блок накопления и смещения изображения и телевизионный автомат, а также измеритель смещения оптико-электронного прибора, отличающийся тем, что введены последовательно соединенные сумматор и формирователь адреса строба, при этом первый вход сумматора соединен с выходом телевизионного автомата, второй вход сумматора соединен с выходом измерителя смещения оптико-электронного прибора, а выход сумматора соединен также со вторым входом телевизионного автомата, второй вход блока накопления и смещения изображения соединен с выходом формирователя адреса строба.
| SU 1592956, 15.09.1990 | |||
| US 4731669 А, 15.03.1988 | |||
| ЗАДНИЙ СТОЛ ПРОШИВНОГО СТАНА | 1998 |
|
RU2162019C2 |
| RU 2052838 С1, 20.01.1996 | |||
| ОПТИКО-ЭЛЕКТРОННЫЙ ПЕЛЕНГАТОР | 1986 |
|
SU1412459A1 |

