Изобретение относится к автоматическому управлению, в частности адаптивных систем управления подвижными объектами.
Известна система идентификации параметров объекта, в которой подстраивается под объект его динамическая модель с целью минимизации сигнала, характеризующего степень несовпадения их выходных переменных 1 .
Наиболее близкой к предлагаемой по технической сущности является система идентификации параметров объекта, содержащая первый блок реализации алгоритмов идентификации, модель, последовательно соединенные объект идентификации и блок сравнения, вход модели подключен к входу объекта идентификации, а выход - к второму входу блока сравнения .
Ограниченные функциональные возможности этой системы обусловлены тем, что она не может удовлетворительно справляться с вырожденными задачгили параметрической идентификации, которые достаточно часто встречаются при построении адаптивных систем управления подвижными объектами.
Особенности таких задач состоят в том, что из-за недостатка информа-цйи об идентифицируемом объекте существует целое множество моделей объекта одинаково хорошо позволякнцих минимизировать сигнал невязки реакций модели и объекта.
Рассмотрим в качестве примера линейную динамическую систему, замкну10тую линейным законом управления:
(1)
X АХ + ви (2)
-LX
и
15
где X е R
вектор состояния объекта; UeR™ вектор управления; А и В вещественные матрицы соответствующих размерностей,
20 характеризующих объект; L - вещественная матрица
коэффициентов линейного закона управления. Ясно, 4Tcf во всем фазовом прост25ранстве R любое решение можно получить как решение однородной системы
(3)
X DX;
30 (4)
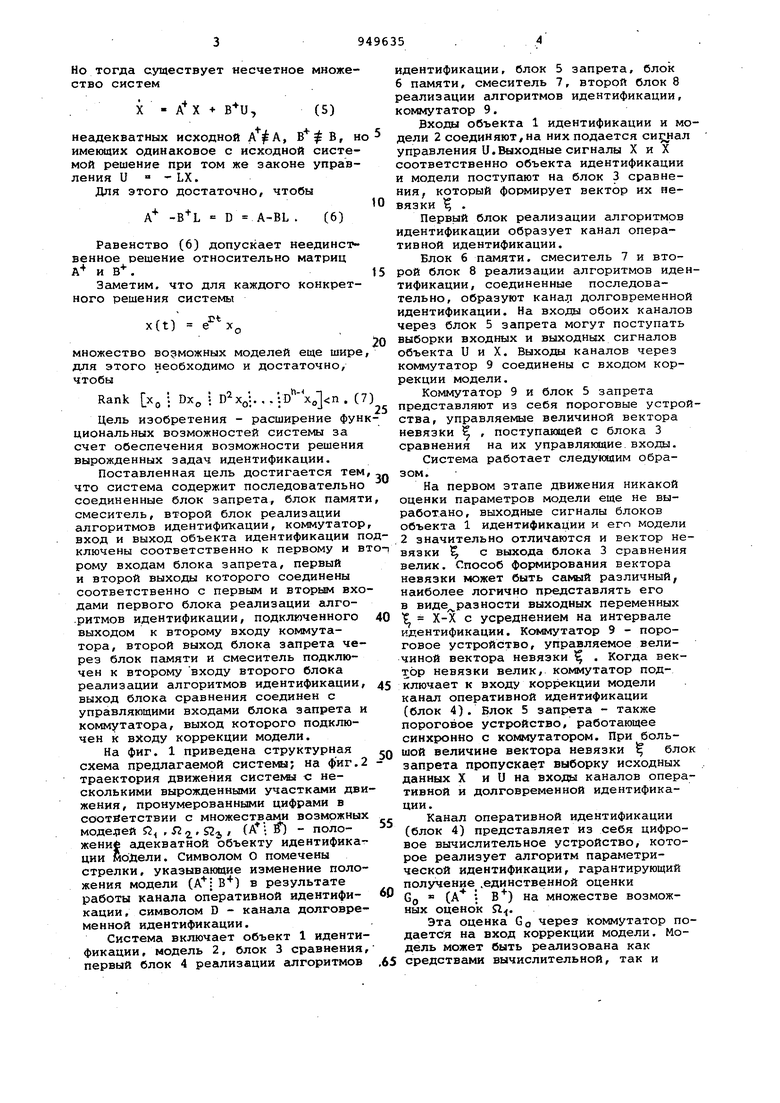
D A-BL Но тогда существует несчетное множество систем + , неадекватных исходной , B В, н имеющих одинаковое с исходной системой решение при том же законе управления и «« - LX. Для этого достаточно, чтобы А D A-BL . (6) Равенство (6) допускает неединственное решение относительно матриц А и В. Заметим, что для каждого конкретного решения системьт множество возможных моделей еще шире для этого необходимо и достаточно, чтобы Rank хд ; Dx 1 . , . . ( Цель изобретения - расширение фун циональных возможностей системы за счет обеспечения возможности решения вырожденных задач идентификации. Поставленная цель достигается тем что система содержит последовательно соединенные блок запрета, блок памят смеситель, второй блок реализации алгоритмов идентификации, коммутатор вход и выход объекта идентификации п ключены соответственно к первому и в рому входам блока запрета, первый и второй выходы которого соединены соответственно с первым и втсфым вхо дами первого блока реализации алго.ритмов идентификации, подключенного выходом к второму входу коммутатора, второй выход блока запрета че рез блок памяти и смеситель подключен к второму входу второго блока реализации алгоритмов идентификации выход блока сравнения соединен с управляющими входами блока запрета коммутатора, выход которого подключен к входу коррекции модели. На фиг. 1 приведена структурная схема предлагаемой системы; на фиг. траектория движения систелвл с несколькими вырожденными участкс1ми дв жения, пронумерованньпии цифрами в соответствии с множеств с1ми возможны моде;51ей S2 ,2.S22,, ( f) - положени сшекватной объекту идентифика ции модели. Символом О помечены стрелки, указывающие изменение поло жения модели ( ) в результате работы канала оперативной идентификации, символом D - канала долговре менной идентификации. Система включает объект 1 иденти фикации, модель 2, блок 3 сравнения первый блок 4 реализации гшгоритмов идентификации, блок 5 запрета, блок б памяти, смеситель 7, второй блок 8 реализации алгоритмов идентификации, коммутатор 9. Входы объекта 1 идентификации и модели 2 соединяют, на них подается сигнал управления и.Выходные сигналы X и X соответственно объекта идентификации и модели поступают на блок 3 сравнения, который формирует вектор их невязки . Первый блок реализации алгоритмов идентификации образует канал оперативной идентификации. Блок 6 памяти, смеситель 7 и второй блок 8 реализации алгоритмов идентификации, соединенные последовательно, образуют кана долговременной идентификации. На входы обоих каналов через блок 5 запрета могут поступать выборки входных и выходных сигналов объекта U и X. Выходы каналов через коколутатор 9 соединены с входом коррекции модели. Коммутатор 9 и блок 5 запрета представляют из себя пороговые устройства, управляемые величиной вектора невязки , поступаиадей с блока 3 сравнения на их управлякяаие. входы. Система работает следующим образом. На первом этапе движения никакой оценки параметров модели еще не выработано, выходные сигналы блоков объекта 1 идентификации и егп модели 2 значительно отличаются и вектор невязки с выхода блока 3 сравнения велик. Способ формирования вектора невязки может быть самый различный, наиболее логично представлять его в виде разности выходных переменных Х-Х с усреднением на интервале идентификации. Кс «мутатор 9 - пороговое устройство, управляемое величиной вектора невязки . Когда вектор невязки велик, коммутатор подключает к входу коррекции модели канал оперативной идентификации (блок 4). Блок 5 запрета - также пороговое устройство, работающее синхронно с коммутатором. При большой величине вектора невязки блок запрета пропускает выборку исходных данных X и и на входы каналов оперативной и долговременной идентификации. Канал оперативной идентификации (блок 4) представляет из себя цифровое вычислительное устройство, которое реализует алгоритм параметрической идентификации, гарантирующий получение .единственной оценки GO {А В) на множестве возможных оценок 51. Эта оценка GO через коммутатор подается на вход коррекции модели. Модель может быть реализована как средствами вычислительной, так и аналоговой техники, через вход коррекции происходит настройка ее параметров. После этого вектор невязки на первом участке минимизируется, коммутатор .переключает вход коррекции модели на канал долговременной идентификации, а блок.запрета не про пускает на входы каналов оперативной и долговременной идентификации выборки исходных данных, уже не несущие информации. Поскольку в блоке памяти ранее ничего не хранилось, то в результате работы канала долговременной идентификации оценка Gg ничем на этом этапе не отличается от оценки . Так продолжается до тех пор,пока система не выйдет на второй участок движения. Поскольку старая модель не в состоянии верно отобразить характер этого движения, то вектор невязки рез ко возрастает. Блок запрета пропускает новую выборку исходных данных на входы каналов оперативной и долговременной идентификации. Коммутатор снова переключается на канал оперативной идентификации, где быстро вь1рабатывается новая оценка 0 (А )2. После этого вектор невязки уменьша ется и коммутатор снова пе1эеключается на канал долговременной идентификации Канал долговременной идентификации ра ботает параллельно оперативному, но к нему уже не предъявляется столь жест ких требований относительно времени работы, поэтому во втором блоке реали заций алгоритмов идентификации может применяться более точный и сложный ал горитм параметрической идентификации. Блок 6 памяти организуется по ПРИН ЦИПУ стековой памяти и может быть выполнен с помошью любого оперативного запоминающего устройства. Это означаетf что по мере поступления в него. выборок старые выборки сдвигаютя в памяти, освобождая место новым, и по истечении конечного числа тактов,опре деляемо го размерами памяти , старые выборки.вообще вытесняются из памяти, Такая структура позволяет адаптироваться к нестационарности параметров объекта идентификации за счет обновления памяти., С поступлением каждой новой выборки X и и в память включает ся смеситель 7. Функции этого блока несложны, он имеет доступ к каждой ячейке памяти, составляет обобщенную выборку из поступивших и хранящихся ранее в памяти выборок исходных-данных и активизирует второй блок реализации алгоритмов идентификации. Эти функции можно реализовать с помощью устройства на логических элементах или с помощью цифрового вычислительного уст ройства. В нашем случае в памяти хранится уже две выборки,принадлежащие первому и второму участку идентификации, поэтому второй блок реализации алгоритмов идентификации по обоЛденной выборке получает оценку G( 3), принадлежащую пересечению множеств Si и 52-J. Через коммутатор эта оценка поступает на вход коррекции модели 2. Таким образом работает система и при большем числе разнотипных участков, движений. Повторяющиеся участки движения с одинаковым мнокеством возможных моделей не вызывают у«е рост вектора невязки, так как оценка принадлежит пересечению всех пройденных множеств. Это позволяет адаптироваться к избыточной информации и существенно экономить память. По получении наиболее общей оценки процессы идентификации в -системе могут быть остановлены, так как блок запрета блокирует доступ в память ненужной информации, канал долговременной идентификации уже переработал всю хранящуюся в памяти информацию, а канал оперативной идентификации выключен коммутатором. Это позволяет значительно экономить вычислительные мощности (они могут быть освобождены для выполнения операций другого характера). Реализовать все указанные блоки в системе можно с использованием устройств самого разнообразного характера, в том числе и на базе цифровых вычислительных машин или микропроцессоров совместно с аналоговой техникой. 1 Таким образом, предлагаемая система имеет более широкую область при- менения за счет того, что может использоваться в случае вырожденных задач идентификации, которые часто встречаются при построении адаптивных систем управления подвижньлми объектами. Формула изобретения Система идентификации параметров объекта, содержащая первый блок реализации алгоритмов идентификации, модель, последовательно соединенные объект идентификации и блок сравнения, вход модели подключен к входу объекта идентификации, а выход - к второму йходу блока сравнения, отличающаяся тем, что, с целью расширения функциональных возможностей, она содержит последовательно соединенные блок запрета,блок памяти, смеситель, второй блок реализации алгоритмов идентификации,коммутатор, вход и выход объекта идентификации подключены соответственно к первому и второму входс1м блока запрета, первый и второй выходы которого соединены соответственно с первым и вторым входами первого блока
реализации алгоритмов идентификации, подключенного выходом к второму входу коммутатора, второй .выход блока Запрета через блок памяти и смеситель подключен к второму входу вто рого блока реализации алгоритмов идентификации, выход блока сравнения соединен с управляющими входами блока запрета и коммутатора, выход которого подключен к входу коррекции мидели.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 693342, кл. G 05 В 23/02, 1979.
2.Авторское свидетельство СССР № 703779, кл. G 05 В 13/02, 1980 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Система идентификации параметров объекта | 1983 |
|
SU1156001A1 |
| Система идентификации параметров объекта | 1986 |
|
SU1413597A1 |
| УСТРОЙСТВО ДЛЯ НАСТРОЙКИ КОРРЕКТОРА МЕЖСИМВОЛЬНОЙ ИНТЕРФЕРЕНЦИИ | 1991 |
|
RU2034404C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2263281C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И ЭТАЛОННОЙ МОДЕЛЬЮ | 2001 |
|
RU2191419C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 1994 |
|
RU2108612C1 |
| ДИСКРЕТНАЯ СИСТЕМА ОЦЕНИВАНИЯ | 2007 |
|
RU2398258C2 |
| СПОСОБ И СИСТЕМА УДАЛЁННОЙ ИДЕНТИФИКАЦИИ И ПРОГНОЗИРОВАНИЯ РАЗВИТИЯ ЗАРОЖДАЮЩИХСЯ ДЕФЕКТОВ ОБЪЕКТОВ | 2018 |
|
RU2686257C1 |
| КОМПЛЕКСНЫЙ ОБНАРУЖИТЕЛЬ КРИВОЛИНЕЙНЫХ ТРАЕКТОРИЙ ВОЗДУШНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ПАРАМЕТРИЧЕСКИХ ПРЕОБРАЗОВАНИЙ | 2021 |
|
RU2776417C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260177C1 |
и
ZTT
3
)(д
Од
ZZJ
/
iJ
±
