Предлагаемое изобретение относится к области машиностроения, а именно к устройствам, обеспечивающим линейное перемещение рабочего органа по сложному контуру относительно обрабатываемого изделия по двум координатам, и может быть использовано при силомоментной обработке материалов на плоскости.
Известен координатный стол (патент RU 2244617), который содержит основание, состоящее из двух прямоугольных рам, средства перемещения в составе модуля продольного перемещения и модуля поперечного перемещения, систему кабель-каналов, программный блок управления и призматические борта треугольного сечения с фланцевым соединением.
Недостатками данного устройства является сложность конструкции, сложность технологии изготовления и большие габаритные размеры и масса.
Наиболее близким к заявленному техническому решению является манипулятор (патент RU 2224640 С1, опубл. 27.02.2004), который содержит привод с двумя подвижными основаниями, являющимися ведущими звеньями исполнительных механизмов, опорную площадку круглой формы с возможностью возвратно-поворотного движения на ней подвижных оснований. На опорной площадке закреплена кольцевая дорожка для взаимодействия посредством роликов с подвижными основаниями. Центр вращения каждого из подвижных оснований и центр опорной площадки совмещены.
Недостатком данного устройства является невозможность обеспечения линейного перемещения рабочего инструмента по сложному контуру, а также невозможность применения в области силомоментной обработки материала на плоскости.
Цель данного изобретения состоит в повышении технологических возможностей, увеличении точности и улучшении силомоментных показателей.
Поставленная задача достигается путем применения специально разработанного манипулятора, содержащего квадратный корпус 1, который неподвижно крепится над обрабатываемой поверхностью заготовки (на чертеже не показана) либо посредством крепежных отверстий 17, 18, 19, 20, либо ложится на заготовку и удерживается в процессе обработки действием своего веса. На подшипниках качения 14, 15, 16 подвижно закреплена круглая платформа 2, которая приводится во вращение электродвигателем 4, на валу которого установлена шестерня 22 через зубчатую передачу 24. На оси 13, расположенной на платформе 2, одним концом шарнирно закреплен рычаг 3, а второй ее конец, через подшипники качения 21, опирается на нижнюю поверхность опорной скобы 7 и верхнюю поверхность платформы 2. Опорная скоба 7 жестко закреплена на платформе при помощи стоек 8, 9, 10. Перемещение инструментальной штанги осуществляется вторым электродвигателем 6 посредством зубчатого сегмента 5. Расположенный на рычаге 3 рабочий инструмент 12 перемещается в сквозном пазу 11 платформы 2, который выполнен в виде дуги, проходящей через центр платформы, и расположен концентрично по отношению к центру вращения рычага.
Конструкция заявляемого устройства поясняется на фиг.1 и 2.
Устройство состоит из квадратного корпуса 1, платформы 2, рычага 3, электродвигателя 4, зубчатого сегмента 5, второго электродвигателя 6, опорной скобы 7, стоек 8, 9, 10, сквозного паза 11, рабочего инструмента 12, оси 13, подшипников качения 14, 15, 16, крепежных отверстий 17, 18, 19, 20, подшипников качения 21, шестерни 22, второй шестерни 23 и зубчатой передачи 24.
Предлагаемый манипулятор по сравнению с другими манипуляторами имеет повышенные силомоментные характеристики за счет расположения обрабатываемого изделия в непосредственной близости от платформы и применения направляющей, способной скомпенсировать усилия рычага при обработке высокоплотного материала, и имеет более компактные размеры.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 2008 |
|
RU2399478C1 |
| УСТРОЙСТВО ДЛЯ КОНТАКТНОЙ ОБРАБОТКИ ПЛОСКОГО МАТЕРИАЛА | 2009 |
|
RU2404041C1 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ (ВАРИАНТЫ) И СОЕДИНИТЕЛЬНАЯ КОНСТРУКЦИЯ ДЛЯ ПРИКРЕПЛЕНИЯ ЕГО КОНЦЕВОГО ЭФФЕКТОРА | 2013 |
|
RU2636191C2 |
| КОНФИГУРАЦИИ БЛОКИРОВКИ ПУСКОВОЙ СИСТЕМЫ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2013 |
|
RU2645408C2 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО С РОБОТИЗИРОВАННЫМ ПРИВОДОМ И АКТИВИРУЕМОЙ ВРУЧНУЮ РЕВЕРСИРУЮЩЕЙ СИСТЕМОЙ | 2013 |
|
RU2641977C2 |
| ПОВОРОТНЫЕ ПРИВОДНЫЕ КОНСТРУКЦИИ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2013 |
|
RU2640002C2 |
| КОНФИГУРАЦИИ ДИФФЕРЕНЦИАЛЬНОЙ БЛОКИРОВКИ ДЛЯ ПОВОРОТНЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ С ЭЛЕКТРОПИТАНИЕМ | 2013 |
|
RU2647778C2 |
| ПОВОРОТНЫЕ ОПОРНО-СОЕДИНИТЕЛЬНЫЕ УЗЛЫ ДЛЯ СОЕДИНЕНИЯ ПЕРВОЙ ЧАСТИ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА СО ВТОРОЙ ЧАСТЬЮ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2013 |
|
RU2640003C2 |
| УЗЛЫ ПОВОРОТНЫХ ПРИВОДНЫХ СТЕРЖНЕЙ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ С ШАРНИРНО ПОВОРАЧИВАЕМЫМИ КОНЦЕВЫМИ ЭФФЕКТОРАМИ | 2013 |
|
RU2639998C2 |
| СИСТЕМА ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА, ВКЛЮЧАЮЩАЯ СМЕННЫЕ КОНЦЕВЫЕ ЭФФЕКТОРЫ | 2013 |
|
RU2642947C2 |
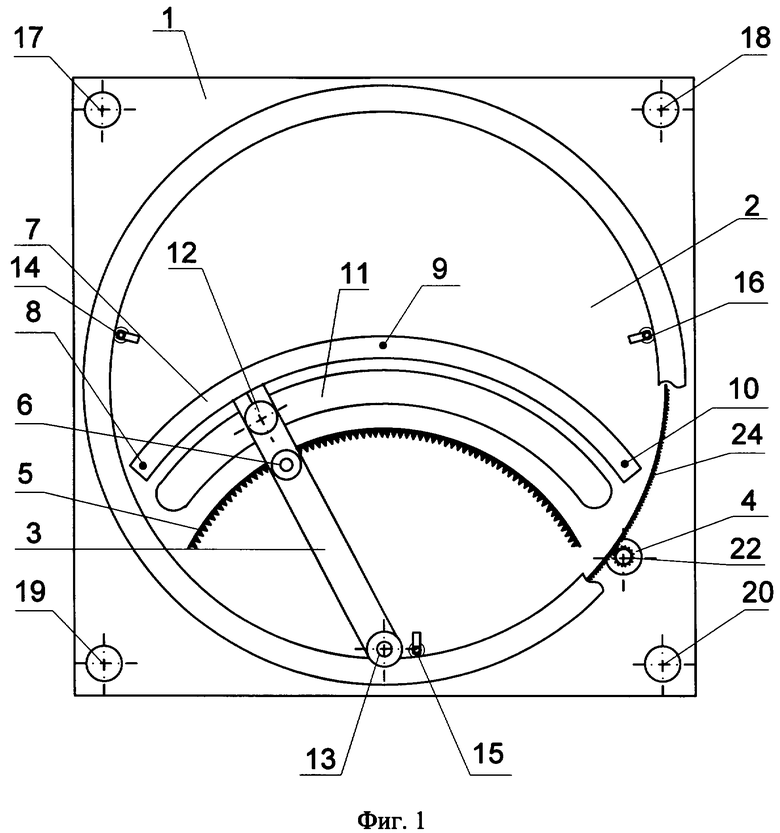
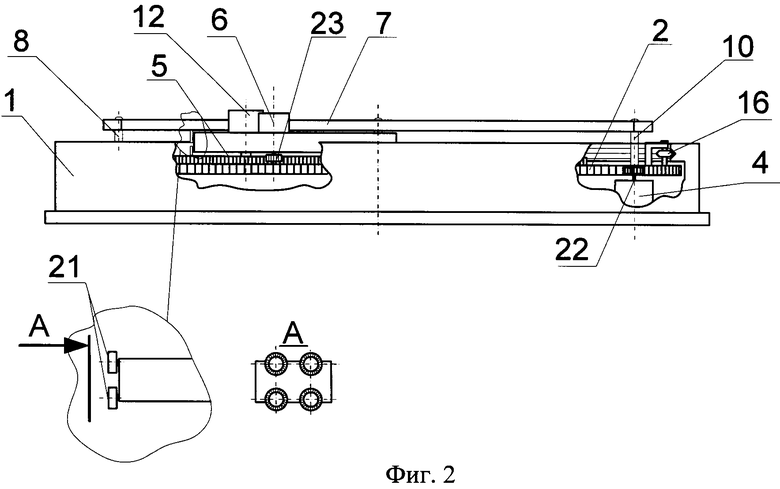
Изобретение относится к области машиностроения, а именно к устройствам, обеспечивающим линейное перемещение рабочего органа по сложному контуру относительно обрабатываемого изделия по двум координатам. Манипулятор содержит квадратный корпус с крепежными отверстиями, на котором установлена с возможностью вращения круглая платформа с закрепленным на ней с возможностью возвратно-вращательного движения рычагом, на котором установлен рабочий инструмент, и два электропривода. Один из электроприводов установлен в корпусе, а второй - закреплен на рычаге. Кромка платформы выполнена зубчатой, взаимодействующей с шестерней электропривода, установленного в корпусе. На платформе жестко закреплена опорная скоба, взаимодействующая в осевом направлении с концом рычага, установлен зубчатый сегмент, взаимодействующий с шестерней электропривода, закрепленного на рычаге, и выполнен дугообразный сквозной паз с возможностью перемещения в нем рабочего инструмента. Причем дугообразный паз и зубчатый сегмент расположены концентрично по отношению к центру вращения рычага. Изобретение позволит повысить технологические возможности и увеличить точность. 2 ил.
Манипулятор, характеризующийся тем, что содержит квадратный корпус с крепежными отверстиями, на котором установлена с возможностью вращения круглая платформа с закрепленным на ней с возможностью возвратно-вращательного движения рычагом, на котором установлен рабочий инструмент, и два электропривода, один из которых установлен в корпусе, а второй - закреплен на рычаге, при этом кромка платформы выполнена зубчатой, взаимодействующей с шестерней электропривода, установленного в корпусе, на платформе жестко закреплена опорная скоба, взаимодействующая в осевом направлении с концом рычага, установлен зубчатый сегмент, взаимодействующий с шестерней электропривода, закрепленного на рычаге, и выполнен дугообразный сквозной паз с возможностью перемещения в нем рабочего инструмента, причем дугообразный паз и зубчатый сегмент расположены концентрично по отношению к центру вращения рычага.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224640C1 |
| МАНИПУЛЯТОР | 1994 |
|
RU2066627C1 |
| НЕСУЩАЯ МЕХАНИЧЕСКАЯ СИСТЕМА | 2005 |
|
RU2301142C2 |
| Устройство для ориентации манипулятора | 1979 |
|
SU831616A1 |

