Известны устройства для управления измерительными рычагами каверномера, включающие электродвигатель, вал которого через редуктор соединен со штоком, кинематически связанным с измерительными рычагами, и механизм раскрытия измерительны. рычагов.
Цель предлагаемого устройства - повысить эффективность его действия.
Для этого механизм раскрытия измерительных рычагов выполнен в виде рычага, один конец которого шарнирно соединен с корпусом, а другой подпружинен и опирается на муфту, установленную на валу привода и снабгкенную гнездом с наклонным дном и с поменденным в нем шариком.
Кроме того, рычаг механизма раскрытия измерительных рычагов может быть снабжен фиксатором, а шток устройства - гнездом для фиксатора.
На чертеже показано предлагаемое устройство.
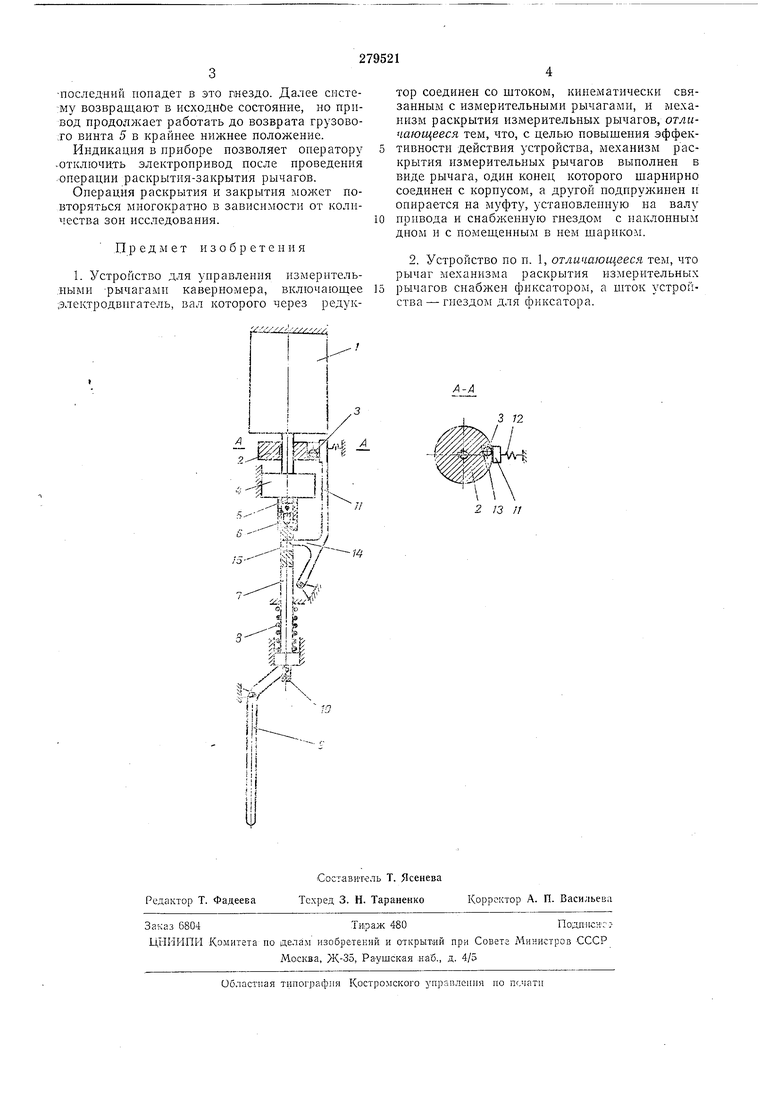
Вал электродвигателя 1, на котором установлена муфта 2 с шариком 3, соединен с редуктором 4, преобразуюндим враш:ателы-юе движение в возвратно-поступательное бесконечного (левая и правая нарезка) грузового винта 5. Винт через муфту 6 связан с силовым штоком 7, который пружиной 8 прижимает выдвигаюшиеся из корпуса прибора измерительные рычаги 9 (на чертеже показан один рычаг) к стенке скважины. Силовой шкок 7 имеет захват 10.
Муфта 2 контактирует с рычагом /У, который прижат к пей пружиной J2, и имеет гнездо
/.3 с наклонным дном, в котором помеиден шарик 3. На рычаге // жестко закреплен фиксатор 14, входящий в гнездо 15, специально для него сделанное в штоке 7.
В исходном состоянии при спуске прибора в
скважину, электродвигатель обесточен, шарик 3 утоплен в гнезде 13, а фиксатор 14 помещен в гнезде 15. Как только прибор достигает зоны исследования, с дневной поверхности подается команда па электродвигатель, вал пачинает вращаться, например, против часовой стрелки, шарик 3 начинает давить иа рычаг 11, сжимая пружину 12. Фиксатор 14 выходит из зацепления со штоком 7. Под действием пружинь 8 шток 7 резко перемещается, обеспечивая раскрытие рычагов 9.
Для закрытия рычагов подается сигнал на электродвигатель п вал вращается по часовой стрелке. Шарик 3 утапливается в гнезде 13, а фиксатор остается прижатым к штоку 7. Редуктор 4 втягивает грузовой винт 5. который через муфту 6 и Шток 7 сжимает пружину 8, и захват 10 закрывает измерительные рычаги 9. При этом фиксатор 14 постоянно прижимается к штоку 7 с помощью подпружиненного рыча
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОКАРНАЯ СИЛОВАЯ ГОЛОВКАт~—^~"I | 1972 |
|
SU346033A1 |
| Устройство для измерения глубины скважины | 1989 |
|
SU1755030A1 |
| Устройство для затяжки резьбовых соединений | 1981 |
|
SU1013253A1 |
| Управляемое прижимное устройство скважинного прибора | 1982 |
|
SU1116145A1 |
| УПРАВЛЯЕМОЕ ПРИЖИМНОЕ УСТРОЙСТВО СКВАЖИННЫХ ГЕОФИЗИЧЕСКИХ ПРИБОРОВ | 1967 |
|
SU200536A1 |
| Устройство для изготовления гиперболоидных контактных узлов Карташева В.В. | 1987 |
|
SU1554058A1 |
| Прижимное устройство скважинного прибора | 1985 |
|
SU1332005A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ МАТЕРИАЛОВ МЕТОДОМ ЦАРАПАНИЯ | 2011 |
|
RU2473881C1 |
| КЛАССИФИКАТОР ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 1971 |
|
SU296180A1 |
| ПОЛУАВТОМАТ ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ПРУЖИНСЖАТИЯ | 1972 |
|
SU328320A1 |
