Изобретение относится к измерительной технике, в частности к области приборостроения, и может найти применение в инерциальных системах подвижных объектов, в автопилотах авиа- и судомоделей и в системах безопасности транспортных средств.
Известен микромеханический вибрационный гироскоп-акселерометр, конструктивно выполненный в виде внешнего и внутреннего плоских элементов, которые соединены между собой и с основанием посредством взаимно перпендикулярных торсионов. В центре внутреннего элемента размещена инерционная масса со смещенным центром масс относительно геометрического центра внутреннего элемента (см. патент РФ N 2064682, МКИ G 01 P 15/08, 1993).
Одним из недостатков данного устройства является значительный разброс в пространстве колеблющихся плоскостей, что приводит при работе в обычной газовой среде к появлению больших сил демпфирования. Для нормального функционирования прибора требуется его вакуумировать, что усложняет технологию и удорожает прибор.
Другой недостаток связан с необходимостью установки инерционной массы на внутренний элемент, что в условиях микросборки при достаточно высоком требовании к точности дополнительно усложняет технологию.
Первый недостаток в некоторой степени уменьшен в известных акселерометрах с симметричным закреплением инерционной массы и отверстиями в плоскостных элементах акселерометров (см. патент США N 5353641, НКИ 73-517, публ. 1994, патент США N 5431050, НКИ 73-517, публ. 1995).
Наиболее близким аналогом является известный микромеханический прибор, в котором в значительной степени устранены отмеченные недостатки (см. Микромеханические гироскопы. Современное состояние теории и практических результатов разработки микромеханических гироскопов. А.М. Лестев, И.В. Попова. АОЗТ ГИРООПТИКА, Санкт-Петербург, Россия, 1996).
В этом устройстве применена планарная конструкция без дополнительной инерционной массы. Прибор содержит плату из диэлектрического материала с напыленными электродами, пары датчиков угла и момента, а также две инерционные массы, выполненные в виде пластин из электропроводного материала со сквозными квадратными отверстиями, причем пластины расположены с зазором относительно платы и связаны с ней через соответствующие пары упругих балочек, закрепленных с одной стороны на жестких опорах, расположенных на плате, а с другой стороны - на пластинах инерционных масс, при этом пластины на боковых сторонах имеют прямозубую форму, а в зазорах их зубьев расположены зубья электродов системы возбуждения, причем электроды соединены с генератором гармонических сигналов. При вращении основания с платой относительно оси чувствительности прибора возникают противоположно направленные кориолисовы силы инерции инерционных масс, вызывающие соответствующие им колебания этих масс. Амплитуды этих колебаний пропорциональны измеряемой угловой скорости.
Данный микромеханический прибор принят здесь за прототип.
Недостатком указанного устройства является то, что прибор измеряет только угловую скорость. При этом имеется достаточная конструктивная сложность устройства прибора, что обуславливает необходимость усложнения технологии изготовления. Так, например, наличие двух пластин инерционных масс вызывает необходимость введения операций сборки с выполнением значительного количества сварочных операций.
Техническим результатом настоящего изобретения является дальнейшая существенная миниатюризация конструктивной схемы прибора за счет применения только одной пластины - инерционной массы, что существенно упрощает технологию его изготовления за счет исключения операций сборки и сварки при расширении функциональных возможностей за счет обеспечения возможности одновременного измерения угловой скорости и линейного ускорения.
Технический результат достигается тем, что в известном устройстве-аналоге, содержащем плату из диэлектрического материала с напыленными на ней электродами датчика угла и датчика момента и инерционную массу, расположенную с зазором относительно платы и связанную с ней через две упругие балочки, которые одними концами жестко прикреплены к опорам, расположенным на плате, а вторыми - к инерционной массе, выполненной в виде пластины из электропроводного материала со сквозными отверстиями и боковыми гребенчатыми зубцами электродов пластины, при этом на плате закреплены электроды системы возбуждения с гребенчатыми зубцами, установленные с возможностью электростатического взаимодействия с инерционной массой в плоскости ее пластины через боковые зазоры и взаимопроникающие друг в друга гребенки электродов, причем электроды соединены с электронной схемой обработки сигналов, в пластине выполнены, по меньшей мере, две сквозные параллельные прорези от периферии пластины до линии, проходящей через ее геометрический центр перпендикулярно прорезям, в местах их пересечения с которой к пластине прикреплены вторые концы упругих балочек, установленных в указанных прорезях с возможностью совершения колебаний в плоскости пластины и ортогонально к ней.
Кроме того, сквозные отверстия могут быть выполнены в форме квадрата со стороной, параллельной прорезям.
Кроме того, сквозные отверстия могут быть выполнены со стороной, размер которой не меньше удвоенной величины начального зазора между электродами пластины и электродами платы из диэлектрического материала.
Кроме того, упругие балочки могут быть выполнены с квадратным поперечным сечением.
Кроме того, электронная схема обработки сигнала может быть выполнена в виде последовательно включенных генератора питания для датчика угла и регулятора напряжения датчика угла и датчика момента, последовательно включенных предварительного усилителя, первого фазочувствительного выпрямителя, корректирующего контура, разделительного фильтра, второго фазочувствительного выпрямителя и фильтра канала гироскопа, генератора системы электростатического возбуждения, подключенного через два регулятора напряжения к электродам системы возбуждения, а также фильтра канала акселерометра, подключенного к регулятору напряжения датчика угла и датчика момента и выходу корректирующего контура, при этом второй выход генератора питания для датчика угла подключен ко второму входу первого фазочувствительного выпрямителя, электрод датчика угла и датчика момента подключен к регулятору напряжения датчика угла и датчика момента, а электроды инерционной массы подключены ко входу предварительного усилителя.
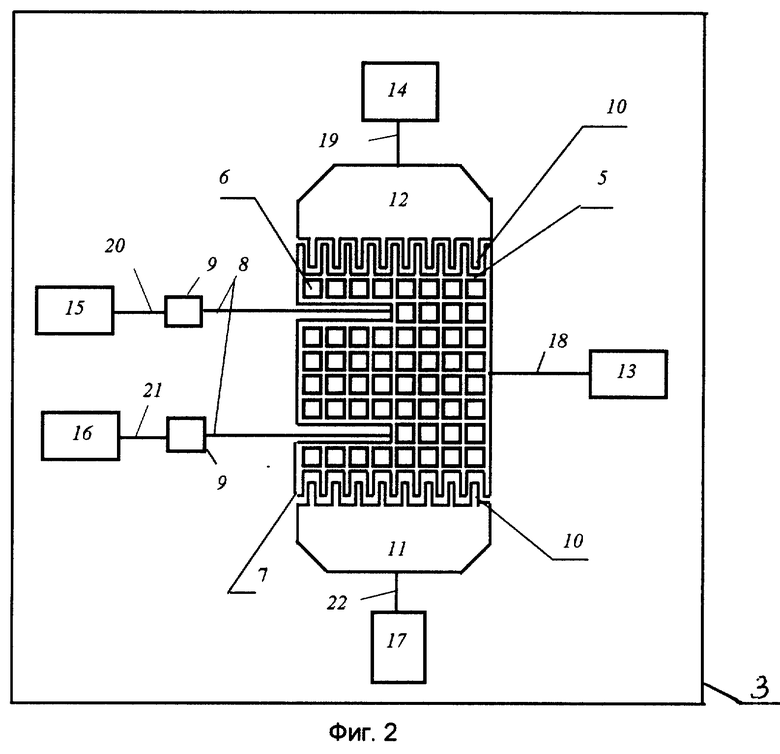
На фиг. 1 приведена конструктивная схема устройства в сечении, ортогональном плоскости пластины инерционной массы.
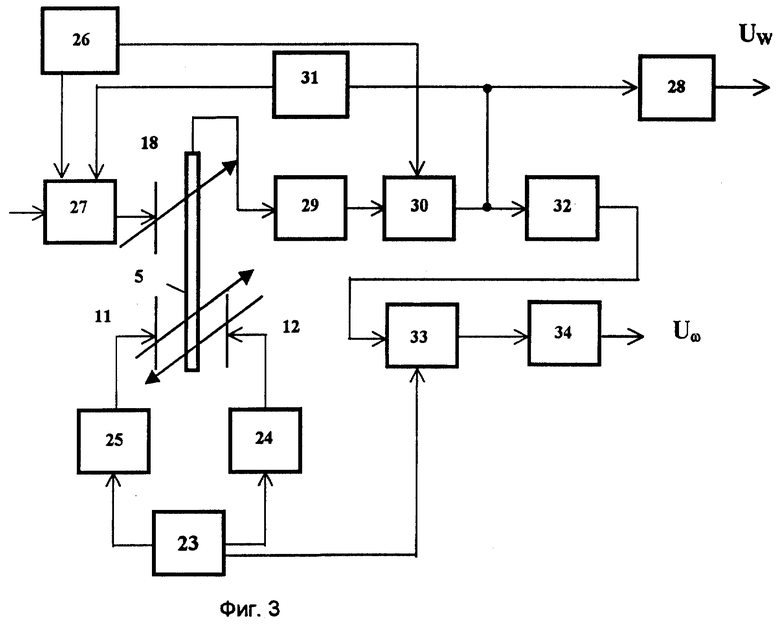
На фиг. 2 приведена конструктивная схема пластины инерционной массы и размещения электродов.
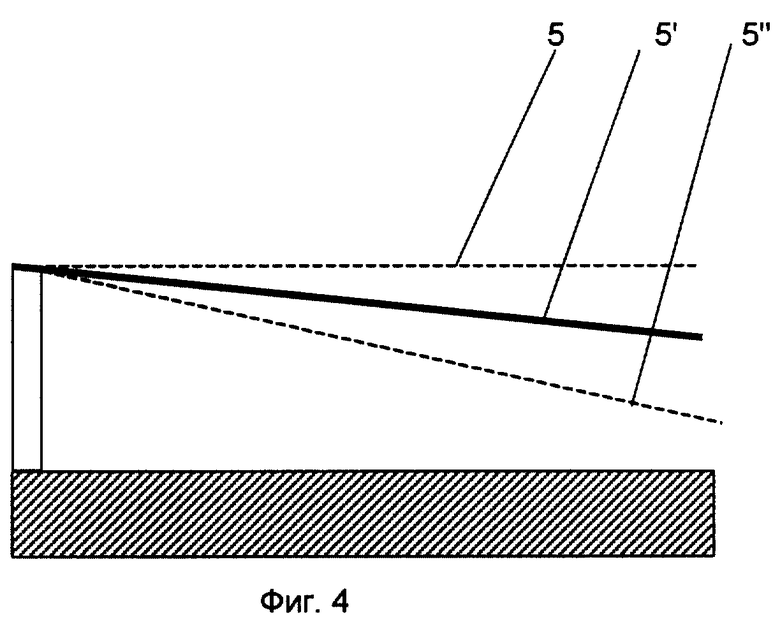
На фиг. 3 показана блок-схема обработки сигнала микромеханического вибрационного гироскопа-акселерометра.
На фиг. 4 приведена схема подвеса инерционной массы, поясняющая действие вводимой уставки.
Микромеханический вибрационный гироскоп-акселерометр содержит плату 1 из кристалла, например, ситалла, сапфира или кремния, на которой размещены элементы электроники и сборки узла чувствительного элемента 2 микромеханического вибрационного гироскопа-акселерометра 3. На плате 1 сформирован электрод 4 датчика угла и датчика момента. Инерционный узел состоит из пластины 5 в форме квадрата, в которой равномерно распределены на поверхности сквозные отверстия 6, выполненные в форме многоугольника с количеством граней не менее четырех и элементов подвеса. Размер стороны каждого отверстия (квадрата или наибольшей из диагоналей многоугольника) в плане таков, что он не менее чем в два раза превышает величину начального зазора между пластиной 5 и электродами платы 1. Максимальное значение величины этой стороны определяется конструктивными соображениями и измерительными характеристиками преобразования измеряемых параметров.
Боковые стороны пластины 5 выполнены в виде гребенчатых зубцов 7. Элементы подвеса инерционной массы выполнены посредством двух параллельных упругих балочек 8, жестко закрепленных с одной стороны на опорах 9, основания которых жестко закреплены на нижней плате 1 электродов. С другой стороны балочки 8 соединены с пластиной. Соединение выполнено на линии геометрического центра пластины инерционной массы, а сами балочки располагаются в параллельных прорезях пластины. Выполнение балочек с поперечным сечением в форме квадрата является оптимальным с точки зрения технологичности изготовления и настройки измерительных характеристик устройства.
Неподвижные электроды 10 электростатической системы возбуждения расположены на опорах 11 и 12, которые закреплены на нижней плате 1 электродов.
Плата 1 электродов представляет собой пластину из диэлектрика, на которой размещены пять контактных площадок 13-17, соединенных с помощью пяти токопроводящих дорожек 18-22 с электродом датчика угла и датчика момента, электродами электростатической системы возбуждения и электродами инерционной массы 5. Размеры кристалла одного из вариантов исполнения платы находятся в пределах 1,8·1,8·1,15 мм, пластины инерционной массы 0,308·0,308 мм при зазоре между пластиной и платой от 2 до 5 мкм.
Питание прибора осуществляется от генератора системы электростатического возбуждения 23, который через регуляторы напряжения 24, 25 запитывает электроды системы возбуждения и один из двух фазочувствительных выпрямителей 33. Электронная схема обработки сигнала включает в себя также генератор питания для датчика угла 26, регулятор напряжения 27 датчика угла и датчика момента, сигнал с которого подается на электрод датчика угла и датчика момента, фильтр канала акселерометра 28, предварительный усилитель 29, первый фазочувствительный выпрямитель 30, корректирующий контур 31, разделительный фильтр 32, второй фазочувствителный выпрямитель 33 и фильтр канала гироскопа 34.
Микромеханический вибрационный гироскоп-акселерометр работает следующим образом.
При включенном питании под воздействием электростатических сил в зазорах гребенчатых зубцов на частоте источника питания пластина 5 совершает боковые возвратно-поступательные движения. В том случае, когда относительно направления, параллельного направлениям балочек 8 упругого подвеса, действует угловая скорость, вектор которой параллелен балочкам 8, то на той же частоте в направлении, ортогональном плоскости пластины 5, возникают кориолисовы силы, которые в направлении действия этих сил приводят в колебательное движение эту пластину. Зазор между электродами и емкость датчика угла изменяются. Возникает сигнал напряжения, величина (амплитуда) которого пропорциональна величине измеряемой угловой скорости.
При действии линейного ускорения в направлении, ортогональном плоскости пластины 5, межэлектродная емкость и величина сигнала будут изменяться по закону действующего ускорения, то есть по закону изменения постоянного тока. По частотному признаку сигналы каналов гироскопа и акселерометра разделяются и после фильтрации поступают на выход прибора (стрелки Uω и Uw на фиг. 3).
Поскольку технический результат, заключающийся в миниатюризации прибора за счет упрощения конструкции, достигнут, в частности, за счет применения одностороннего (недифференциального) датчика угла, то одновременно дополнительно расширяются функциональные возможности за счет измерения сигналов (параметров) движения объекта в "прямом" и "обратном" направлениях. Для решения этой задачи применено постоянное напряжение (2-2,5 В) - уставка - между электродами датчика угла (или момента). В результате уставки подвижный 5 (фиг. 1) электрод (пластина инерционной массы) вместо нейтрального (в отсутствие питания) положения 5 займет положение 5', а положения 5 и 5'' будут граничными, определяющими диапазон допустимых изменений сигнала и, таким образом, диапазон изменений обоих параметров движения - угловой скорости и линейного ускорения. При этом положительный импульс или сигнал будет увеличивать суммарное с уставкой напряжение и пластина будет приближаться к положению 5'', а отрицательный сигнал будет вычитаться из уставки и общее напряжение на электродах будет уменьшаться, в результате пластина будет стремиться к положению 5.
Режим колебаний предпочтительно должен быть настроен на резонансную частоту свободных колебаний пластины и определяется жесткостью K упругих балочек подвеса по формуле
где E - модуль упругости материала упругих балочек, b - ширина, h - толщина и А - длина балочек.
Экспериментально установлено, что для обеспечения желательной частоты колебаний порядка 4 кГц при толщине и ширине балочек ~ 2 мкм требуемая длина балочек для использованного материала составляет примерно половину длины пластины. Ввиду этого примененная конструктивная схема подвеса с размещением балочек в параллельных прорезях пластины является оптимальной.
Одним из важнейших практических вопросов нормального функционирования прибора является обеспечение допустимого уровня демпфирования пластины в газовой среде при нормальном давлении. Обычная конструкция пластины при указанной частоте колебаний не обеспечивает требуемого демпфирования (оно слишком велико). Для его уменьшения предусмотрены сквозные отверстия в пластине. Опытным путем установлено, что оптимальный размер сторон для квадратной формы (или диагоналей для многоугольников с числом сторон, большем четырех) отверстий должен быть равным удвоенному значению начального зазора между электродами пластины и платы.
Таким образом, поставленная задача миниатюризации конструктивной схемы с одновременным расширением функциональных возможностей за счет обеспечения наряду с измерением угловой скорости измерения и линейного ускорения, причем в "прямом" и "обратном" направлениях, достигнута по сравнению с прототипом всей совокупностью признаков предложенных решений, в соответствии с описанием устройства прибора, его принципом действия и чертежами.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПЛАТФОРМЕННЫЙ ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 2000 |
|
RU2162203C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ БЛОКОВ | 2000 |
|
RU2162230C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 1993 |
|
RU2064682C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ УКЛОНОВ | 2000 |
|
RU2166732C1 |
| МИКРОМЕХАНИЧЕСКИЙ ДАТЧИК И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2003 |
|
RU2251114C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНОВ, КРИВИЗНЫ, НЕРОВНОСТИ И КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ ДОРОЖНОГО ПОКРЫТИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2162202C1 |
| ГИРОСКОП-АКСЕЛЕРОМЕТР | 2008 |
|
RU2381510C1 |
| УНИВЕРСАЛЬНЫЙ НАВИГАЦИОННЫЙ ПРИБОР УПРАВЛЕНИЯ ДВИЖЕНИЕМ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УНИФИЦИРОВАННАЯ ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЭТОГО ПРИБОРА | 2004 |
|
RU2263282C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2018 |
|
RU2684427C1 |
| Интегральный микромеханический гироскоп | 2021 |
|
RU2778622C1 |
Изобретение относится к измерительной технике, в частности к области приборостроения, и может найти применение в инерциальных системах подвижных объектов, в автопилотах авиа- и судомоделей и в системах безопасности транспортных средств. Гироскоп-акселерометр содержит плату из диэлектрического материала с напыленным на ней электродом датчика угла и датчика момента и инерционную массу, расположенную с зазором относительно платы и связанную с ней через упругие балочки, которые одними концами жестко прикреплены к опорам, расположенным на плате, а вторыми - к инерционной массе. Инерционная масса выполнена в виде пластины из электропроводного материала со сквозными отверстиями и боковыми гребенчатыми зубцами электродов пластины. На плате закреплены электроды системы возбуждения с гребенчатыми зубцами. Электроды соединены с электронной схемой обработки сигналов. В пластине выполнены по меньшей мере две сквозные параллельные прорези от периферии пластины до линии ее геометрического центра, в местах их пересечения с которой к пластине прикреплены концы упругих балочек, установленных в указанных прорезях с возможностью совершения колебаний в плоскости пластины и ортогонально к ней. Решается задача миниатюризации конструктивной схемы с одновременным расширением функциональных возможностей за счет обеспечения наряду с измерением угловой скорости измерения и линейного ускорения. 4 з.п.ф-лы, 4 ил.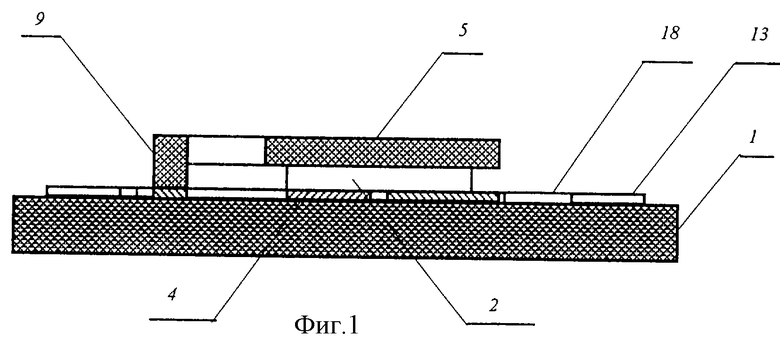
| ГЛАЗУРЬ | 2006 |
|
RU2320571C1 |
| US 5495761, 05.03.1996 | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| US 5392650, 28.02.1995 | |||
| EP 0664438 A1, 26.07.1995 | |||
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП (ЕГО ВАРИАНТЫ) | 1995 |
|
RU2085848C1 |
