Изобретение относится к области радиотехники, в частности к системам обработки сигналов в станциях с цифровым синтезированием апертуры антенны, и может быть использовано в бортовых и наземных радиолокационных станциях с инверсным синтезированием апертуры антенны (ИРСА).
В существующих радиолокационных станциях с цифровым синтезированием апертуры антенны интервал синтезирования апертуры Tc имеет фиксированное значение и ограничивается по продолжительности (см. Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные системы дистанционного зондирования Земли) исходя из:
- требуемой разрешающей способности по азимуту δL
где λ - рабочая длина волны; R(t, β) - текущая дальность до объекта наблюдения; Vц - скорость движения наблюдаемого объекта; θн - угол наблюдения объекта.
- допустимой погрешности при квадратичной аппроксимации текущего расстояния R.
где  - производная радиального ускорения;
- производная радиального ускорения;  - среднеквадратическое отклонение (СКО) флуктуации радиального ускорения; Tk - период колебаний конструкции наблюдаемого объекта.
- среднеквадратическое отклонение (СКО) флуктуации радиального ускорения; Tk - период колебаний конструкции наблюдаемого объекта.
Недостатком подхода, при котором продолжительность интервала инверсного синтезирования выбирается жестко фиксированной величиной, является отсутствие «механизма» учета точности формируемой оценки изменения текущей дальности до цели. То есть не учитывается тот факт, что расфокусирование формируемого радиолокационного изображения (РЛИ) может произойти еще до конца интервала инверсного синтезирования и повлечь за собой значительное снижение качества формируемого РЛИ (вплоть до полного разрушения), а следовательно, и потерю его информативности.
Наиболее близким по своей сущности к предлагаемому способу, принятым за прототип, является способ оценки текущей сходимости дискретных фильтров (см. Оценивание дальности и скорости в радиолокационных системах / Меркулов В.И. и др.; под ред. А.И.Канащенкова. - М.: Радиотехника, 2004), по критерию в виде неравенства:

где χB>1 определяется из условия задачи; Δz(k)=z(k)-zm(k) - обновляющий процесс в алгоритме фильтрации; Q - единичная матрица размерных коэффициентов, a tr - операция вычисления следа матрицы.
Сущность способа заключается в том, что при расходимости фильтра резко возрастает отклонение оценки  от ее действительного значения Ek, из-за чего результат прогноза наблюдений
от ее действительного значения Ek, из-за чего результат прогноза наблюдений  представляющий собой модель сигнала, построенную по экстраполированным значениям, будет значительно отличаться от результатов наблюдений z(k). Следовательно, сумма квадратов обновляющего процесса в левой части (3) будет характеризовать действительную ошибку фильтрации. Правая же часть (3) определяет теоретическую точность обновляющего процесса, получаемую на основании априорных сведений о Δz. Если неравенство (3) не выполняется, то реальная ошибка фильтрации более чем в χk раз превышает теоретически рассчитанную, т.е. фильтр расходится. Таким образом, начиная с этого момента, необходимо тем или иным способом корректировать матрицу коэффициентов усиления либо обновляющий процесс.
представляющий собой модель сигнала, построенную по экстраполированным значениям, будет значительно отличаться от результатов наблюдений z(k). Следовательно, сумма квадратов обновляющего процесса в левой части (3) будет характеризовать действительную ошибку фильтрации. Правая же часть (3) определяет теоретическую точность обновляющего процесса, получаемую на основании априорных сведений о Δz. Если неравенство (3) не выполняется, то реальная ошибка фильтрации более чем в χk раз превышает теоретически рассчитанную, т.е. фильтр расходится. Таким образом, начиная с этого момента, необходимо тем или иным способом корректировать матрицу коэффициентов усиления либо обновляющий процесс.
Недостатком способа, принятого за прототип, является тот факт, что неравенство (3) в явном виде может служить достоверным критерием сходимости лишь применительно к линейным системам, так как в них матрица Hk является постоянной и  выражается через произведение
выражается через произведение  В ИРСА фокусирующий фильтр, выполняющий задачу по оценке изменения текущей дальности до наблюдаемой воздушной цели, является нелинейной системой, что не позволяет использовать способ, выбранный за прототип, для обнаружения момента начала расхождения фильтра в интересах фокусировки формируемого радиолокационного изображения.
В ИРСА фокусирующий фильтр, выполняющий задачу по оценке изменения текущей дальности до наблюдаемой воздушной цели, является нелинейной системой, что не позволяет использовать способ, выбранный за прототип, для обнаружения момента начала расхождения фильтра в интересах фокусировки формируемого радиолокационного изображения.
Техническим результатом предлагаемого способа является повышение качества формируемого в ИРСА радиолокационного изображения.
Сущность предлагаемого способа заключается в осуществлении контроля точности оценки изменения текущей дальности до наблюдаемой цели, формируемой в дискретном фокусирующем фильтре, и обнаружении момента появления погрешности, превышающей заданное значение. Согласно предлагаемому способу время инверсного синтезирования апертуры не назначают заранее, а выбирают непосредственно в процессе обработки принимаемого сигнала путем того, что априорно определяют максимально допустимое значение среднеквадратического отклонения величины обновляющего процесса (невязки)  в одном из каналов обработки, в процессе рекуррентной обработки принимаемого сигнала выполняют проверку истинности условия
в одном из каналов обработки, в процессе рекуррентной обработки принимаемого сигнала выполняют проверку истинности условия

при котором значение обновляющего процесса Δz не должно превышать величины трех допустимых, априорно рассчитанных среднеквадратических отклонений  того же самого обновляющего процесса, при нарушении истинности условия (4) подтверждают факт нарушения согласно выбранной логике работы («два из трех» или «три из трех»), принимают решение о достаточности времени инверсного синтеза аппретуры и останавливают процесс инверсного синтезирования.
того же самого обновляющего процесса, при нарушении истинности условия (4) подтверждают факт нарушения согласно выбранной логике работы («два из трех» или «три из трех»), принимают решение о достаточности времени инверсного синтеза аппретуры и останавливают процесс инверсного синтезирования.
Сущность способа выбора оптимальной продолжительности интервала синтезирования в радиолокационной станции с инверсным синтезированием апертуры антенны поясняется следующими расчетами.
В реальных условиях работы ИРСА (фиг.1) принимаемый траекторный сигнал неизбежно подвержен амплитудно-фазовым искажениям различной природы. Причем величина этих искажений в любой момент времени может меняться с различной интенсивностью, обусловленной состоянием турбулентной атмосферы, интенсивностью маневрирования наблюдаемой цели и меняющейся помеховой обстановкой. Это является предопределяющим фактором наличия в фокусирующем фильтре (см. Сахаров С.В., Ярушкин М.М. Алгоритм автофокусировки радиолокационного изображения в РЛС с инверсным синтезированием апертуры антенны // Радиотехника. Журнал в журнале: Радиосистемы. Обработка сигналов и полей. - 2007. - №10. - С.20-25) дополнительных переходных процессов и усиления тенденции к расходимости, в связи с чем возможен срыв в работе алгоритма фокусировки и как следствие ухудшение формируемого РЛИ (снижение его фокального показателя качества).
По определению фокальный показатель качества применительно к задачам инверсного синтеза апертуры призван показать, насколько хорошо выполнена оценка параметров движения наблюдаемой цели для того, чтобы изображение цели было сфокусированным. При анализе и обработке цифровых изображений в качестве фокального показателя качества удобно использовать энтропию изображения. Этот показатель базируется на понятии, что изображение считается совершенно сфокусированным, когда его энтропия минимизирована (см. Son, J.S. Range-Doppler Radar Imaging and Motion Compensation / J.S.Son, G.Thomas, B.Flores // London: Artech House, 2001).
Пусть х - это действительная случайная величина с функцией распределения вероятности (ФРВ) р(х), тогда согласно классической формуле Шэннона энтропия х будет иметь вид
Следуя классическому определению энтропии Шэннона, энтропия цифрового изображения может быть вычислена как (см. Son, J.S. Range-Doppler Radar Imaging and Motion Compensation / J.S.Son, G.Thomas, B.Flores // London.: Artech House, 2001):

где М и N - порядковые номера пикселей по вертикали и горизонтали соответственно, zk - это частота градаций уровня серого k на изображении, а z определяется как
В выражении (5) функция Pk представляет собой функцию распределения интенсивности пикселей на изображении. Распределение интенсивности пикселей является соразмерным со степенью сфокусированности изображения. В этом контексте энтропия является мерой вероятностной неопределенности в информации, содержащейся в сформированном РЛИ. Увеличение неопределенности проявляется в том, что изображение становится более размытым, а ее уменьшение приводит к тому, что изображение становится более четким и сфокусированным. Таким образом, можно утверждать, что изображение тем лучше сфокусировано, чем меньше его энтропия, а при исследовании можно рассматривать энтропию изображения как количественную меру качества сформированного РЛИ.
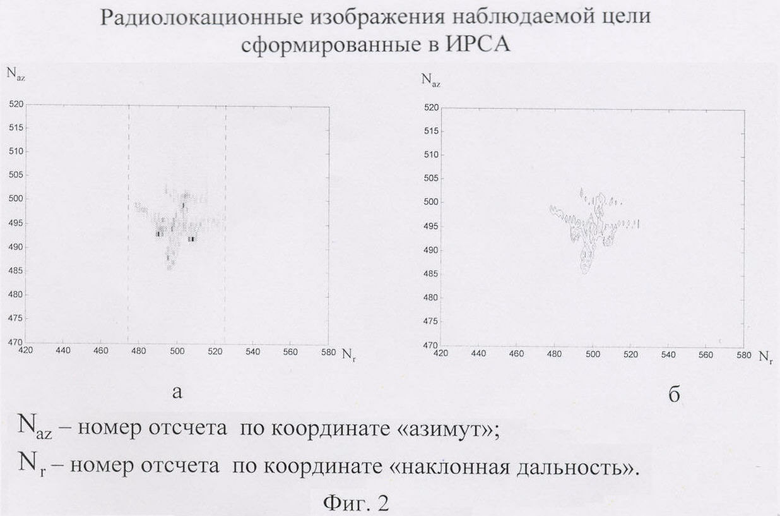
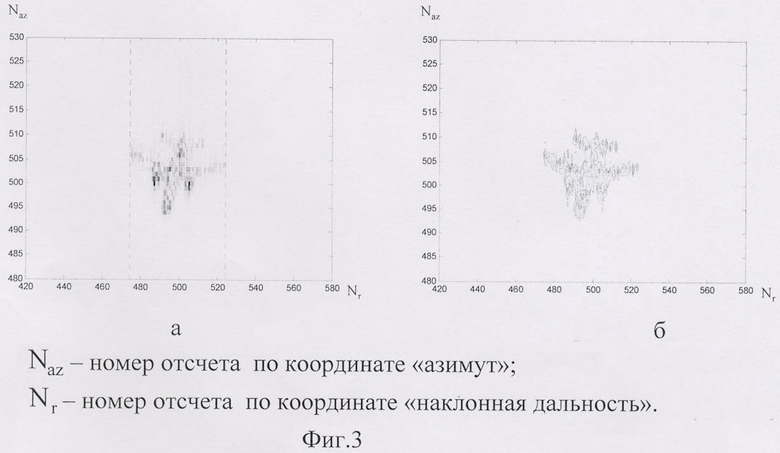
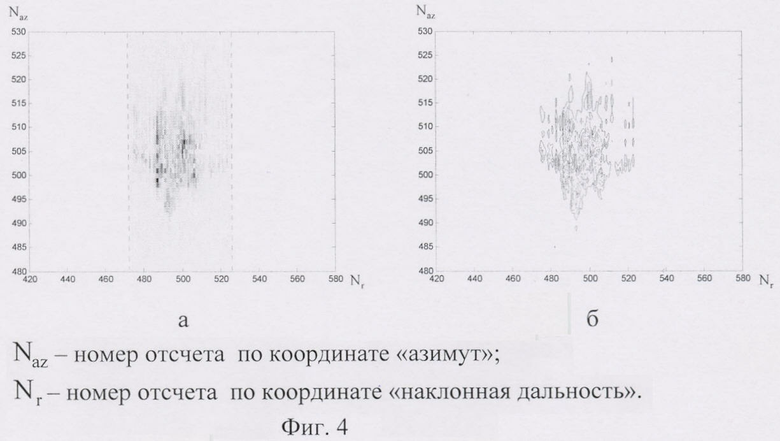
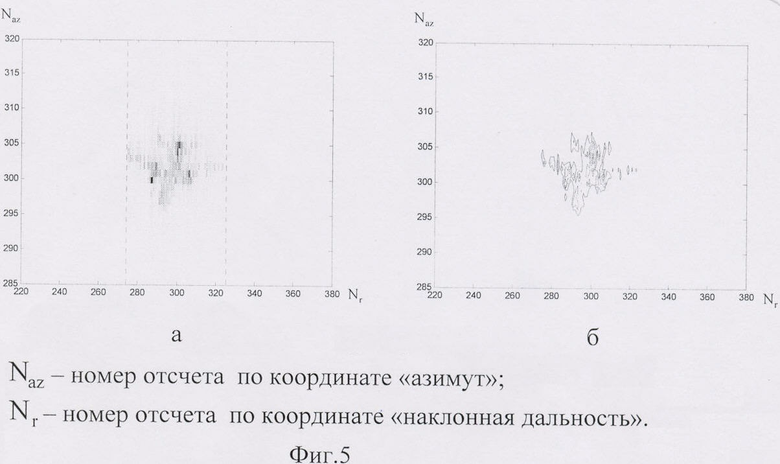
На фигурах 2-5 представлены РЛИ наблюдаемой воздушной цели в координатах азимут Naz - наклонная дальность Nr, сформированные в ИРСА, где фигуры 2а-5а представляют собой радиолокационные изображения воздушной цели, выполненное в градациях серого, а фигуры 2б-5б отображают контурные радиолокационные портреты воздушной цели по уровню половинной яркости сформированного РЛИ.
На фигуре 2 представлено РЛИ наблюдаемой воздушной цели в координатах азимут Naz - наклонная дальность Nr, сформированное в ИРСА при полностью известных параметрах движения цели и сфокусированное точно в центр масс летательного аппарата. Время синтезирования апертуры составляет 1,5 с. Пунктирной линией на фигуре изображены границы стробов дальности, используемых при обработке сигнала в ИРСА.
На фигуре 3 представлено РЛИ наблюдаемой воздушной цели в координатах азимут Naz - наклонная дальность Nr, сформированное в ИРСА при использовании оценочных значений параметров движения цели, полученных при помощи фокусирующего фильтра, устойчиво работающего на всем интервале синтезирования, равным 1 с. Изображение сфокусировано в точку летательного аппарата с максимальной интенсивностью отражения.
На фигуре 4 представлено РЛИ наблюдаемой воздушной цели в координатах азимут Naz - наклонная дальность Nr, сформированное в ИРСА при использовании оценочных значений параметров движения цели, полученных при помощи фокусирующего фильтра без учета точности их получения. В ходе работы фильтра на фиксированном интервале синтезирования, равным 1 с, на момент 0,6 с произошла «разладка», что привело к существенному отклонению оценки текущей дальности от истинного значения, то есть к концу интервала синтезирования величина нескомпенсированной фазовой ошибки составляла Δψ>π/4.
Очевидно, что изображение, представленное на фигуре 4, по сравнению с изображением фигуры 3 обладает гораздо большей энтропией (h1=1,42 и h2=0,83 соответственно) при одном и том же времени синтезирования апертуры. Таким образом, исходя из минимума энтропии, как критерия качества формирования радиолокационного изображения, можно сделать вывод о том, что разумнее было бы пожертвовать желаемым достижением высокой величины разрешающей способности по азимуту, но получить гораздо более сфокусированное изображение пусть и за меньшее время. В свою очередь, меньшее время синтезирования будет соответствовать меньшей азимутальной разрешающей способности.
На фигуре 5 представлено РЛИ наблюдаемой воздушной цели в координатах азимут Naz - наклонная дальность Nr, для случая, когда процесс формирования оценочного значения текущей дальности и формирования самого РЛИ для условий фигуры 4 был остановлен в ходе успешного обнаружения момента начала «разладки» в работе фокусирующего фильтра. Интервал синтезирования в этом случае составил всего 0.6 с, а значение энтропии сформированного РЛИ при этом составило h3=0,95.
Таким образом, интервал синтезирования для ИРСА предпочтительно выбирать не жестко фиксированной величиной, ограничиваясь только достижением требуемой разрешающей способности по азимуту. Необходимо учитывать ряд наиболее существенных дестабилизирующих работу ИРСА факторов и принимать решение о достаточности синтезирования в ходе непосредственной обработки принимаемого сигнала и формирования РЛИ, что позволит устранить эффект накопления нескомпенсированных фазовых ошибок, исключить возможность формирования расфокусированного изображения и своевременно остановить процесс инверсного синтезирования апертуры антенны. Целью такого подхода является сохранение максимальной информативности формируемого РЛИ (минимум энтропии формируемого РЛИ).
Анализ исследуемой предметной области показал, что в существующих рекуррентных алгоритмах автофокусировки РЛИ в ИРСА какие-либо способы оптимизации интервала инверсного синтезирования отсутствуют.
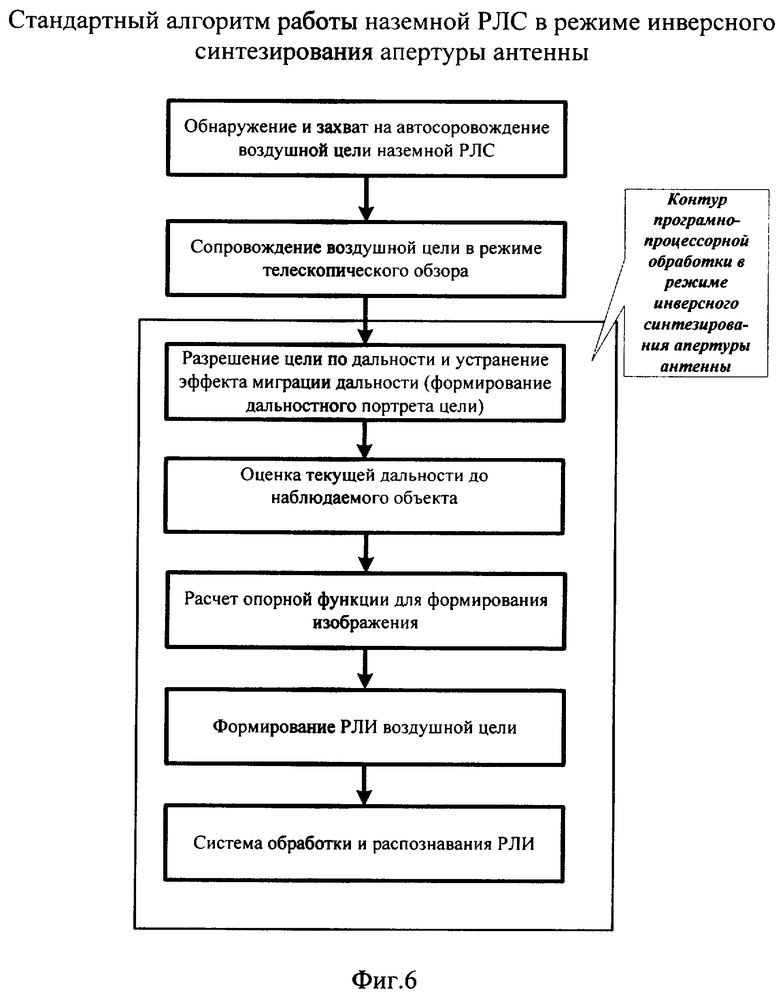
В общем виде стандартный алгоритм работы наземной РЛС в режиме инверсного синтезирования апертуры антенны представлен на фигуре 6.
Применительно к фокусирующему фильтру, который является нелинейной системой (см. Сахаров С.В. Адаптивный алгоритм автофокусировки радиолокационного изображения / С.В.Сахаров [и др.] // Вестник ТГТУ. - 2007. - Т.13. №2а. - С.392-399), для обнаружения момента появления погрешности, превышающей заданное значение, следует ограничиться анализом не всего неравенства (3), а лишь его левой части.
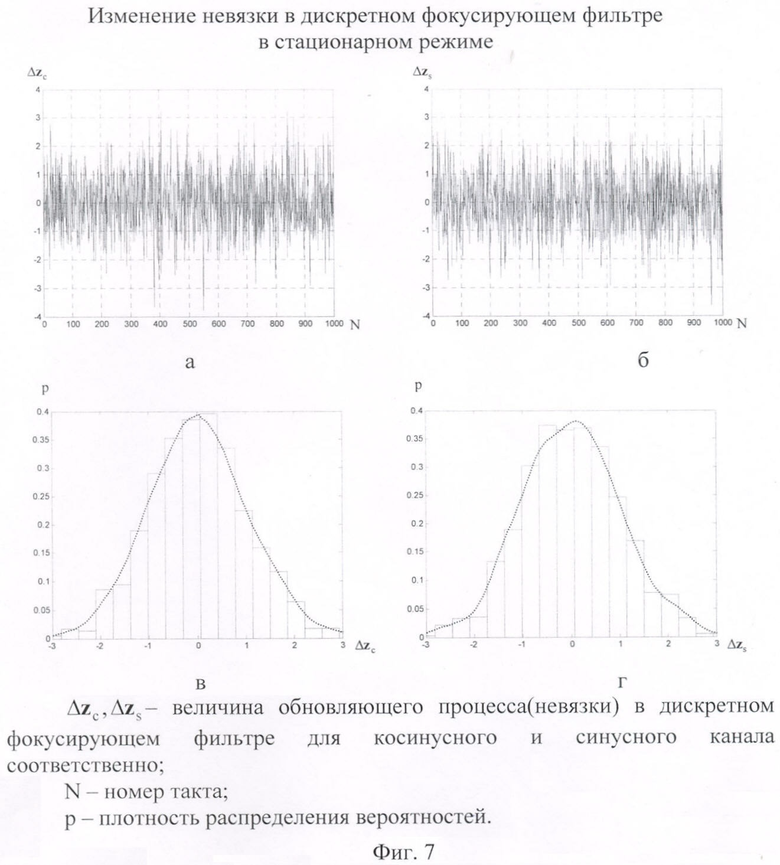
Обновляющий процесс Δz(k) для фильтра, находящегося в стационарном режиме, будет представлять собой центрированный гауссовсий процесс (см. Сейдж Э. Теория оценивания и ее применение в связи и управлении: пер. с англ. / Э.Сейдж, Дж.Мелс. - М.: Радио и связь, 1976) с дисперсией

и математическим ожиданием, близким к нулю. В выражении (7)  - матрица частных производных от вектора наблюдения по вектору экстраполированных параметров
- матрица частных производных от вектора наблюдения по вектору экстраполированных параметров 
 - ковариационная матрица экстраполированных значений дисперсий; Dи - ковариационная матрица дисперсий шумов наблюдения;
- ковариационная матрица экстраполированных значений дисперсий; Dи - ковариационная матрица дисперсий шумов наблюдения;  - тензор, учитывающий члены разложения выше первого порядка при линеаризации уравнения наблюдения;
- тензор, учитывающий члены разложения выше первого порядка при линеаризации уравнения наблюдения;
На фигуре 7 представлены зависимости невязок Δzc и Δzs от дискретного времени N в отдельности для синусного и косинусного каналов системы обработки при стационарном режиме работы (фигура 7 а, б) и их плотности распределения вероятностей р (гистограммы) (фигура 7 в, г).
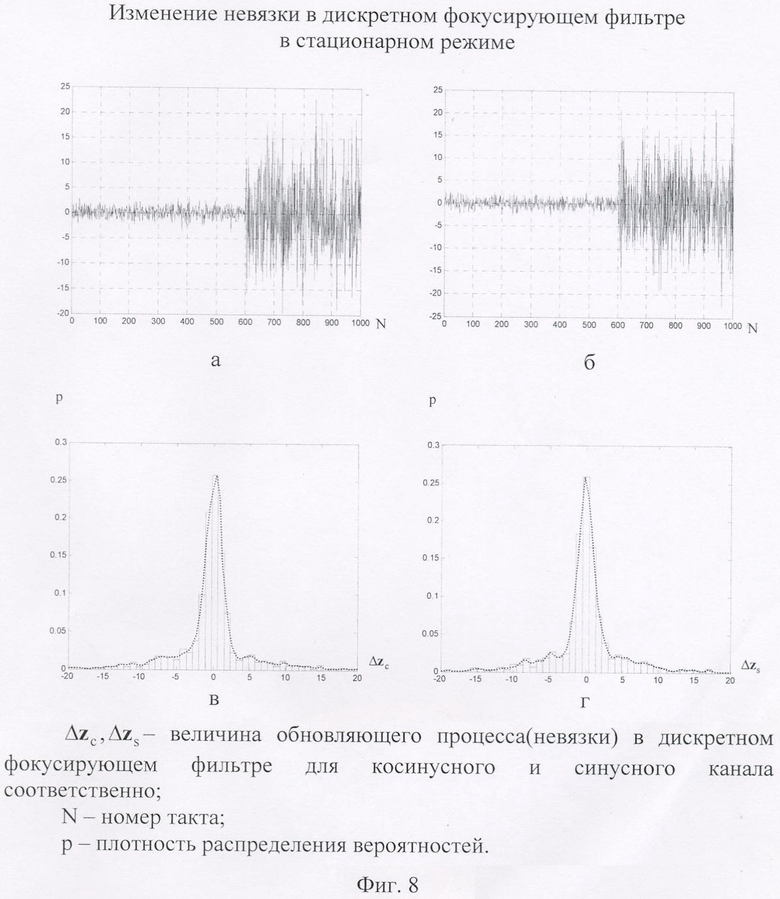
На фигуре 8 представлены зависимости невязок Δzc и Δzs от дискретного времени N в отдельности для синусного и косинусного каналов системы обработки (фигура 8 а, б) и их плотности распределения вероятностей р (гистограммы) (фигура 8 в, г) при ухудшении условий работы фильтра в случайный момент времени.
В случае ухудшения условий работы фильтра или возникновения срыва в его работе случайный процесс, представляющий собой невязку (обновляющий процесс) в каждом из каналов в существенной мере изменит одну из своих статистических характеристик, а именно свою дисперсию или среднеквадратичное отклонение. При этом характер распределения этих процессов остается прежним - гауссовским. Проведенное исследование по многочисленным реализациям работы фильтра позволило сделать вывод о том, что любой из двух обновляющих процессов, имеющихся в системе обработки, несет в себе не только информацию об изменениях, касающихся точностных характеристик следящей системы, но и информацию о моменте возникновения этих изменений.
Таким образом, априорно определив эмпирическим путем статистические характеристики одного из процессов Δzc или Δzs, при которых фильтр еще формирует оценку текущей дальности с точностью не хуже заданной, представляется возможным наложить ограничение на максимально допустимое значение выбранного обновляющего процесса и отслеживать выполнение этого условия непосредственно в ходе работы фильтра. Нарушение данного условия будет свидетельствовать о возникновении в фильтре переходных процессов, соответствующих ухудшению точности формируемой оценки ниже допустимого уровня.
Исходя из классического «правила трех сигм» для нормально распределенной случайной величины (см. Шахтарин Б.И. Случайные процессы в радиотехнике. 2-е изд. испр. и дополн. М.: Радио и связь, 2002), в качестве статистической характеристики обновляющего процесса, подлежащей априорной эмпирической оценке, удобно выбрать среднеквадратичное отклонение невязки одного из каналов наблюдения Δs -  . Само условие формирования оценочного значения текущей дальности с заданной точностью будет соответствовать неравенству (4), согласно которого значение обновляющего процесса Δz не должно превышать величины трех допустимых, априорно рассчитанных СКО того же самого обновляющего процесса.
. Само условие формирования оценочного значения текущей дальности с заданной точностью будет соответствовать неравенству (4), согласно которого значение обновляющего процесса Δz не должно превышать величины трех допустимых, априорно рассчитанных СКО того же самого обновляющего процесса.
Непосредственно в процессе рекуррентной обработки принимаемого сигнала необходимо выполнять проверку истинности условия (4) и отслеживать факт нарушения его истинности.
Для достоверности принятия решения о начале «разладки» в следящей системе (нарушение истинности условия (4)) целесообразно принимать решение об остановке процесса фильтрации не по первому успешному выполнению условия, а по логике работы, «два из трех» или «три из трех».
После подтверждения факта наличия «разладки» в следящей системе по оценке изменения текущей дальности принимают решение о достаточности времени инверсного синтеза аппретуры и останавливают процесс инверсного синтезирования в целом.
Соответствующее условию (4) правило принятия решения о необходимости остановки процесса формирования оценки текущей дальности и всей процедуры инверсного синтеза в целом следует записать в следующем виде:

где  - время, характеризующее момент остановки процесса инверсного синтеза апертуры; t - текущее время в процессе обработки.
- время, характеризующее момент остановки процесса инверсного синтеза апертуры; t - текущее время в процессе обработки.
Структурная схема алгоритма, отражающая необходимые для выполнения операции согласно предлагаемому способу, представлена на фигуре 9.
Обобщенная структурная схема работы инверсной РСА с включением в контур программно-процессорной обработки алгоритма оптимизации интервала синтезирования на основе предлагаемого способа представлена на фигуре 10. Представленная схема отличается от существующей (фиг.6) наличием алгоритма выбора оптимальной продолжительности интервала инверсного синтезирования.
Таким образом, согласно разработанному методу при работе дискретного фокусирующего фильтра в ИРСА, формирующего оценку изменения текущей дальности до наблюдаемой цели, осуществляется контроль точности формируемой оценки и обнаруживается момент появления погрешности, превышающей заданное значение, тем самым позволяя улучшить качество формируемого РЛИ за счет: устранения эффекта накопления нескомпенсированных фазовых ошибок; исключения возможности формирования расфокусированного изображения; своевременной остановики процесса инверсного синтезирования апертуры антенны.



Изобретение относится к области радиотехники и может быть использовано в бортовых и наземных радиолокационных станциях с инверсным синтезированием апертуры антенны (ИРСА). Достигаемым техническим результатом изобретения является повышение качества формируемого в ИРСА радиолокационного изображения (РЛИ) на основе обнаружения момента появления погрешности, превышающей заданное значение в фокусирующем фильтре. Сущность изобретения заключается в том, что при работе дискретного фокусирующего фильтра, формирующего оценку изменения текущей дальности до наблюдаемой цели, осуществляется контроль точности формируемой оценки и обнаруживается момент появления погрешности, превышающей заданное значение, тем самым позволяя устранить эффект накопления нескомпенсированных фазовых ошибок, исключить возможность формирования расфокусированного изображения, своевременно остановить процесс инверсного синтезирования апертуры антенны. 10 ил.
Способ выбора оптимальной продолжительности интервала синтезирования в радиолокационной станции с инверсным синтезированием апертуры антенны, при котором осуществляют контроль точности оценки изменения текущей дальности до наблюдаемой цели, формируемой в дискретном фокусирующем фильтре и обнаруживают момент появления погрешности, превышающей заданное значение, отличающийся тем, что время инверсного синтезирования апертуры выбирают непосредственно в процессе обработки принимаемого сигнала путем того, что априорно определяют максимально допустимое значение среднеквадратического отклонения величины обновляющего процесса (невязки) в одном из каналов обработки, в процессе рекуррентной обработки принимаемого сигнала выполняют проверку истинности условия, при котором значение обновляющего процесса не должно превышать величины трех допустимых, априорно рассчитанных среднеквадратических отклонений того же самого обновляющего процесса, при нарушении истинности этого условия подтверждают факт нарушения согласно выбранной логике работы («два из трех» или «три из трех»), принимают решение о достаточности времени инверсного синтеза аппретуры и останавливают процесс инверсного синтезирования.
| САХАРОВ С.В | |||
| и др | |||
| Адаптивный алгоритм автофокусировки радиолокационного изображения | |||
| Вестник ТГТУ, 2007, т.13, №2а, с.392-399 RU 2129286 С1, 20.04.1999 | |||
| RU 2055396 C1, 27.02.1996 | |||
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ЦЕЛИ | 2004 |
|
RU2292061C2 |
| Система идентификации параметров объекта | 1980 |
|
SU949635A1 |
| US 4855747 A, 08.08.1989 | |||
| СПОСОБ ДЕКОДИРОВАНИЯ ВИДЕОСИГНАЛА | 2012 |
|
RU2628160C1 |
| СМЕСИ О-АЦИЛ-ИЗЕТИОНАТОВ И ПАВ НА ОСНОВЕ N-АЦИЛ-АМИНОКИСЛОТ | 2013 |
|
RU2606113C2 |
| US 2005062639 A1, 24.03.2005. | |||

